
An Extensive Literature Review on Underwater Image Colour Correction



Abstract
:1. Introduction
1.1. Optical Properties of Water
1.2. Image Haze
1.3. Recent Advancements and the Work of This Paper
- Underwater Image Colour Correction
- Underwater Image Colour Restoration
- Underwater Image Colour Enhancement
- Underwater Image Colour Correction using AI
- Image Colour Restoration with Neural Networks
- Image Colour Correction using water physical properties
- Image Colour Correction in deer waters
- Colour Correction with ROV/AUV
- Image Formation Model and Colour Correction
2. Various Contributions in Recent Years
2.1. Image Enhancement Methods
2.2. Image Restoration Methods
2.3. Artificial Intelligence Methods
3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Klemen, I. Underwater Image-Based 3D Reconstruction with Quality Estimation; University of Girona: Girona, Spain, 2021. [Google Scholar]
- Corchs, S.; Schettini, R. Underwater image processing: State of the art of restoration and image enhancement methods. EURASIP J. Adv. Signal Process. 2010, 2010, 746052. [Google Scholar] [CrossRef] [Green Version]
- Chambah, M.; Semani, D.; Renouf, A.; Courtellemont, P.; Rizzi, A. Underwater color constancy: Enhancement of automatic live fish recognition. Color Imaging IX Process. Hardcopy Appl. 2003, 5293, 157. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, K.; Salam, R.A.; Osman, A.; Talib, A.Z. Underwater Image Enhancement Using an Integrated Colour Model. IAENG Int. J. Comput. Sci. 2007, 32, 239–244. [Google Scholar]
- Petit, F.; Capelle-Laizé, A.S.; Carré, P. Underwater image enhancement by attenuation inversion with quaternions. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 1177–1180. [Google Scholar] [CrossRef]
- Stephane, B.; Isabelle, Q.; Luc, J.; Jean-Phillipe, M. Automatic Underwater Image Pre-Processing. In CMM’06; CCSD: Brest, France, 2006. [Google Scholar]
- Hou, W.; Gray, D.J.; Weidemann, A.D.; Fournier, G.R.; Forand, J.L. Automated underwater image restoration and retrieval of related optical properties. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 1889–1892. [Google Scholar] [CrossRef]
- Hou, W.; Weidemann, A.D.; Gray, D.J.; Fournier, G.R. Imagery-derived modulation transfer function and its applications for underwater imaging. In Proceedings of the Applications of Digital Image Processing XXX, San Diego, CA, USA, 28–30 August 2007; Volume 6696, p. 669622. [Google Scholar] [CrossRef]
- Hou, W.; Gray, D.J.; Weidemann, A.D.; Arnone, R.A. Comparison and validation of point spread models for imaging in natural waters. Opt. Express 2008, 16, 9958. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schechner, Y.Y.; Karpel, N. Recovery of underwater visibility and structure by polarization analysis. IEEE J. Ocean. Eng. 2005, 30, 570–587. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Song, W.; Fortino, G.; Qi, L.Z.; Zhang, W.; Liotta, A. An Experimental-Based Review of Image Enhancement and Image Restoration Methods for Underwater Imaging. IEEE Access 2019, 7, 140233–140251. [Google Scholar] [CrossRef]
- Bekerman, Y.; Avidan, S.; Treibitz, T. Unveiling Optical Properties in Underwater Images. In Proceedings of the 2020 IEEE International Conference on Computational Photography (ICCP), Saint Louis, MO, USA, 24–26 April 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Morel, A. Optical properties of pure water and pure sea water. In Optical Aspects of Oceanography; LaFond, E.C., Jerlov, N.G., Steemaxn Nielsen, E., Eds.; Academic Press: London, UK; New York, NY, USA, 1974; pp. 1–24. [Google Scholar]
- Menna, F.; Agrafiotis, P.; Georgopoulos, A. State of the art and applications in archaeological underwater 3D recording and mapping. J. Cult. Herit. 2018, 33, 231–248. [Google Scholar] [CrossRef]
- Jerlov, N.G.; Koczy, F.F.; Schooner, A. Photographic Measurements of Daylight in Deep Water; Reports of the Swedish Deep-Sea Expedition, 1947–1948; v. 3; Physics and Chemistry; Elanders Boktr.: Gothenburg, Sweeden, 1951. [Google Scholar]
- Solonenko, M.G.; Mobley, C.D. Inherent optical properties of Jerlov water types. Appl. Opt. 2015, 54, 5392. [Google Scholar] [CrossRef]
- Akkaynak, D.; Treibitz, T.; Shlesinger, T.; Tamir, R.; Loya, Y.; Iluz, D. What is the space of attenuation coefficients in underwater computer vision? In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 568–577. [Google Scholar] [CrossRef]
- Blasinski, H.; Breneman IV, J.; Farrell, J. A Model for Estimating Spectral Properties of Water From RGB Images. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 610–614. [Google Scholar]
- Lebart, K.; Smith, C.; Trucco, E.; Lane, D.M. Automatic indexing of underwater survey video: Algorithm and benchmarking method. IEEE J. Ocean. Eng. 2003, 28, 673–686. [Google Scholar] [CrossRef]
- Yuh, J.; West, M. Underwater Robotics; Taylor & Francis: Oxfordshire, UK, 2001; Volume 15, ISBN 1568553013. [Google Scholar]
- Chiang, J.Y.; Chen, Y.C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2012, 21, 1756–1769. [Google Scholar] [CrossRef]
- Chao, L.; Wang, M. Removal of water scattering. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–19 April 2010; Volume 2, pp. 35–39. [Google Scholar] [CrossRef]
- Ancuti, C.; Ancuti, C.O.; Haber, T.; Bekaert, P. Enhancing underwater images and videos by fusion. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 81–88. [Google Scholar] [CrossRef]
- Bianco, G.; Muzzupappa, M.; Bruno, F.; Garcia, R.; Neumann, L. A new color correction method for underwater imaging. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 25–32. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Luo, K.; Dang, J.; Li, D. Underwater image restoration using color correction and non-local prior. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, Scotland, 19–22 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, H.; Chau, L.P. Underwater image color correction based on surface reflectance statistics. In Proceedings of the 2015 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Hong Kong, China, 16–19 December 2015; pp. 996–999. [Google Scholar] [CrossRef]
- Bianco, G.; Neumann, L. A fast enhancing method for non-uniformly illuminated underwater images. In Proceedings of the OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Nurtantio Andono, P.; Eddy Purnama, I.K.; Hariadi, M. Underwater image enhancement using adaptive filtering for enhanced sift-based image matching. J. Theor. Appl. Inf. Technol. 2013, 52, 273–280. [Google Scholar]
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Neumann, L.; Garcia, R. Color transfer for underwater dehazing and depth estimation. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 12–20 September 2017; pp. 695–699. [Google Scholar] [CrossRef]
- Zhao, X.; Jin, T.; Qu, S. Deriving inherent optical properties from background color and underwater image enhancement. Ocean Eng. 2015, 94, 163–172. [Google Scholar] [CrossRef]
- Peng, Y.T.; Zhao, X.; Cosman, P.C. Single underwater image enhancement using depth estimation based on blurriness. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 2–6. [Google Scholar]
- Bryson, M.; Johnson-Roberson, M.; Pizarro, O.; Williams, S.B. Colour-consistent structure-from-motion models using underwater imagery. Robot. Sci. Syst. 2013, 8, 33–40. [Google Scholar] [CrossRef]
- Gavin, H.P. The Levenburg-Marqurdt Algorithm For Nonlinear Least Squares Curve-Fitting Problems; Duke University: Durham, NC, USA, 2019. [Google Scholar]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic Red-Channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar] [CrossRef]
- Bryson, M.; Johnson-Roberson, M.; Pizarro, O.; Williams, S.B. True Color Correction of Autonomous Underwater Vehicle Imagery. J. Field Robot. 2016, 33, 853–874. [Google Scholar] [CrossRef]
- Akkaynak, D.; Treibitz, T. A Revised Underwater Image Formation Model. In Proceedings of the 2018 IEEE Conference on computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6723–6732. [Google Scholar] [CrossRef]
- Akkaynak, D.; Treibitz, T. Sea-THRU: A method for removing water from underwater images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1682–1691. [Google Scholar] [CrossRef]
- Roznere, M.; Li, A.Q. Real-time Model-based Image Color Correction for Underwater Robots. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Venetian Macao, Macau, 3–8 November 2019; pp. 7191–7196. [Google Scholar]
- Berman, D.; Levy, D.; Avidan, S.; Treibitz, T. Underwater single image color restoration using haze-lines and a new quantitative dataset. arXiv 2018, arXiv:1811.01343. [Google Scholar] [CrossRef] [Green Version]
- Park, E.; Sim, J.-Y. Underwater Image Restoration Using Geodesic Color Distance and Complete Image Formation Model. IEEE Access 2020, 8, 157918–157930. [Google Scholar] [CrossRef]
- Torres-Méndez, L.A.; Dudek, G. Color Correction of Underwater Images for Aquatic Robot Inspection. In Proceedings of the International Workshop on Energy Minimization Methods in Computer Vision and Pattern Recognition, St. Augustine, FL, USA, 9–11 November 2005; pp. 60–73. [Google Scholar] [CrossRef]
- Ponce-Hinestroza, A.N.; Torres-Méndez, L.A.; Drews, P. A statistical learning approach for underwater color restoration with adaptive training based on visual attention. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–21 September 2016. [Google Scholar]
- Maldonado-Ramırez, A.; Torres-Méndez, L.; Martınez-Garcıa, E. Robust detection and tracking of regions of interest for autonomous underwater robotic exploration. In Proceedings of the 6th International Conference on Advanced Cognitive Technologies and Applications, Venice, Italy, 25–29 May 2014; pp. 165–171. [Google Scholar]
- Ponce-Hinestroza, A.N.; Torres-Méndez, L.A.; Drews, P. Using a MRF-BP model with color adaptive training for underwater color restoration. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancún, México, 4–8 December 2016; pp. 787–792. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Guo, C. Emerging from Water: Underwater Image Color Correction Based on Weakly Supervised Color Transfer. IEEE Signal Process. Lett. 2018, 25, 323–327. [Google Scholar] [CrossRef] [Green Version]
- Hashisho, Y.; Albadawi, M.; Krause, T.; von Lukas, U.F. Underwater Color Restoration Using U-Net Denoising Autoencoder. In Proceedings of the 2019 11th International Symposium on Image and Signal Processing and Analysis (ISPA), Dubrovnik, Croatia, 23–25 September 2019; pp. 117–122. [Google Scholar]
- Fabbri, C.; Islam, M.J.; Sattar, J. Enhancing Underwater Imagery Using Generative Adversarial Networks. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7159–7165. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation Using Cycle-Consistent Adversarial Networks. In Proceedings of the 2017 IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2242–2251. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Li, N.; Zhang, S.; Yu, Z.; Zheng, H.; Zheng, B. Multi-scale adversarial network for underwater image restoration. Opt. Laser Technol. 2019, 110, 105–113. [Google Scholar] [CrossRef]
- Li, J.; Skinner, K.A.; Eustice, R.M.; Johnson-Roberson, M. WaterGAN: Unsupervised generative network to enable real-time color correction of monocular underwater images. IEEE Robot. Autom. Lett. 2018, 3, 387–394. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Zhou, Y.; Han, F.; Zhu, H.; Zheng, Y. UWGAN: Underwater GAN for real-world underwater color restoration and dehazing. arXiv 2019, arXiv:1912.10269. [Google Scholar]
- Yang, M.; Hu, K.; Du, Y.; Wei, Z.; Sheng, Z.; Hu, J. Underwater image enhancement based on conditional generative adversarial network. Signal Process. Image Commun. 2020, 81, 115723. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Z.; Chen, B.M. MLFcGAN: Multi-level feature fusion based conditional GAN for underwater image color correction. arXiv 2020, arXiv:2002.05333. [Google Scholar] [CrossRef] [Green Version]
- Gulrajani, I.; Ahmed, F.; Arjovsky, M.; Dumoulin, V.; Courville, A. Improved training of wasserstein GANs. arXiv 2017, arXiv:1704.00028. [Google Scholar]
- Dudhane, A.; Hambarde, P.; Patil, P.; Murala, S. Deep Underwater Image Restoration and beyond. IEEE Signal Process. Lett. 2020, 27, 675–679. [Google Scholar] [CrossRef]
- Bai, L.; Zhang, W.; Pan, X.; Zhao, C. Underwater Image Enhancement Based on Global and Local Equalization of Histogram and Dual-Image Multi-Scale Fusion. IEEE Access 2020, 8, 128973–128990. [Google Scholar] [CrossRef]
- Li, C.; Anwar, S.; Hou, J.; Cong, R.; Guo, C.; Ren, W. Underwater Image Enhancement via Medium Transmission-Guided Multi-Color Space Embedding. IEEE Trans. Image Process. 2021, 30, 4985–5000. [Google Scholar] [CrossRef]
- Li, C.Y.; Cavallaro, A. Cast-Gan: Learning to Remove Colour Cast from Underwater Images. In Proceedings of the 2020 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 October 2020; pp. 1083–1087. [Google Scholar] [CrossRef]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An Underwater Image Enhancement Benchmark Dataset and beyond. IEEE Trans. Image Process. 2020, 29, 4376–4389. [Google Scholar] [CrossRef] [Green Version]
- Aydin, T.O.; Mantiuk, R.; Myszkowski, K.; Seidel, H.P. Dynamic range independent image quality assessment. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Description | Characteristics and Dataset | Image Quality Evaluation | Quantitative Metrics |
|---|---|---|---|---|
| Image Enhancement Methods | ||||
| Ancuti et al. [23] | “A framework based on fusion that combines many filters to enhance UW images based on a single input. A robust white balancing technique specialized for UW scenes” | “White balancing, and fusion of several applications such as image compositing multispectral video enhancement defogging and HDR imaging of UW Degraded Images” | “Comparison with other methods and evaluation based on feature point matching quality” | “Image Quality Metric as proposed by [61]. The metric estimates the Loss of visible contrast, Amplification of invisible features and Contrast reversal” |
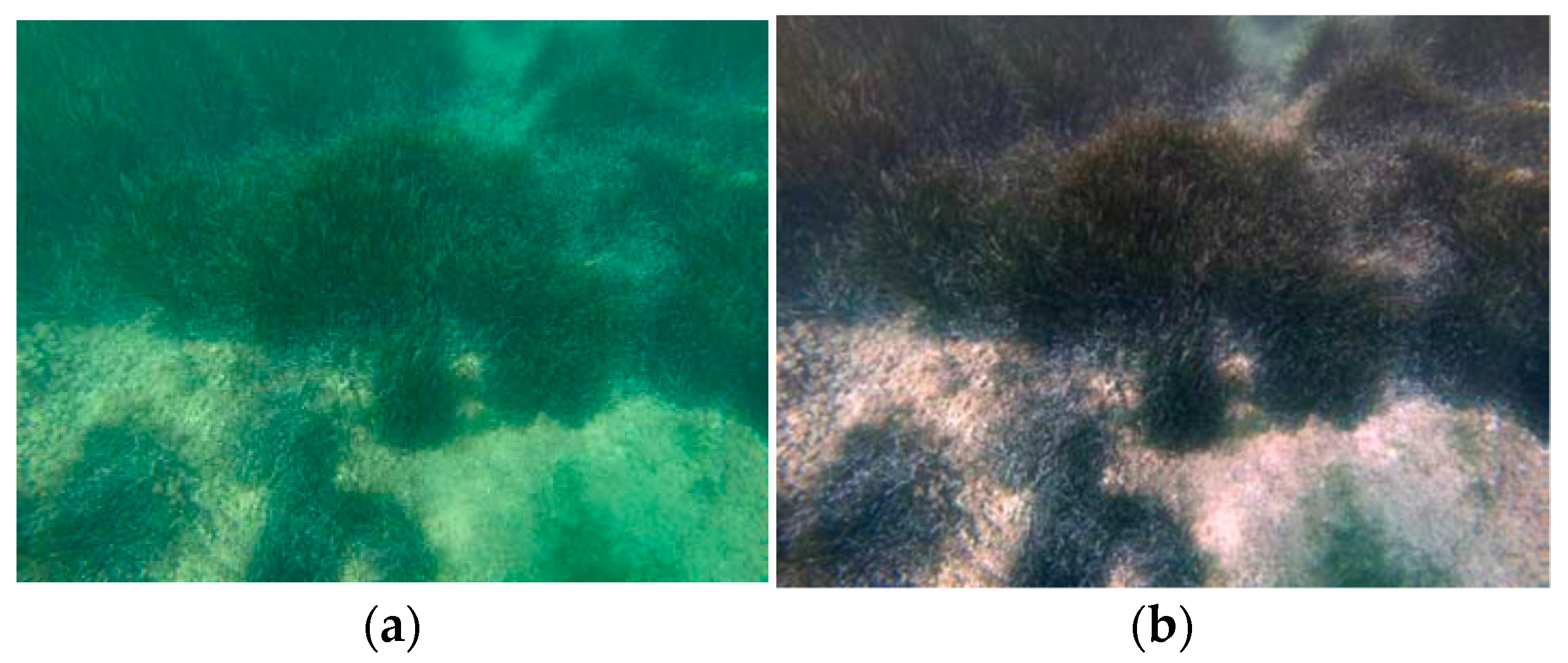
| Bianco et al. [24] | “Colour correction of UW images by using the lαβ colour space” | “Transformation of UW images from the RGB colour space to the lαβ colour space” | “Comparisons with other colour spaces and effectiveness in 3D reconstruction application” | --- |
| Wu et al. [25] | “A systematic approach for UW image restoration based on colour correction and nonlocal prior” | “Eliminate UW image colour distortion to make the corrected UW images look like hazy, and then use a dehazing approach to remove backscattering” | “Visual Inspection and comparison with two other methods” | --- |
| Liu et al. [26] | “Colour correction scheme based on local surface reflectance statistics for UW images” | “Image Segmentation and Illumination estimation on UW degraded images using different image patches” | “Application of the method on images downloaded from the internet and comparison with four other approaches” | --- |
| Bianco et al. [27] | “UW Image colour correction based on the gray-world assumption applied in the Ruderman-lαβ opponent colour space” | “Adaptation of the correction to the nonuniform illumination using a local estimation of the illuminant color by average computation with a moving window around all pixels. This is applied to Images captured in different depths and working distances” | “Comparison of the local approach the authors developed with a global approach through visual inspection” | --- |
| Image Restoration Methods | ||||
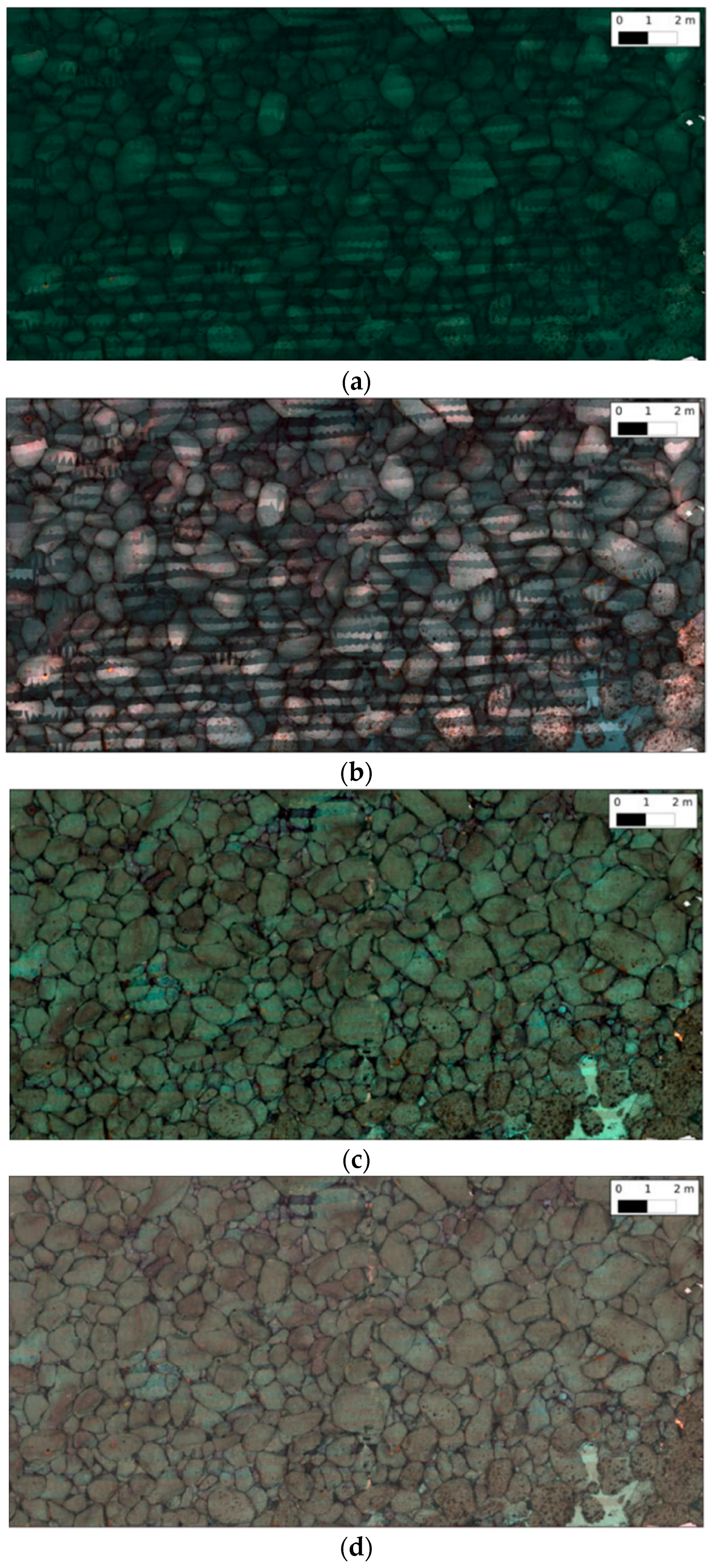
| Bryson et al. [32] | “Exploitation of the 3D structure of the scene generated using structure-from-motion and photogrammetry techniques accounting for distance-based attenuation, vignetting and lighting pattern, and improves the consistency of photo-textured 3D models” | “Colour Correction method applied to UW images captured by an AUV collected in two different UW environments. The colour correction relies to the gray world assumption while considering the scene’s geometry” | “Comparison of image texture standard deviation for the same corrected textures and comparison of 3D photo-textured sceneries utilizing standard and complete water attenuation colour corrected textures” | “Measuring the inconsistency in overlapping images of common Objects” |
| Galdran et al. [34] | “A Red Channel approach for UW photos is presented, which may be seen as a version of the Dark Channel approach for atmospheric image dehazing” | “Pixels of UW images that lie at the maximum scene depth are picked with respect to the camera. Then the transmission from the Red channel is estimated by extending the Dark Channel prior method” | “Visual Inspection and comparison with five other methods. The comparison is carried out through statistical analysis” | “Calculation of relative dispersion between colour channels and their standard deviation thus obtaining 2 different scores, μdiff and σdiff. Additionally the coefficient λ is introduced which is considered as a measure of saturation” |
| Bryson et al. [36] | “A formation model for calculating the true colour of scenery taken from an UW automated vehicle with strobes is proposed” | “The model takes into account the vignetting, attenuation, backscatter coefficient as well as the system geometry meaning that there is information regarding the angle that the light from the strobes hits the object” | “Visual Inspection and the use of calibrated colour charts” | “Evaluation of normalized image intensities on the corrected images with ground truth values using Macbeth colour chart” |
| Akkaynak and Treibitz [37] | “Introduction of a revised UW image formation model that takes into account wideband coefficients of backscatter are different than those of direct transmission” | “Application of the model in various UW scenes captured in shallow waters. The images captured are then photogrammetrically processed to acquire the scene geometry. Using the camera to object distance as well as the true RGB values of colour charts in the scene, the coefficients of the revised model are estimated” | “Visual inspection and statistical analysis using ground truth RGB values of colour charts. The evaluation is done for seven scenarios” | “Statistical analysis of errors through the use of colour charts in various scenarios” |
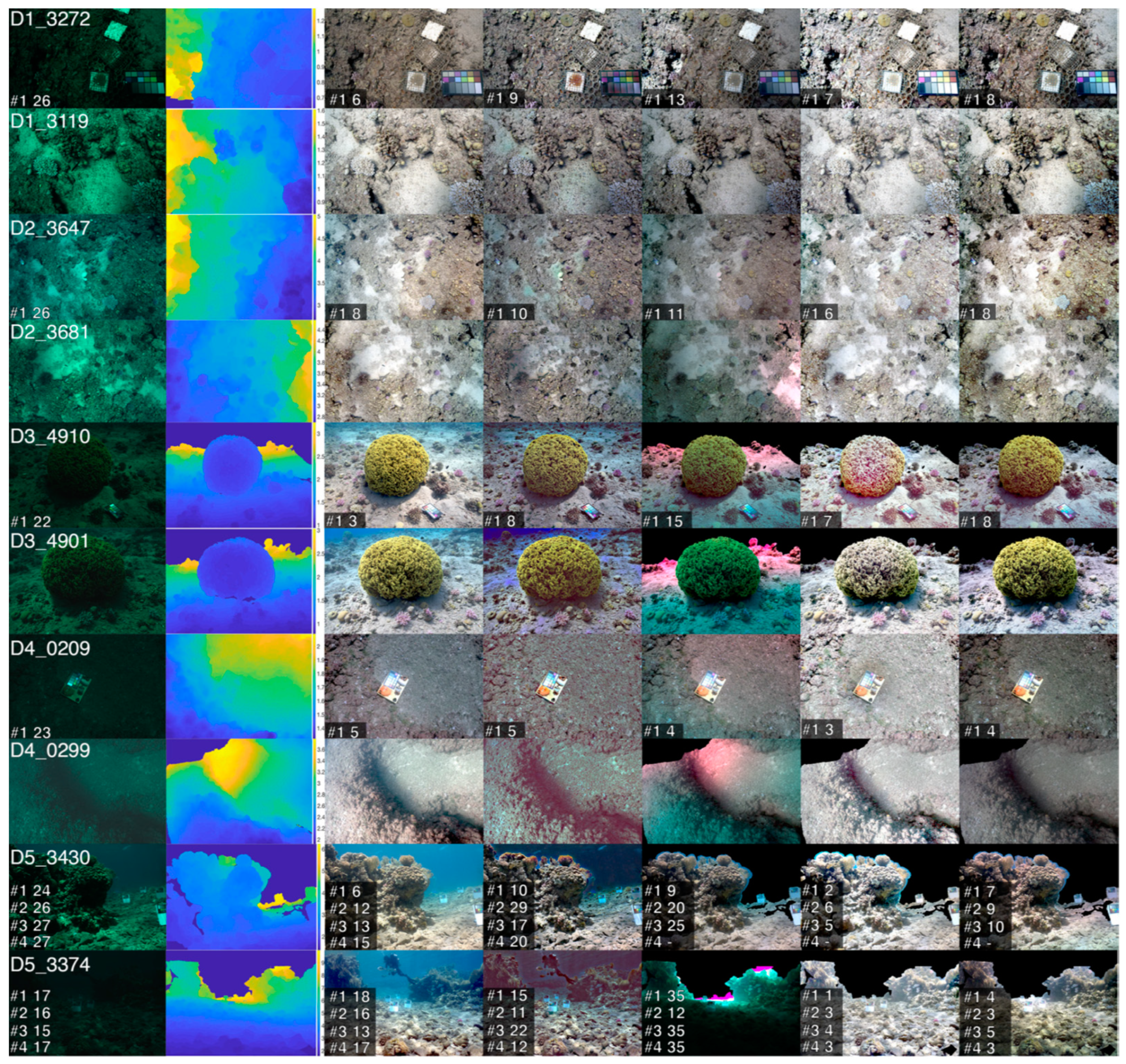
| Akkaynak and Treibitz [38] | “Application of the revised formation model introduced in [37] with some minor changes creating a pipeline for colour reconstruction” | “Multiple datasets in shallow waters from 5 to 15 m UW are used in order to apply the pipeline of Sea-thru” | “Visual inspection and statistical analysis using ground truth RGB values of colour charts. The evaluation is done for 4 other scenarios that then are compared with the results provided by Sea-thru” | “RGB angular error between the six grayscale patches of each chart and a pure gray colour, averaged per chart. Lower value indicates better correction.” “Average errors for the dataset are: raw: 20.57, S1: 12.49, S2: 14.38, S3: 21.77, S4: 4.13, S5: (Sea-thru) 6.33” |
| Artificial Intelligence Methods | ||||
| Torres-Méndez et al. [42] | “Colour restoration of AUV acquired images using statistical priors and Markov Random Fields” | “Two scenarios are applied: (1) UW web images “ground truth” and then are distorted for training. (2) acquisition of UW video by AUV with and without strobes” | “Visual Inspection and comparison with ground truth values” | “CIElab Euclidean distance differences is the similarity measure used to select possible candidates to define the compatibility functions and also to evaluate the performance of this method. Additionally, mean absolute residual (MAR) error between the ground truth and the colour corrected images is computed to evaluate the performance of the algorithm” “For 4 different examples the MAR errors are 9.43, 9.65, 9.82, and 12.20, respectively” |
| Ponce-Hinestroza et al. [43] | “A Spatial Chromatic-MRF Model that accounts for the spatial domain of the images” | “Real UW videos and images are used to apply with Visual Attention White World Assumption (VAWWA) and MRF-BP” | “Visual Inspection and a similarity measure from statistical analysis” | “They define a similarity measure S which is an Euclidean norm between a current vector of statistical parameters and the same vector in the previous frame” “S > 0.01 for a feasible training for the MRF model” |
| Ponce-Hinestroza [45] | “An automatic way to generate a training set for a MRF designed to recover the colour in a video sequence based on existing colour restoration techniques reported in literature” | “A multiple colour space analysis and processing stage is done to automatically recover the colour in an image frame of an UW video sequence to be used as a training set in the MRF model” | “Visual Inspection and comparison with other known methods from the literature” | “They define a similarity measure S which is an Euclidean norm between a current vector of statistical parameters and the same vector in the previous frame” “S > 0.01 for a feasible training for the MRF model” |
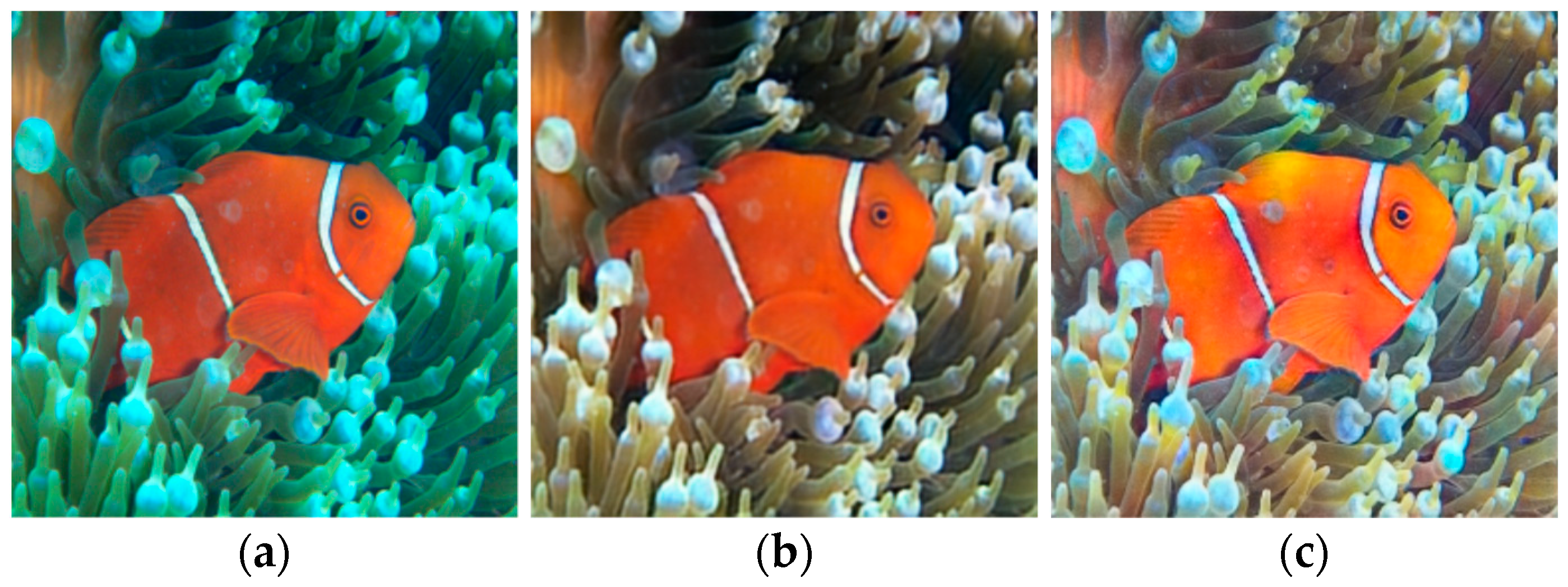
| Li et al. [46] | “A weakly supervised model for UW image colour correction, which maps the colour from the scenes of UW into the scenes of air without any explicit pair labels” | “The model takes as input an UW image and directly outputs a coloured image as if it was taken without the water” | “Visual Inspection and user study were implemented” | “The user study utilized metric from 1 (worst) to 8 (best). The scores for the method introduced applied in 5 images is as follows: 7.5, 7.5, 6.2, 6.2, 6.6” |
| Hashisho et al. [47] | “A UDAE model was developed, which is a deep learning network based on a single denoising autoencoder using U-Net as CNN architecture” | “A synthetic dataset is constructed using a generative deep learning method. The dataset has a combination of different UW scenarios” | “Visual Inspection and comparison with UGAN algorithm” | “Three metrics were used for comparison with UGAN. MSE, SSIM and MS-SSIM-L1. MSE and MS-SSIM-L1 give a score 0 for identical images, while SSIM gives a score 1. For UDAE the metric values were 0.0028, 0.9653, 0.0753 where for UGAN were 0.0061, 0.9186, 0.1415” |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vlachos, M.; Skarlatos, D. An Extensive Literature Review on Underwater Image Colour Correction. Sensors 2021, 21, 5690. https://doi.org/10.3390/s21175690
Vlachos M, Skarlatos D. An Extensive Literature Review on Underwater Image Colour Correction. Sensors. 2021; 21(17):5690. https://doi.org/10.3390/s21175690
Chicago/Turabian StyleVlachos, Marinos, and Dimitrios Skarlatos. 2021. "An Extensive Literature Review on Underwater Image Colour Correction" Sensors 21, no. 17: 5690. https://doi.org/10.3390/s21175690
APA StyleVlachos, M., & Skarlatos, D. (2021). An Extensive Literature Review on Underwater Image Colour Correction. Sensors, 21(17), 5690. https://doi.org/10.3390/s21175690