
A Tutorial on Hardware-Implemented Fault Injection and Online Fault Diagnosis for High-Speed Trains




Abstract
:1. Introduction
- 1.
- Introduce an integrated validation platform where FI and FD can work together in real time.
- 2.
- Base an evaluation system for FD systems where various performance indexes are defined.
- 3.
- Review the data-driven FD literature whose verification is based the designed HIL platform.
2. Background
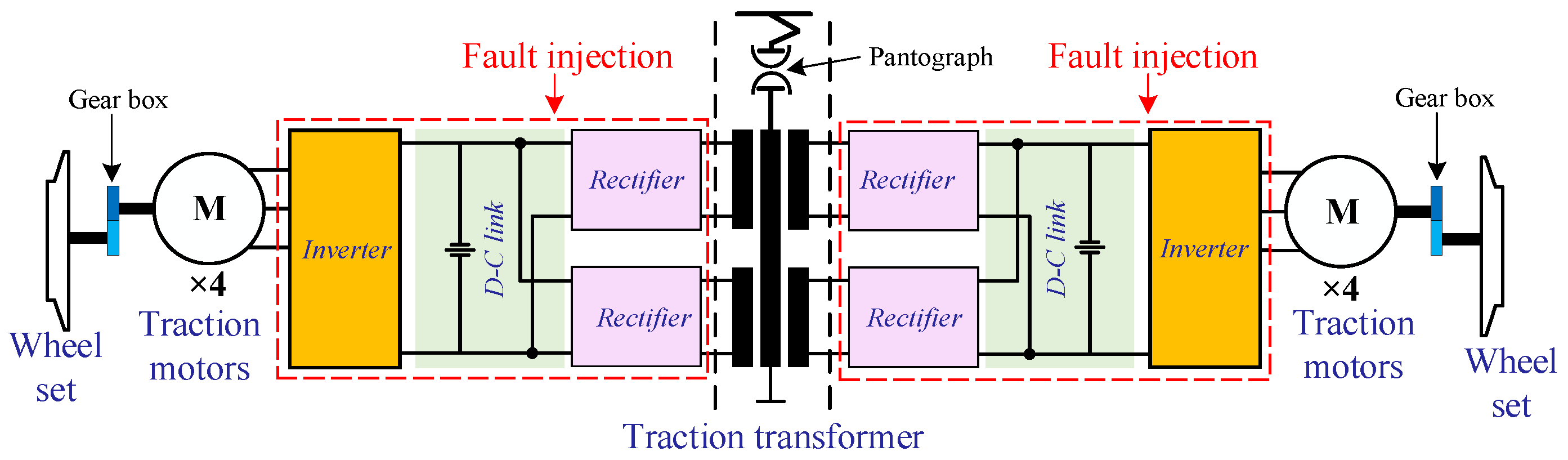
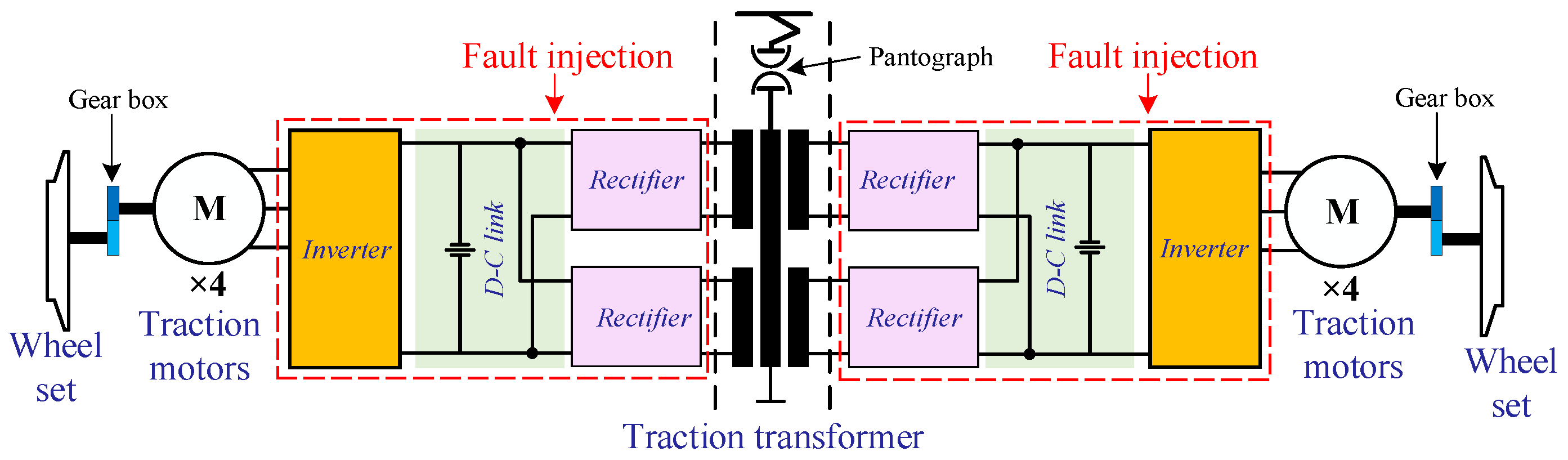
2.1. Electrical Drive Systems of High-Speed Trains
2.2. Fault Types
- 1.
- Sensor faults: Faults may happen in voltage sensors, current sensors, speed sensors, temperature sensors, etc.
- 2.
- Converter faults: Aging components such as performance degradation of capacitance, short- and open-circuit of insulated-gate bipolar transistors (IGBTs) are common faults appearing in traction converters.
- 3.
- Motor faults: Rotor-broken bar, air-gap eccentricity, together with interturn-short circuits will induce faults in traction motors.
- 4.
- Control-unit faults: Errors in both analog and digital signals are responsible for faults in traction control units.
- 1.
- Permanent faults: Some hardware malfunctions such as open circuit of IGBT and gear war belong to the permanent faults.
- 2.
- Intermittent/Transient faults: These faults appear, disappear and reappear nondeterministically, and the duration time is short such that important features are difficult to be captured [26].
- 1.
- Incipient faults: This type of fault is usually characterized by small amplitudes, tiny influences and common faults as time goes on [24]. These faults in electrical drive systems of high-speed trains are, for example, sensor faults and aging components.
- 2.
- Common faults: There are some kinds of faults that have larger amplitudes than incipient faults and at the same time affect the performance of trains in a considerable means. Timely maintenance is necessary when they occur.
- 3.
- Failures: The failure means malfunctions of components or systems. It usually results in system performance far from the acceptable operation. The broken IGBT will distort three-phase currents, causing degraded traction efficiency.
2.3. Objectives
3. Fault Injection Methodology
3.1. Signal-Based Fault Injection Methods
- (1)
- If is the transient fault, then
- (2)
- If is the intermittent fault, then
- (3)
- If is the permanent fault, then
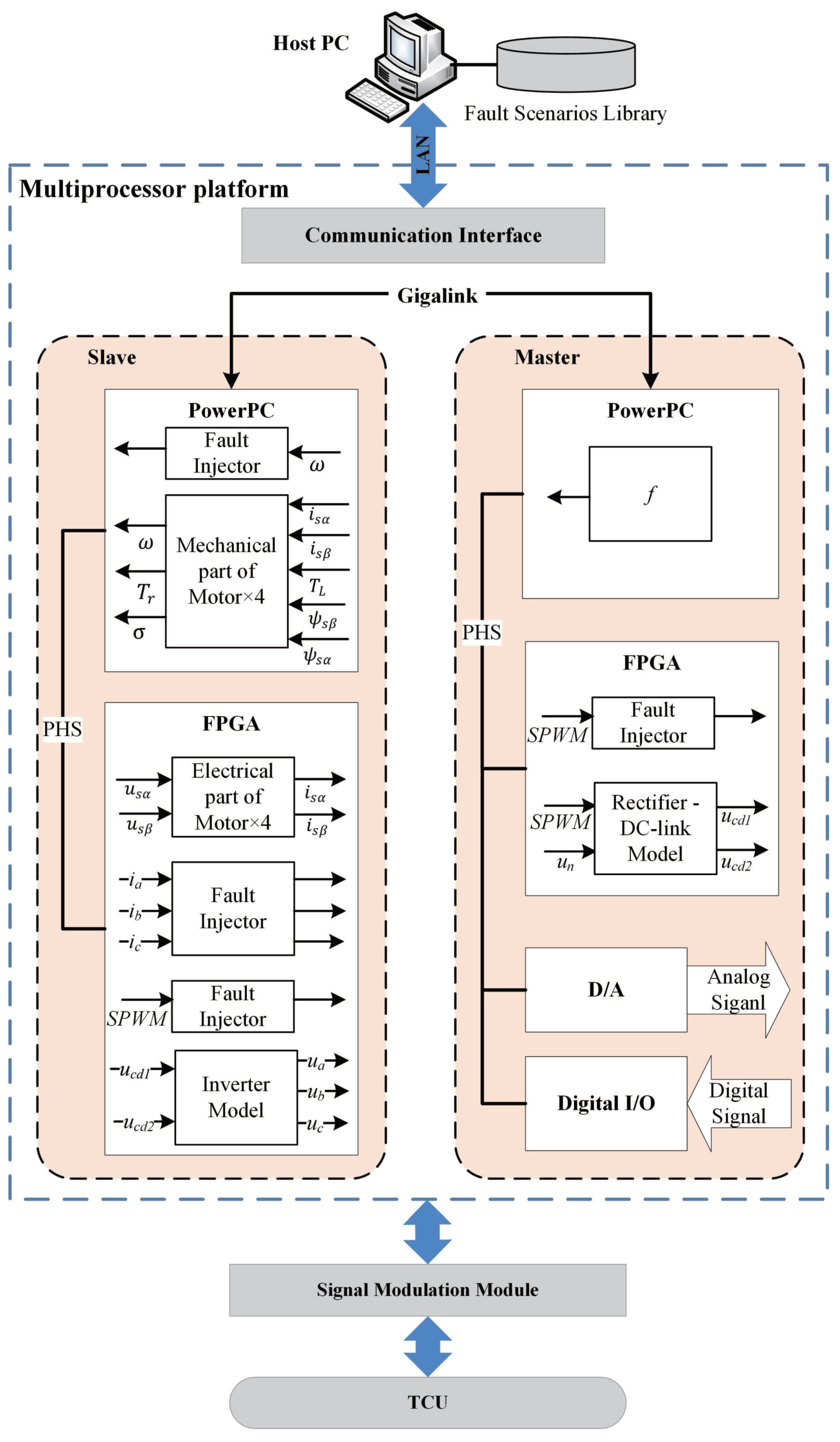
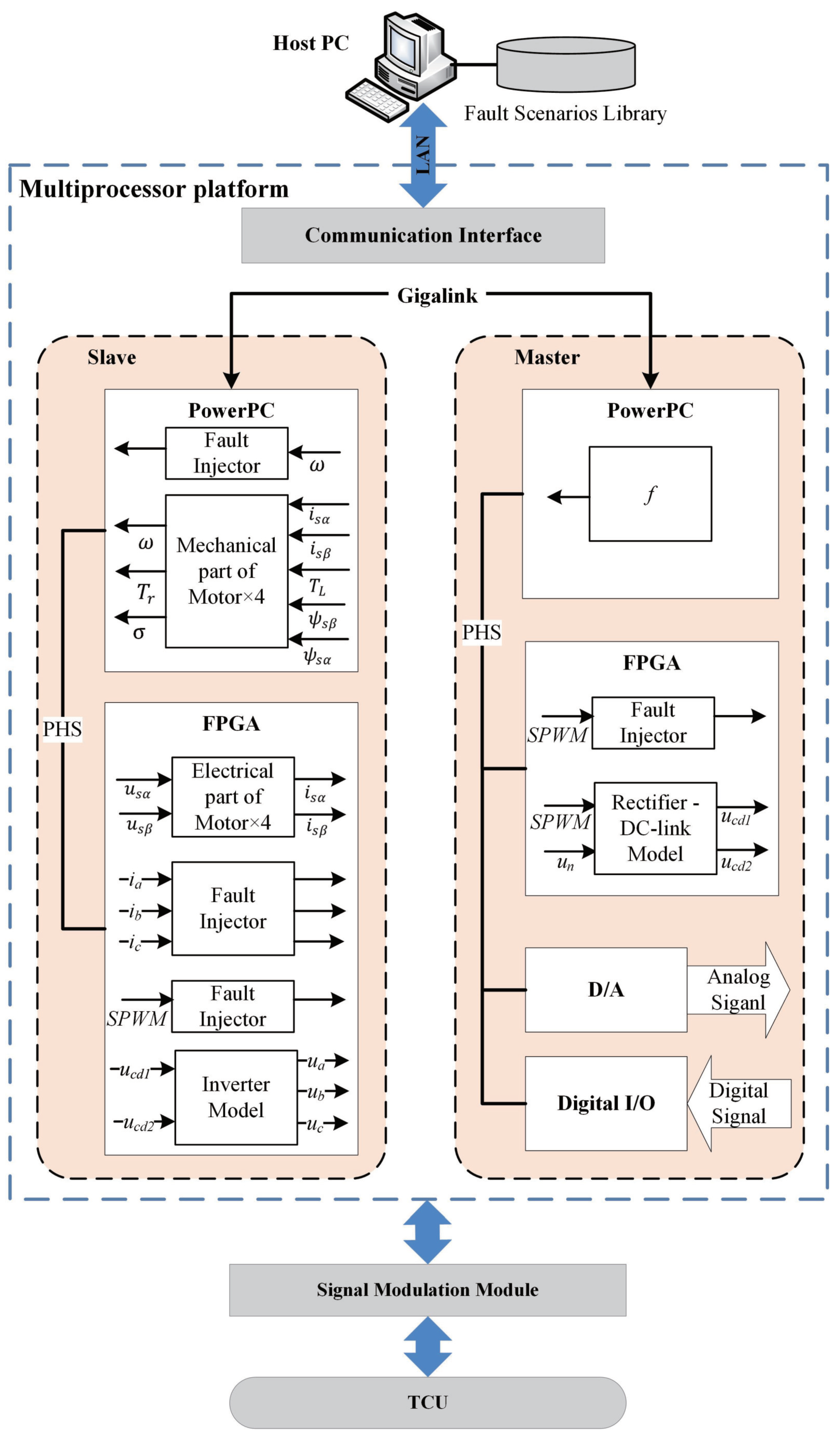
3.2. Hardware-in-the-Loop Fault Injection for Traction Systems
- (1)
- A real-time simulation of models consumes a large amount of FPGA resources, especially for power electronics-based apparatus. However, not all models are required for such a short execution time.
- (2)
- High FPGA resources will be consumed when the FI signals are inserted.
4. Fault Diagnosis Methodology
4.1. Fault Detection
- (1)
- To extract fault features that are helpful for addressing high-frequency (online) data.
- (2)
- To define a test statistic, based on which a reliable detection result of faults can be returned.
4.1.1. Data-Driven Feature Extraction
4.1.2. Definition of Test Statistics
4.2. Fault Diagnosis
4.3. Comprehensive Evaluation Indices
4.4. An Overview of FD Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Givoni, M. Development and impact of the modern high-speed train: A review. Transp. Rev. 2006, 26, 593–611. [Google Scholar] [CrossRef]
- Zhang, S. Fundamental Application Theory and Engineering Technology for Railway High-Speed Trains; Science Press: Beijing, China, 2007. [Google Scholar]
- Romanenko, A.; Muetze, A.; Ahola, J. Incipient bearing damage monitoring of 940-h variable speed drive system operation. IEEE Trans. Energy Convers. 2017, 32, 99–110. [Google Scholar] [CrossRef]
- Chen, Z.; Haynes, K.E. Chinese Railways in the Era of High-Speed; Emerald Group Publishing Limited: Bingley, West Yorkshire, UK, 2015. [Google Scholar]
- Chen, H.; Jiang, B. A review of fault detection and diagnosis for the traction system in high-speed trains. IEEE Trans. Intell. Transp. Syst. 2020, 21, 450–465. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges, and perspectives. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Garramiola, F.; Poza, J.; Madina, P.; del Olmo, J.; Ugalde, G. A hybrid sensor fault diagnosis for maintenance in railway traction drives. Sensors 2020, 20, 962. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Wang, W.; Sun, Y. Performance degradation monitoring for onboard speed sensors of trains. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1287–1297. [Google Scholar] [CrossRef]
- Feng, D.; Lin, S.; Yang, Q.; Lin, X.; He, Z.; Li, W. Reliability evaluation for traction power supply system of high-speed railway considering relay protection. IEEE Trans. Transport. Electrific. 2019, 5, 285–298. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Wang, Y. Incipient winding fault detection and diagnosis for squirrel-cage induction motors equipped on CRH trains. ISA Trans. 2020, 99, 488–495. [Google Scholar] [CrossRef]
- Yang, C.; Yang, C.; Peng, T.; Yang, X.; Gui, W. A fault-injection strategy for traction drive control systems. IEEE Trans. Ind. Electron. 2017, 64, 5719–5727. [Google Scholar] [CrossRef]
- Yang, X.; Yang, C.; Peng, T.; Chen, Z.; Liu, B.; Gui, W. Hardware-in-the-loop fault injection for traction control system. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 696–706. [Google Scholar] [CrossRef]
- Arlat, J.; Aguera, M.; Amat, L.; Crouzet, Y.; Fabre, J.C.; Laprie, J.C.; Martins, E.; Powell, D. Fault injection for dependability validation: A methodology and some applications. IEEE Trans. Softw. Eng. 1990, 16, 166–182. [Google Scholar] [CrossRef]
- Benso, A.; Prinetto, P. Fault Injection Techniques and Tools for Embedded Systems Reliability Evaluation; Springer: New York, NY, USA, 2003. [Google Scholar]
- Andrés, D.D.; Ruiz, J.C.; Gil, D.; Gil, P. Fault emulation for dependability evaluation of VLSI systems. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2008, 16, 422–431. [Google Scholar] [CrossRef]
- Lu, A.; Yang, G. False data injection attacks against state estimation in the presence of sensor failures. Inform. Sci. 2020, 508, 92–104. [Google Scholar] [CrossRef]
- Hasanzadeh, A.; Edrington, C.S.; Stroupe, N.; Bevis, T. Real-time emulation of a high-speed microturbine permanent-magnet synchronous generator using multiplatform hardware-in-the-loop realization. IEEE Trans. Ind. Electron. 2014, 61, 3109–3118. [Google Scholar] [CrossRef]
- Gou, B.; Ge, X.; Wang, S.; Feng, X.; Kuo, J.B.; Habetler, T.G. An open-switch fault diagnosis method for single-phase PWM rectifier using a model-based approach in high-speed railway electrical traction drive system. IEEE Trans. Power Electron. 2016, 31, 3816–3826. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Lu, N. A Descriptor System Approach for Estimation of Incipient Faults With Application to High-Speed Railway Traction Devices. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2108–2118. [Google Scholar] [CrossRef]
- Estima, J.O.; Cardoso, A.J.M. A new algorithm for real-time multiple open-circuit fault diagnosis in voltage-fed PWM motor drives by the reference current errors. IEEE Trans. Ind. Electron. 2012, 60, 3496–3505. [Google Scholar] [CrossRef]
- Henao, H.; Kia, S.H.; Capolino, G.A. Torsional-vibration assessment and gear-fault diagnosis in railway traction system. IEEE Trans. Ind. Electron. 2011, 58, 1707–1717. [Google Scholar] [CrossRef]
- Cabal-Yepez, E.; Garcia-Ramirez, A.G.; Romero-Troncoso, R.J.; Garcia-Perez, A.; Osornio-Rios, R.A. Reconfigurable monitoring system for time-frequency analysis on industrial equipment through STFT and SWT. IEEE Trans. Ind. Informat. 2013, 9, 760–771. [Google Scholar] [CrossRef]
- Bennett, S.M.; Patton, R.J.; Daley, S. Sensor fault-tolerant control of a rail traction drive. Control Eng. Pract. 1999, 7, 217–225. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Lu, N.; Chen, W. Data-Driven Detection and Diagnosis of Faults in Traction Systems of High-Speed Trains; Springer Nature: Cham, Switzerland, 2020. [Google Scholar]
- Chen, H.; Jiang, B.; Ding, S.X.; Lu, N.; Chen, W. Probability-relevant incipient fault detection and diagnosis methodology with applications to electric drive systems. IEEE Trans. Control Syst. Technol. 2019, 27, 2766–2773. [Google Scholar] [CrossRef]
- Zhou, D.; Zhao, Y.; Wang, Z.; He, X.; Gao, M. Review on diagnosis techniques for intermittent faults in dynamic systems. IEEE Trans. Ind. Electron. 2020, 67, 2337–2347. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X. A broad learning aided data-driven framework of fast fault diagnosis for high-speed trains. IEEE Intell. Transp. Syst. Mag. 2019, 13, 83–88. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, S.X.; Peng, T.; Yang, C.; Gui, W. Fault detection for non-Gaussian processes using generalized canonical correlation analysis and randomized algorithms. IEEE Trans. Ind. Electron. 2018, 65, 1559–1567. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Zhang, T.; Lu, N. Data-driven and deep learning-based detection and diagnosis of incipient faults with application to electrical traction systems. Neurocomputing 2020, 369, 429–437. [Google Scholar] [CrossRef]
- Hyvärinen, A.; Karhunen, J.; Oja, E. Independent Component Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Chen, Z.; Liu, C.; Ding, S.X.; Peng, T.; Yang, C.; Gui, W.; Shardt, Y.A.W. A just-in-time-learning aided canonical correlation analysis method for multimode process monitoring and fault detection. IEEE Trans. Ind. Electron. 2020, 68, 5259–5270. [Google Scholar] [CrossRef]
- Anderson, T. An Introduction to Multivariate Statistical Analysis, 2nd ed.; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Luo, H.; Yang, X.; Krueger, M.; Ding, S.X.; Peng, K. A plug-and-play monitoring and control architecture for disturbance compensation in rolling mills. IEEE/ASME Trans. Mechatron. 2018, 23, 200–210. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Chen, W.; Li, Z. Edge computing aided framework of fault detection for traction control systems in high-speed trains. IEEE Trans. Veh. Technol. 2020, 69, 1309–1318. [Google Scholar] [CrossRef]
- Ding, S.X. Data-Driven Design of Fault Diagnosis and Fault-Tolerant Control Systems; Springer: London, UK, 2014. [Google Scholar]
- Yang, C.; Peng, T.; Tao, H.; Yang, C.; Gui, W. Review of recent research on fault injection for high-speed train information control systems. Sci. Inf. Sci. 2020, 50, 465–482. [Google Scholar]
- Guo, T.; Sang, J.; Chen, M.; Zhang, J.; Tai, X.; Zhou, D. A fault detection method for a braking system of high-speed trains. Sci. Inf. Sci. 2020, 50, 483–495. [Google Scholar] [CrossRef]
- Liu, Q.; Zhan, Z.; Wang, S.; Liu, Y.; Fang, T. Data-driven multimodal operation monitoring and fault diagnosis of high-speed train bearings. Sci. Inf. Sci. 2020, 50, 527–539. [Google Scholar]
- Li, X.; Xu, J.; Chen, Z.; Xu, S.; Liu, K. Real-Time Fault Diagnosis of Pulse Rectifier in Traction System Based on Structural Model. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Chen, H.; Chai, Z.; Jiang, B.; Huang, B. Data-Driven Fault Detection for Dynamic Systems With Performance Degradation: A Unified Transfer Learning Framework. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Cheng, C.; Qiao, X.; Luo, H.; Wang, G.; Teng, W.; Zhang, B. Data-Driven Incipient Fault Detection and Diagnosis for the Running Gear in High-Speed Trains. IEEE Trans. Veh. Technol. 2020, 69, 9566–9576. [Google Scholar] [CrossRef]
- Cheng, C.; Qiao, X.; Zhang, B.; Luo, H.; Zhou, Y.; Chen, H. Multiblock Dynamic Slow Feature Analysis-Based System Monitoring for Electrical Drives of High-Speed Trains. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| Features | Approaches |
|---|---|
| Mean | Expectation operation |
| Variance/covariance | Principal component analysis |
| High-order statistics | Independent component analysis |
| Correlation | Canonical correlation analysis |
| Slope | First-order difference |
| Entropy | Mutual information |
| Waveform index | Wavelet transform |
| Root mean square | Partial least squares |
| Standards of Quality | Faults Types | |||
|---|---|---|---|---|
| A | B | C | D | |
| Main transformer and its cooling | Poor cleaning | Loose wiring, and invalid desiccant | Abnormal fan rotation and low liquid level or oil spill | Traction converter faults |
| Traction converter and its control | Poor cleaning | Loose wiring, and invalid desiccant | Abnormal fan rotation and traction converter faults | None |
| Traction motor and its cooling | Poor installation of oil filling plug and unstable cooling duct | Loose fittings, broken wiring, missing oil injection plug and blocked exhaust | Loose and damaged power line, sensor and wiring | Cracked mount and bad motor |
| Auxiliary converter | None | None | One dysfunction | Two dysfunctions |
| Fault Levels | True Scores |
|---|---|
| A | 900–1000 |
| B | 800–899 |
| C | 700–799 |
| D | 699 or less |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Qiao, X.; Cheng, C.; Zhong, K.; Chen, H. A Tutorial on Hardware-Implemented Fault Injection and Online Fault Diagnosis for High-Speed Trains. Sensors 2021, 21, 5957. https://doi.org/10.3390/s21175957
Yang X, Qiao X, Cheng C, Zhong K, Chen H. A Tutorial on Hardware-Implemented Fault Injection and Online Fault Diagnosis for High-Speed Trains. Sensors. 2021; 21(17):5957. https://doi.org/10.3390/s21175957
Chicago/Turabian StyleYang, Xiaoyue, Xinyu Qiao, Chao Cheng, Kai Zhong, and Hongtian Chen. 2021. "A Tutorial on Hardware-Implemented Fault Injection and Online Fault Diagnosis for High-Speed Trains" Sensors 21, no. 17: 5957. https://doi.org/10.3390/s21175957
APA StyleYang, X., Qiao, X., Cheng, C., Zhong, K., & Chen, H. (2021). A Tutorial on Hardware-Implemented Fault Injection and Online Fault Diagnosis for High-Speed Trains. Sensors, 21(17), 5957. https://doi.org/10.3390/s21175957