
Analysis of Propagation and Distribution Characteristics of Leakage Acoustic Waves in Water Supply Pipelines



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Analysis
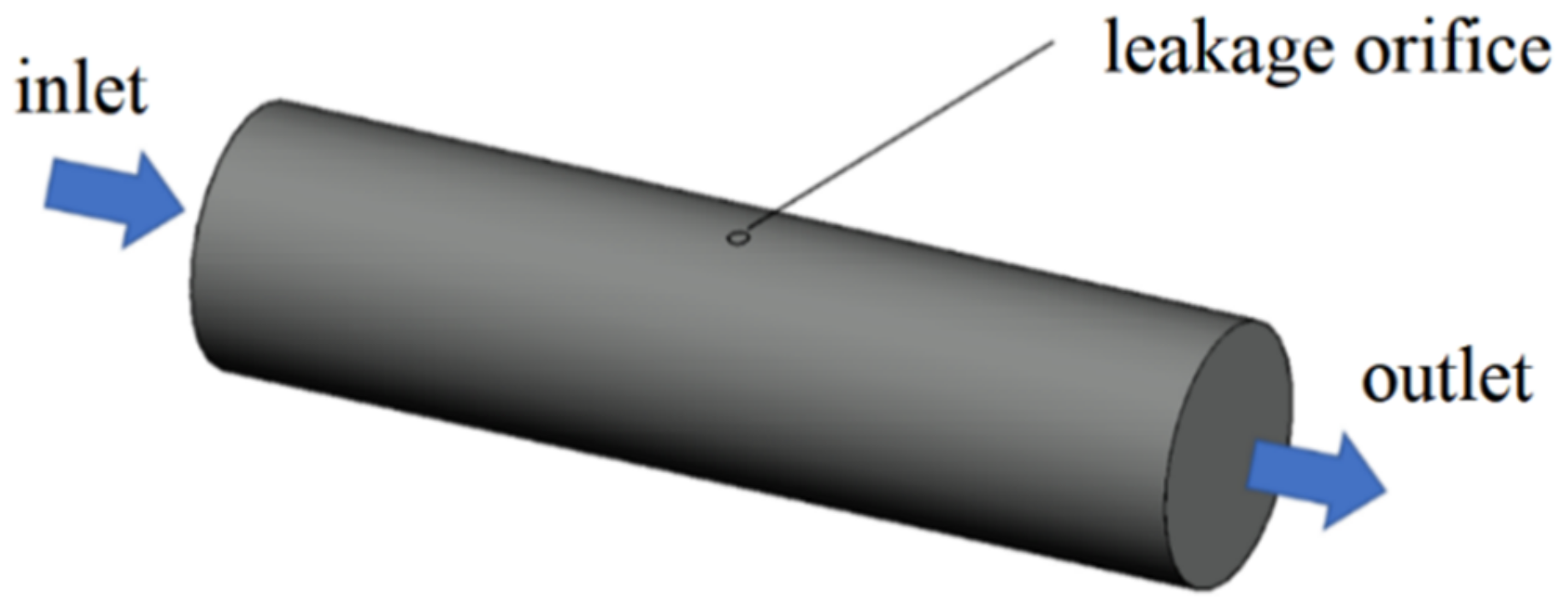
3. Model Construction
4. Simulation Analysis
4.1. Distribution of Acoustic Pressure in the Pipeline and Characteristics of Acoustic Decay
4.2. Effect of Distribution of Monitoring Points
4.3. Effect of Acoustic Source Frequency
4.4. Effect of Pipeline Dimension
4.5. Effect of Acoustic Source Geometry
5. Experimental Study
5.1. Experimental Setup
5.2. Analysis of Experimental Results
6. Conclusions
- (1)
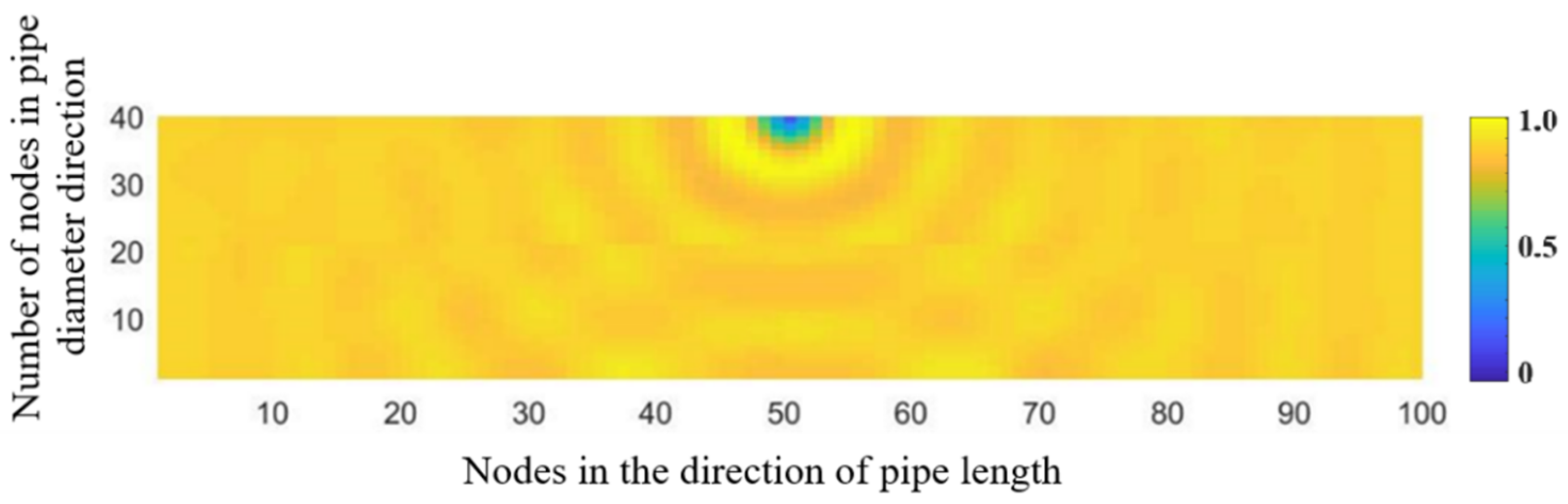
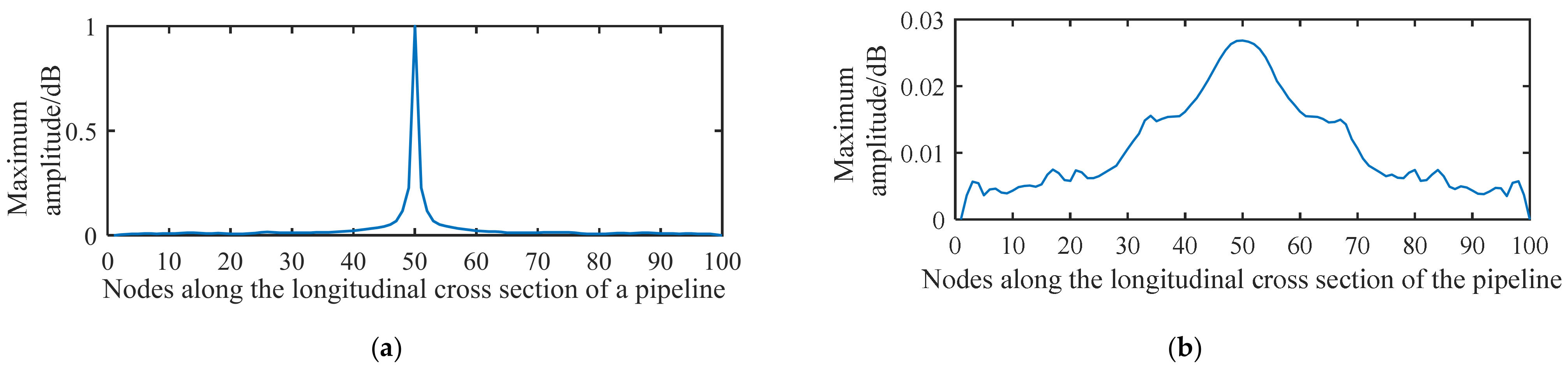
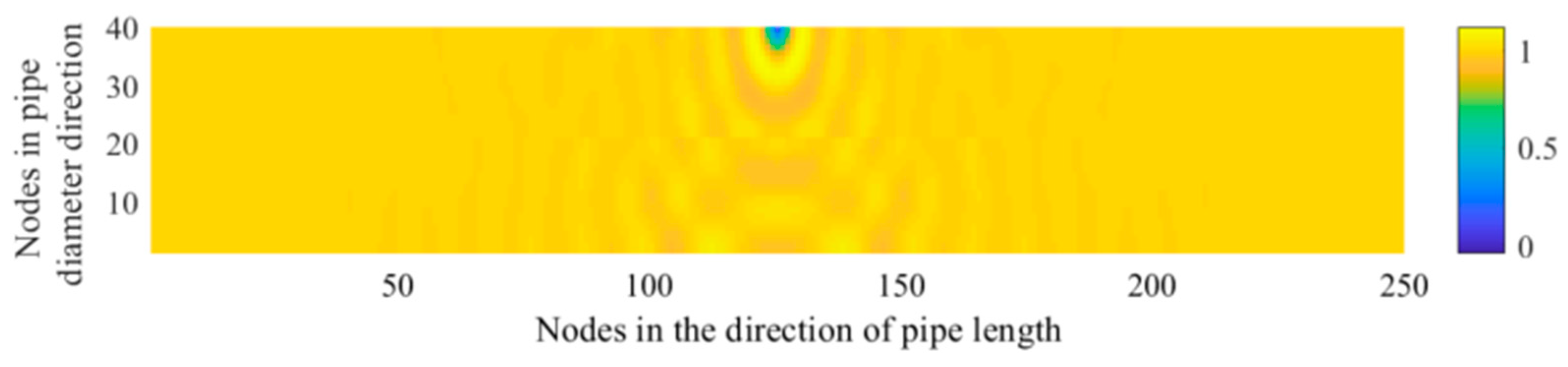
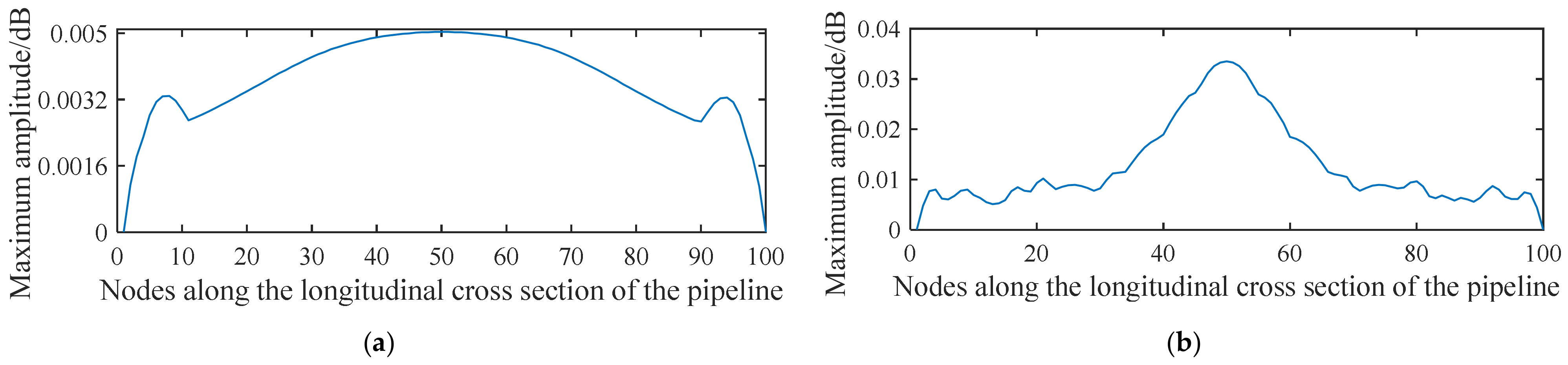
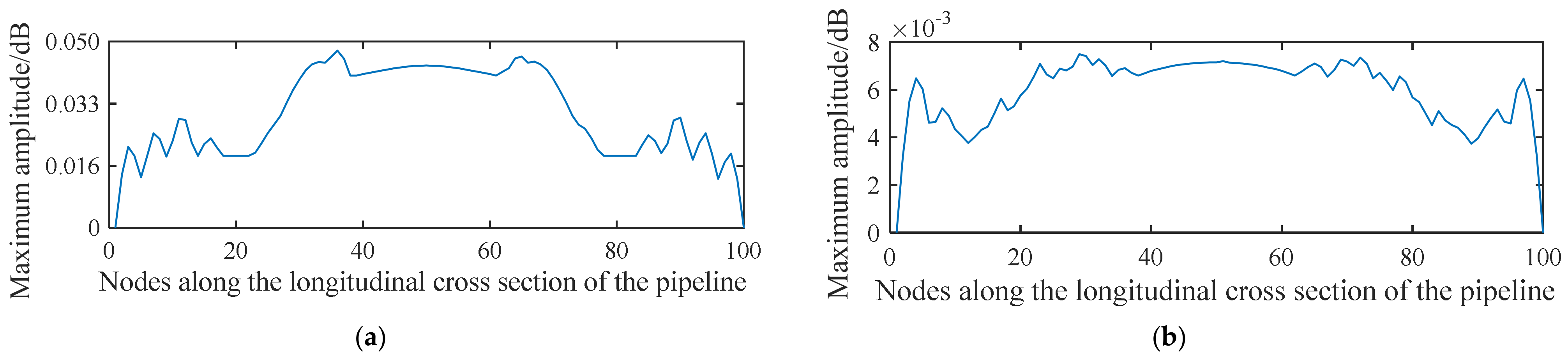
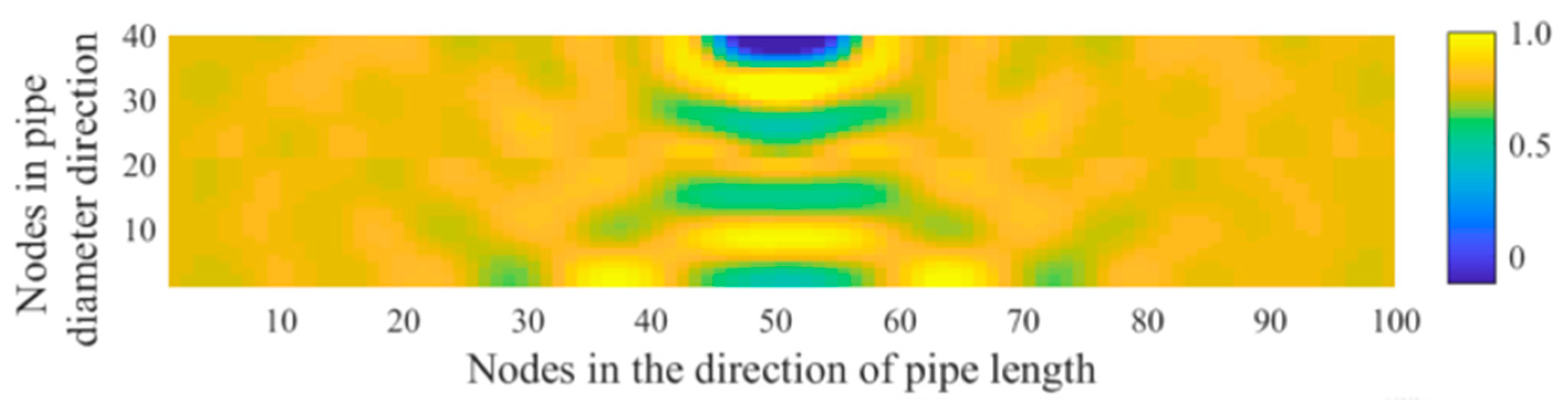
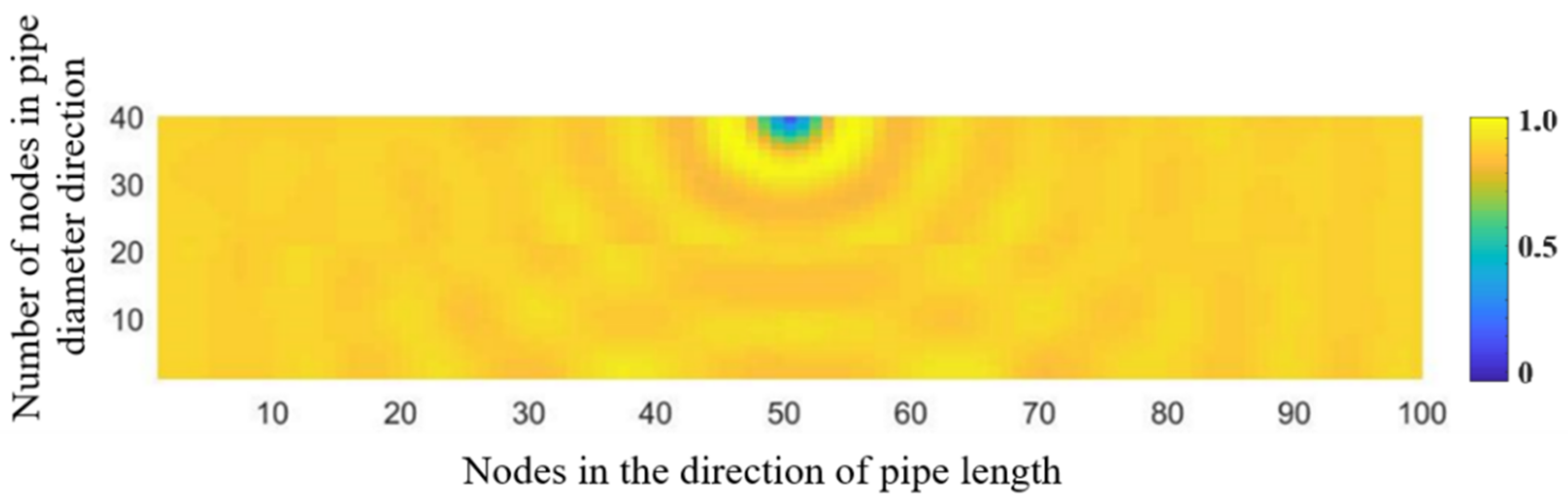
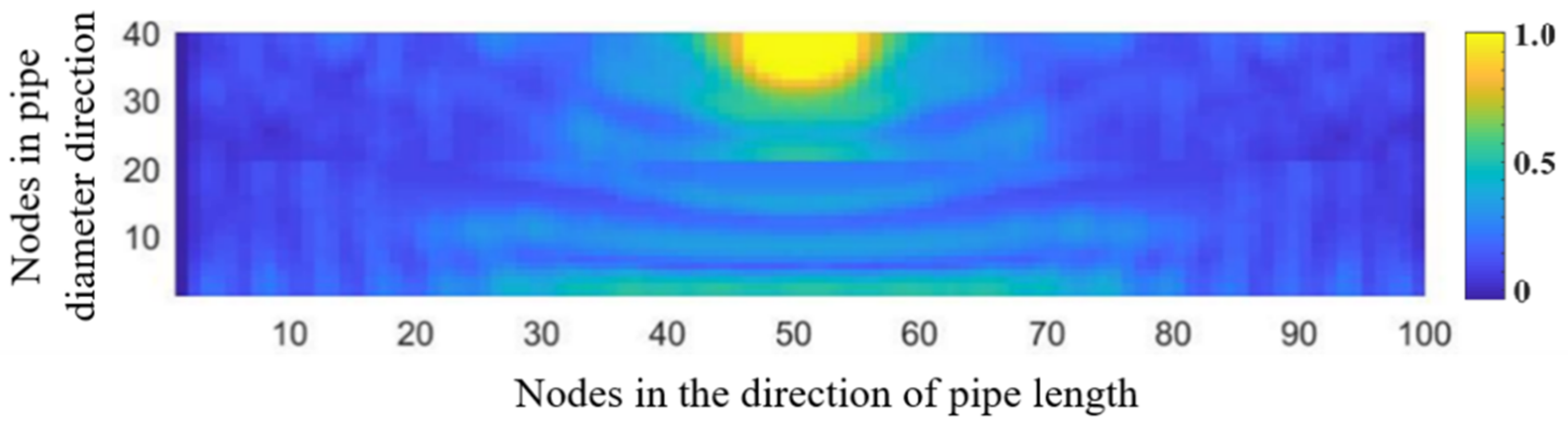
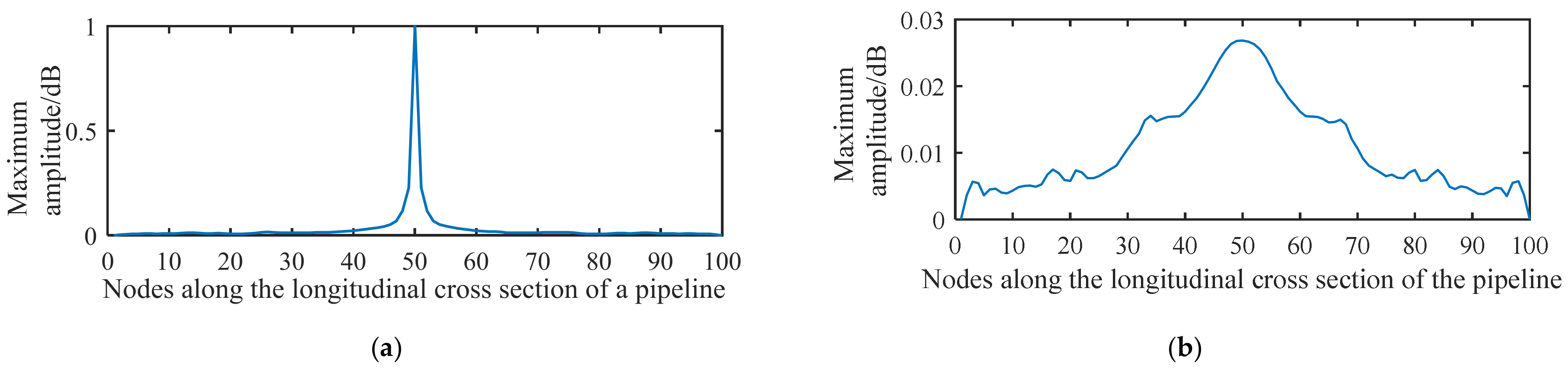
- The acoustic waves reflected by the lower surface of the pipeline and those transmitted from the acoustic source are superimposed in the centre of the pipeline to form interference fringes. The acoustic intensity is greater near the acoustic source in the pipeline and decays quickly when moving away from the acoustic source. When performing leakage detection along the length direction of the pipeline, a significant decay curve of the acoustic intensity can be obtained near the acoustic source. However, the shape of the acoustic wave becomes planar at locations far away from the acoustic source. Meanwhile, the acoustic intensity does not decay significantly at locations far away from the acoustic source.
- (2)
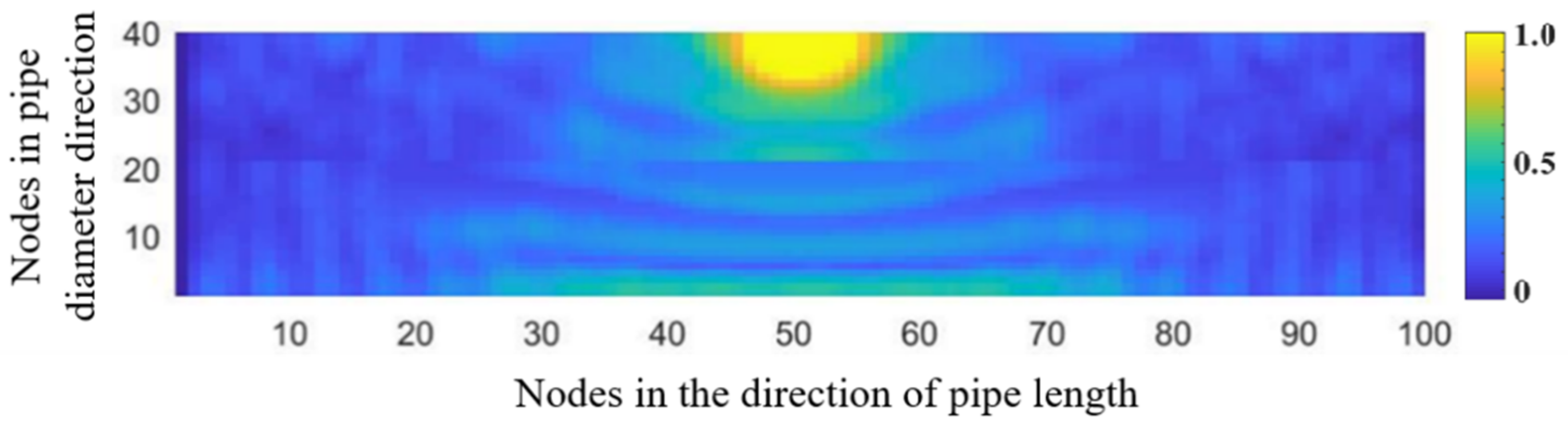
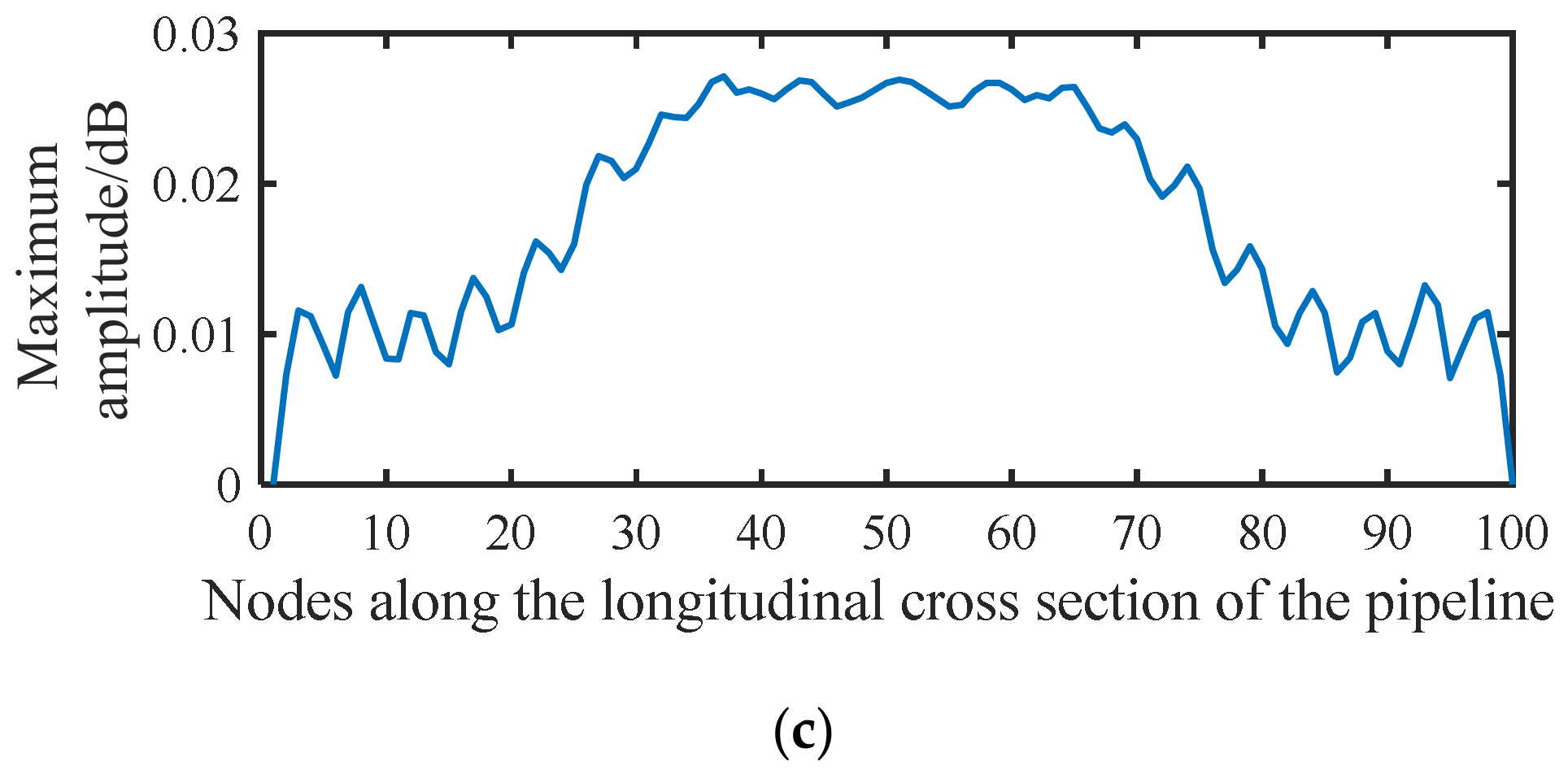
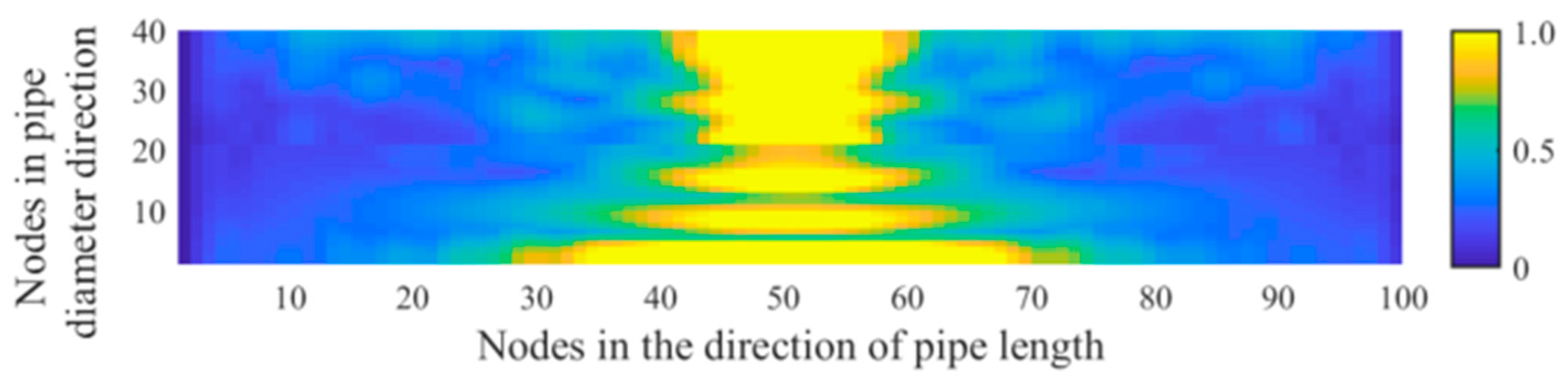
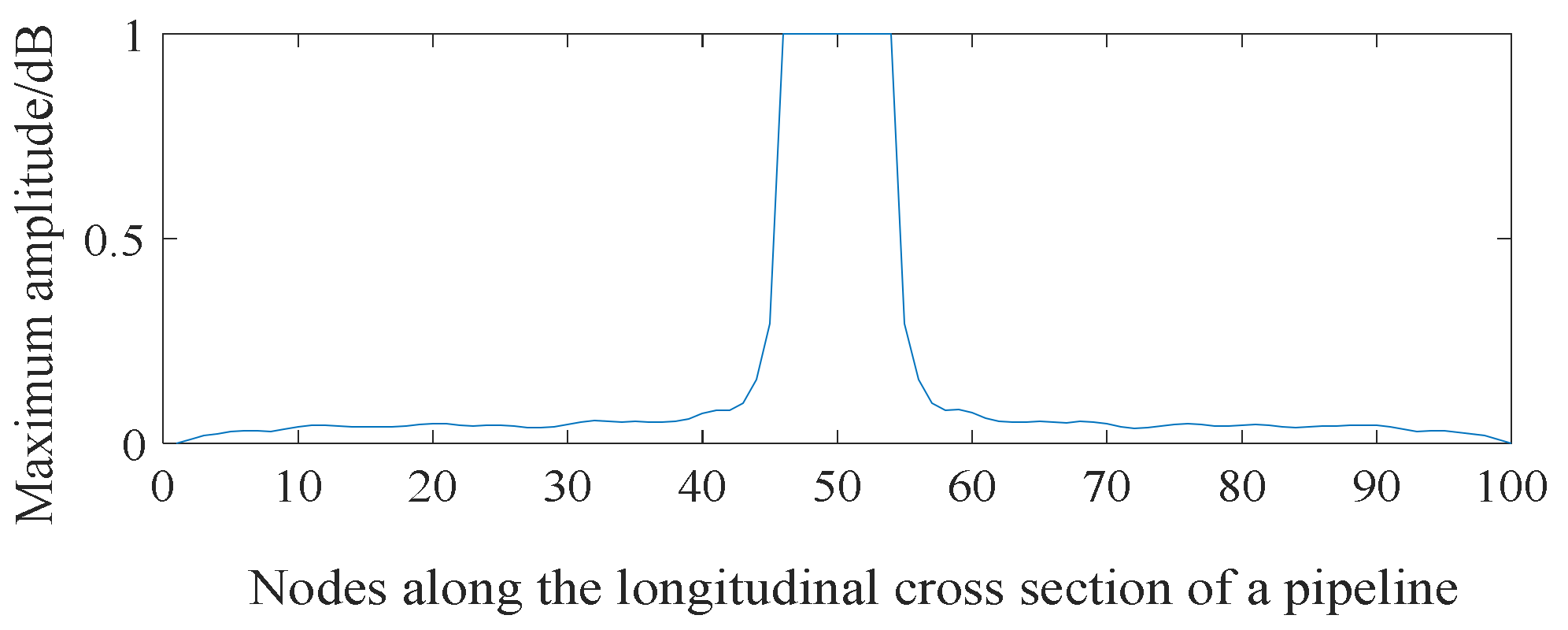
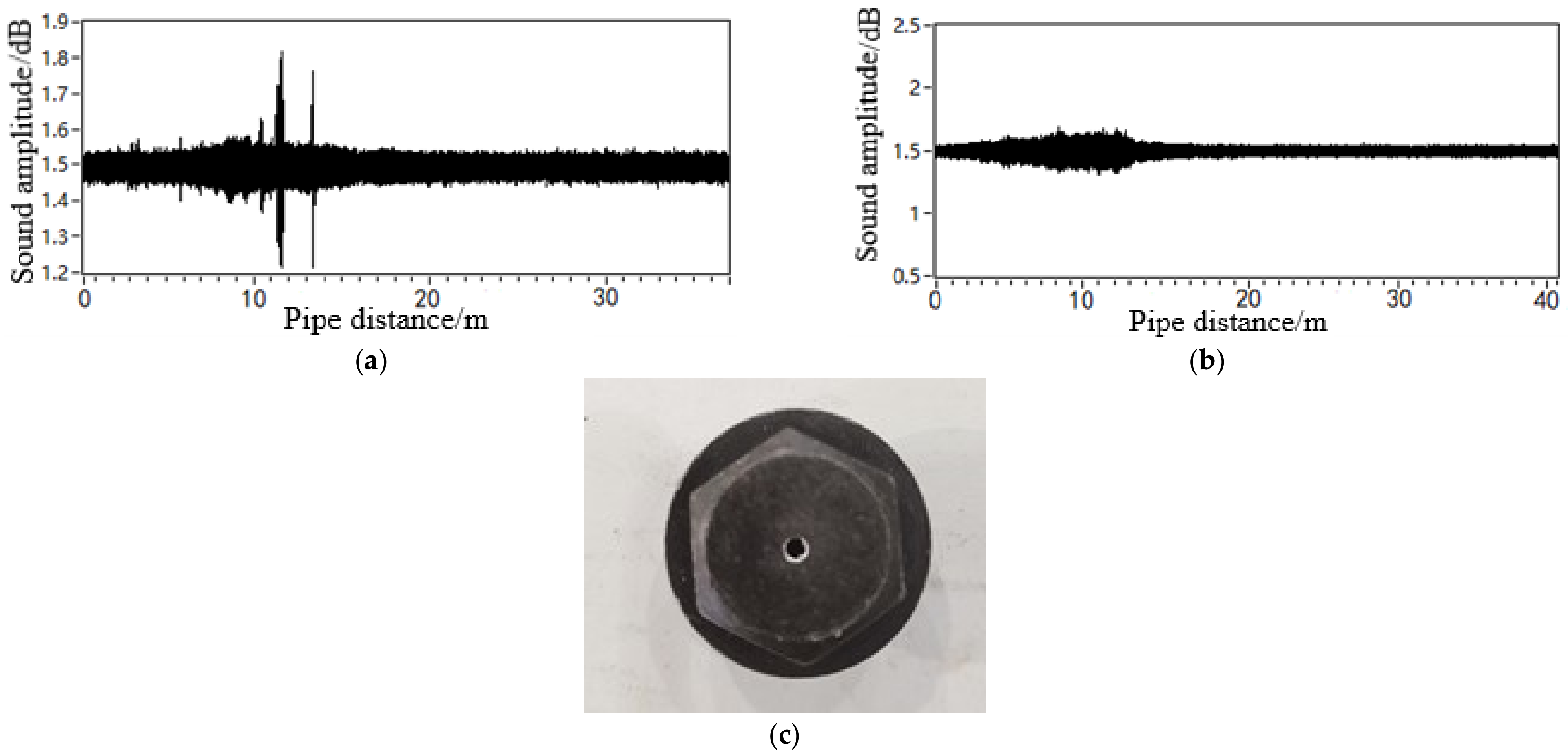
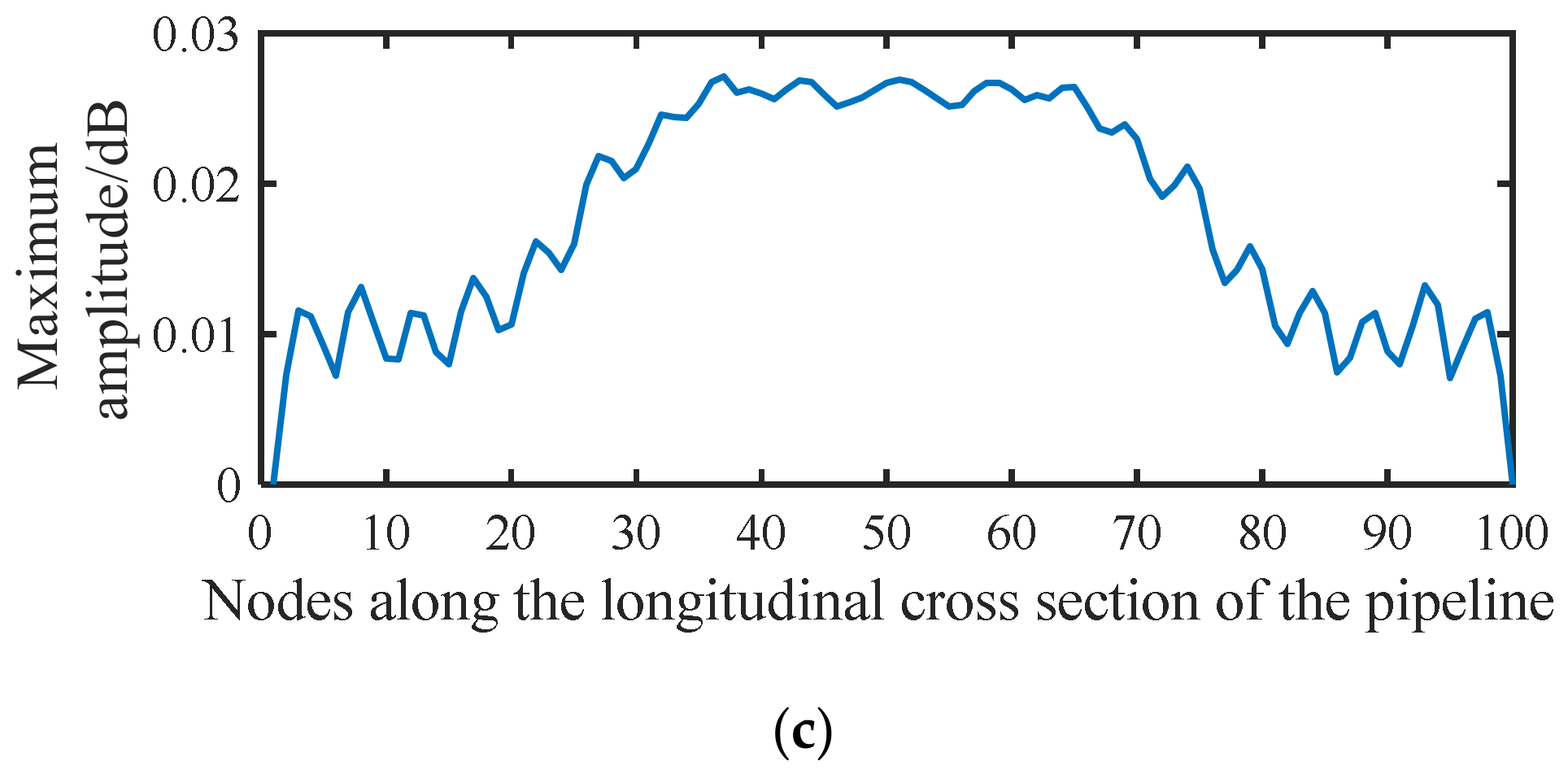
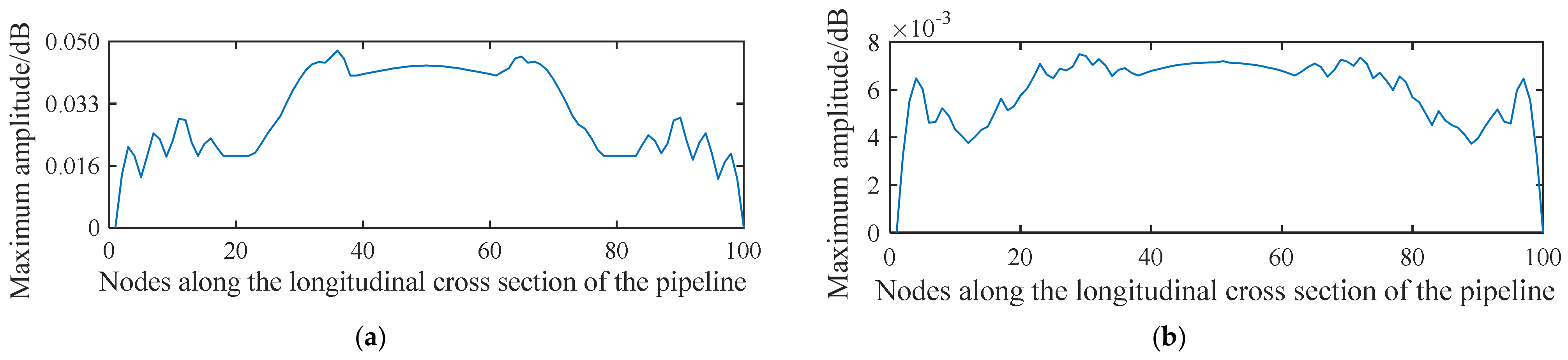
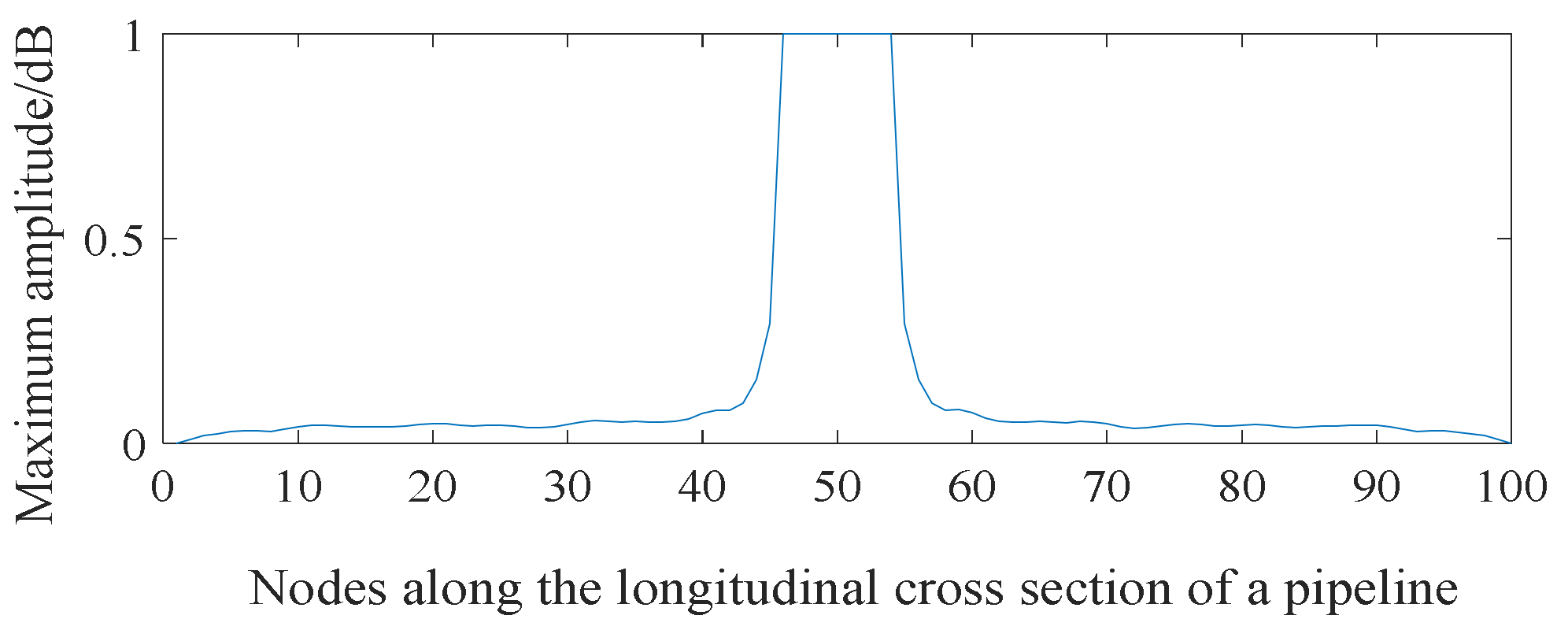
- As the pipeline diameter increases, the decay of the acoustic pressure intensity along the length direction of the pipeline becomes weaker, and the dispersion characteristics become less evident. When the leakage acoustic wave generated by the long strip-shaped leakage hole propagates in the pipeline, it is superimposed with the reflected wave in the radial direction of the pipeline to produce a propagating standing wave. The superimposed wave exhibits a significant ‘single flat peak’ feature in the response amplitude along the length direction of the pipeline.
- (3)
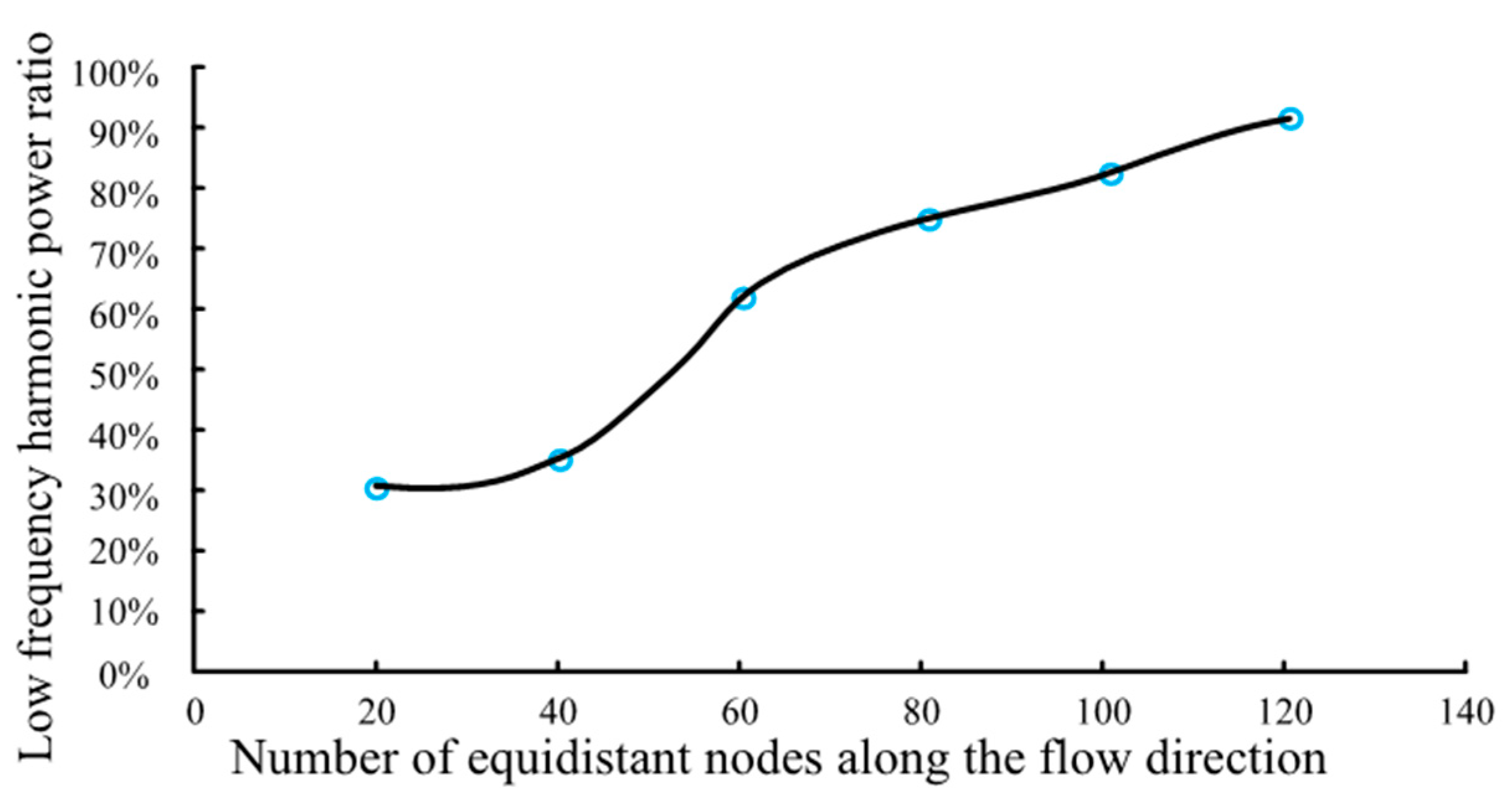
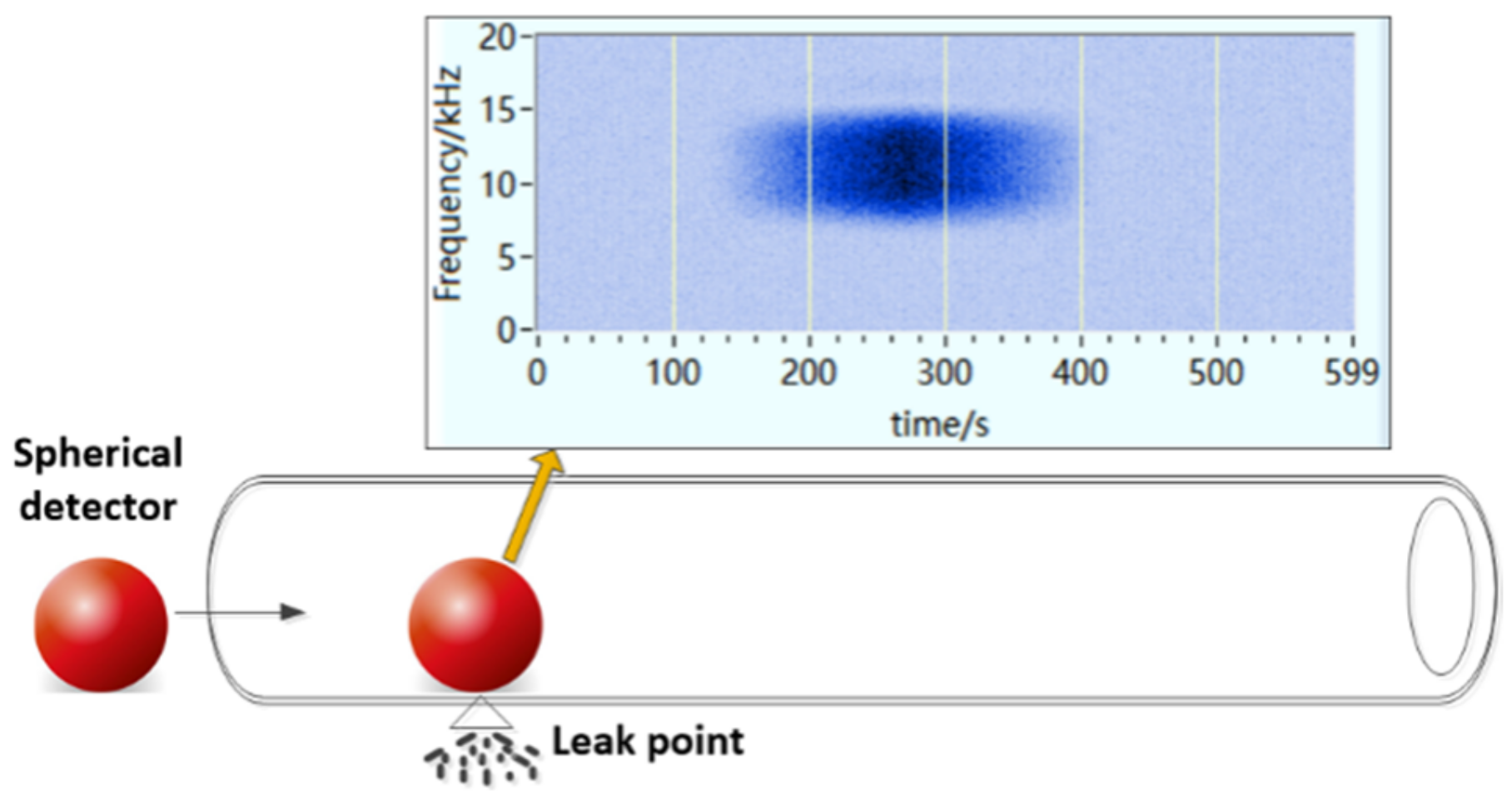
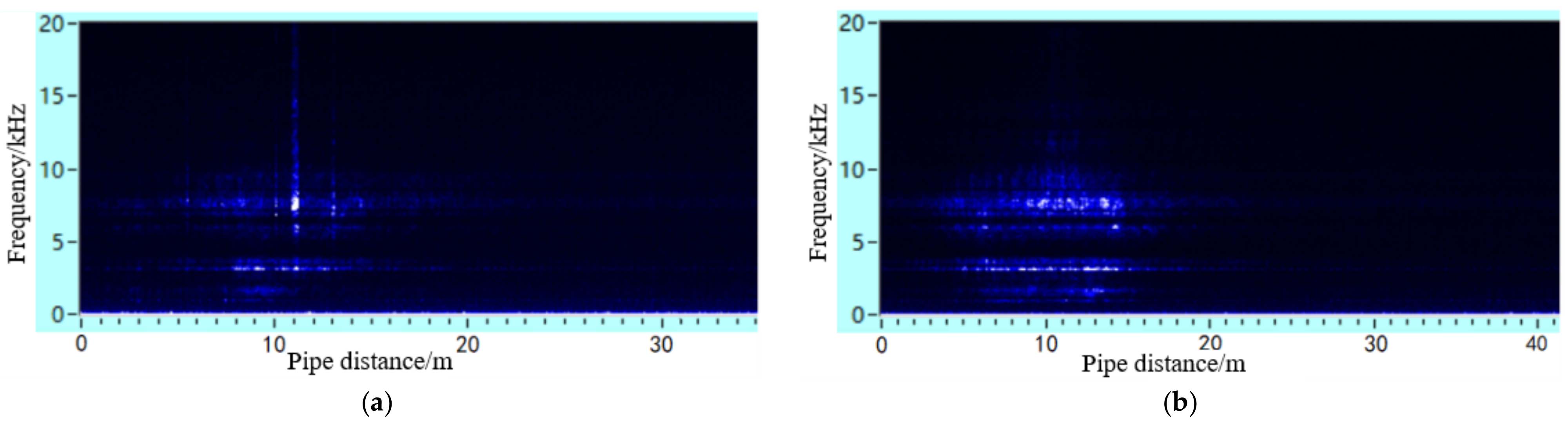
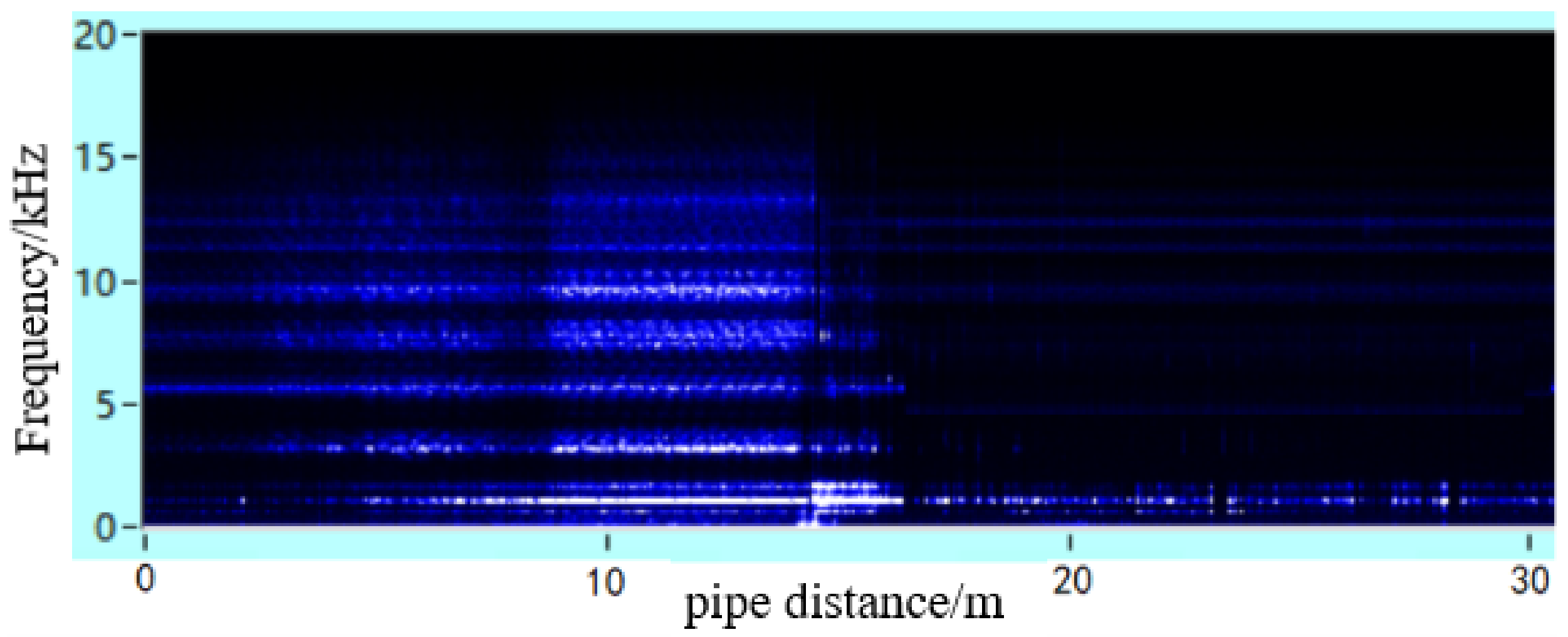
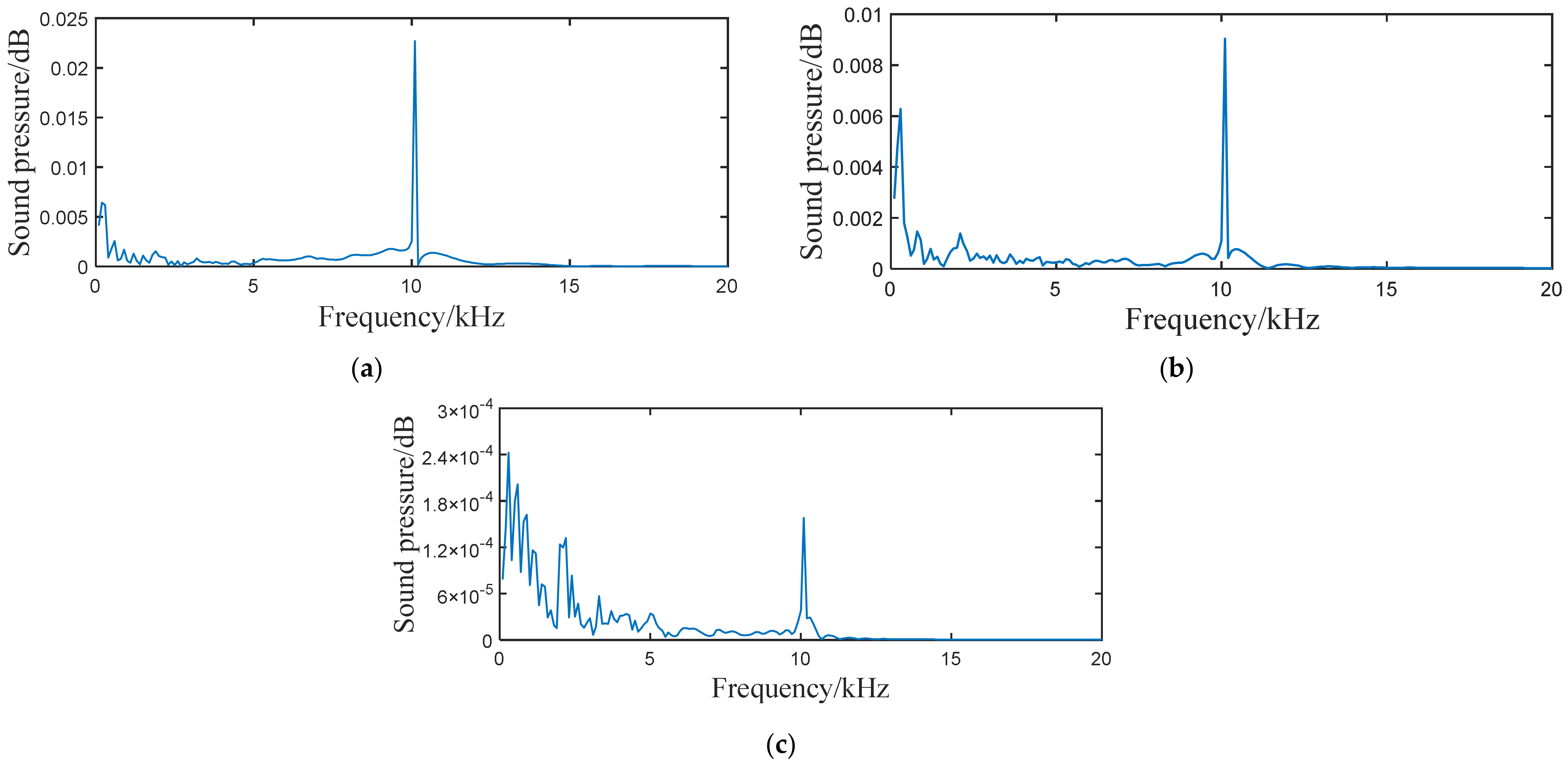
- The farther the monitoring point is from the acoustic source, the greater the proportion of the low-frequency harmonic acoustic pressure intensity is. During the detection of the leakage acoustic wave along the length direction of the pipeline, the signal changes from the superposition of low-frequency harmonics and high-frequency waves of the acoustic source to high-frequency waves of a single acoustic source. In addition, the high-frequency component in the leakage acoustic wave decays more substantially than the low-frequency component along the length direction of the pipeline. As shown by the simulation analysis and simulated experiments, the leakage acoustic wave signal experiences a significant frequency shift along the length direction of the pipeline. Therefore, comprehensive analysis of the characteristics in both the low- and high-frequency ranges is required to detect leakage in water supply pipelines.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Hajibabaei, M.; Nazif, S.; Sereshgi, F.T. Life cycle assessment of pipes and piping process in drinking water distribution networks to reduce environmental impact. Sustain. Cities Soc. 2018, 43, 538–549. [Google Scholar] [CrossRef]
- Babamiri, A.S.; Pishvaee, M.S.; Mirzamohammadi, S. The analysis of financially sustainable management strategies of urban water distribution network under increasing block tariff structure: A system dynamics approach. Sustain. Cities Soc. 2020, 60, 102193. [Google Scholar] [CrossRef]
- Shiau, J.; Chudal, B.; Mahalingasivam, K.; Keawsawasvong, S. Pipeline burst-related ground stability in blowout condition. Transp. Geotech. 2021, 29, 100587. [Google Scholar] [CrossRef]
- Hu, X.; Han, Y.; Yu, B.; Geng, Z.; Fan, J. Novel leakage detection and water loss management of urban water supply network using multiscale neural networks. J. Clean. Prod. 2021, 278, 123611. [Google Scholar] [CrossRef]
- Fu, H.; Wang, S.; Ling, K. Detection of two-point leakages in a pipeline based on lab investigation and numerical simulation. J. Pet. Sci. Eng. 2021, 204, 108747. [Google Scholar] [CrossRef]
- Martin, G.; Dimopoulos, J. Acoustic Emission Monitoring as a Tool in Risk Based Assessments. In Proceedings of the 12th A-PCNDT 2006—Asia-Pacific Conference on NDT, Auckland, New Zealand, 5–10 November 2006. [Google Scholar]
- Sang Hyun, K. Development of multiple leakage detection method for a reservoir pipeline valve system. Water Resour. Manag. 2018, 32, 2099–2112. [Google Scholar]
- Liu, J.; Wang, J.; Liu, S.; Qian, X. Feature extraction and identification of leak acoustic signal in water supply pipelines using correlation analysis and Lyapunov exponent. Vibroeng. Procedia 2018, 19, 182–187. [Google Scholar] [CrossRef]
- Ariaratnam, S.T.; Chandrasekaran, M. Development of an Innovative Free-Swimming Device for Detection of Leaks in Oil and Gas Pipelines. In Proceedings of the Construction Research Congress 2010, Banff, AB, Canada, 8–10 May 2010; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2010. [Google Scholar]
- Zaman, D.; Tiwari, M.K.; Gupta, A.K.; Sen, D. A review of leakage detection strategies for pressurised pipeline in steady-state. Eng. Fail. Anal. 2020, 109, 104264. [Google Scholar] [CrossRef]
- Liu, C.; Li, Y.; Meng, L.; Wang, W.; Zhang, F. Study on leak-acoustics generation mechanism for natural gas pipelines. J. Loss Prev. Process. Ind. 2014, 32, 174–181. [Google Scholar] [CrossRef]
- Kostowski, W.; Skorek, J. Real gas flow simulation in damaged distribution pipelines. Energy 2012, 45, 481–488. [Google Scholar] [CrossRef]
- Baokun, H.; Xiyang, L.; Bing, L.; Huaiqian, B.; Xiangguang, J. Study on acoustic source characteristics of gas pipeline leakage. Noise Vib. Worldw. 2019, 50, 67–77. [Google Scholar] [CrossRef]
- Yuan, F.; Zeng, Y.; Luo, R.; Khoo, B.C. Numerical and experimental study on the generation and propagation of negative wave in high-pressure gas pipeline leakage. J. Loss Prev. Process. Ind. 2020, 65, 104129. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, L.; Liang, W. Acoustic detection technology for gas pipeline leakage. Process. Saf. Environ. Prot. 2013, 91, 253–261. [Google Scholar] [CrossRef]
- El Masri, M.S.; El Gamal, H.A.; Attia, E.M. Mathematical modeling of leak detection in pipelines conveying fluids. Int. J. Eng. Res. Technol. 2015, 4, 149–159. [Google Scholar]
- Yan, J.; Liu, J.; Zhang, J. Analysis of the acoustic propagation characteristics for leakage detection in buried pipeline. J. Vib. Shock 2012, 31, 127–131. [Google Scholar]
- Yang, L.; Zhang, L.; Gao, S. Characteristics of leakage acoustic signal in water supply pipeline. J. Shenyang Univ. Technol. 2011, 33, 183–187. [Google Scholar]
- Giustolisi, O.; Savic, D.; Kapelan, Z. Pressure-driven demand and leakage simulation for water distribution networks. J. Hydraul. Eng. 2008, 134, 626–635. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Wen, Y. Leakage acoustic signal in water supply pipeline and its propagation characteristics. Acoust. Technol. 2007, 26, 871–876. [Google Scholar]
- Abhulimen, K.; Susu, A. Modelling complex pipeline network leak detection systems. Process. Saf. Environ. Prot. 2007, 85, 579–598. [Google Scholar] [CrossRef]
- Dayou, M. Fundamental of Modern Acoustics [M]; Science Press: Beijing, China, 2004; pp. 80–85. [Google Scholar]
- Lighthill, M.J. On sound generated aerodynamically, I. General theory. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1952, 211, 564–587. [Google Scholar]
- Zhang, F.; Li, Y.; Zhou, Y.; Liu, M.; Huang, L.; Cao, C. Pipeline for Simulating Leak Noise Signals and Noise Signal Online Collection Device Thereof. CN Patent 1,081,955,25B, 25 October 2019. [Google Scholar]
- Zhou, Y.; Zhang, F.; Li, Y.; Liu, M.; Hu, R.; Cao, C.; Huang, L. Pipeline State Detector. CN Patent 2,079,754,87U, 16 October 2018. [Google Scholar]
- Zhou, Y.; Li, Y.; Zhang, F.; Cao, C.; Liu, M.; Huang, L. Moving Object Position Mark Ware in Fluid Pipeline. CN Patent 2,079,765,87U, 16 October 2018. [Google Scholar]
- Mohanty, S.; Gupta, K.K.; Raju, K.S. Hurst based vibro-acoustic feature extraction of bearing using EMD and VMD. Measurement 2018, 117, 200–220. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhou, Y.; Fu, M.; Zhou, F.; Chi, Z.; Wang, W. Analysis of Propagation and Distribution Characteristics of Leakage Acoustic Waves in Water Supply Pipelines. Sensors 2021, 21, 5450. https://doi.org/10.3390/s21165450
Li Y, Zhou Y, Fu M, Zhou F, Chi Z, Wang W. Analysis of Propagation and Distribution Characteristics of Leakage Acoustic Waves in Water Supply Pipelines. Sensors. 2021; 21(16):5450. https://doi.org/10.3390/s21165450
Chicago/Turabian StyleLi, Yunfei, Yang Zhou, Ming Fu, Fan Zhou, Zhaozhao Chi, and Weihao Wang. 2021. "Analysis of Propagation and Distribution Characteristics of Leakage Acoustic Waves in Water Supply Pipelines" Sensors 21, no. 16: 5450. https://doi.org/10.3390/s21165450
APA StyleLi, Y., Zhou, Y., Fu, M., Zhou, F., Chi, Z., & Wang, W. (2021). Analysis of Propagation and Distribution Characteristics of Leakage Acoustic Waves in Water Supply Pipelines. Sensors, 21(16), 5450. https://doi.org/10.3390/s21165450