
Underwater Vehicle Positioning by Correntropy-Based Fuzzy Multi-Sensor Fusion


Abstract
:1. Introduction
1.1. Review of Previous Work
1.2. Novelty and Contributions of the Proposed Research
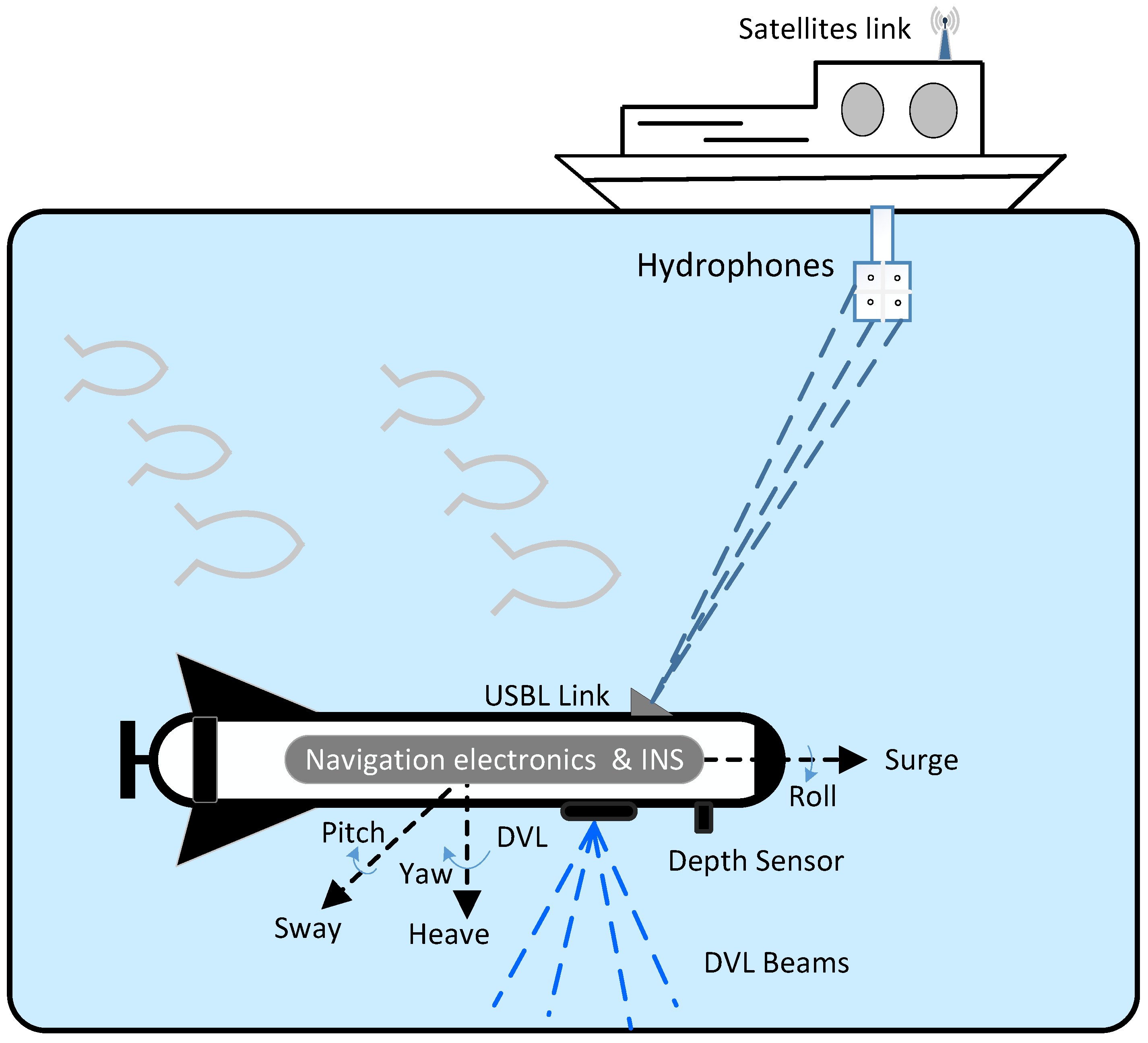
2. Mathematical Modeling of Underwater Vehicle Navigation
2.1. Mathematical Models of Navigation Sensors
2.2. Navigation Equations
3. Shortcomings of Kalman Filtering with Error Dynamic Model
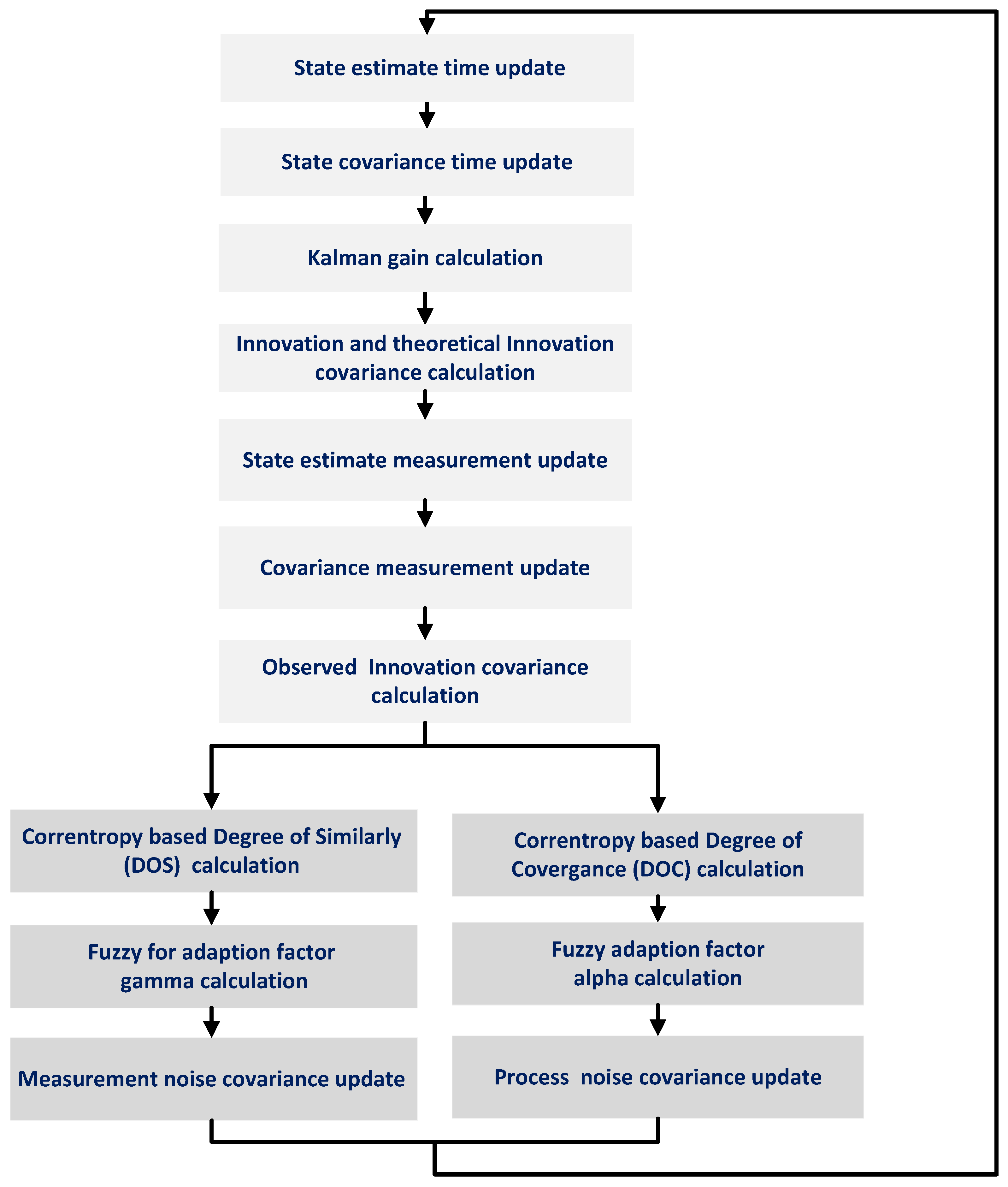
4. Correntropy-Based Fuzzy Multi-Sensor Fusion
4.1. Adaptation by Covariance Matching
4.2. Correntropy-Based Robust Adaptation of Process Noise Covariance by Gaussian Kernel
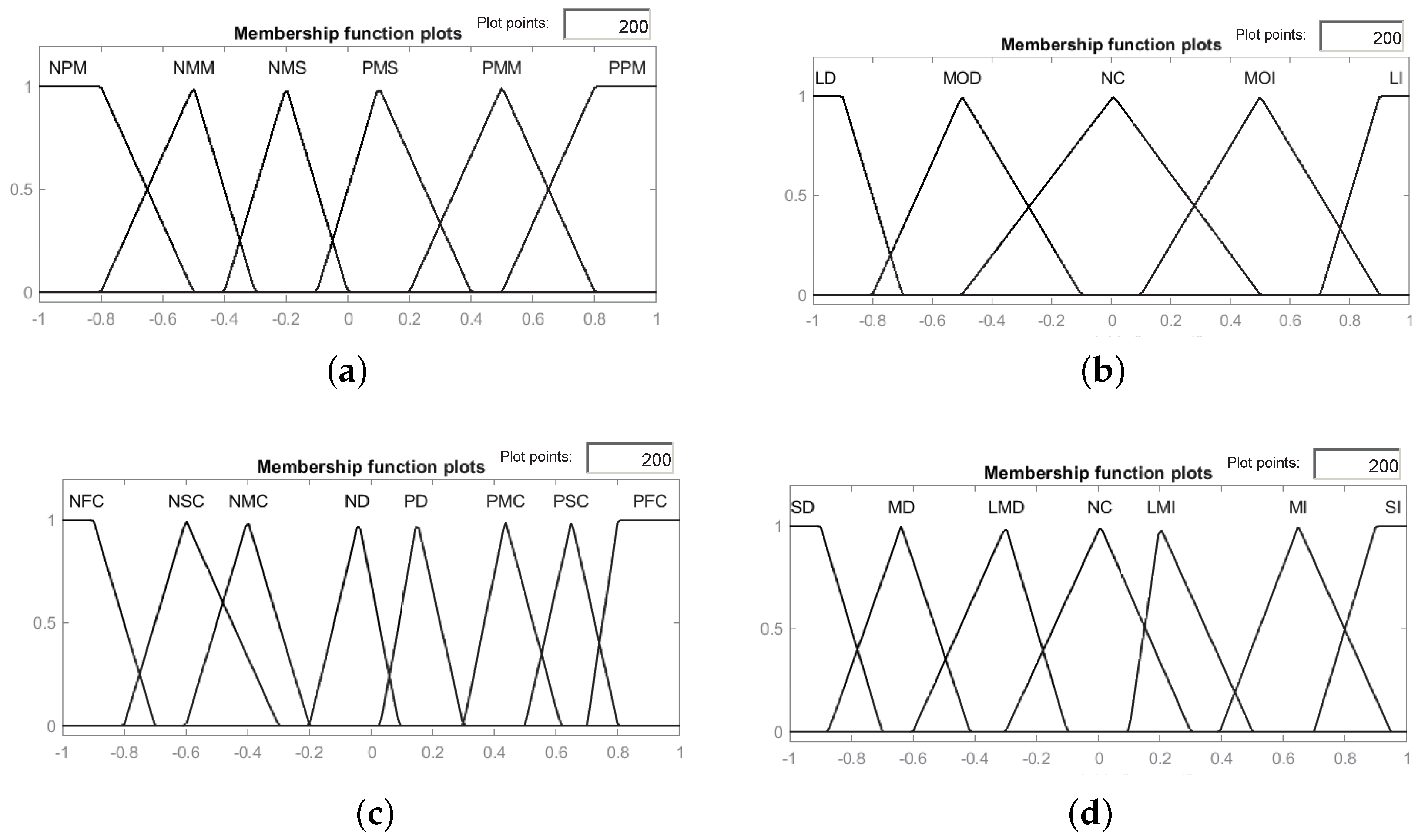
4.3. Fuzzification of Degree of Convergence
- IF is PFC THEN NC in
- IF is NFC THEN NC in
- IF is PMC THEN MD
- IF is NMC THEN MI
- IF is PSC THEN LMD
- IF is NSC THEN LMI
- IF is PD THEN SD in
- IF is ND THEN SI in
| Algorithm 1 Fuzzy Correntropy-based Kalman Filtering by Gaussian Kernel |
|
4.4. Correntropy-Based Robust Adaptation of Measurement Noise Covariance Using Versoria Kernel
4.5. Fuzzification of Degree Of Similarity
4.6. Fuzzy Rules and Membership Functions
- IF is PPM THEN NC in
- IF is NPM THEN NC in
- IF is PMM THEN MOD
- IF is NMM THEN MOI
- IF is PMS THEN LD in
- IF is NMS THEN LI in
| Algorithm 2 Fuzzy correntropy-based Kalman filtering by the Versoria kernel. |
|
5. Simulation Results and Discussion
5.1. Simulation Scenario
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, T.; Chen, L.; Yan, Y. Underwater Positioning Algorithm Based on SINS/LBL Integrated System. IEEE Access 2018, 6, 7157–7163. [Google Scholar] [CrossRef]
- Mehra, R.K. Approaches to Adaptive Filtering. IEEE Trans. Autom. Control. 1972, 17, 693–698. [Google Scholar] [CrossRef]
- Woo, R.; Yang, E.J.; Seo, D.W. A fuzzy-innovation-based adaptive Kalman filter for enhanced vehicle positioning in dense urban environments. Sensors 2019, 19, 1142. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdelnour, G.; Chand, S.; Chiu, S. Applying fuzzy logic to the Kalman filter divergence problem. In Proceedings of the IEEE Systems Man and Cybernetics Conference—SMC, Le Touquet, France, 17–20 October 1993; IEEE: New York, NY, USA, 1993; pp. 630–635. [Google Scholar] [CrossRef]
- Ren, Z.L.; Wang, L.G.; Bi, L. Improved Extended Kalman Filter Based on Fuzzy Adaptation for SLAM in Underground Tunnels. Int. J. Precis. Eng. Manuf. 2019, 20, 2119–2127. [Google Scholar] [CrossRef]
- Lalk, J. Intelligent adaptation of Kalman filters using fuzzy logic. IEEE Int. Conf. Fuzzy Syst. 1994, 2, 744–749. [Google Scholar] [CrossRef]
- Do, C.H.; Lin, H.Y. Incorporating neuro-fuzzy with extended Kalman filter for simultaneous localization and mapping. Int. J. Adv. Robot. Syst. 2019, 16, 1–13. [Google Scholar] [CrossRef]
- Fraser, C.T.; Ulrich, S. A fuzzy adaptive kalman filter for spacecraft formation navigation. In Proceedings of the American Control Conference, Philadelphia, PA, USA, 10–12 July 2019; pp. 2527–2533. [Google Scholar] [CrossRef]
- Gunduz, A.; Principe, J.C. Correntropy as a novel measure for nonlinearity tests. Signal Process. 2009, 89, 14–23. [Google Scholar] [CrossRef]
- Wang, G.; Gao, Z.; Zhang, Y.; Ma, B. Adaptive maximum correntropy gaussian filter based on variational bayes. Sensors 2018, 18, 1960. [Google Scholar] [CrossRef] [Green Version]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Zhang, L.; Sidoti, D.; Bienkowski, A.; Pattipati, K.R.; Bar-Shalom, Y.; Kleinman, D.L. On the identification of noise covariances and adaptive kalman filtering: A new look at a 50 year-old problem. IEEE Access 2020, 8, 59362–59388. [Google Scholar] [CrossRef]
- Li, S.; Jiang, X.; Liu, Y. Innovative Mars entry integrated navigation using modified multiple model adaptive estimation. Aerosp. Sci. Technol. 2014, 39, 403–413. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Or, B.; Bobrovsky, B.Z.; Klein, I. Kalman Filtering with Adaptive Step Size Using a Covariance based Criterion. IEEE Trans. Instrum. Meas. 2021, 70. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A Novel Adaptive Kalman Filter with Inaccurate Process and Measurement Noise Covariance Matrices. IEEE Trans. Autom. Control. 2018, 63, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Ji, D.; Liu, J.; Lin, Y. A Multi-Model EKF Integrated Navigation Algorithm for Deep Water AUV. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.C.; Yu, X.; Qin, H.D.; Zhu, Z.B. Adaptive kalman filter-based single-beacon underwater tracking with unknown effective sound velocity. Sensors 2018, 18, 4339. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Xu, X.; Hou, L. An Improved Adaptive Kalman Filter for Underwater SINS/DVL System. Math. Probl. Eng. 2020, 2020, 1–14. [Google Scholar] [CrossRef]
- He, K.; Liu, H.; Wang, Z. A novel adaptive two-stage information filter approach for deep-sea USBL/DVL integrated navigation. Sensors 2020, 20, 6029. [Google Scholar] [CrossRef]
- Davari, N.; Gholami, A. Variational Bayesian adaptive Kalman filter for asynchronous multirate multi-sensor integrated navigation system. Ocean Eng. 2019, 174, 108–116. [Google Scholar] [CrossRef]
- Zhang, X.; He, B.; Li, G.; Mu, X.; Zhou, Y.; Mang, T. Navnet: AUV Navigation through Deep Sequential Learning. IEEE Access 2020, 8, 59845–59861. [Google Scholar] [CrossRef]
- Mu, X.; He, B.; Zhang, X.; Song, Y.; Shen, Y.; Feng, C. End-to-end navigation for Autonomous Underwater Vehicle with Hybrid Recurrent Neural Networks. Ocean Eng. 2019, 194, 106602. [Google Scholar] [CrossRef]
- Gao, X.; Luo, H.; Ning, B.; Zhao, F.; Bao, L.; Gong, Y.; Xiao, Y.; Jiang, J. RL-AKF: An adaptive kalman filter navigation algorithm based on reinforcement learning for ground vehicles. Remote Sens. 2020, 12, 1704. [Google Scholar] [CrossRef]
- Salavasidis, G.; Munafò, A.; Harris, C.A.; Prampart, T.; Templeton, R.; Smart, M.; Roper, D.T.; Pebody, M.; McPhail, S.D.; Rogers, E.; et al. Terrain-aided navigation for long-endurance and deep-rated autonomous underwater vehicles. J. Field Robot. 2018, 36, rob.21832. [Google Scholar] [CrossRef] [Green Version]
- Melo, J.; Matos, A. On the use of particle filters for terrain based navigation of sensor-limited AUVs. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; IEEE: New York, NY, USA, 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Melo, J.; Matos, A. Survey on advances on terrain based navigation for autonomous underwater vehicles. Ocean Eng. 2017, 139, 250–264. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, P. MMAE terrain reference navigation for underwater vehicles using PCA. Int. J. Control. 2007, 80, 1008–1017. [Google Scholar] [CrossRef]
- Lee, J.; Bang, H. A Robust Terrain Aided Navigation Using the Rao-Blackwellized Particle Filter Trained by Long Short-Term Memory Networks. Sensors 2018, 18, 2886. [Google Scholar] [CrossRef] [Green Version]
- Sasiadek, J.Z.; Wang, Q. Fuzzy adaptive kalman filtering for INS/GPS data fusion. In Proceedings of the 2000 IEEE International Symposium on Intelligent Control. Held jointly with the 8th IEEE Mediterranean Conference on Control and Automation (Cat. No. 00CH37147), Patras, Greece, 19 July 2000; pp. 1911–1918. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Bucknall, R. A Robust Localization Method for Unmanned Surface Vehicle (USV) Navigation Using Fuzzy Adaptive Kalman Filtering. IEEE Access 2019, 7, 46071–46083. [Google Scholar] [CrossRef]
- Deilamsalehy, H.; Havens, T.C. Fuzzy adaptive extended Kalman filter for robot 3D pose estimation. Int. J. Intell. Unmanned Syst. 2018, 6, 50–68. [Google Scholar] [CrossRef]
- Jwo, D.J.; Cho, T.S. A practical note on evaluating Kalman filter performance optimality and degradation. Appl. Math. Comput. 2007, 193, 482–505. [Google Scholar] [CrossRef]
- Jwo, D.J.; Chung, F.C.; Weng, T.P. Adaptive Kalman Filter for Navigation Sensor Fusion. In Sensor Fusion and Its Applications; Sciyo: London, UK, 2010. [Google Scholar] [CrossRef] [Green Version]
- Fraser, C.T.; Ulrich, S. Adaptive extended Kalman filtering strategies for spacecraft formation relative navigation. Acta Astronaut. 2021, 178, 700–721. [Google Scholar] [CrossRef]
- Fauske, K.; Hallingstad, O. A Comparison of Outlier Detection Algorithms for Hydro-Acoustic Positioning. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; IEEE: New York, NY, USA, 2006; Volume 3, pp. 1–6. [Google Scholar] [CrossRef]
- Vaganay, J.; Leonard, J.J.; Bellingham, J.G. Outlier rejection for autonomous acoustic navigation. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 3, pp. 2174–2181. [Google Scholar] [CrossRef]
- Fakoorian, S.; Izanloo, R.; Shamshirgaran, A.; Simon, D. Maximum Correntropy Criterion Kalman Filter with Adaptive Kernel Size. In Proceedings of the IEEE National Aerospace Electronics Conference, NAECON, Dayton, OH, USA, 15–19 July 2019; pp. 581–584. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Shi, P.; Wu, Z.; Qian, J.; Chambers, J.A. Robust Kalman Filters Based on Gaussian Scale Mixture Distributions with Application to Target Tracking. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2082–2096. [Google Scholar] [CrossRef]
- Farrell, J.A. Aided Navigation GPS with High Rate Sensors, 1st ed.; The McGraw-Hill Companies: New York, NY, USA, 2008; p. 553. [Google Scholar]
- Shaukat, N.; Ali, A.; Iqbal, M.J.; Moinuddin, M.; Otero, P. Multi-sensor fusion for underwater vehicle localization by augmentation of rbf neural network and error-state kalman filter. Sensors 2021, 21, 1149. [Google Scholar] [CrossRef]
- Hegrenaes, O.; Ramstad, A.; Pedersen, T.; Velasco, D. Validation of a new generation DVL for underwater vehicle navigation. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; IEEE: New York, NY, USA; 2016; pp. 342–348. [Google Scholar] [CrossRef]
- Healey, A.; An, E.; Marco, D. Online compensation of heading sensor bias for low cost AUVs. In Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles (Cat. No.98CH36290), Cambridge, MA, USA, 20–21 August 1998; IEEE: New York, NY, USA, 1998; pp. 35–42. [Google Scholar] [CrossRef] [Green Version]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Engineering and Technology, Michael Faraday House: Stevenage, UK, 2004. [Google Scholar] [CrossRef]
- Savage, P.G. Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity and Position Algorithms. J. Guid. Control. Dyn. 1998, 21, 208–221. [Google Scholar] [CrossRef]
- Miller, P.A.; Farrell, J.A.; Zhao, Y.; Djapic, V. Autonomous Underwater Vehicle Navigation. IEEE J. Ocean Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control System-Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002; Volume 53, pp. 1689–1699. [Google Scholar] [CrossRef]
- Sasiadek, J.Z.; Khe, J. Sensor fusion based on fuzzy Kalman filter. In Proceedings of the 2nd International Workshop on Robot Motion and Control, RoMoCo, Bukowy Dworek, Poland, 18–20 October 2001; pp. 275–283. [Google Scholar] [CrossRef]
- Jwo, D.J.; Wang, S.H. Adaptive fuzzy strong tracking extended Kalman filtering for GPS navigation. IEEE Sens. J. 2007, 7, 778–789. [Google Scholar] [CrossRef]
- Wang, G.; Li, N.; Zhang, Y. Distributed maximum correntropy linear and nonlinear filters for systems with non-Gaussian noises. Signal Process. 2021, 182, 107937. [Google Scholar] [CrossRef]
- da Silva, A.L.; da Cruz, J.J. Fuzzy adaptive extended Kalman filter for UAV INS/GPS data fusion. J. Braz. Soc. Mech. Sci. Eng. 2016, 38, 1671–1688. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, H.; Wang, G. Projected Kernel Recursive Maximum Correntropy. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 963–967. [Google Scholar] [CrossRef]
- Izanloo, R.; Fakoorian, S.A.; Yazdi, H.S.; Simon, D. Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise. In Proceedings of the 2016 50th Annual Conference on Information Systems and Sciences, CISS 2016, Princeton, NJ, USA, 15–18 March 2016; pp. 500–505. [Google Scholar] [CrossRef]
- Tsai, C.C.; Lin, H.H.; Hsu, J.C. Fuzzy adaptive extended information filtering. Int. J. Fuzzy Syst. 2005, 7, 31–38. [Google Scholar]
- Fusion, D. Sensor and Data Fusion; IntechOpen: London, UK, 2012. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, J.; Zhang, S. Maximum Versoria Criterion-Based Robust Adaptive Filtering Algorithm. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 1252–1256. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | KF-MSF | F-MSF | FC-MSF |
|---|---|---|---|
| North Position | 26.887 | 2.145 | 0.345 |
| East Position | 39.562 | 2.469 | 0.412 |
| Down Position | 9.513 | 0.353 | 0.051 |
| Avg Position | 25.321 | 1.655 | 0.269 |
| North Velocity | 1.608 | 0.388 | 0.146 |
| East Velocity | 1.529 | 0.485 | 0.121 |
| Down Velocity | 0.159 | 0.148 | 0.067 |
| Avg Velocity | 1.331 | 0.308 | 0.125 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaukat, N.; Moinuddin, M.; Otero, P. Underwater Vehicle Positioning by Correntropy-Based Fuzzy Multi-Sensor Fusion. Sensors 2021, 21, 6165. https://doi.org/10.3390/s21186165
Shaukat N, Moinuddin M, Otero P. Underwater Vehicle Positioning by Correntropy-Based Fuzzy Multi-Sensor Fusion. Sensors. 2021; 21(18):6165. https://doi.org/10.3390/s21186165
Chicago/Turabian StyleShaukat, Nabil, Muhammad Moinuddin, and Pablo Otero. 2021. "Underwater Vehicle Positioning by Correntropy-Based Fuzzy Multi-Sensor Fusion" Sensors 21, no. 18: 6165. https://doi.org/10.3390/s21186165
APA StyleShaukat, N., Moinuddin, M., & Otero, P. (2021). Underwater Vehicle Positioning by Correntropy-Based Fuzzy Multi-Sensor Fusion. Sensors, 21(18), 6165. https://doi.org/10.3390/s21186165