Performance Evaluation of Precise Point Positioning for BeiDou-3 B1c/B2a Signals in the Global Range


Abstract
:1. Introduction
2. Model and Parameter Estimation
2.1. Positioning Function Model
2.2. Kalman Filtering
3. Experimental Evaluation
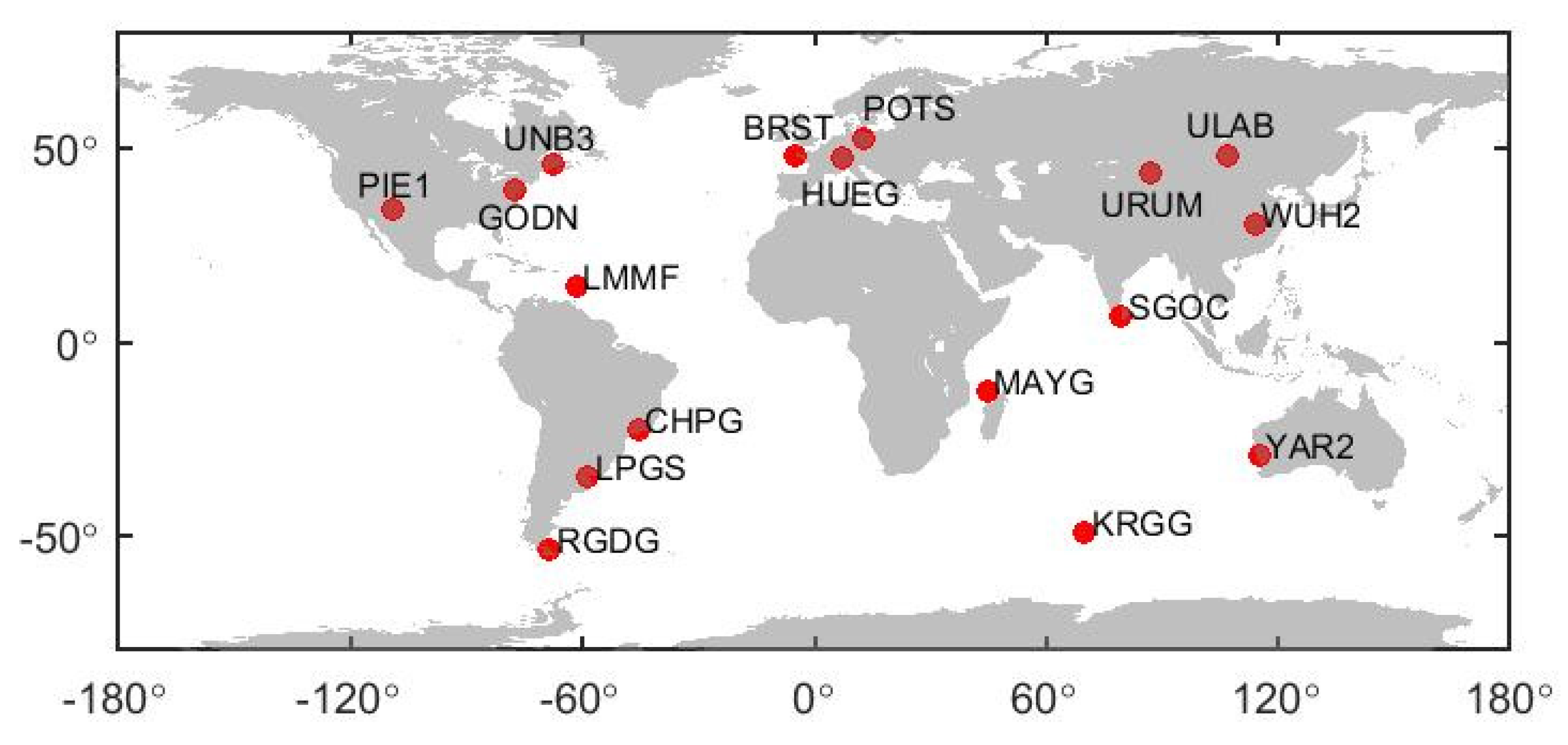
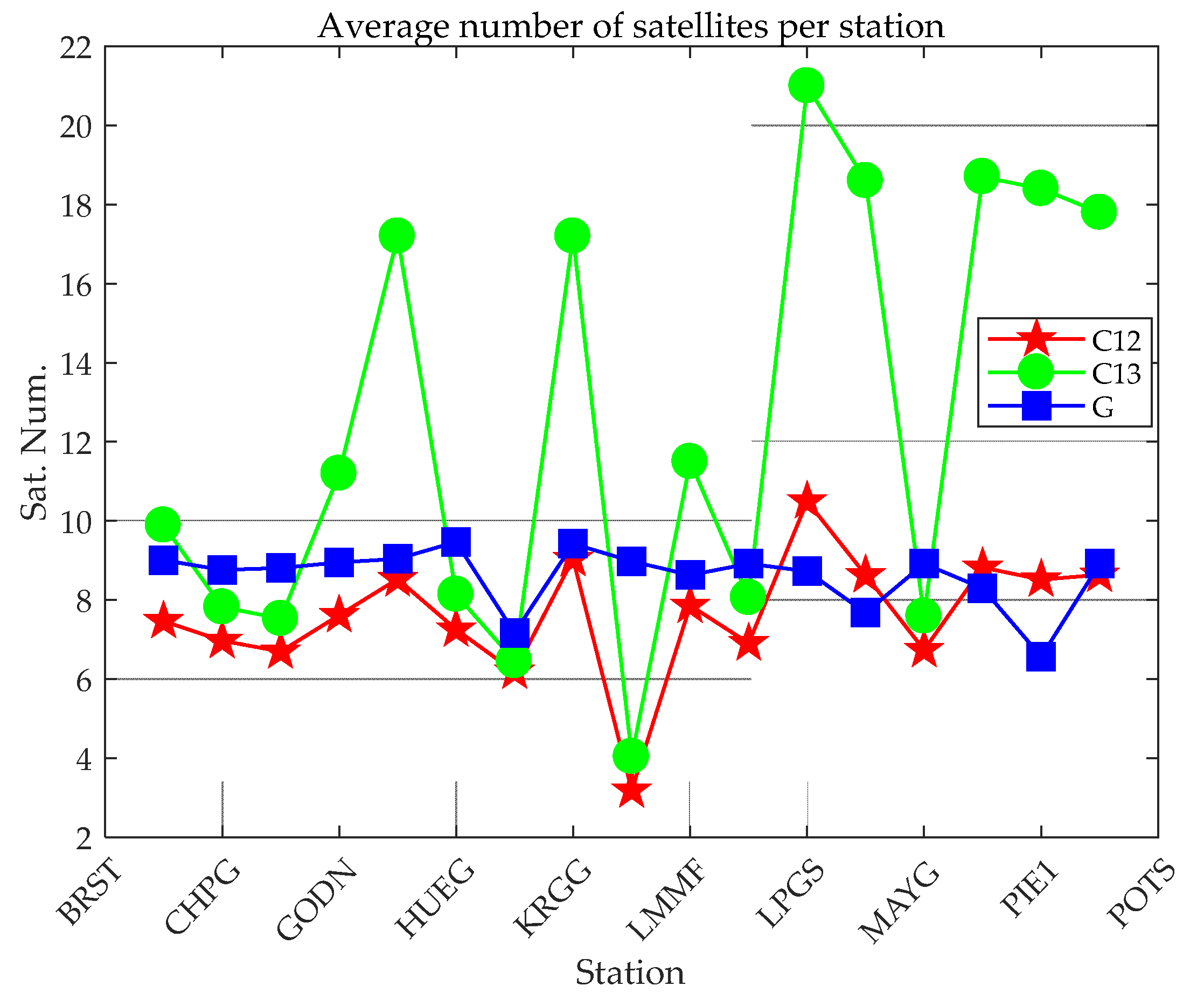
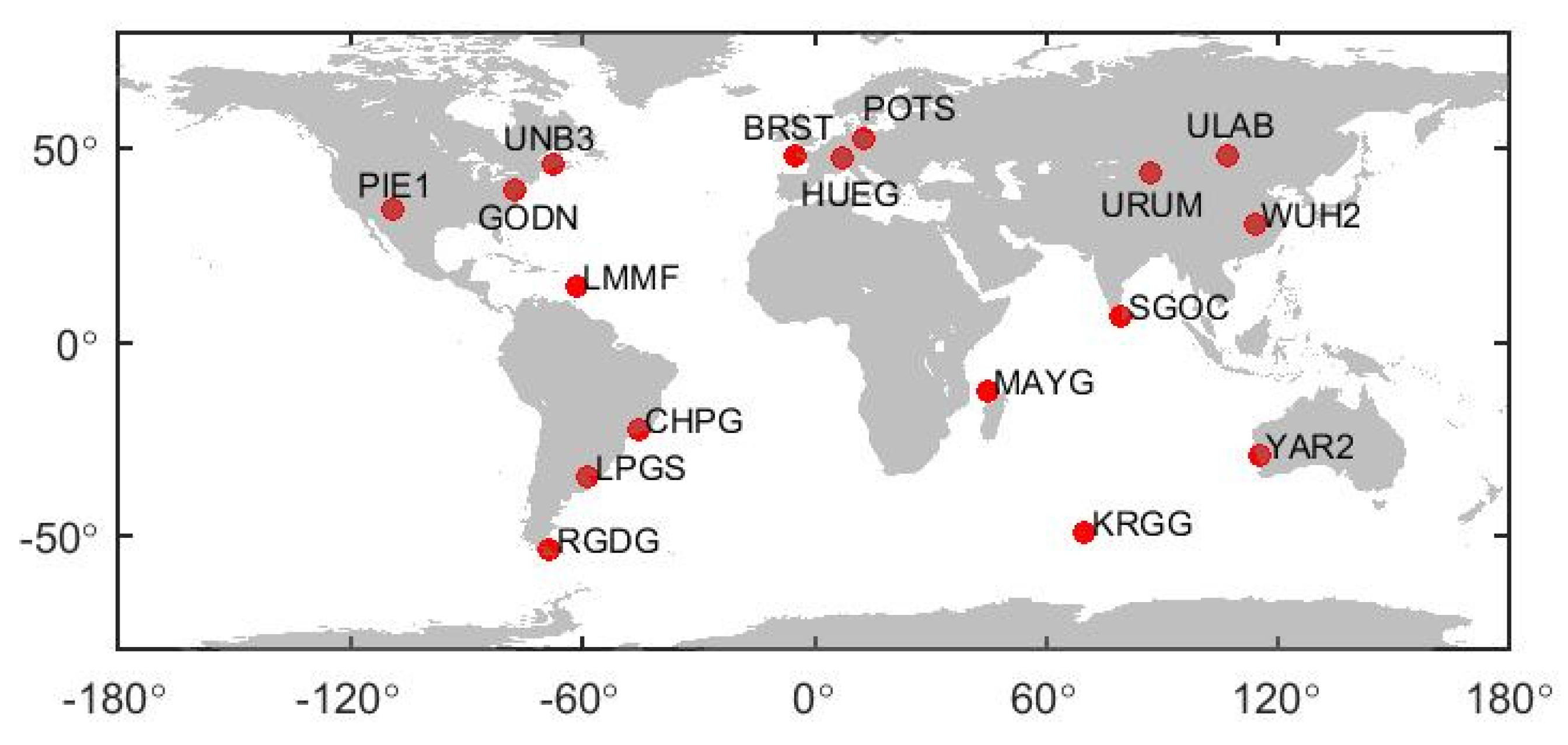
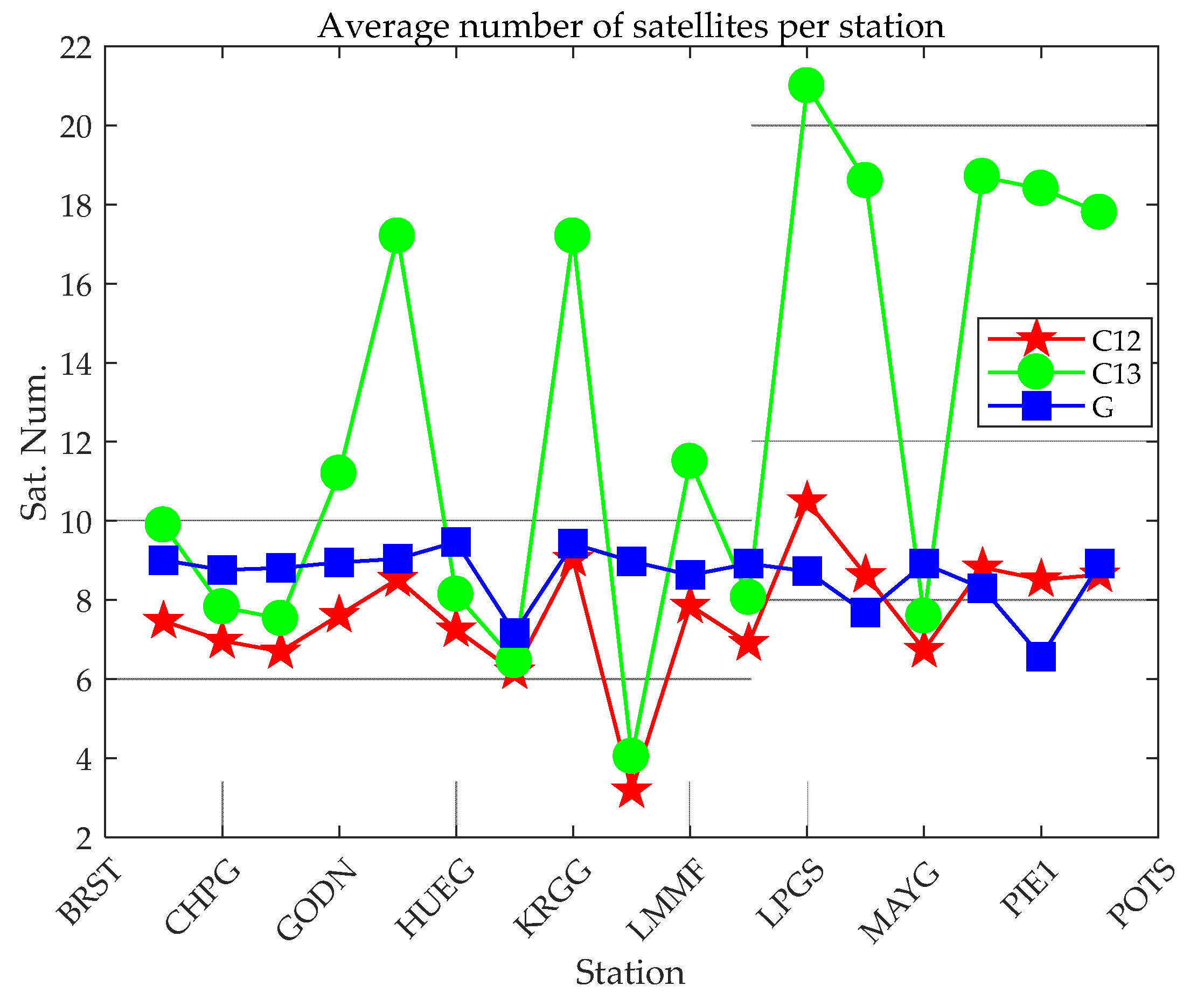
3.1. Data source and Configuration Analysis
3.2. Experimental Process
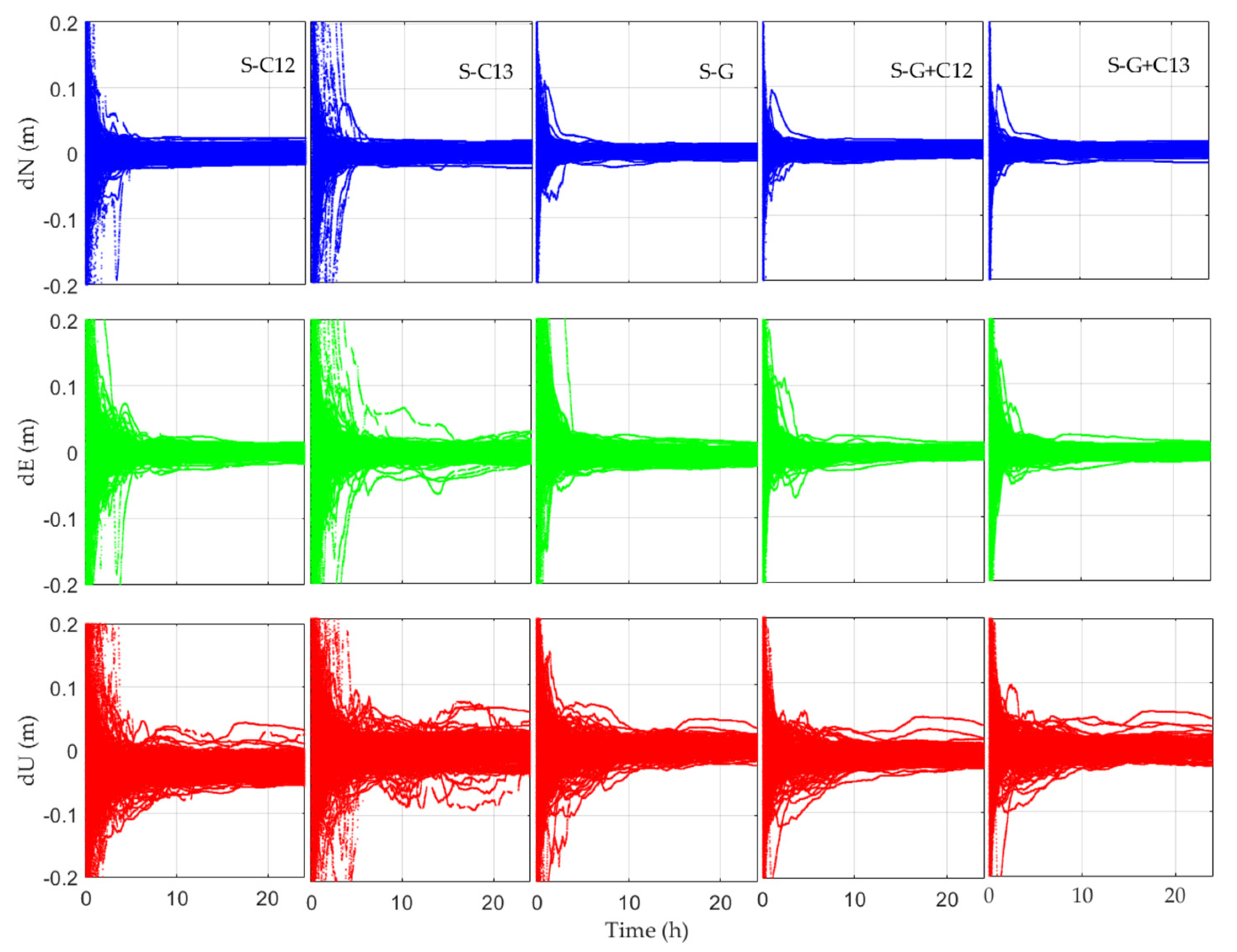
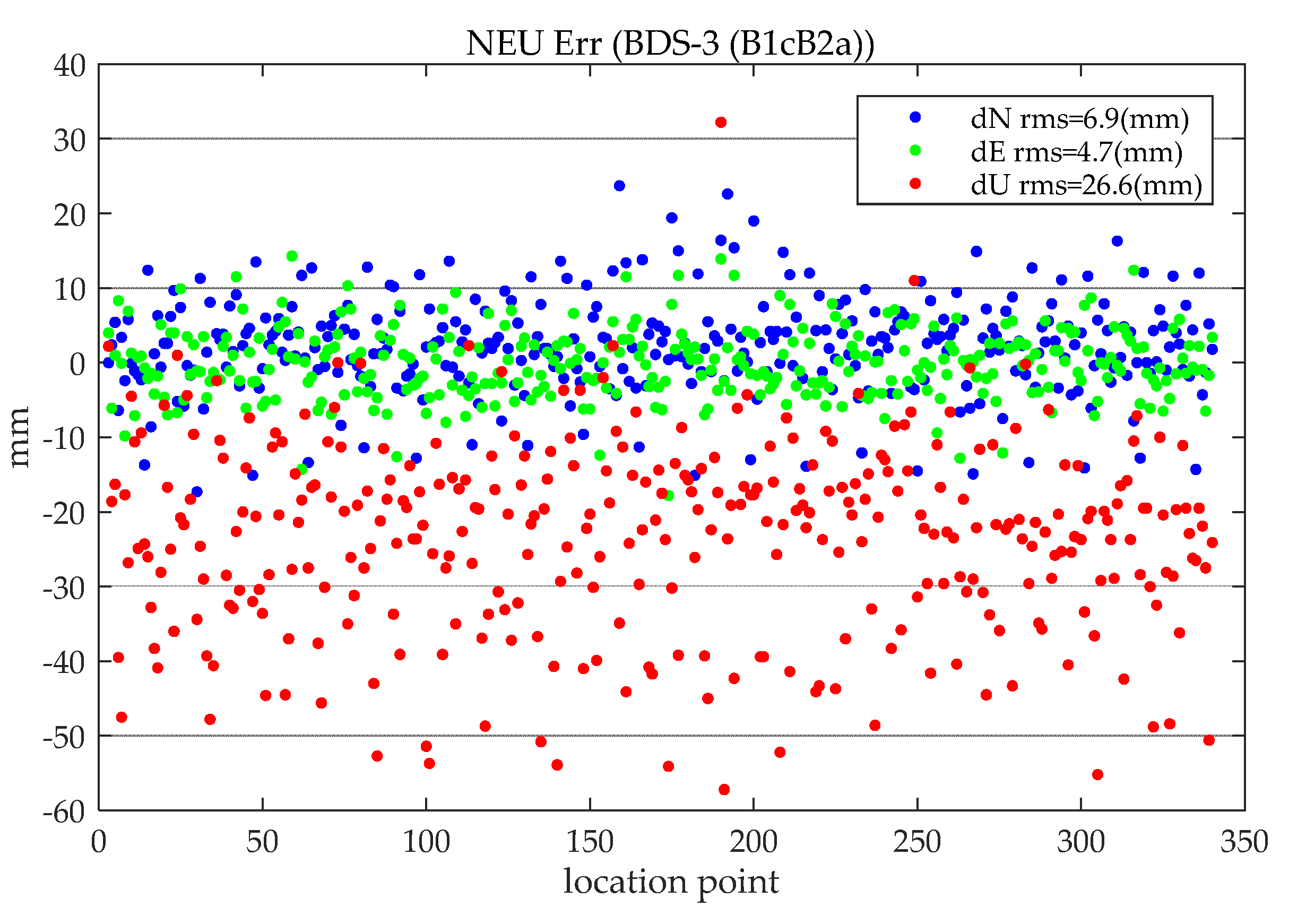
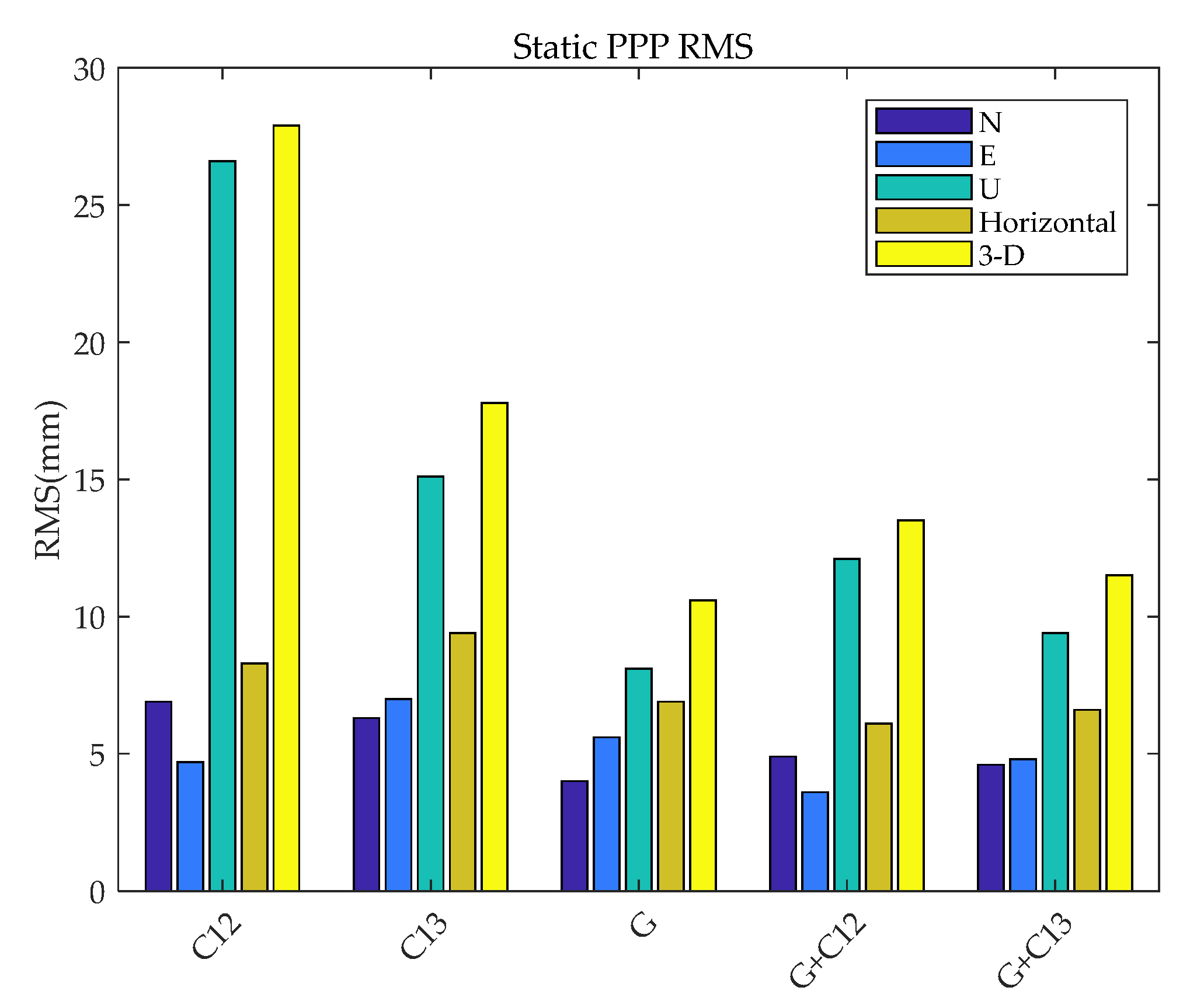
3.3. Static PPP
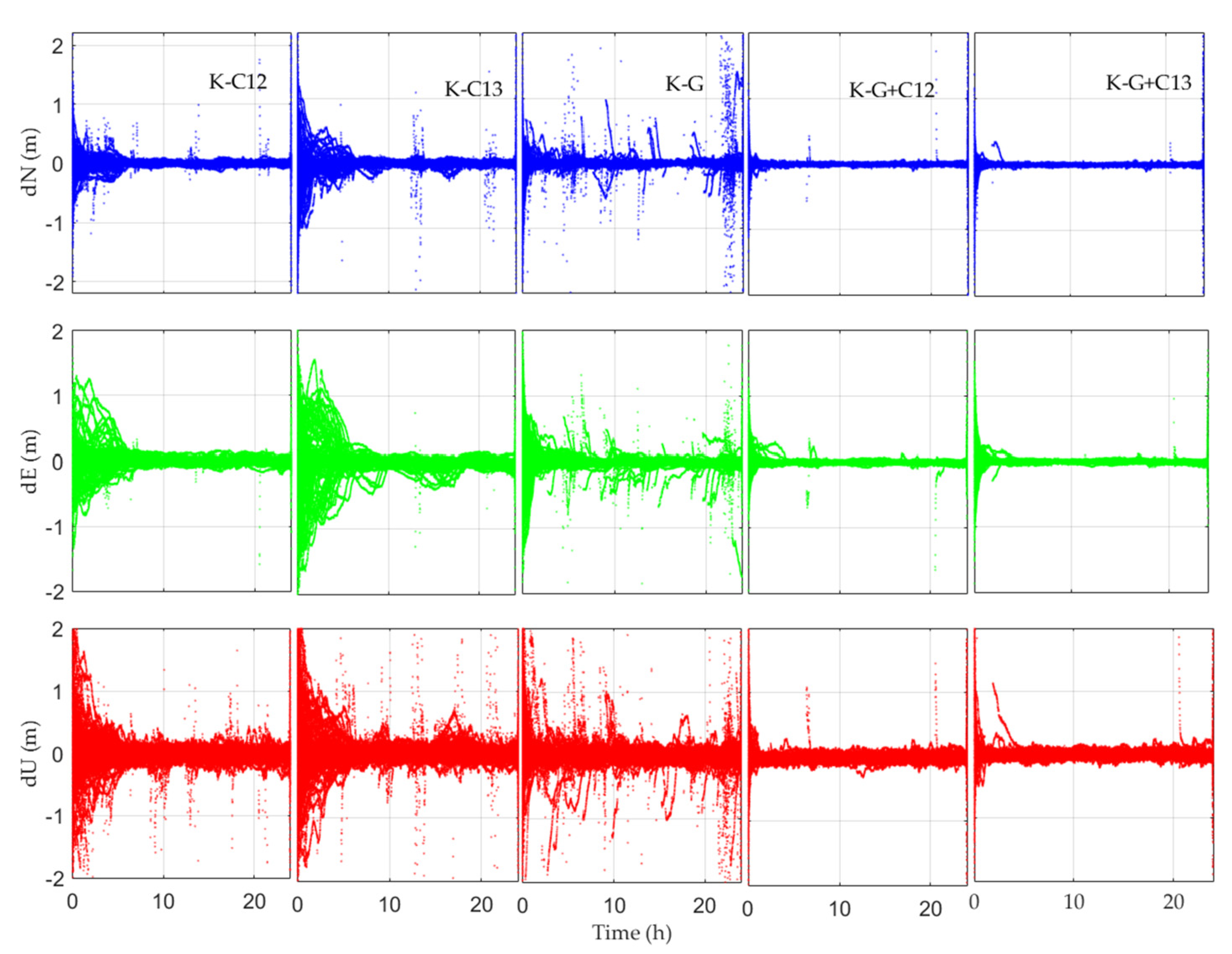
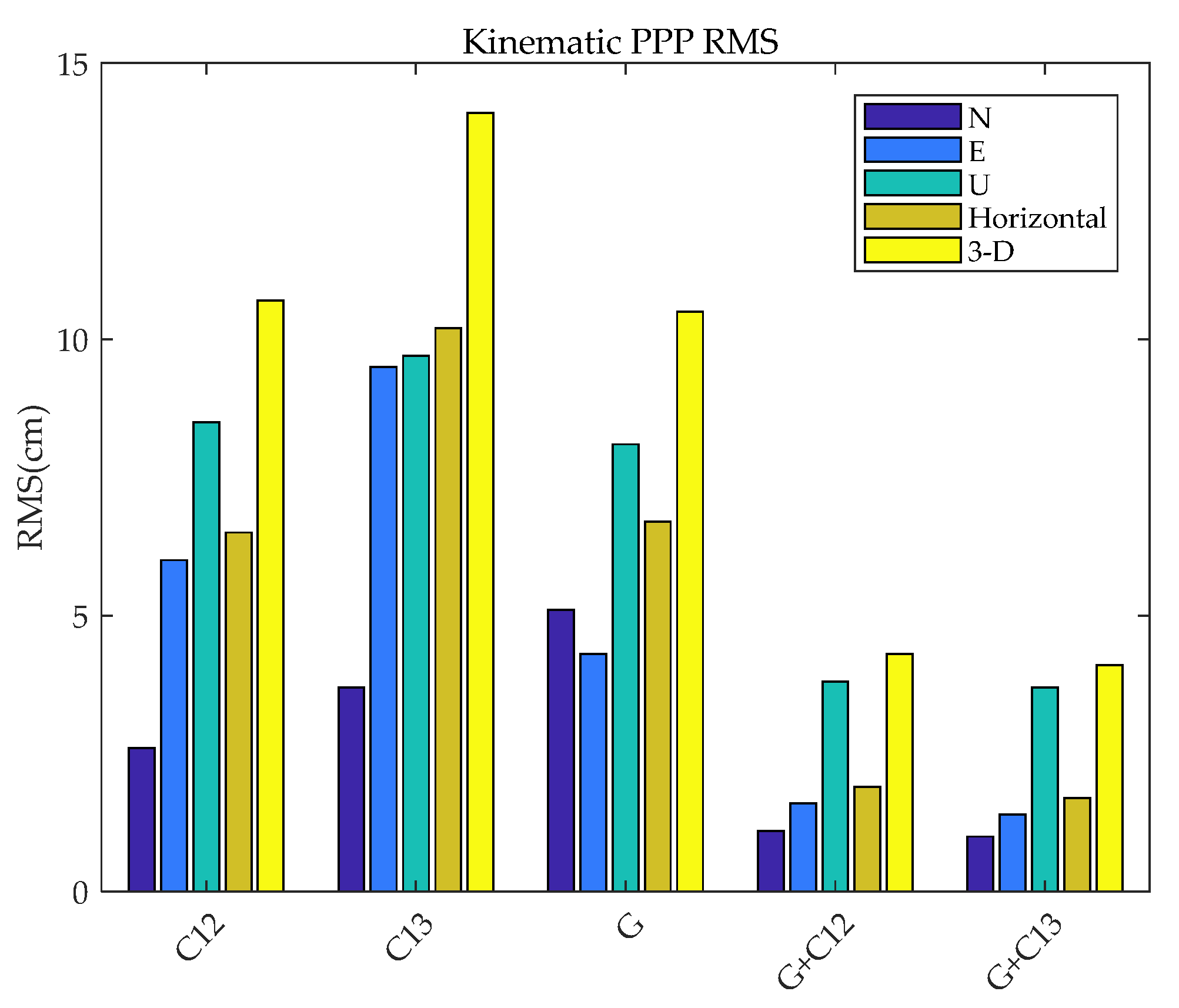
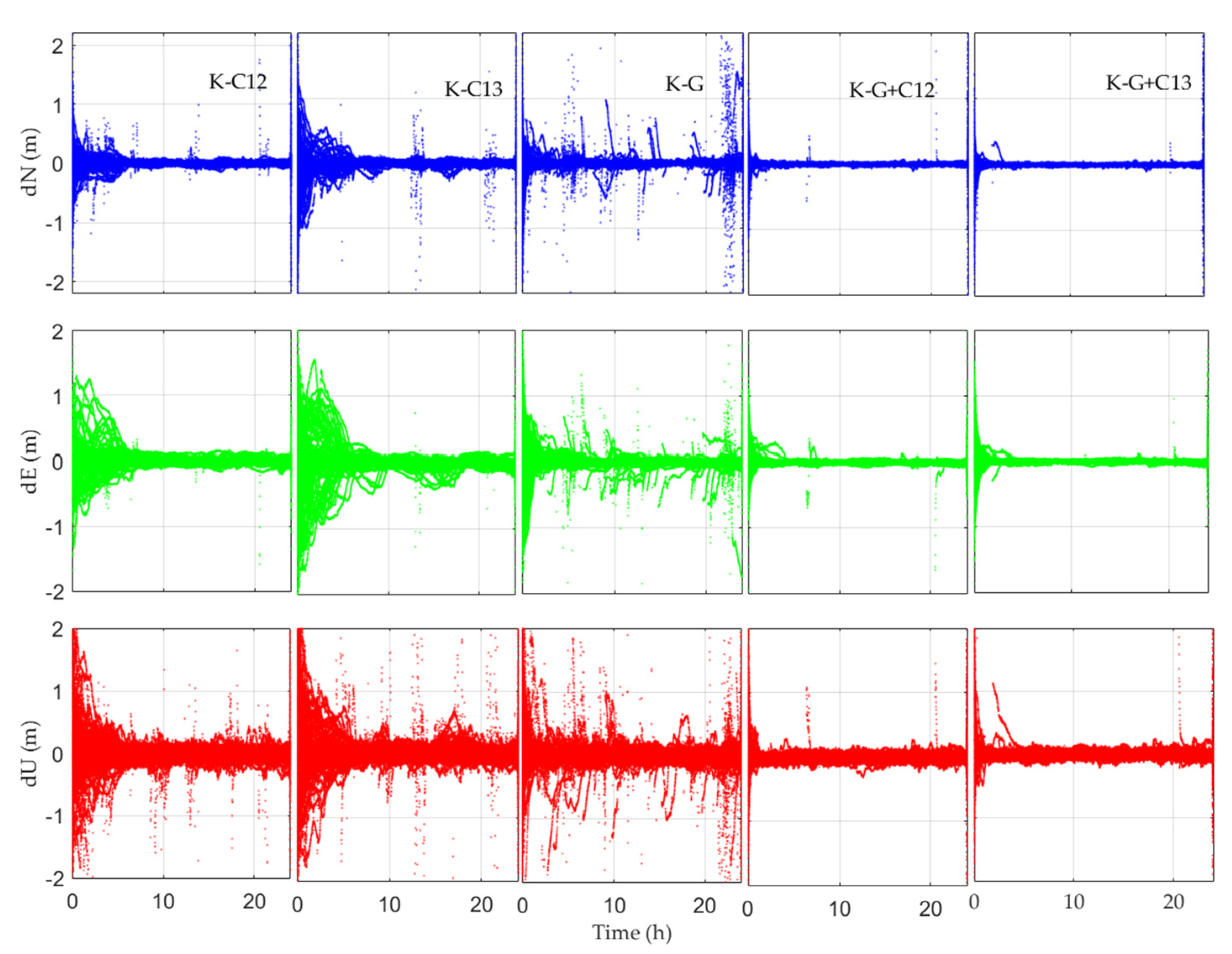
3.4. Kinematic PPP
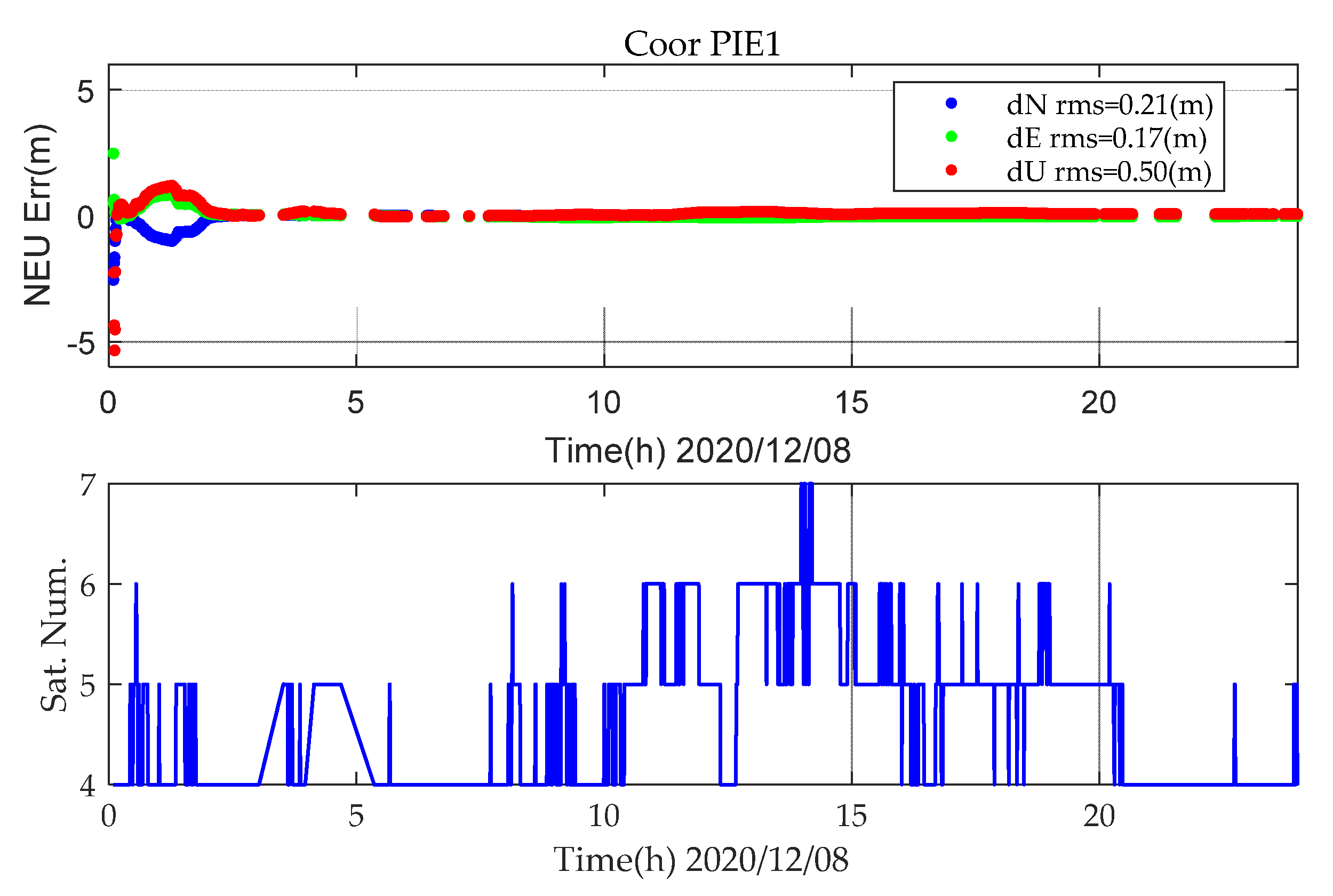
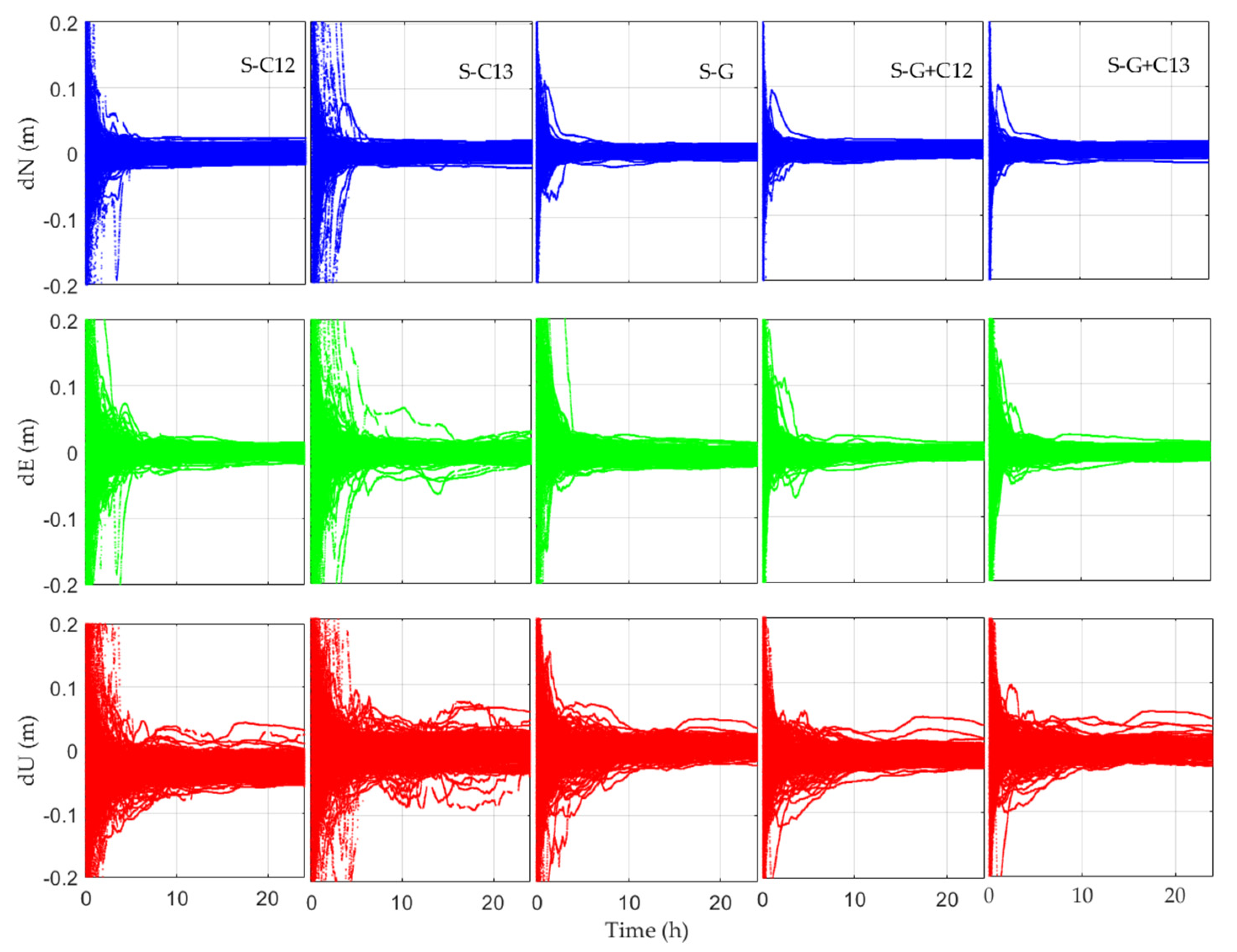
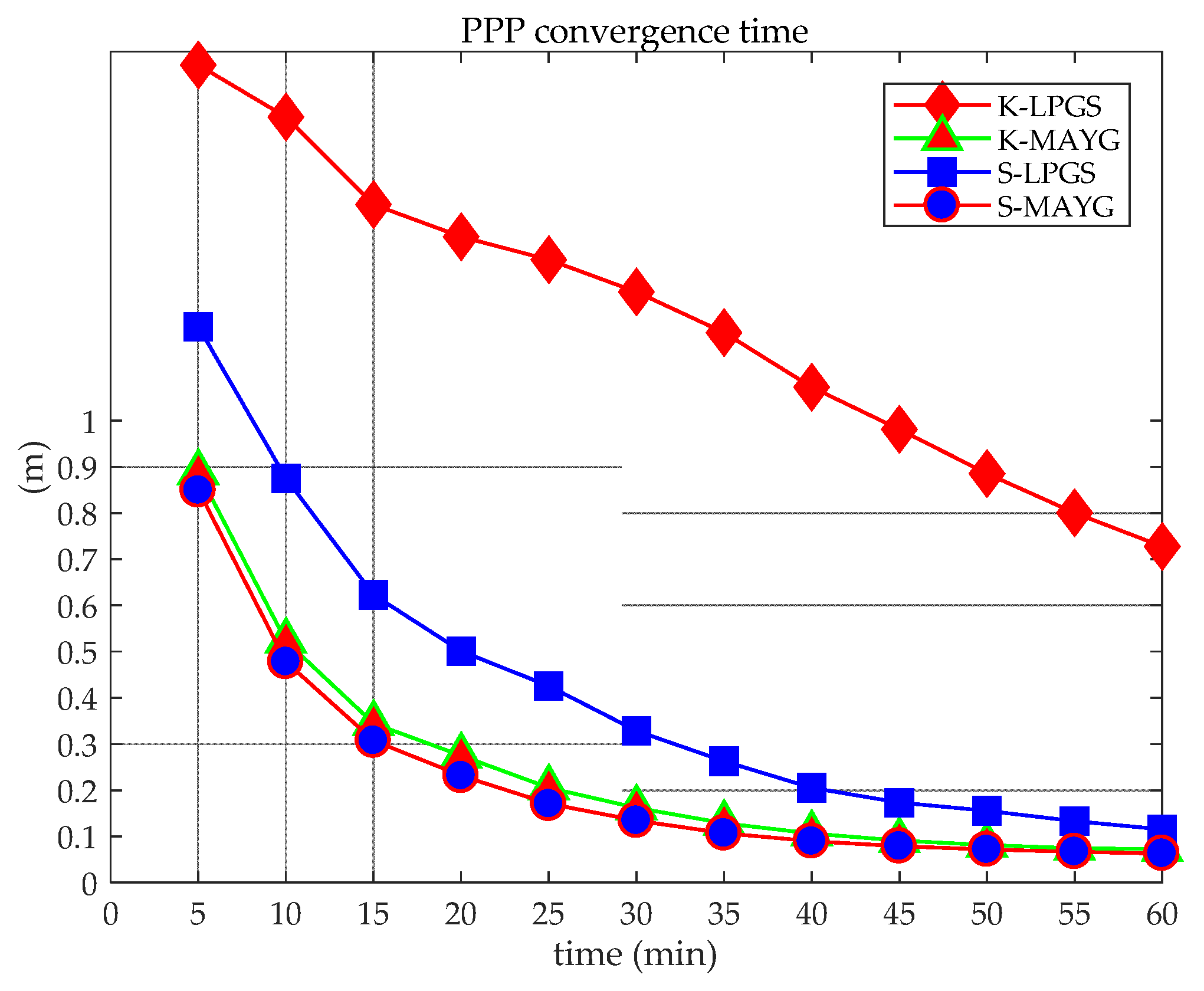
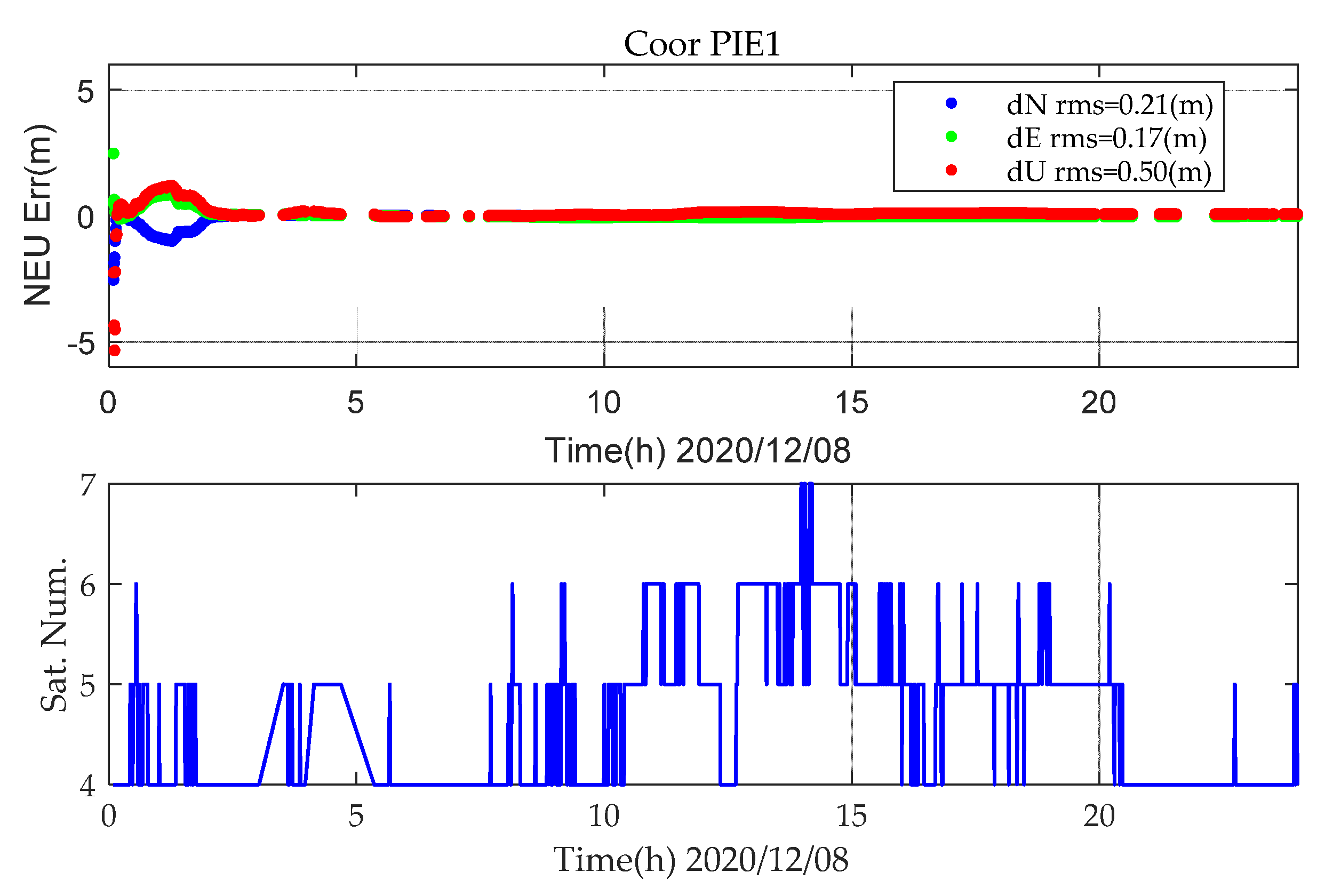
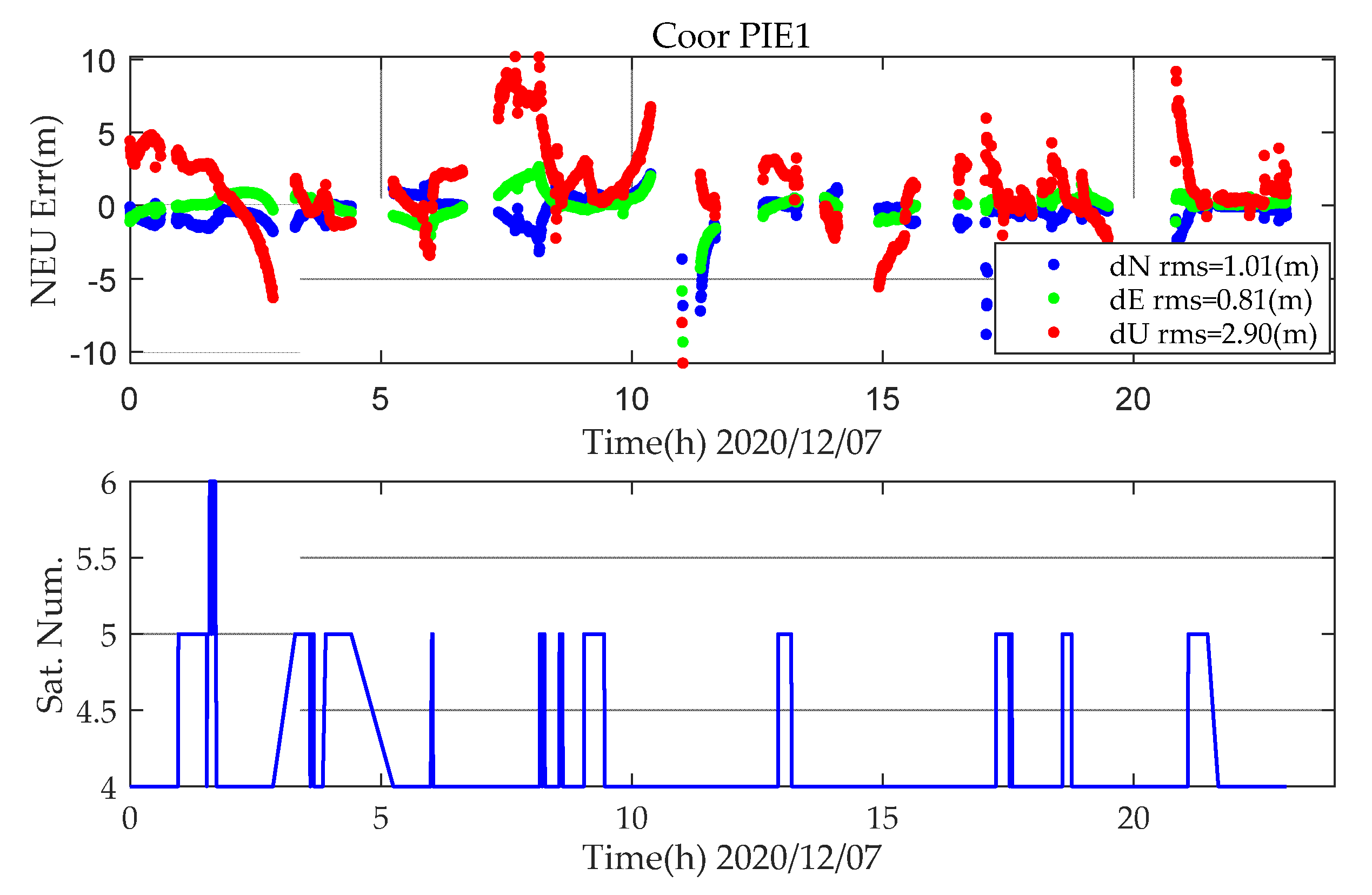
3.5. Convergency
4. Conclusions
- (1)
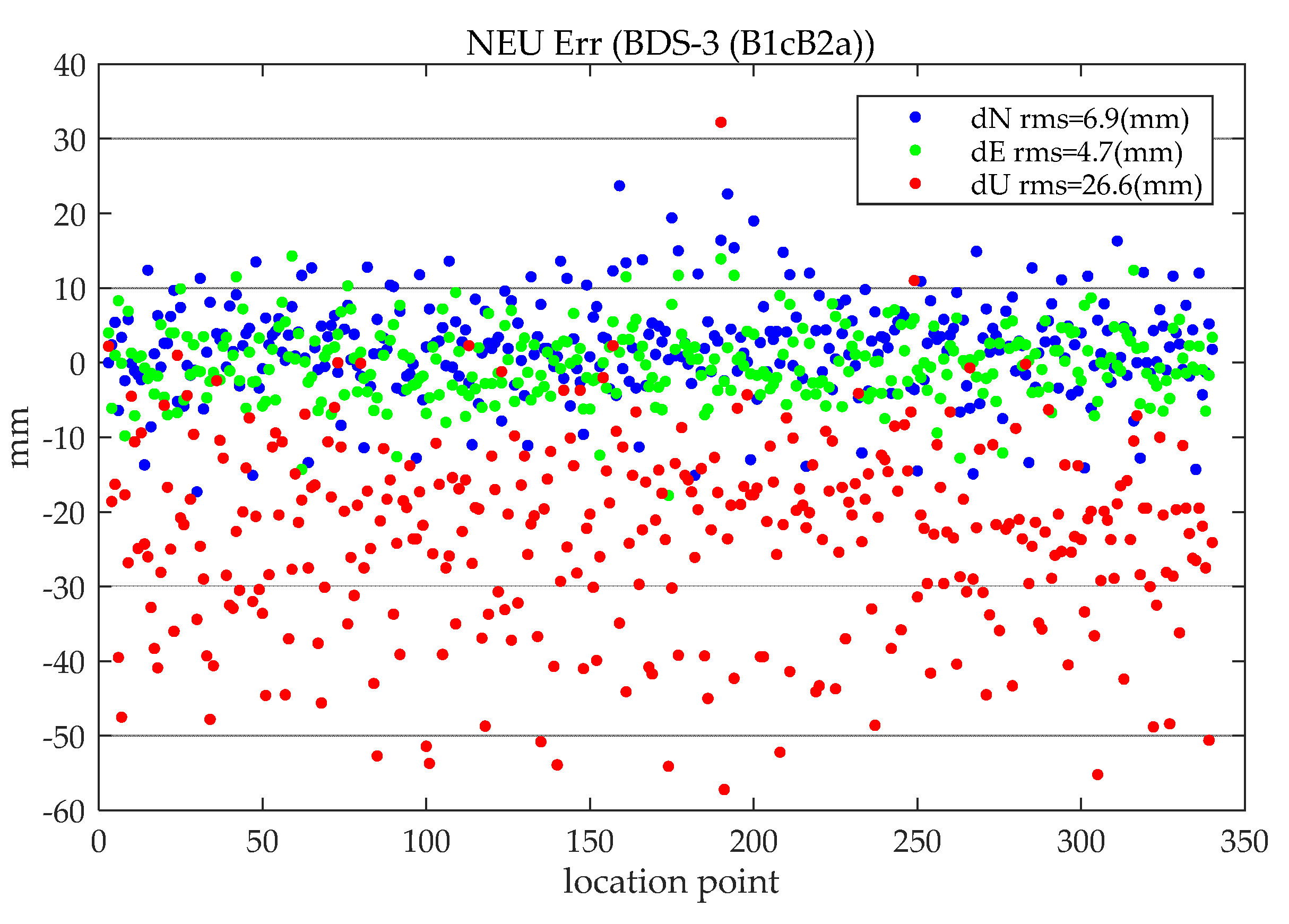
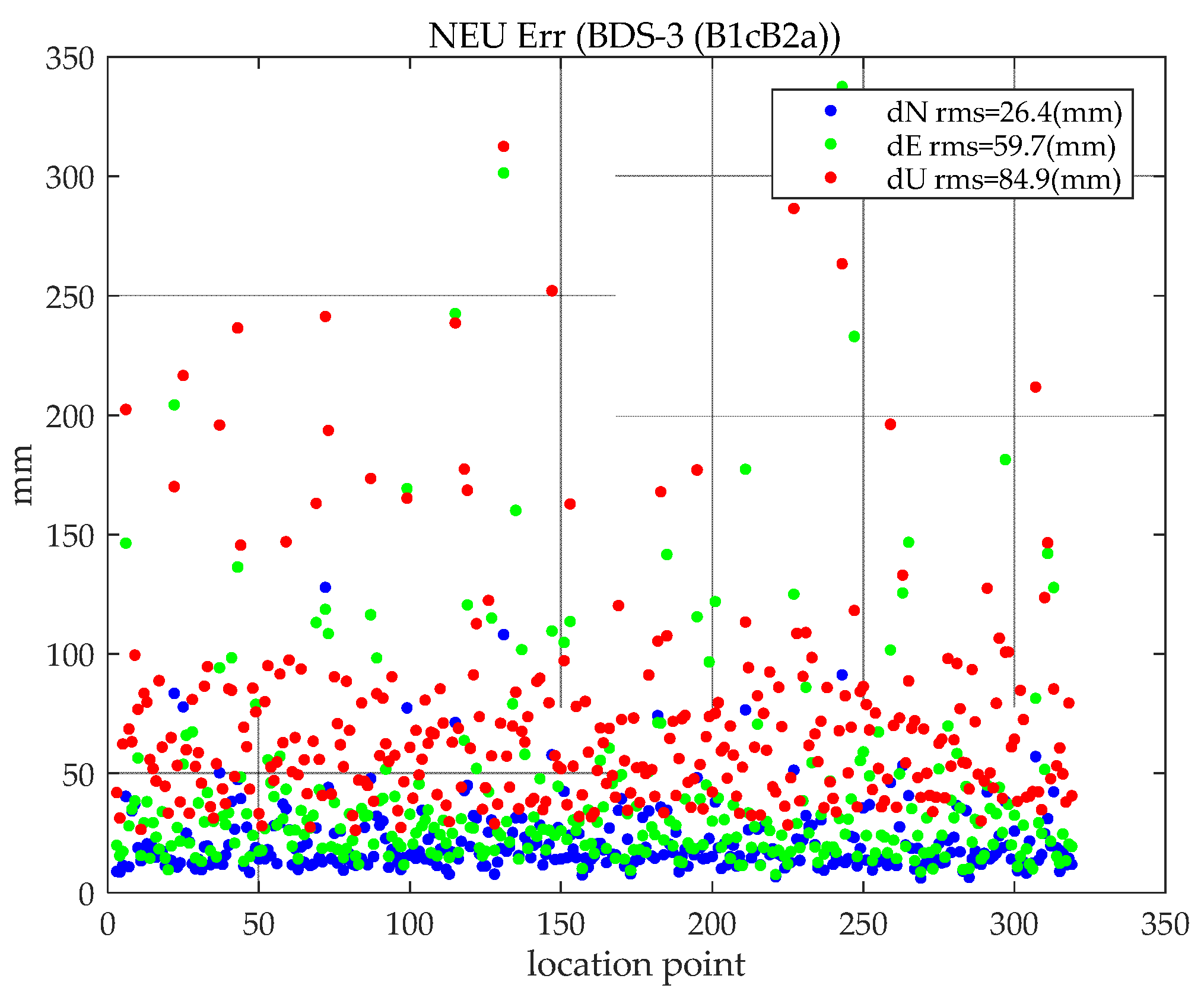
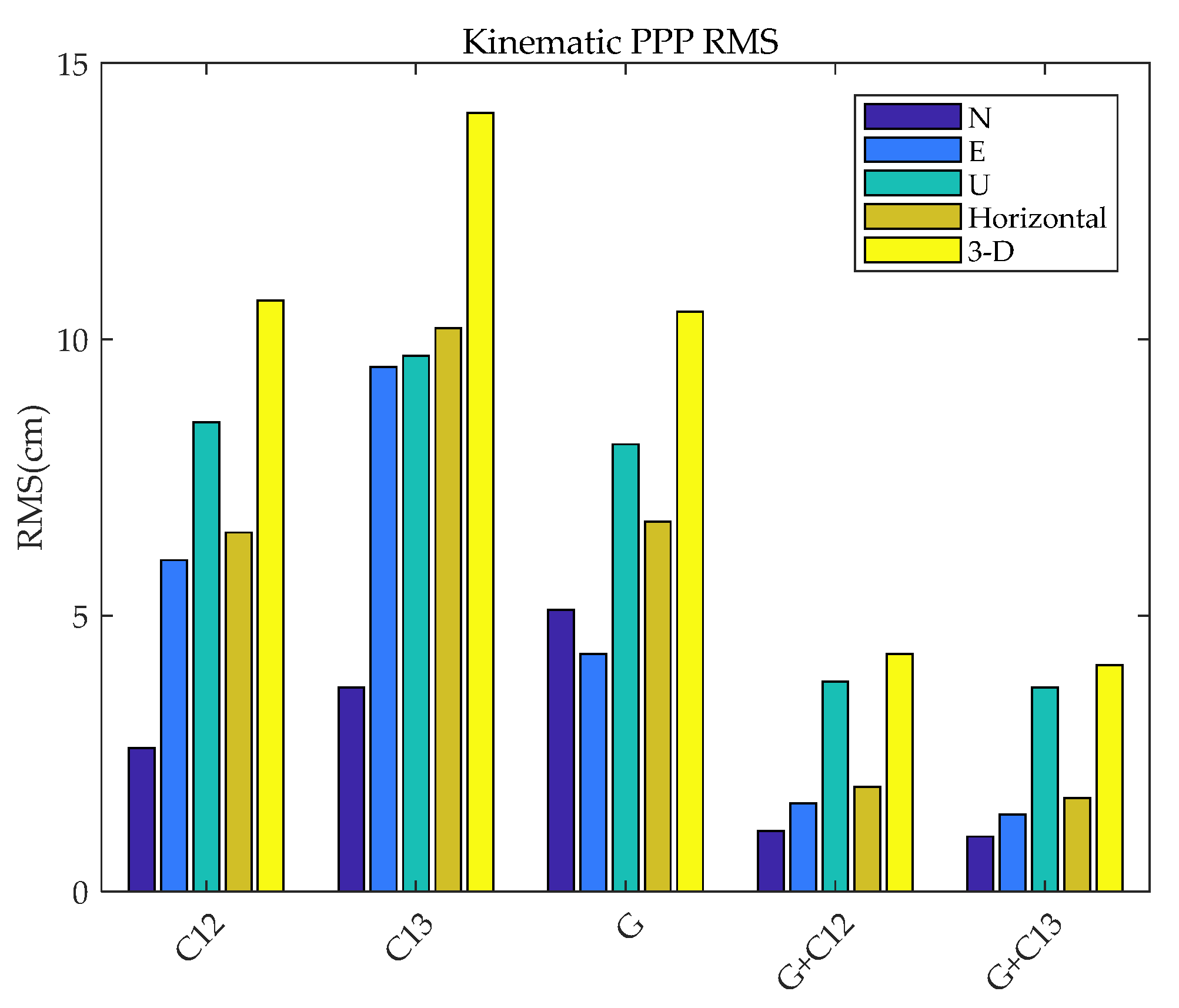
- In terms of PPP error, the results show that the RMS accuracies of BDS (B1cB2a) static PPP are 6.9 mm, 5.2 mm, and 27.2 mm, and of kinematic PPP are 2.6 cm, 6.0 cm, and 8.5 cm in the North, East and Upward directions, respectively. Whether it is static PPP or kinematic PPP, the positioning accuracy of BDS (B1CB2a) and BDS (B1IB3I) PPP are worse than that of GPS. The main reason is that the accuracy of BeiDou’s precise orbit and clock difference provided by GBM is worse than that of GPS, and the BeiDou PCO correction model uses GPS correction parameters. In static PPP, BDS (B1cB2a) and BDS (B1IB3I) have obvious inter-system bias, which is mainly reflected in the upward. Kinematic PPP has a greater impact on the number of satellites.
- (2)
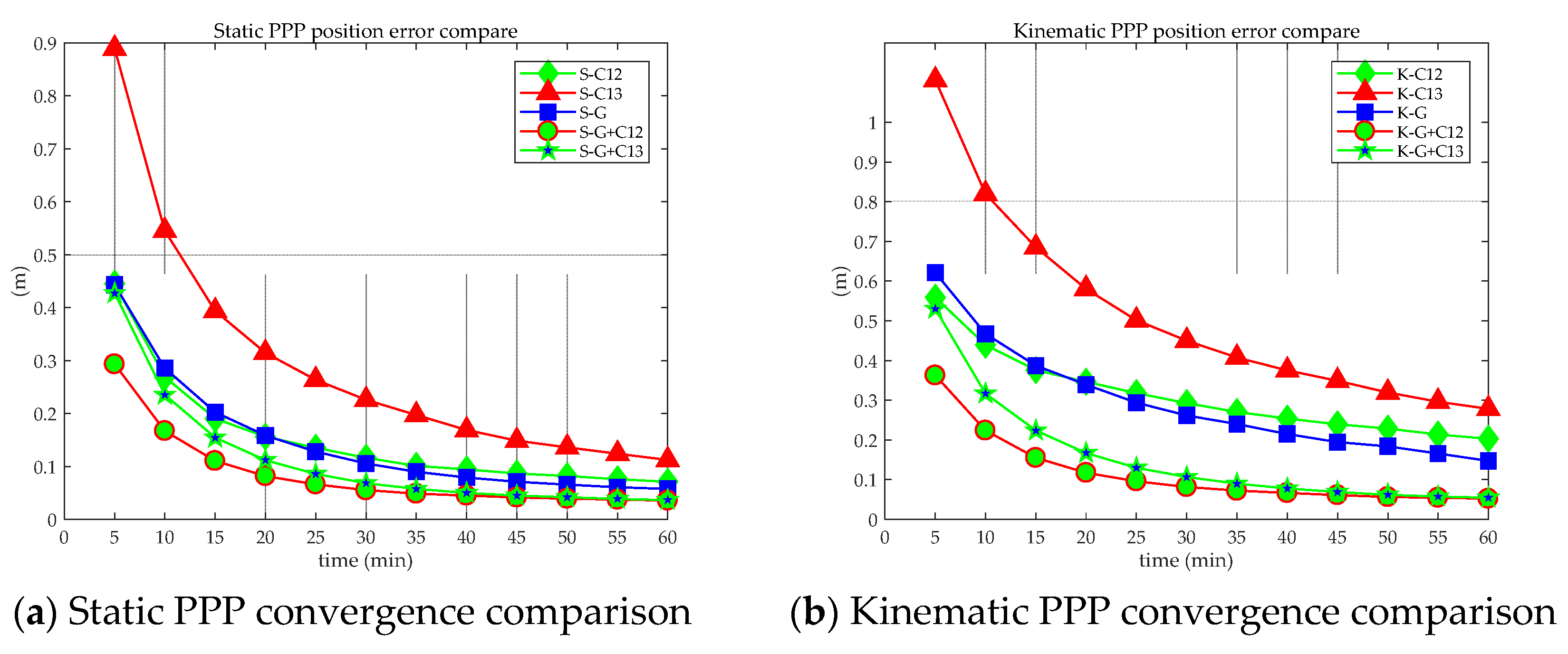
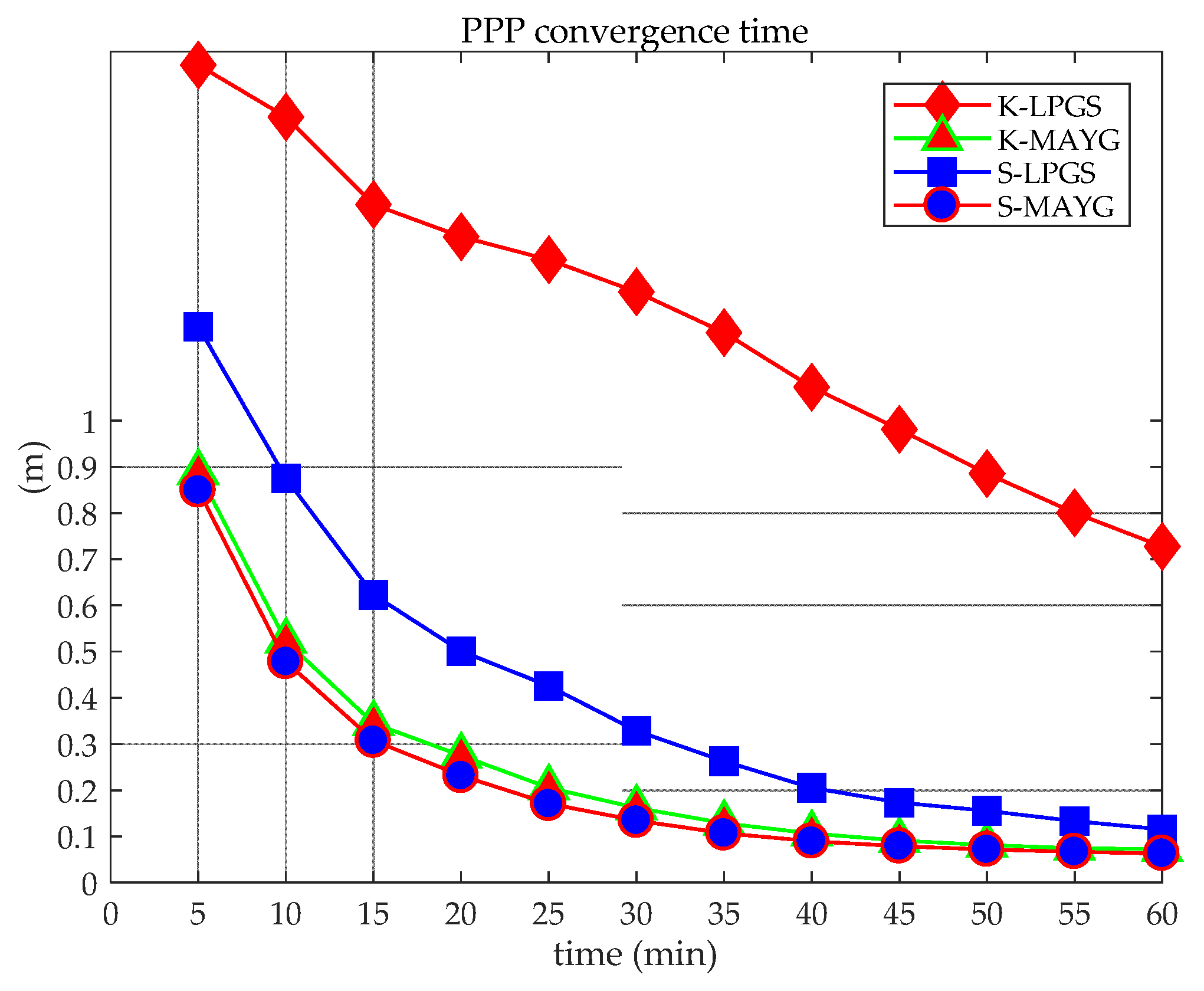
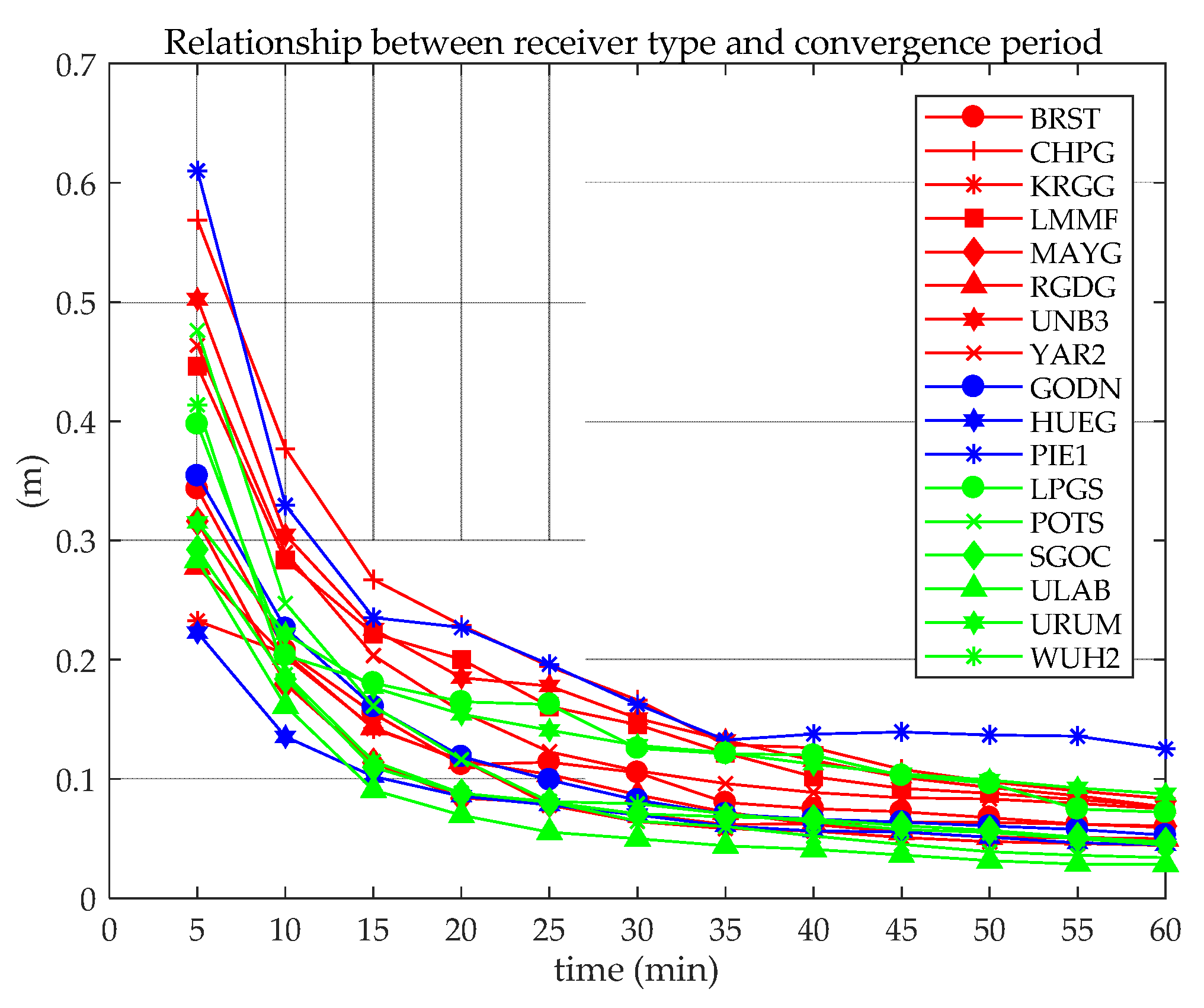
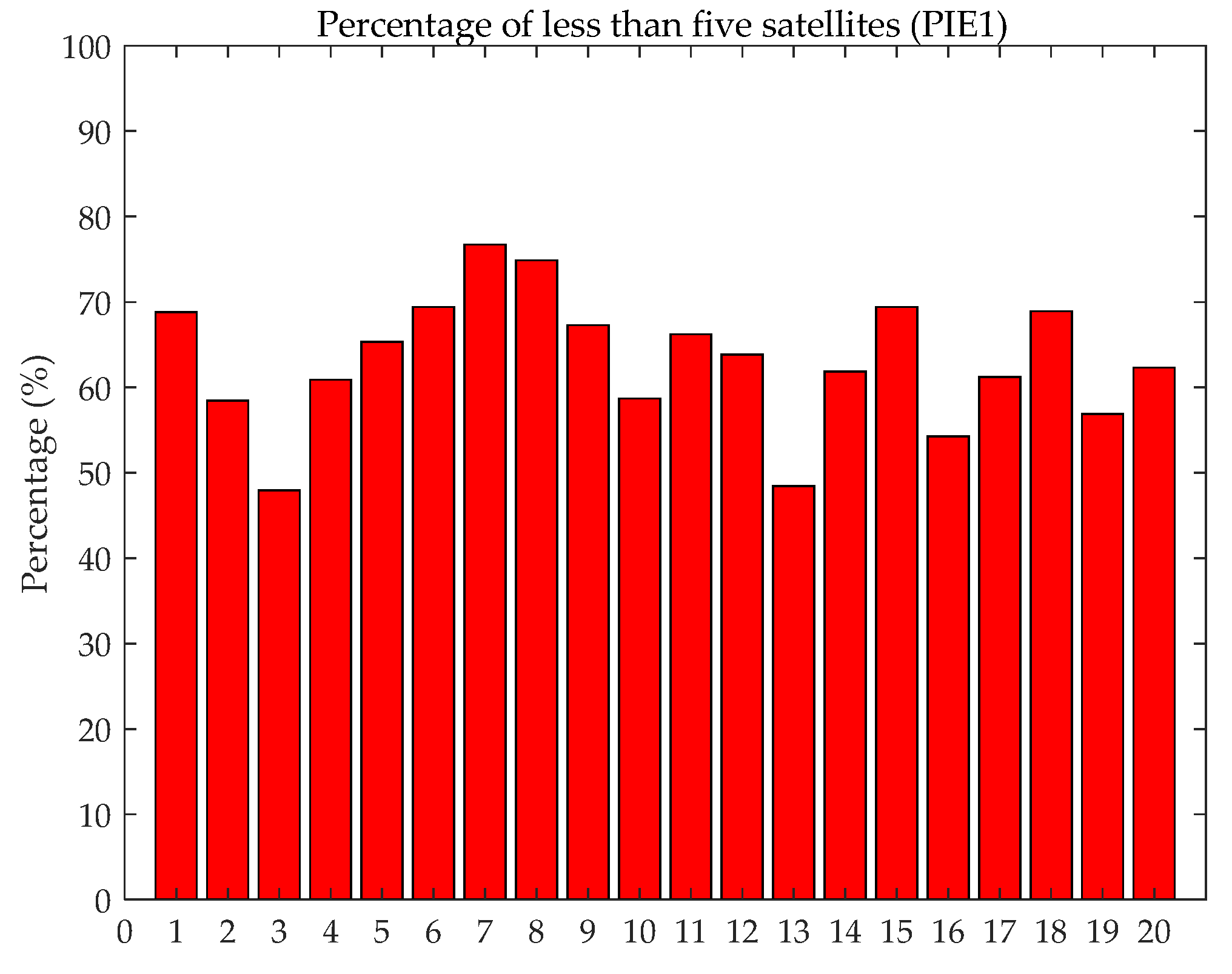
- In terms of Convergency, for static PPP or kinematic PPP, BDS + GPS has better convergence than GPS only or BDS only. The main reason is the increase in the number of satellites involved in positioning. For BDS (BICB2a) PPP, there is no obvious difference in convergence between different antenna models (high-end receiver), though the number of satellites observed has a great impact on convergence. Because the observation noise of BDS (B1IB3I) is larger than that of BDS (B1CB2a), when the number of satellites is the same, the convergence of BDS (B1IB3I) is worse than that of BDS (B1CB2a). When the number of satellites participating in static PPP is less than five satellites and there are too many epochs of the total epochs in a day, the static PPP convergence does not reach 0.1 m within 60 min.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, G.; Zhang, L. The BeiDou leads the world and its wisdom shines on the world. China Sci. Technol. Awards 2020, 8, 16–19. [Google Scholar]
- Li, R.; Zheng, S.; Wang, E.Y.; Chen, J.; Dai, L. Advances in BeiDou Navigation Satellite System (BDS) and satellite navigation augmentation technologies. Satell. Navig. 2020, 1, 1–23. [Google Scholar] [CrossRef]
- Lu, M.; Li, W.; Yao, Z.; Cui, X. Overview of BDS III new signals. Navigation 2019, 66, 19–35. [Google Scholar] [CrossRef] [Green Version]
- Sośnica, K.; Zajdel, R.; Bury, G.; Bosy, J.; Moore, M.; Masoumiet, S. Quality assessment of experimental IGS multi-GNSS com-bined orbits. GPS Solut. 2020, 24, 24–54. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment—Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.; Odijk, D. Quality analysis of a combined COMPASS/BeiDou-2 and GPS RTK positioning model. In Proceedings of the International Global Navigation Satellite Systems Society Symposium (IGNSS Symposium 2013), Outrigger Gold Coast, Australia, 16–18 July 2013. [Google Scholar]
- Gumilar, I.; Pamungkas, A.; Abidin, H.; Bramanto, B.; Adi, F. Contribution of BeiDou Positioning System for Accuracy Im-provement: A Perspective from Bandung, Indonesia. J. Aeronaut. Astronaut. Aviat. 2017, 49, 171–184. [Google Scholar]
- Nadarajah, N.; Teunissen, P.J.G.; Raziq, N. BeiDou Inter-Satellite-Type Bias Evaluation and Calibration for Mixed Receiver Attitude Determination. Sensors 2013, 13, 9435–9463. [Google Scholar] [CrossRef] [Green Version]
- Nadarajah, N.; Teunissen, P.J.G.; Sleewaegen, J.-M.; Montenbruck, O. The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. 2014, 19, 357–368. [Google Scholar] [CrossRef]
- Ouyang, C.; Shi, J.; Huang, Y.; Guo, J.; Xu, C. Evaluation of BDS-2 real-time orbit and clock corrections from four IGS analysis centers. Measurement 2021, 168, 108441. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Cai, H.; Zhang, F.; Wang, X.; Meng, Y. Precise orbit determination for BDS-3 satellites using satel-lite-ground and inter-satellite link observations. GPS Solut. 2019, 23, 23–40. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Nie, L.; Wei, C.; Jia, S.; Jiang, S. Initial assessment of BeiDou-3 global navigation satellite system: Signal quality, RTK and PPP. GPS Solut. 2019, 23, 111. [Google Scholar] [CrossRef]
- Cao, X.; Shen, F.; Zhang, S.; Li, J. Time delay bias between the second and third generation of BeiDou Navigation Satellite System and its effect on precise point positioning. Measurement 2021, 168, 108346. [Google Scholar] [CrossRef]
- Wang, Q.; Jin, S.; Yuan, L.; Hu, Y.; Chen, J.; Guo, J. Estimation and Analysis of BDS-3 Differential Code Biases from MGEX Observations. Remote Sens. 2019, 12, 68. [Google Scholar] [CrossRef] [Green Version]
- Tao, J.; Liu, J.; Hu, Z.; Zhao, Q.; Chen, G.; Ju, B. Initial Assessment of the BDS 3 PPP B2b RTS compared with the CNES RTS. GPS Solut. 2021, 25, 131. [Google Scholar] [CrossRef]
- Lu, X.; Chen, L.; Shen, N.; Wang, L.; Jiao, Z.; Chen, R. Decoding PPP Corrections from BDS B2b Signals Using a Software-Defined Receiver: An Initial Performance Evaluation. IEEE Sens. J. 2021, 21, 7871–7883. [Google Scholar] [CrossRef]
- Nie, Z.; Xu, X.; Wang, Z.; Du, J. Initial Assessment of BDS PPP-B2b Service: Precision of Orbit and Clock Corrections, and PPP Performance. Remote Sens. 2021, 13, 2050. [Google Scholar] [CrossRef]
- Cao, X.; Shen, F.; Zhang, S.; Li, J. Satellite availability and positioning performance of uncombined precise point positioning using BeiDou-2 and BeiDou-3 multi-frequency signals. Adv. Space Res. 2021, 67, 1303–1316. [Google Scholar] [CrossRef]
- Pan, L.; Li, X.; Yu, W.; Dai, W.; Kuang, C.; Chen, J.; Chen, F.; Xia, P. Performance Evaluation of Real-Time Precise Point Positioning with Both BDS-3 and BDS-2 Observations. Sensors 2020, 20, 6027. [Google Scholar] [CrossRef]
- Jiao, G.; Song, S.; Ge, Y.; Su, K.; Liu, Y. Assessment of BeiDou-3 and Multi-GNSS Precise Point Positioning Performance. Sensors 2019, 19, 2496. [Google Scholar] [CrossRef] [Green Version]
- Su, K.; Jin, S. Analysis and comparisons of the BDS/Galileo quad-frequency PPP models performances. Acta Geod. Cartogr. Sin. 2020, 49, 1189–1201. [Google Scholar]
- Wang, A.; Chen, J.; Zhang, Y.; Wang, J. Comparison of three widely used multi-GNSS real-time single-frequency precise point positioning models using the International GNSS Service real-time service. IET Radar Sonar Navig. 2020, 14, 1726–1734. [Google Scholar] [CrossRef]
- Hong, J.; Tu, R.; Zhang, R.; Fan, L.; Zhang, P.; Han, J. Contribution analysis of QZSS to single-frequency PPP of GPS/BDS/GLONASS/Galileo. Adv. Space Res. 2020, 65, 1803–1817. [Google Scholar] [CrossRef]
- Shen, P.; Cheng, F.; Lu, X.; Xiao, X.; Ge, Y. An Investigation of Precise Orbit and Clock Products for BDS-3 from Different Analysis Centers. Sensors 2021, 21, 1596. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Qian, N.; Zuo, X.; Chang, J. Performance Assessment of Positioning Based on Multi-Frequency Multi-GNSS Ob-servations: Signal Quality, PPP and Baseline Solution. IEEE Access 2020, 9, 5845–5861. [Google Scholar] [CrossRef]
- Malik, J.S. Performance Evaluation of Precise Point Positioning Using Dual Frequency Multi-GNSS Observations. Artif. Satell. 2020, 55, 150–170. [Google Scholar] [CrossRef]
- Zhu, Y.; Zheng, K.; Cui, X.; Zhang, Q.; Jia, X.; Zhang, M.; Fan, S. Preliminary analysis of the quality and positioning performance of BDS-3 global interoperable signal B1C&B2a. Adv. Space Res. 2021, 67, 2483–2490. [Google Scholar] [CrossRef]
- Jin, S.; Su, K. PPP models and performances from single- to quad-frequency BDS observations. Satell. Navig. 2020, 1, 1–13. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Q.; Tu, R.; Liu, Z. A Kind of Single-frequency Precise Point Positioning Algorithm Based on the Raw Obser-vations. Acta Geod. Cartogr. Sin. 2015, 44, 19–25. [Google Scholar]
- Ayhan, M.E.; Almuslmani, B. Positional accuracy and convergence time assessment of GPS precise point positioning in static mode. Arab. J. Geosci. 2021, 14, 1–12. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Du, Z.; Chai, H.; Xiang, M.; Yin, X.; Liu, C. Unified ambiguity resolution method based on three PPP Models. Acta Geod. Cartogr. Sin. 2020, 49, 824–832. [Google Scholar]
- Zhu, H.; Li, J.; Yu, Z.; Zhang, K.; Xu, A. The algorithm of multi-frequency carrier phase integer ambiguity resolution with GPS/BDS between long range network RTK reference stations. Acta Geod. Cartogr. Sin. 2020, 49, 300–311. [Google Scholar]
- Zhang, X.; Hu, J.; Ren, X. New progress of PPP/PPP-RTK and positioning performance comparison of BDS/GNSS PPP. Acta Geod. Cartogr. Sin. 2020, 49, 1084–1100. [Google Scholar]
- Zhou, F. Theory and Methodology of Multi-GNSS Undifferenced and Uncombined Precise Point Positioning. Ph.D. Thesis, East China Normal University, Shanghai, China, 2018. [Google Scholar]
- Guan, X.; Chai, H.; Xiao, G.; Liu, C.; Shi, M. Application of baseline constraint Kalman filter to BeiDou precise point positioning. Surv. Rev. 2021, 53, 55–69. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 1–8. [Google Scholar] [CrossRef]
- He, Y.; Li, H.; Zhou, J. Comparatively analysis of PPP results for products of different IGS analysis centers. J. Navigat. Position 2020, 8, 38–42. [Google Scholar]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichtenet, S.M. Effects of antenna orientation on GPS carrier phase. Astrodynamics 1991, 1992, 1647–1660. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Models | |
|---|---|---|
| Observation | Observations | GPS: L1 & L2, BDS: B1I & B3I, BDS: B1c & B2a |
| Elevation cutoff | 10° | |
| Observation weighting | Weight determination of the elevation angle | |
| Standard deviation of observation noise | Phase 1 cm, pseudo range 1 m | |
| Sampling rate | 30 s | |
| Error correction | Satellite orbit | GBM precise orbit |
| Satellite clock | GBM precise clock | |
| Phase wind-up | Model corrected [46] | |
| Phase center offset | igs14.atx | |
| Earth deformation | IERS conventions | |
| Ionospheric correction | Ionosphere-free combination | |
| Tropospheric correction | GPT2_5W + SAAS + VMF1 | |
| Parameter estimation | Ambiguity | Piecewise constant, float solution |
| Troposphere | Random walk | |
| Station coordinates | Static: constant, kinematic: random walk (Set to 100 m) | |
| Clock correction | White noise |
| Static PPP | Kinematic PPP | |||
|---|---|---|---|---|
| C12 | C13 | C12 | C13 | G |
| 337PIE1 341PIE1 | 337PIE1 340PIE1 341PIE1 343PIE1 352PIE1 353PIE1 | allPIE1 337LPGS 340LMMF 341UNB3 | allPIE1 338LPGS 340CHPG 341UNB3 344CHPG 347CHPG 355GODN | 336ULAB |
| 339SGOC | ||||
| 341WUH2 | ||||
| 342ULAB | ||||
| 342URUM | ||||
| 344URUM | ||||
| 345ULAB | ||||
| 345WUH2 | ||||
| 346WUH2 | ||||
| 347URUM | ||||
| 349WUH2 | ||||
| 351WUH2 | ||||
| 355URUM | ||||
| S-C12 | S-C13 | S-G | S-G+C12 | S-G+C13 | ||
|---|---|---|---|---|---|---|
| RMS (mm) | North | 6.9 | 6.3 | 4.0 | 4.9 | 4.6 |
| East | 4.7 | 7.0 | 5.6 | 3.6 | 4.8 | |
| Upward | 26.6 | 15.1 | 8.1 | 12.1 | 9.4 | |
| Horizontal | 8.3 | 9.4 | 6.9 | 6.1 | 6.6 | |
| 3-D | 27.9 | 17.8 | 10.6 | 13.5 | 11.5 | |
| AVG (mm) | North | 2.1 | 1.2 | 0.9 | 1.5 | 1.0 |
| East | −0.2 | −0.7 | −2.2 | −0.9 | −1.2 | |
| Upward | −23.2 | 2.0 | 2.5 | −8.6 | 0.7 |
| Station Name | Receiver Model | Antenna Model |
|---|---|---|
| BRST | TRIMBLE ALLOY | TRM57971.00-NONE |
| CHPG | TRIMBLE ALLOY | TRM59800.00-NONE |
| GODN | JAVAD TRE_3 DELTA | TPSCR.G3-SCIS |
| HUEG | JAVAD TRE_3 DELTA | LEIAR25.R4-LEIT |
| KRGG | TRIMBLE ALLOY | LEIAR25.R4-LEIT |
| LMMF | TRIMBLE ALLOY | TRM57971.00-NONE |
| LPGS | JAVAD TRE_3 | JAVRINGANT_G5T-NONE |
| MAYG | TRIMBLE ALLOY | TRM59800.00-NONE |
| PIE1 | JAVAD TRE_3 DELTA | ASH701945E_M-NONE |
| POTS | JAVAD TRE_3 | JAVRINGANT_G5T-NONE |
| RGDG | TRIMBLE ALLOY | TRM59800.00-SCIS |
| SGOC | JAVAD TRE_3 | JAVRINGANT_G5T-NONE |
| ULAB | JAVAD TRE_3 | JAVRINGANT_G5T-NONE |
| UNB3 | TRIMBLE ALLOY | TRM57971.00-NONE |
| URUM | JAVAD TRE_3 | JAVRINGANT_G5T-NONE |
| WUH2 | JAVAD TRE_3 | JAVRINGANT_G5T-NONE |
| YAR2 | TRIMBLE ALLOY | AOAD/M_T-NONE |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, E.; Yang, T.; Wang, Z.; Zhang, Y.; Guo, J.; Shu, W.; Qu, P. Performance Evaluation of Precise Point Positioning for BeiDou-3 B1c/B2a Signals in the Global Range. Sensors 2021, 21, 5780. https://doi.org/10.3390/s21175780
Wang E, Yang T, Wang Z, Zhang Y, Guo J, Shu W, Qu P. Performance Evaluation of Precise Point Positioning for BeiDou-3 B1c/B2a Signals in the Global Range. Sensors. 2021; 21(17):5780. https://doi.org/10.3390/s21175780
Chicago/Turabian StyleWang, Ershen, Tao Yang, Zhi Wang, Yize Zhang, Jing Guo, Wansen Shu, and Pingping Qu. 2021. "Performance Evaluation of Precise Point Positioning for BeiDou-3 B1c/B2a Signals in the Global Range" Sensors 21, no. 17: 5780. https://doi.org/10.3390/s21175780
APA StyleWang, E., Yang, T., Wang, Z., Zhang, Y., Guo, J., Shu, W., & Qu, P. (2021). Performance Evaluation of Precise Point Positioning for BeiDou-3 B1c/B2a Signals in the Global Range. Sensors, 21(17), 5780. https://doi.org/10.3390/s21175780