
Extension and Limits of Depolarization-Fringe Contrast Roughness Method in Sub-Micron Domain

 , , and
, , and
Abstract
:1. Introduction
2. Theoretical Approach and Simulations
2.1. Theory
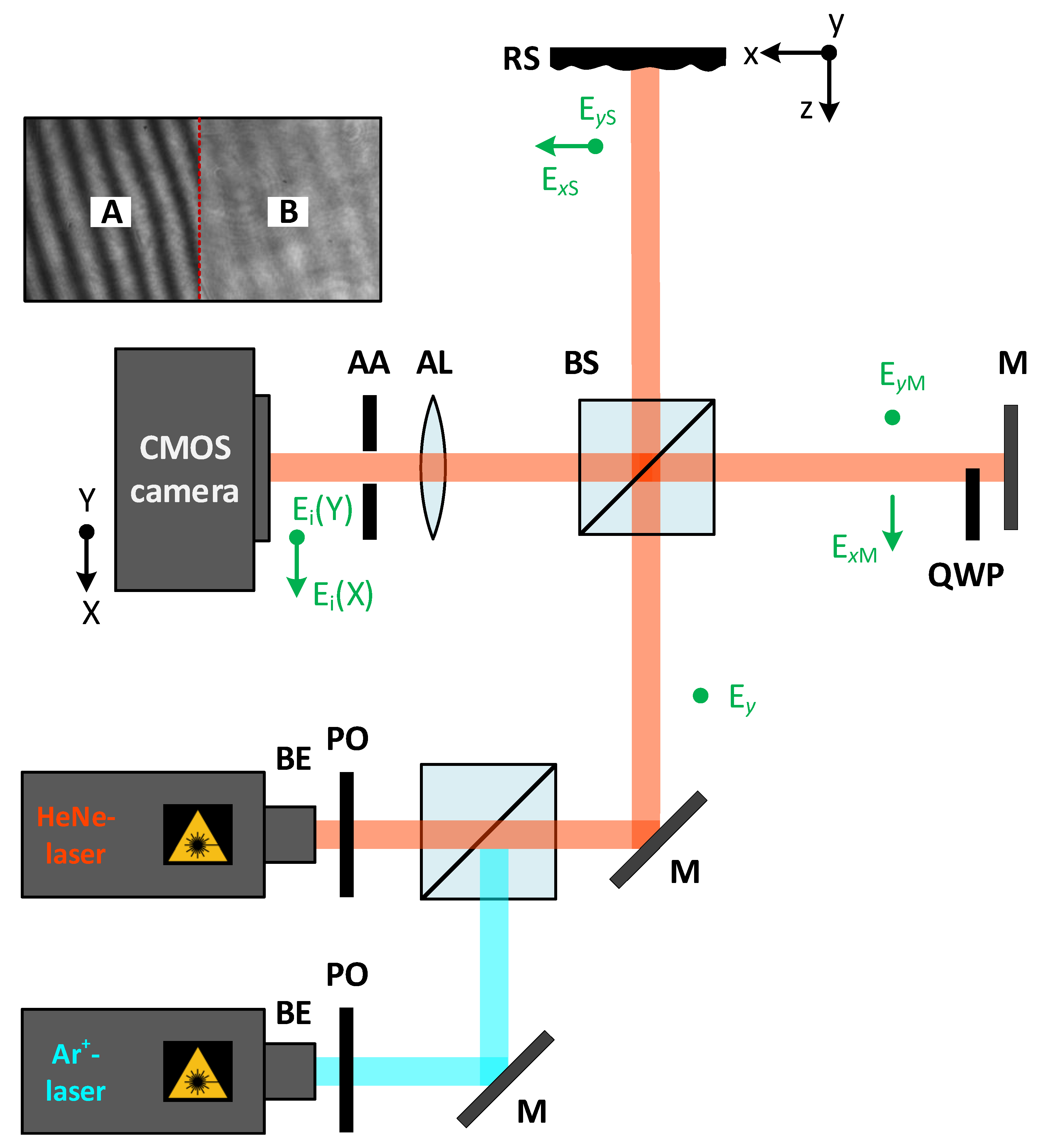
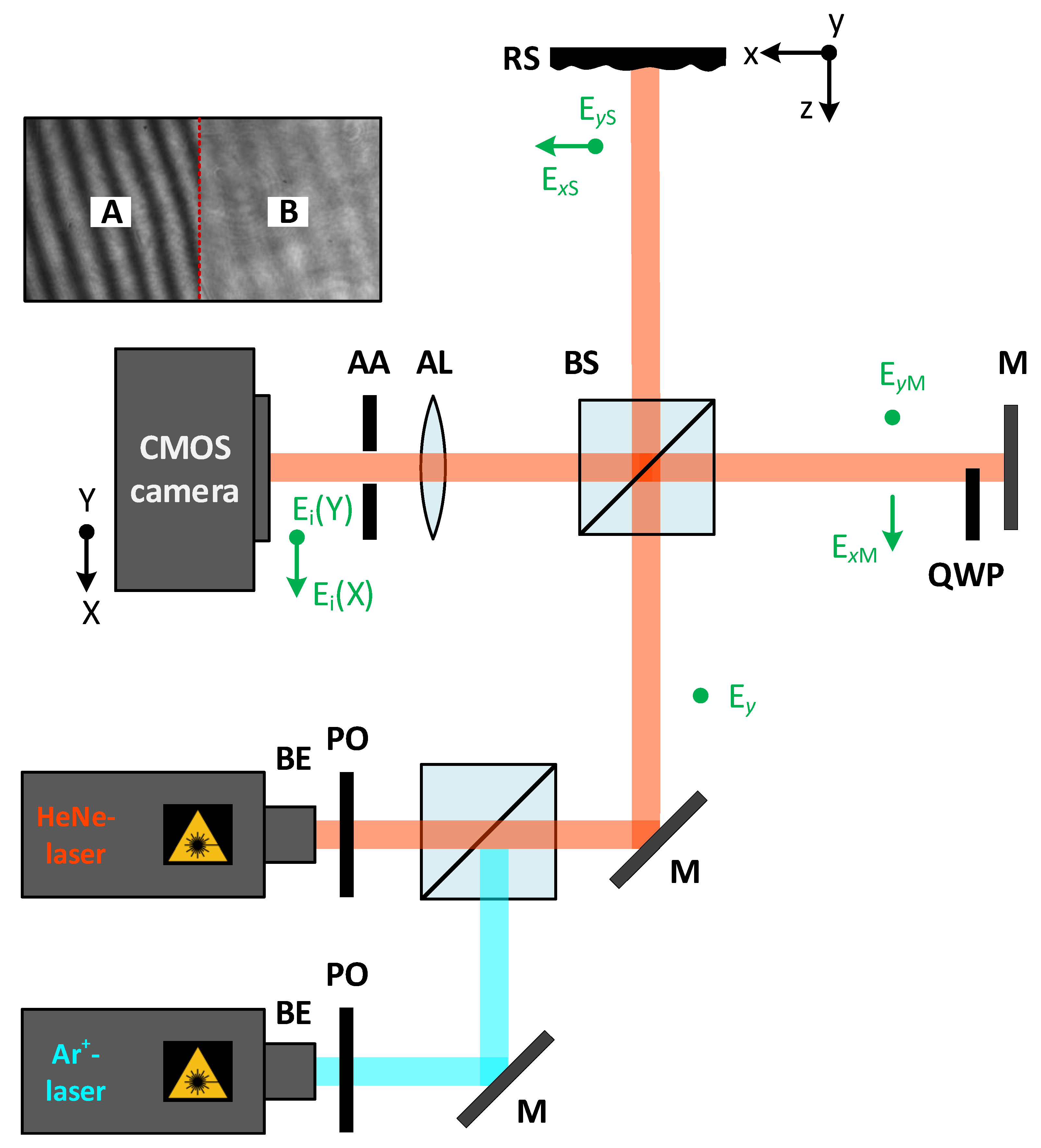
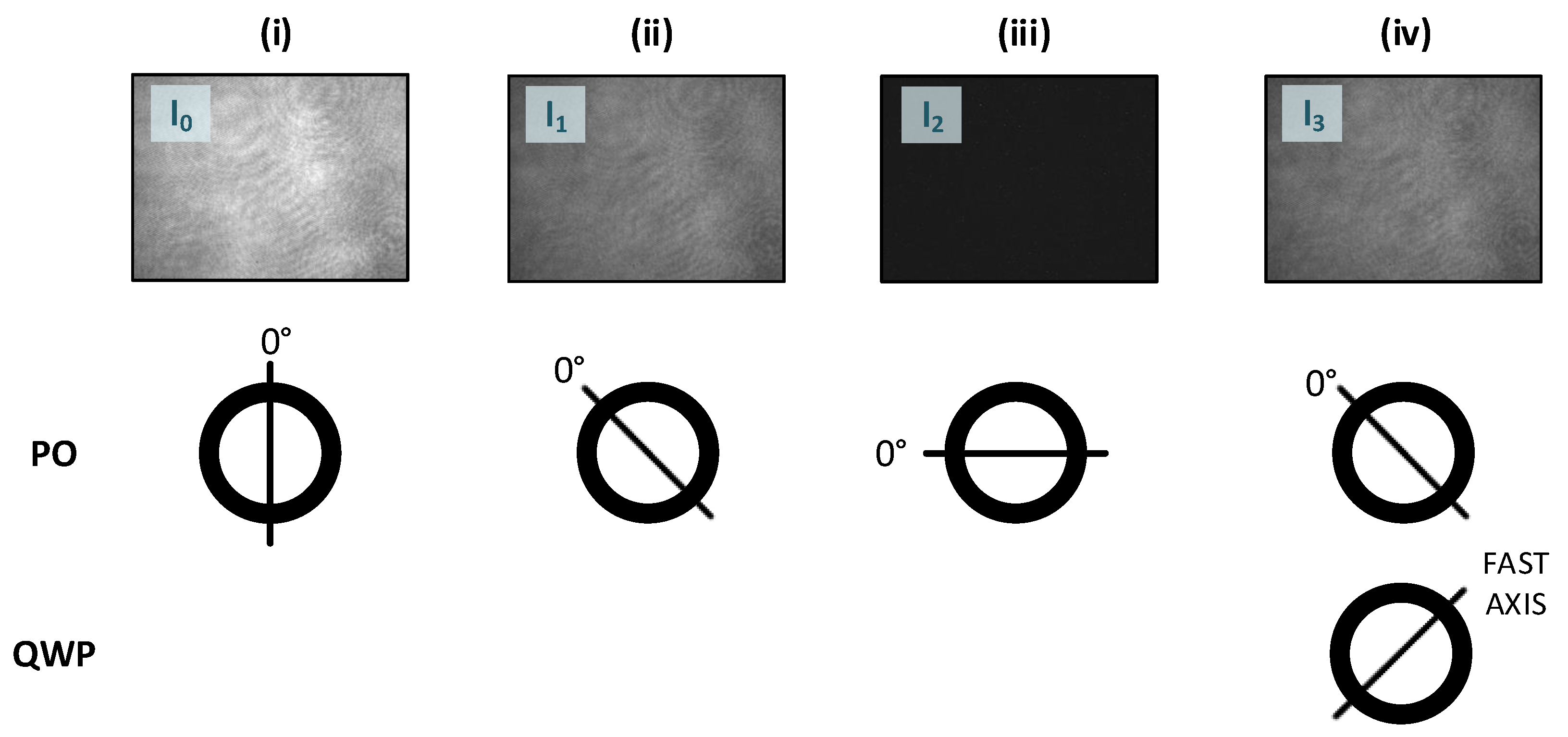
2.2. Optical Setup and Measurement Procedure
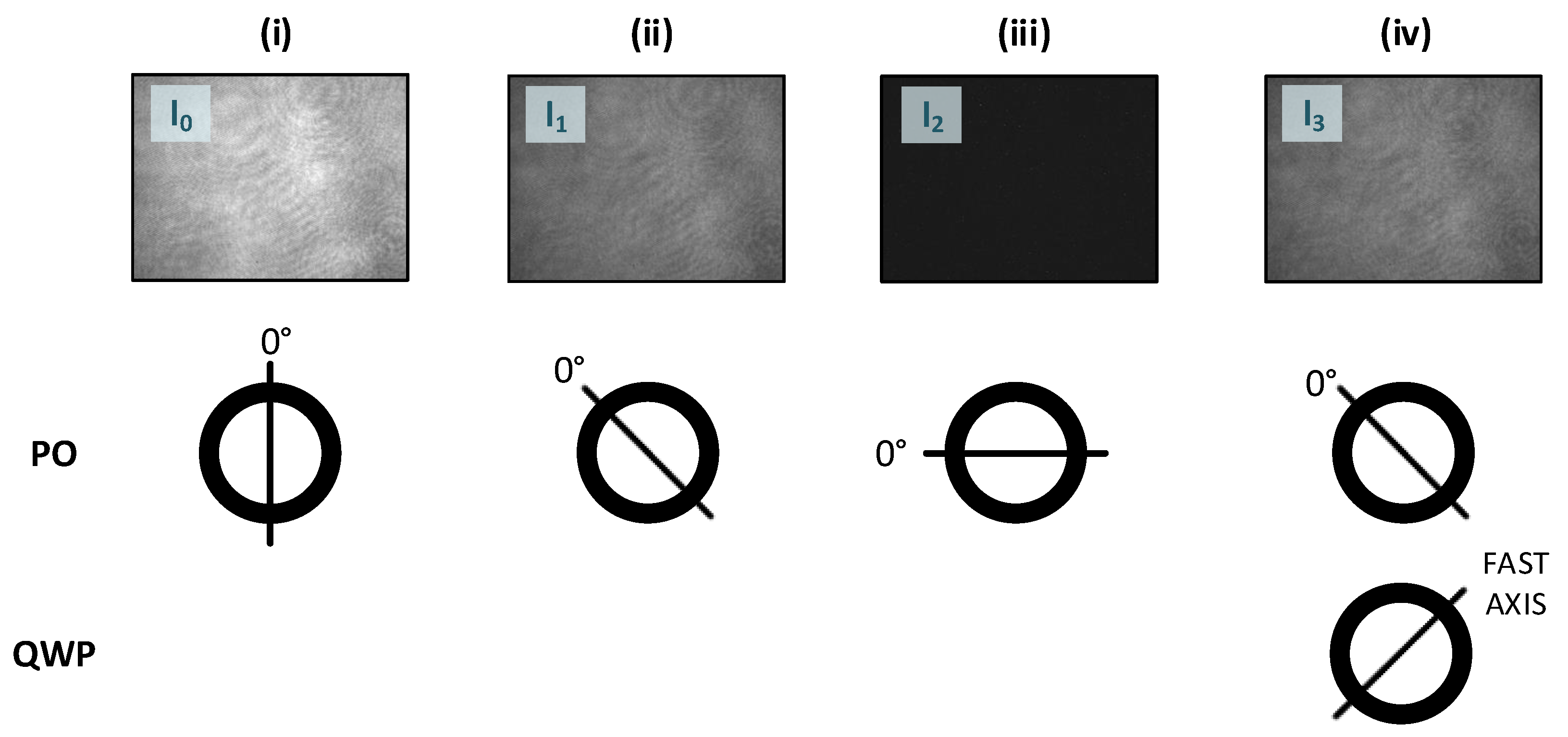
2.3. Degree of Polarization
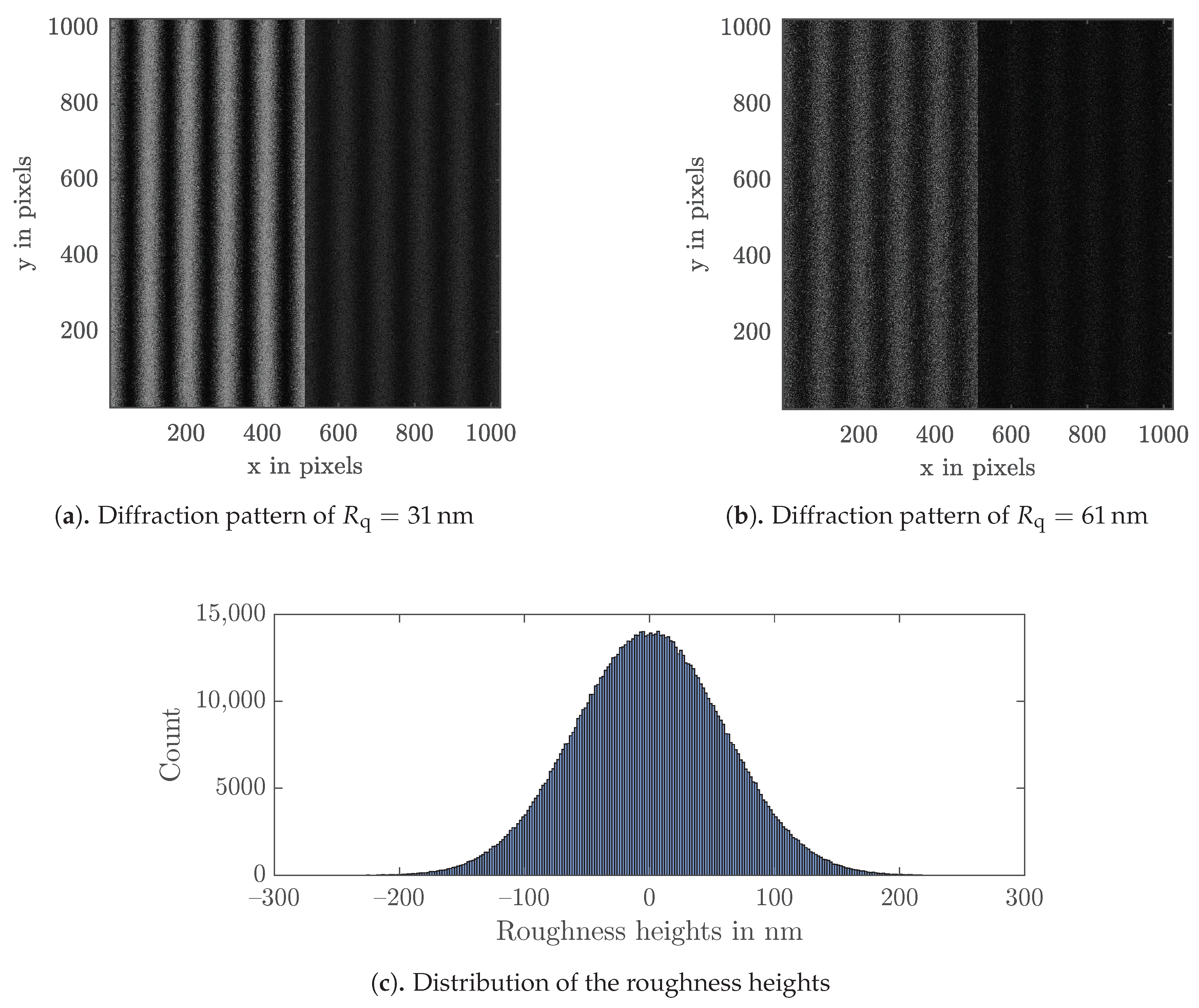
2.4. Simulations
3. Results
3.1. Experimental Results
3.2. Simulation Results
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kadirgama, K.; Noor, M.M.; Abd Alla, A.N. Response Ant Colony Optimization of end milling surface roughness. Sensors 2010, 10, 2054–2063. [Google Scholar] [CrossRef]
- Buj-Corral, I.; Vivancos-Calvet, J. Roughness variability in the honing process of steel cylinders with CBN metal bonded tools. Precis. Eng. 2011, 35, 289–293. [Google Scholar] [CrossRef]
- Woś, P.; Michalski, J. Effect of Initial Cylinder Liner Honing Surface Roughness on Aircraft Piston Engine Performances. Tribol. Lett. 2011, 41, 555–567. [Google Scholar] [CrossRef] [Green Version]
- Chopra, R.; Podczeck, F.; Newton, J.M.; Alderborn, G. The Influence of Film Coating on the Surface Roughness and Specific Surface Area of Pellets. Part. Part. Syst. Charact. 2002, 19, 277–283. [Google Scholar] [CrossRef]
- Alves-Lima, D.; Song, J.; Li, X.; Portieri, A.; Shen, Y.; Zeitler, J.A.; Lin, H. Review of Terahertz Pulsed Imaging for Pharmaceutical Film Coating Analysis. Sensors 2020, 20, 1441. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramesh, K.C.; Sagar, R. Fabrication of Metal Matrix Composite Automotive Parts. Int. J. Adv. Manuf. Technol. 1999, 15, 114–118. [Google Scholar] [CrossRef]
- Hovsepian, P.; Luo, Q.; Robinson, G.; Pittman, M.; Howarth, M.; Doerwald, D.; Tietema, R.; Sim, W.M.; Deeming, A.; Zeus, T. TiAlN/VN superlattice structured PVD coatings: A new alternative in machining of aluminium alloys for aerospace and automotive components. Surf. Coat. Technol. 2006, 201, 265–272. [Google Scholar] [CrossRef]
- Matsuno, H. Biocompatibility and osteogenesis of refractory metal implants, titanium, hafnium, niobium, tantalum and rhenium. Biomaterials 2001, 22, 1253–1262. [Google Scholar] [CrossRef]
- Kim, H.; Choi, S.H.; Ryu, J.J.; Koh, S.Y.; Park, J.H.; Lee, I.S. The biocompatibility of SLA-treated titanium implants. Biomed. Mater. 2008, 3, 025011. [Google Scholar] [CrossRef]
- DIN German Institute for Standardization. DIN EN ISO 25178-6: Geometrical Product Specifications (GPS)-Surface Texture: Areal—Part 6: Classification of Methods for Measuring Surface texture (ISO 25178-6:2010); German Version EN ISO 25178-6:2010; Beuth: Berlin, Germany, 2010. [Google Scholar]
- O’Donnell, K.A. Effects of finite stylus width in surface contact profilometry. Appl. Opt. 1993, 32, 4922–4928. [Google Scholar] [CrossRef] [PubMed]
- Mendeleyev, V.Y. Dependence of measuring errors of rms roughness on stylus tip size for mechanical profilers. Appl. Opt. 1997, 36, 9005–9009. [Google Scholar] [CrossRef]
- Wyant, J.C. Optical Profilers For Surface Roughness. In Measurement and Effects of Surface Defects & Quality of Polish; Baker, L.R., Bennett, H.E., Eds.; SPIE Proceedings; SPIE: Bellingham, WA, USA, 1985; pp. 174–180. [Google Scholar] [CrossRef]
- Windecker, R. Optical roughness measurements using extended white-light interferometry. Opt. Eng. 1999, 38, 1081–1087. [Google Scholar] [CrossRef]
- Carneiro, K.; Jensen, C.P.; Jørgensen, J.F.; Garnœs, J.; McKeown, P.A. Roughness Parameters of Surfaces by Atomic Force Microscopy. CIRP Ann. 1995, 44, 517–522. [Google Scholar] [CrossRef]
- Bezak, T.; Kusy, M.; Elias, M.; Kopcek, M.; Kebisek, M.; Spendla, L. Identification of Surface Topography Scanned by Laser Scanning Confocal Microscope. Appl. Mech. Mater. 2014, 693, 329–334. [Google Scholar] [CrossRef]
- Leonhardt, K.; Droste, U.; Tiziani, H.J. Microshape and rough-surface analysis by fringe projection. Appl. Opt. 1994, 33, 7477–7488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kapłonek, W.; Nadolny, K.; Królczyk, G.M. The Use of Focus-Variation Microscopy for the Assessment of Active Surfaces of a New Generation of Coated Abrasive Tools. Meas. Sci. Rev. 2016, 16, 42–53. [Google Scholar] [CrossRef] [Green Version]
- Salazar, F.; Belenguer, T.; García, J.; Ramos, G. On Roughness Measurement by Angular Speckle Correlation. Metrol. Meas. Syst. 2012, 19, 373–380. [Google Scholar] [CrossRef] [Green Version]
- Ohtsubo, J. Measurement of roughness properties of diamond-turned metal surfaces using light-scattering method. J. Opt. Soc. Am. A 1986, 3, 982–987. [Google Scholar] [CrossRef]
- Pöller, F.; Salazar Bloise, F.; Jakobi, M.; Wang, S.; Dong, J.; Koch, A.W. Non-Contact Roughness Measurement in Sub-Micron Range by Considering Depolarization Effects. Sensors 2019, 19, 2215. [Google Scholar] [CrossRef] [Green Version]
- Chandley, P.J. Determination of the standard deviation of height on a rough surface using interference microscopy. Opt. Quantum Electron. 1979, 11, 407–412. [Google Scholar] [CrossRef]
- Zeman, M.; van Swaaij, R.A.C.M.M.; Metselaar, J.W.; Schropp, R.E.I. Optical modeling of a-Si:H solar cells with rough interfaces: Effect of back contact and interface roughness. J. Appl. Phys. 2000, 88, 6436–6443. [Google Scholar] [CrossRef]
- Artus, G.R.J.; Jung, S.; Zimmermann, J.; Gautschi, H.P.; Marquardt, K.; Seeger, S. Silicone Nanofilaments and Their Application as Superhydrophobic Coatings. Adv. Mater. 2006, 18, 2758–2762. [Google Scholar] [CrossRef]
- Terriza, A.; Álvarez, R.; Borrás, A.; Cotrino, J.; Yubero, F.; González-Elipe, A.R. Roughness assessment and wetting behavior of fluorocarbon surfaces. J. Colloid Interface Sci. 2012, 376, 274–282. [Google Scholar] [CrossRef] [PubMed]
- Demas, N.G.; Lorenzo-Martin, C.; Ajayi, O.O.; Erck, R.A.; Shareef, I. Measurement of Thin-film Coating Hardness in the Presence of Contamination and Roughness: Implications for Tribology. Metall. Mater. Trans. A 2016, 47, 1629–1640. [Google Scholar] [CrossRef]
- Brunetti, V.; Maiorano, G.; Rizzello, L.; Sorce, B.; Sabella, S.; Cingolani, R.; Pompa, P.P. Neurons sense nanoscale roughness with nanometer sensitivity. Proc. Natl. Acad. Sci. USA 2010, 107, 6264–6269. [Google Scholar] [CrossRef] [Green Version]
- Gelmi, A.; Higgins, M.J.; Wallace, G.G. Physical surface and electromechanical properties of doped polypyrrole biomaterials. Biomaterials 2010, 31, 1974–1983. [Google Scholar] [CrossRef] [PubMed]
- Tishkovets, V.P.; Mishchenko, M.I. Coherent backscattering of light by a layer of discrete random medium. J. Quant. Spectrosc. Radiat. Transf. 2004, 86, 161–180. [Google Scholar] [CrossRef]
- Yamaguchi, I. Measurement of surface roughness by speckle correlation. Opt. Eng. 2004, 43, 2753–2761. [Google Scholar] [CrossRef]
- Yu, N.; Aieta, F.; Genevet, P.; Kats, M.A.; Gaburro, Z.; Capasso, F. A broadband, background-free quarter-wave plate based on plasmonic metasurfaces. Nano Lett. 2012, 12, 6328–6333. [Google Scholar] [CrossRef]
- Clarke, D. Interference effects in single wave plates. J. Opt. A Pure Appl. Opt. 2004, 6, 1036–1040. [Google Scholar] [CrossRef]
- Goldstein, D. Polarized Light; Marcel Dekker Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Gascón, F.; Salazar, F. Numerical computation of in-plane displacements and their detection in the near field by double-exposure objective speckle photography. Opt. Commun. 2008, 281, 6097–6106. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample 1 | Sample 2 | Sample 3 | Sample 4 | Sample 5 | Sample 6 | Sample 7 | |
|---|---|---|---|---|---|---|---|
| stylus profiler () | |||||||
| WODSL— () [21] | — | — | |||||
| DBRM— () [21] | — | — | |||||
| WODSL— () | |||||||
| DBRM— () |
| Sample 1 | Sample 2 | Sample 3 | Sample 4 | Sample 5 | Sample 6 | Sample 7 | |
|---|---|---|---|---|---|---|---|
| stylus profiler () | |||||||
| WODSL— () | |||||||
| DBRM— () | |||||||
| WODSL— () | |||||||
| DBRM— () | |||||||
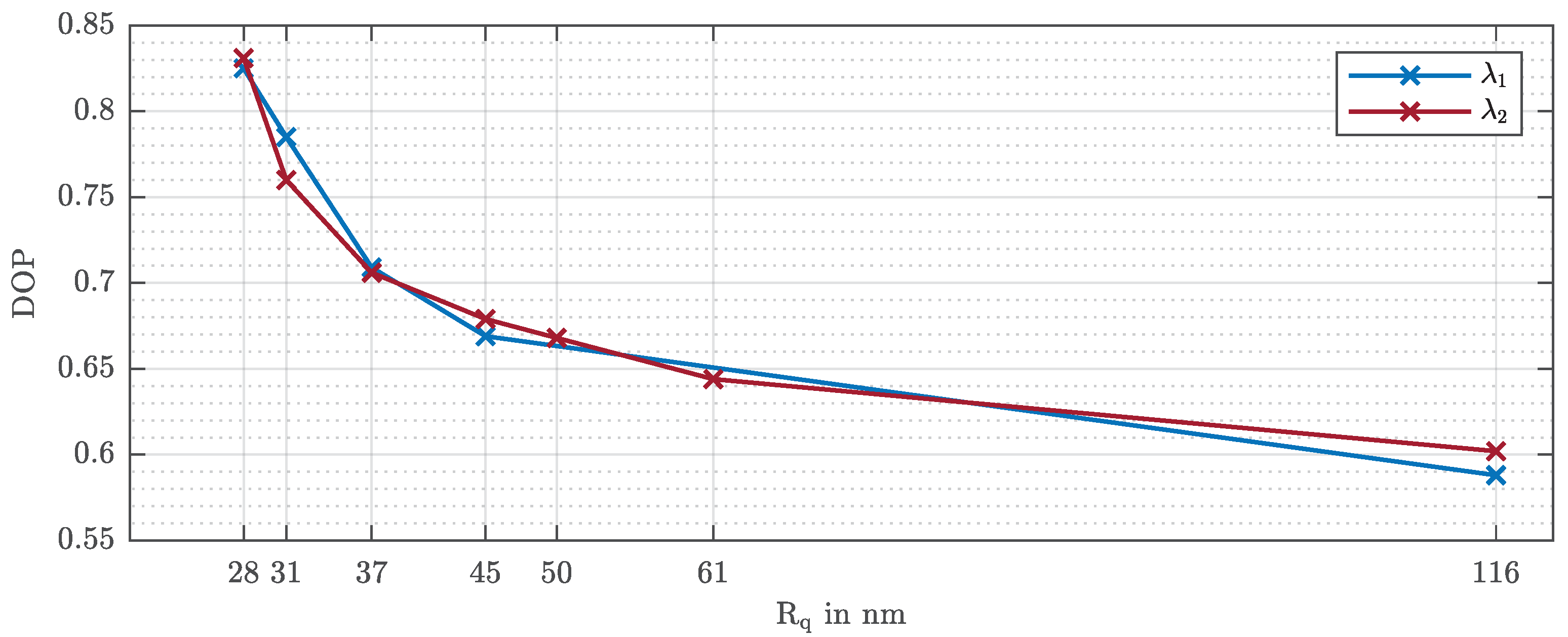
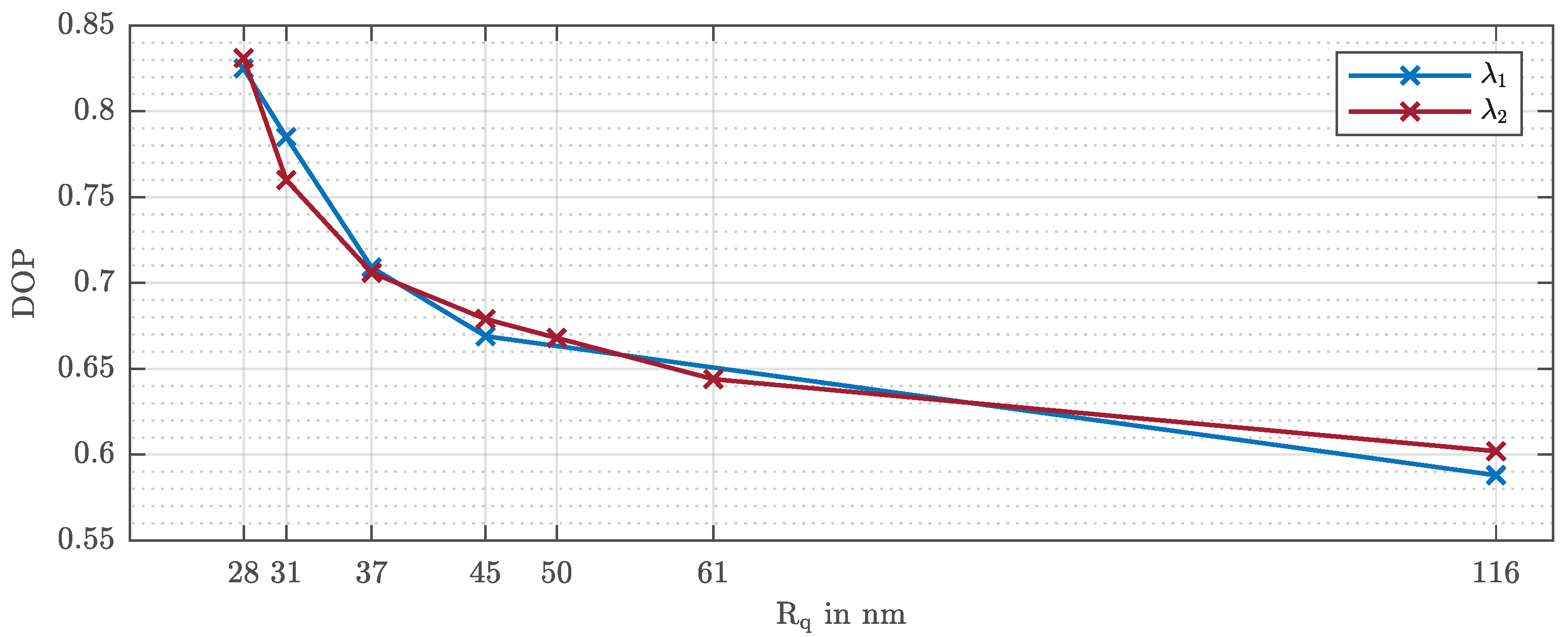
| DOP— | 0.833 | 0.789 | 0.711 | 0.674 | 0.645 | 0.624 | 0.598 |
| DOP— | 0.839 | 0.743 | 0.703 | 0.668 | 0.657 | 0.639 | 0.610 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pöller, F.; Salazar Bloise, F.; Jakobi, M.; Dong, J.; Koch, A.W. Extension and Limits of Depolarization-Fringe Contrast Roughness Method in Sub-Micron Domain. Sensors 2021, 21, 5572. https://doi.org/10.3390/s21165572
Pöller F, Salazar Bloise F, Jakobi M, Dong J, Koch AW. Extension and Limits of Depolarization-Fringe Contrast Roughness Method in Sub-Micron Domain. Sensors. 2021; 21(16):5572. https://doi.org/10.3390/s21165572
Chicago/Turabian StylePöller, Franziska, Félix Salazar Bloise, Martin Jakobi, Jie Dong, and Alexander W. Koch. 2021. "Extension and Limits of Depolarization-Fringe Contrast Roughness Method in Sub-Micron Domain" Sensors 21, no. 16: 5572. https://doi.org/10.3390/s21165572
APA StylePöller, F., Salazar Bloise, F., Jakobi, M., Dong, J., & Koch, A. W. (2021). Extension and Limits of Depolarization-Fringe Contrast Roughness Method in Sub-Micron Domain. Sensors, 21(16), 5572. https://doi.org/10.3390/s21165572