
Vision-Less Sensing for Autonomous Micro-Drones †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Related Works
1.2. Motivation
- Obstacle detection: this property is required for detecting hazards while flying and acting accordingly.
- Path planning: smart planning of the flying path is crucial for the drone resource saving and mission efficiency.
- Mapping: allowing the micro-drone to map and learn its environment, in a way that the next mission can benefit from information the drone has acquired in the last one; moreover, this info can be shared between drones.
- Communicate with others: allowing drones to share information and perform calibrated missions.
1.3. Our Contribution
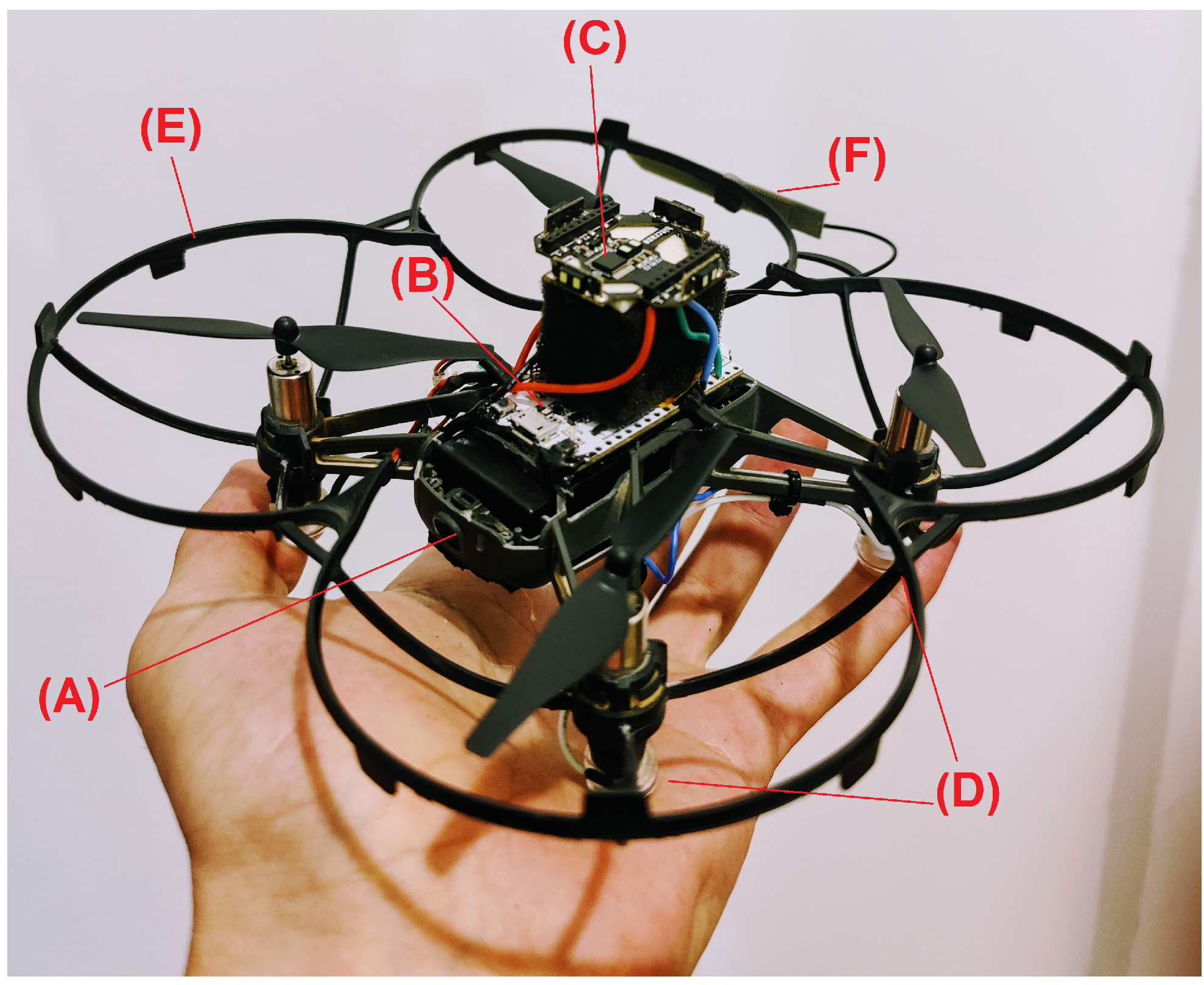
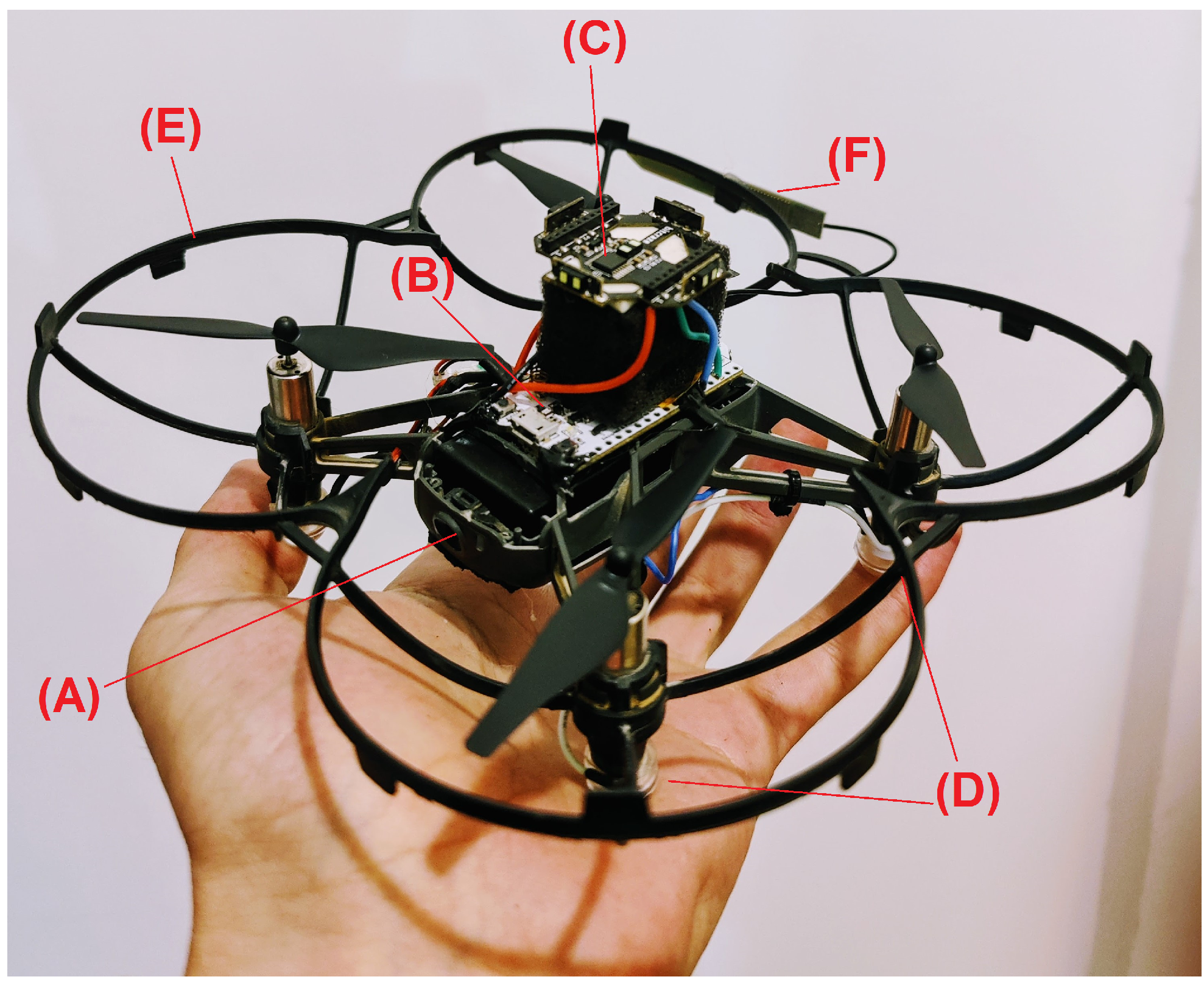
2. BAT Modeling Hardware
2.1. Tello Drone
2.2. Companion Hardware
2.2.1. MicroController
2.2.2. Multi-Ranger LiDAR Deck
2.2.3. LEDs
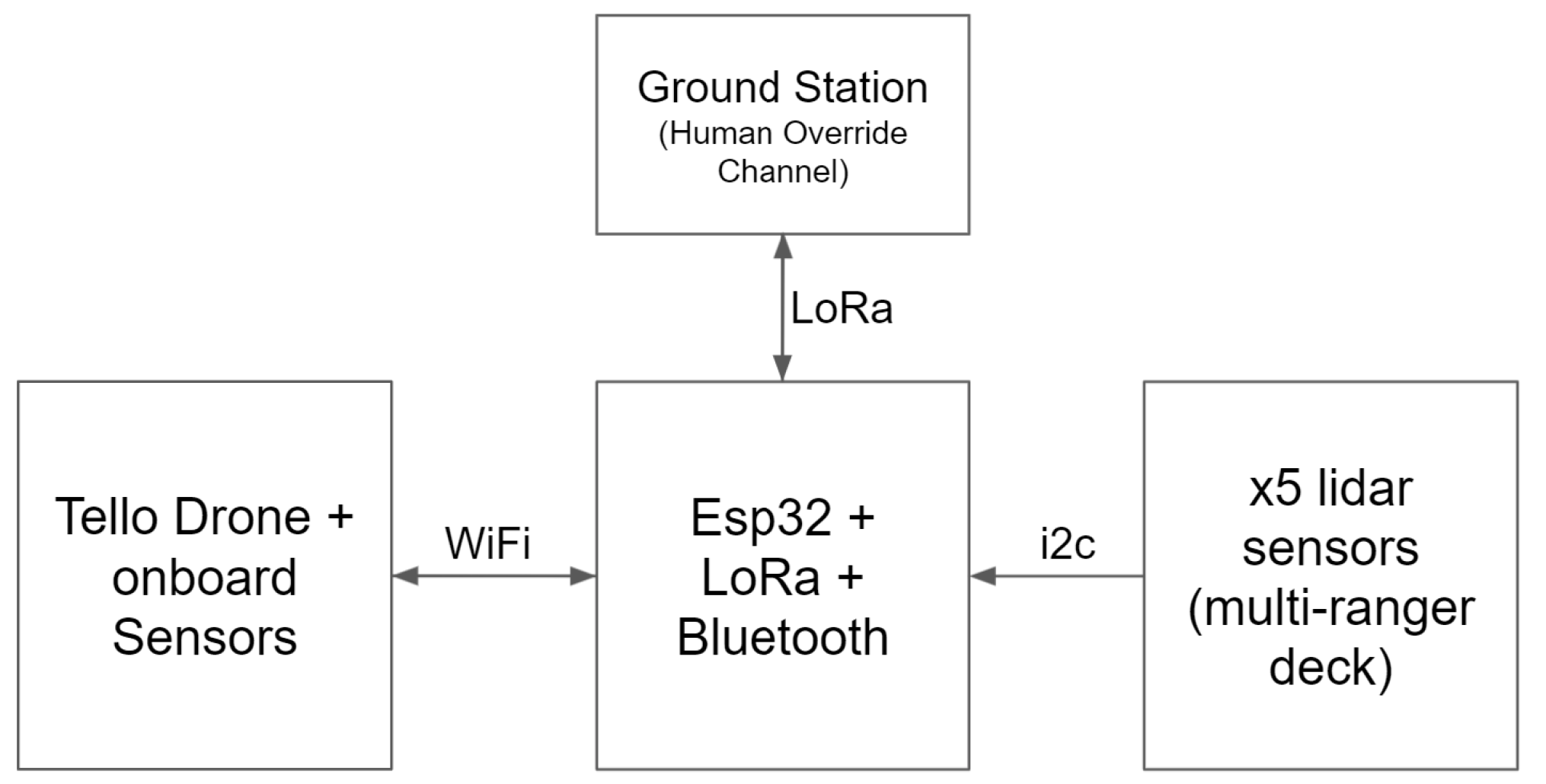
2.3. Communication
2.4. Mapping Station
2.5. Controlling API for Drones
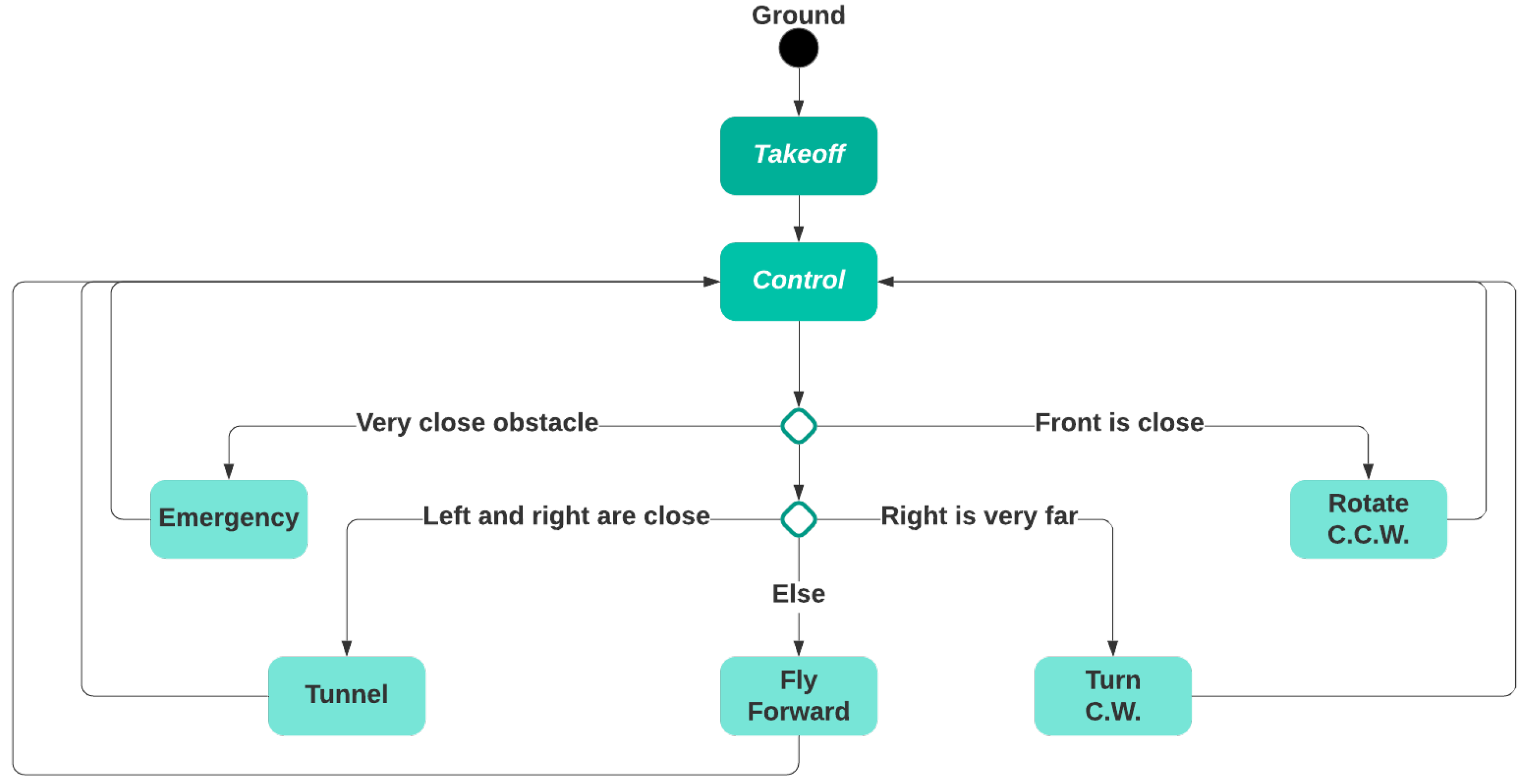
3. Controlling Algorithm
- Ground: BAT is on the ground. This is the initial state.
- Takeoff: BAT starts flying upwards and gets to a predefined altitude (e.g., 1 m).
- Control: The main control loop.
- Rotate C.C.W.: BAT slightly rotates counterclockwise (to align with the right wall).
- Emergency: BAT brakes to avoid crashing.
- Tunnel: BAT centers in between the left and right walls while maintaining the desired speed.
- Turn C.W.: BAT turns 90 degrees clockwise (to find the right wall).
- Fly Forward: BAT flies forward while making minor adjustments to maintain predefined bounds, i.e., its distance from the right and the desired speed.
| Algorithm 1: BAT’s control loop logic |
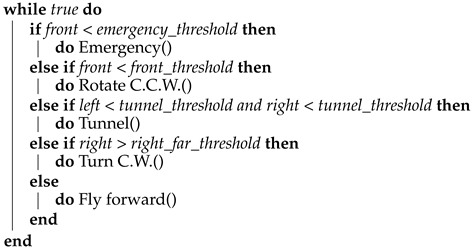 |
4. Mapping
4.1. Data
- Time: the time in seconds since the start of the mission.
- Yaw, Pitch, Roll: BAT’s orientation in degrees around the global axes y, x, and z.
- , , : the velocity relative to the global coordinate system, in m/s.
- Ranges: the range (distance) in meters from the closest object in six directions (up, down, left, right, front, and back) with respect to BAT’s current position and orientation. We use to denote the range to the object in front of BAT, similarly for all the other directions.
4.2. Geometrical Model
4.3. 2D
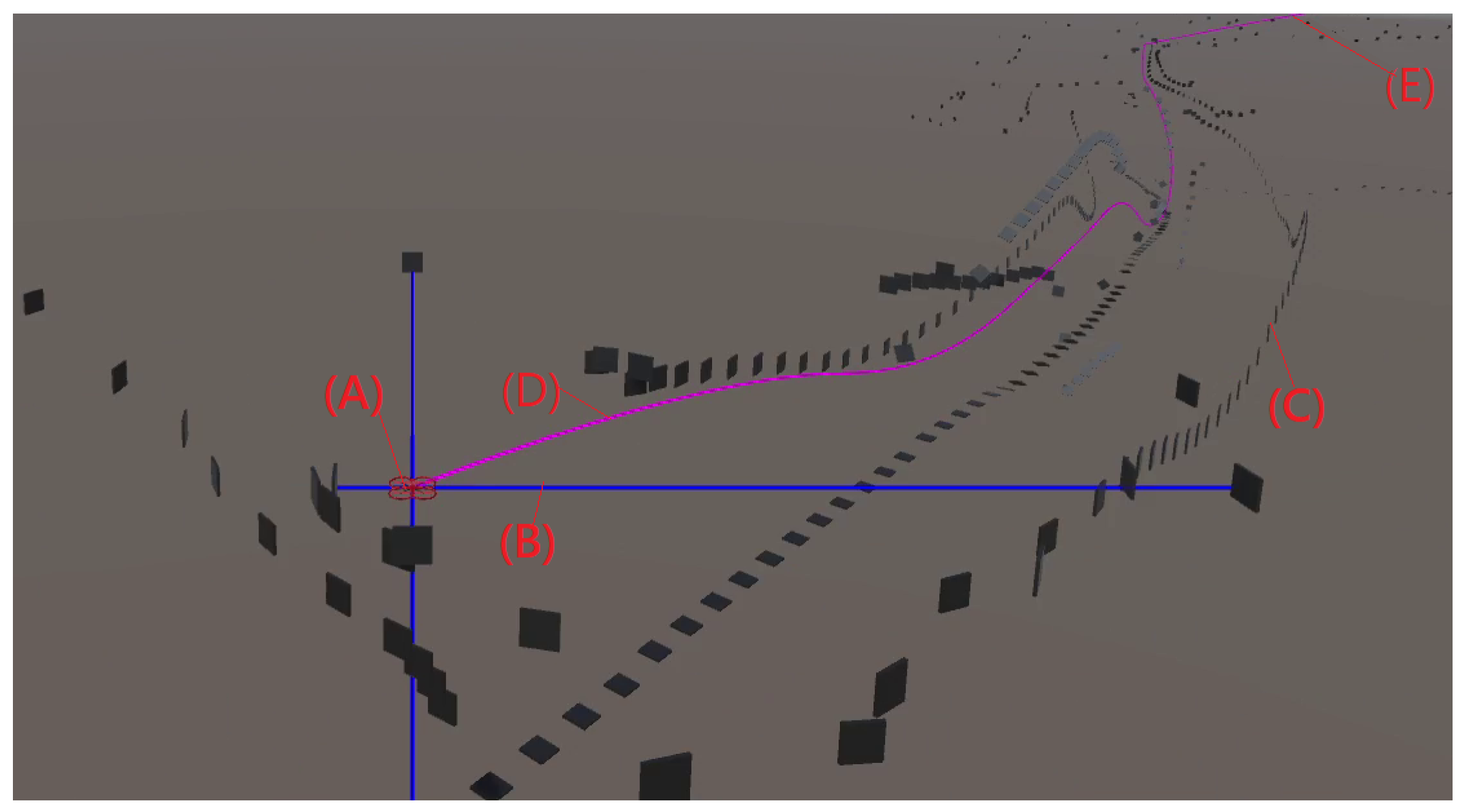
4.4. 3D
4.5. Expected Map Accuracy
- IMU: in particular the gyro measuring the yaw has an expected drift of about 1/min. Note: the pitch and the roll values are not drifting as they are measured with respect to the earth gravity with an expected accuracy better than half a degree. Due to the small size of our BAT and the use of brushed motors, the use of magnetic field sensors are unreliable and therefore are not in use in most micro-drones.
- Optical Flow: has a drift which is correlated to the light and the ground texture conditions. In most cases the error is below of the distance.
- Barometer: evaluating the relative height from the air pressure as measured by the barometer may result with a drift of up to 10 cm a minute, yet from our tests during a 10 min flight the expected attitude error is usually smaller than 30 cm.
5. Experimental Results
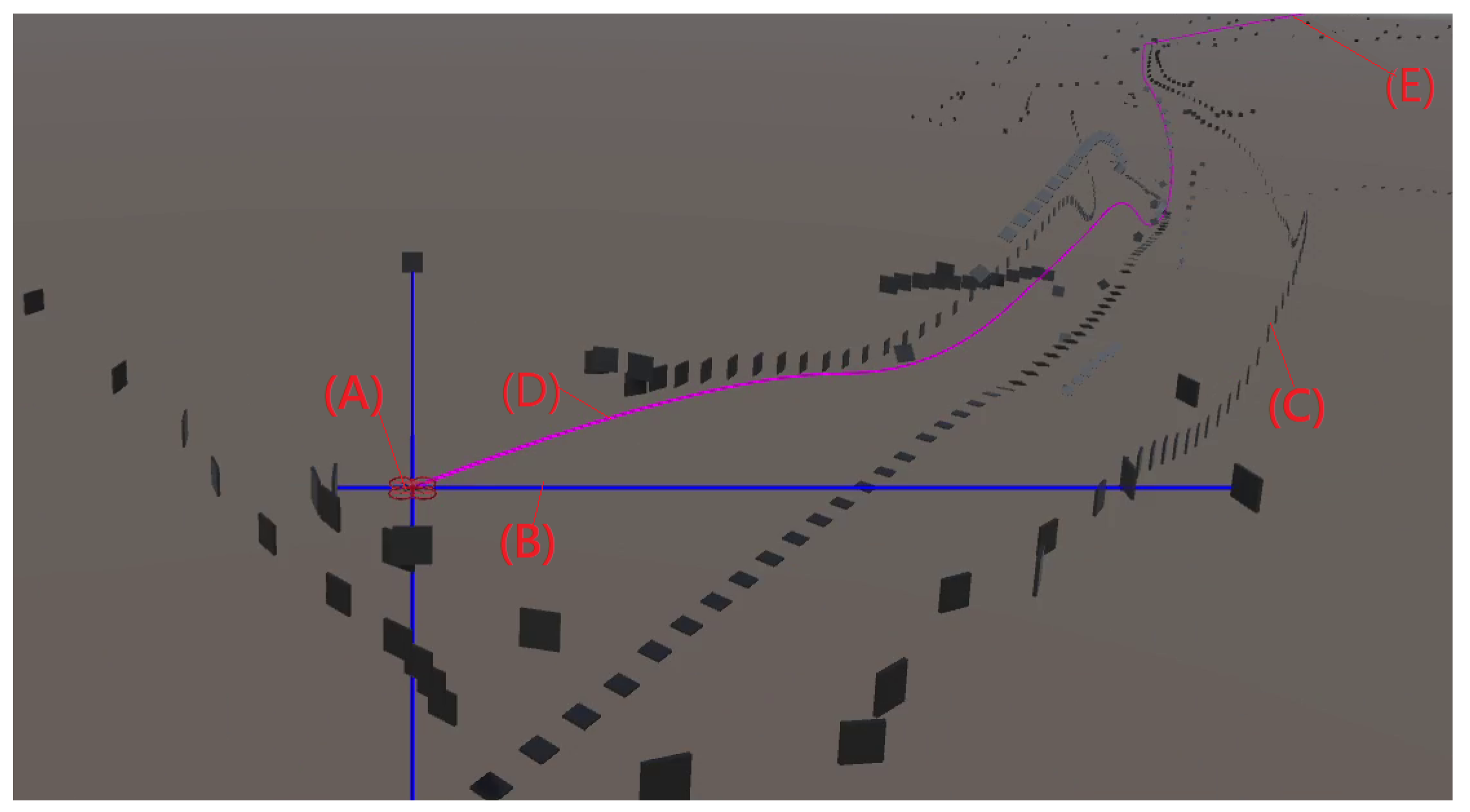
5.1. Simulation
- A modeling of the indoor environment, which includes obstacles and a starting point.
- BAT’s state, which includes its position, velocity and orientation, as well as the sensor reading, with artificially added noise.
- BAT’s autonomous flight-controlling algorithm.
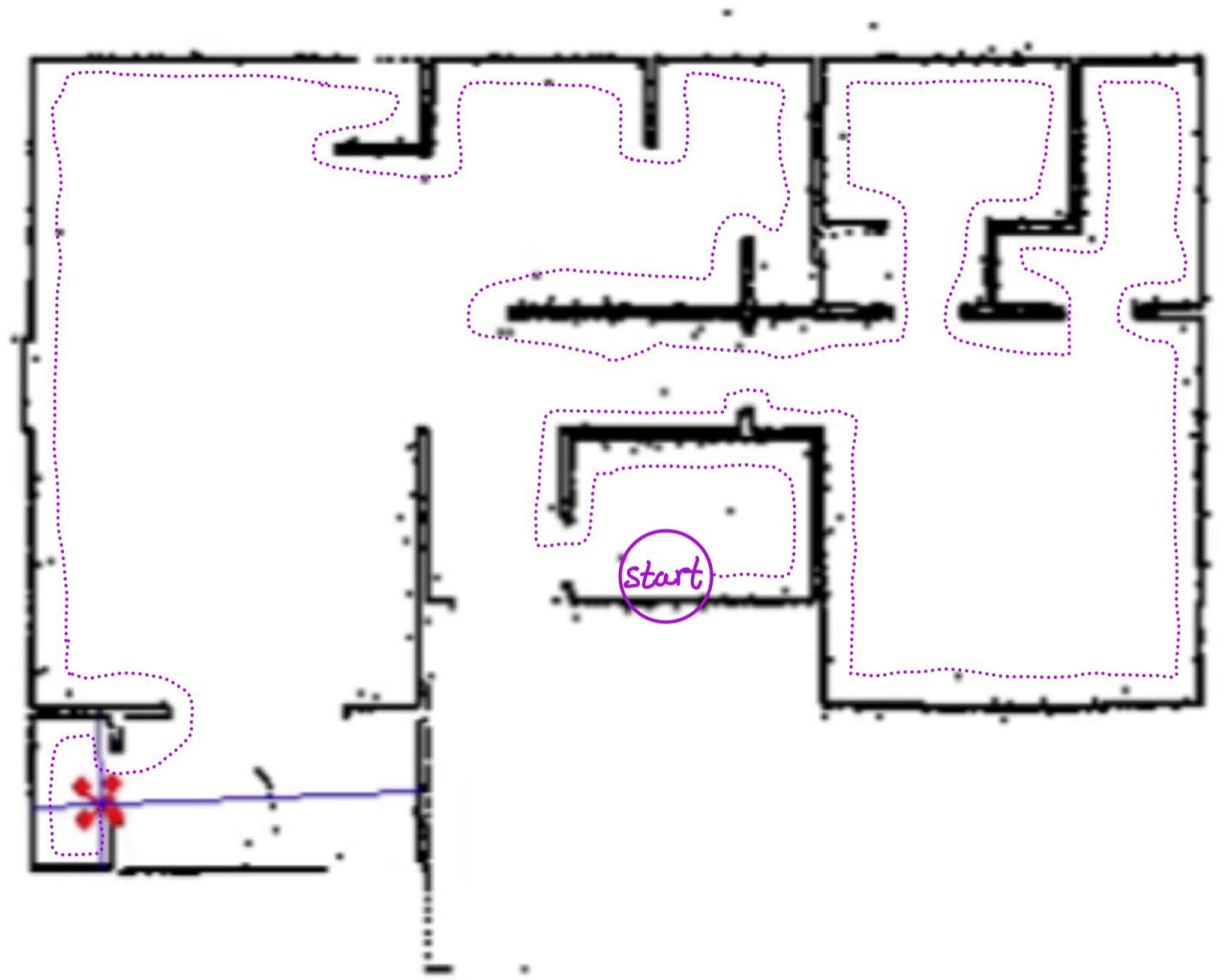
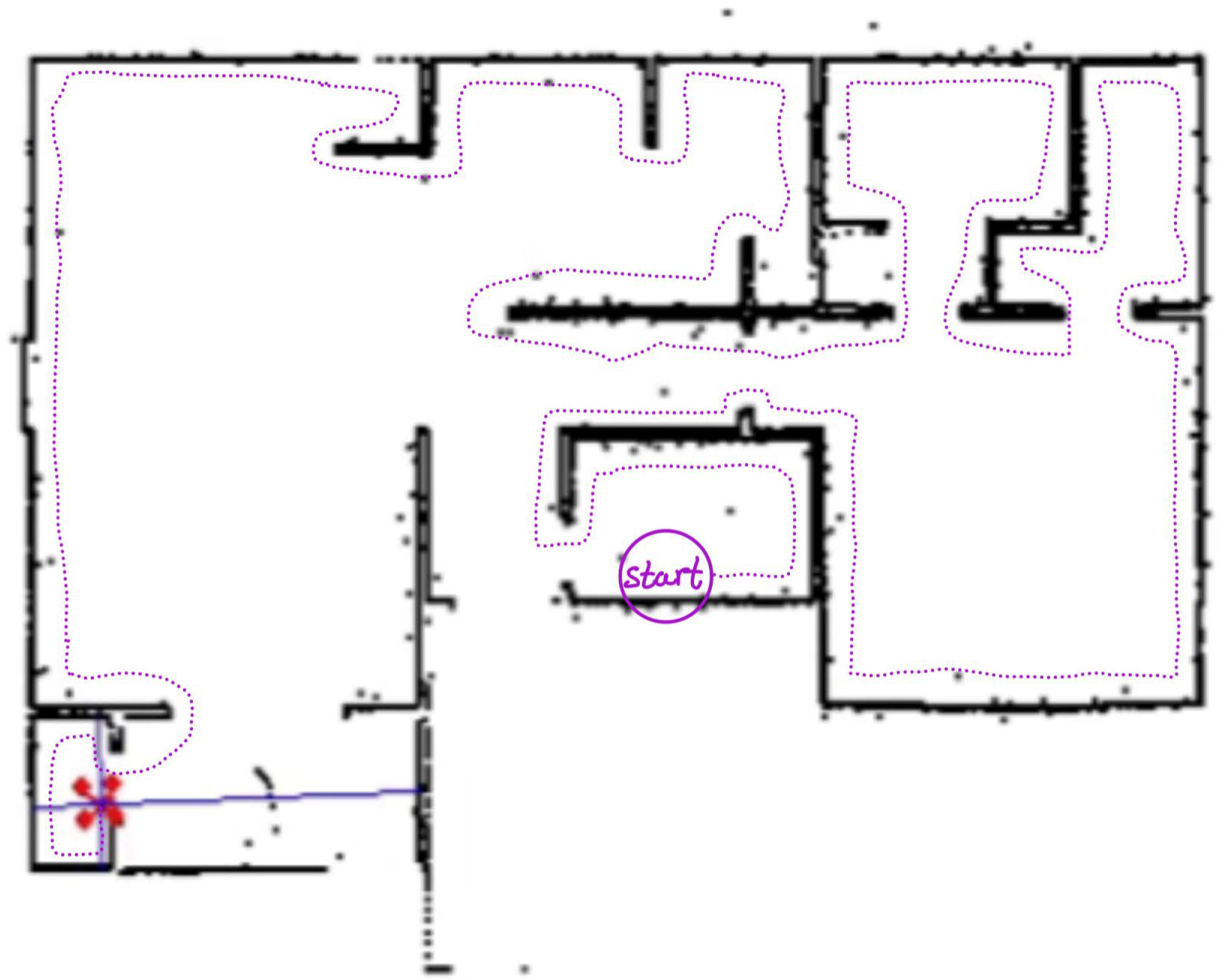
5.2. Real-World
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. LiDAR Sensor
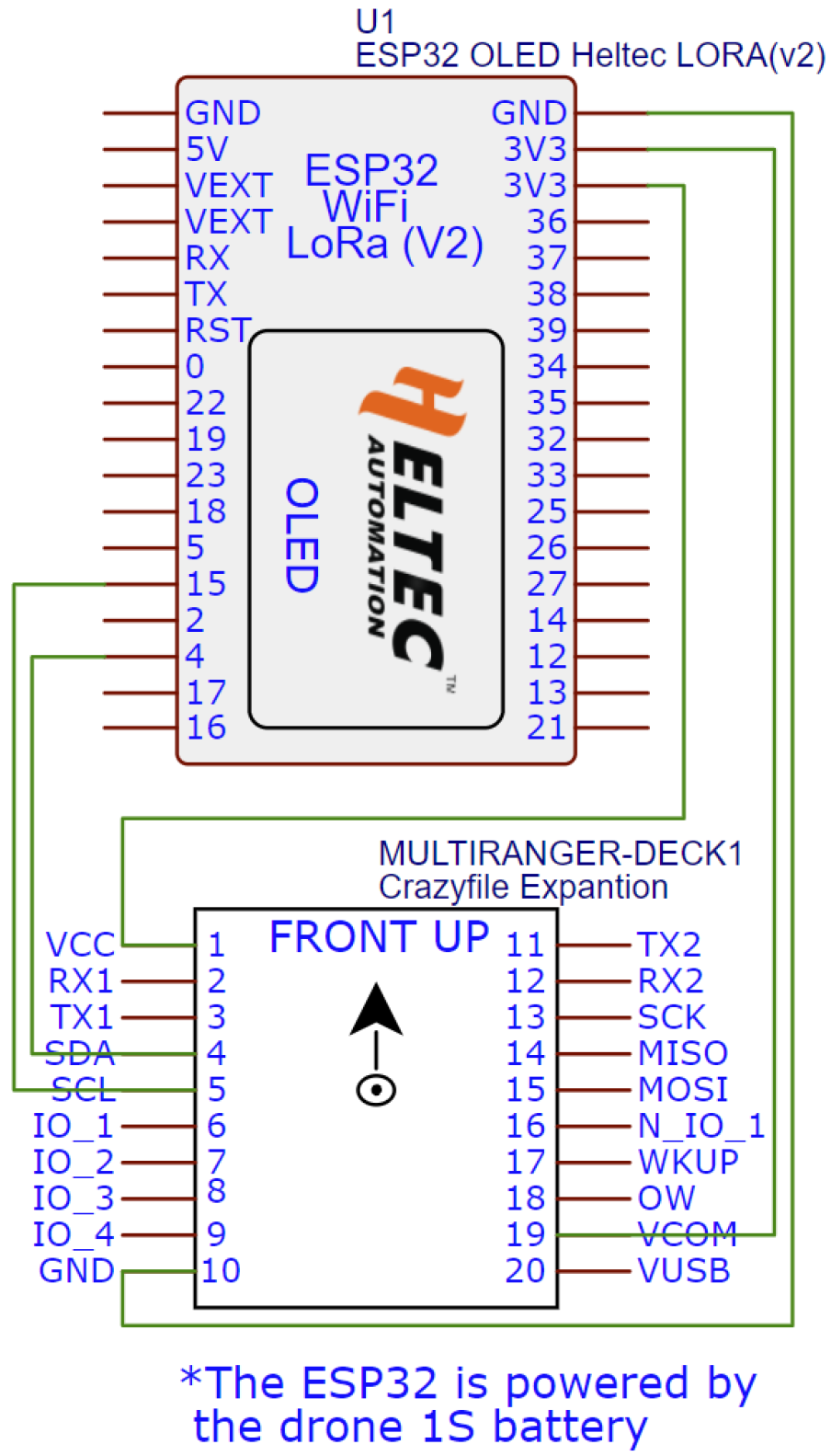
Appendix A.2. Wiring
Appendix A.3. Algorithm Constants
Appendix A.3.1. PID Values
Appendix A.3.2. Control Loop Values
- .
References
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Floreano, D.; Zufferey, J.C.; Srinivasan, M.V.; Ellington, C. Flying Insects and Robots; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Holland, R.A. Orientation and navigation in bats: Known unknowns or unknown unknowns? Behav. Ecol. Sociobiol. 2007, 61, 653–660. [Google Scholar] [CrossRef]
- Iida, F. Biologically inspired visual odometer for navigation of a flying robot. Robot. Auton. Syst. 2003, 44, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Ruffier, F.; Viollet, S.; Amic, S.; Franceschini, N. Bio-inspired optical flow circuits for the visual guidance of micro air vehicles. In Proceedings of the 2003 International Symposium on Circuits and Systems (ISCAS’03), Bangkok, Thailand, 25–28 May 2003. [Google Scholar]
- Meier, L.; Tanskanen, P.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Pollefeys, M. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Auton. Robot. 2012, 33, 21–39. [Google Scholar] [CrossRef]
- Duan, H.; Li, P. Bio-Inspired Computation in Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Aguilar, W.G.; Casaliglla, V.P.; Pólit, J.L. Obstacle avoidance based-visual navigation for micro aerial vehicles. Electronics 2017, 6, 10. [Google Scholar] [CrossRef]
- Bürkle, A.; Segor, F.; Kollmann, M. Towards autonomous micro uav swarms. J. Intell. Robot. Syst. 2011, 61, 339–353. [Google Scholar] [CrossRef]
- Hambling, D. Swarm Troopers: How Small Drones Will Conquer the World; Archangel Ink: Venice, FL, USA, 2015. [Google Scholar]
- Condliffe, J. A 100-Drone Swarm, Dropped from Jets, Plans Its Own Moves. Available online: https://www.technologyreview.com/2017/01/10/154651/a-100-drone-swarm-dropped-from-jets-plans-its-own-moves (accessed on 2 August 2021).
- Werner, D. Drone Swarm: Networks of Small UAVs Offer Big Capabilities. Available online: https://wiki.nps.edu/display/CRUSER/2013/06/20/Drone+Swarm%3A+Networks+of+Small+UAVs+Offer+Big+Capabilities (accessed on 2 August 2021).
- Miller, I.D.; Cladera, F.; Cowley, A.; Shivakumar, S.S.; Lee, E.S.; Jarin-Lipschitz, L.; Bhat, A.; Rodrigues, N.; Zhou, A.; Cohen, A.; et al. Mine tunnel exploration using multiple quadrupedal robots. IEEE Robot. Autom. Lett. 2020, 5, 2840–2847. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Catal, O.; Verbelen, T.; Hartmann, M.; Dhoedt, B. Towards bio-inspired unsupervised representation learning for indoor aerial navigation. arXiv 2021, arXiv:2106.09326. [Google Scholar]
- Rogers, J.G.; Gregory, J.M.; Fink, J.; Stump, E. Test Your SLAM! The SubT-Tunnel dataset and metric for mapping. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 955–961. [Google Scholar]
- Palossi, D.; Loquercio, A.; Conti, F.; Flamand, E.; Scaramuzza, D.; Benini, L. Ultra low power deep-learning-powered autonomous nano drones. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018), ETH Zurich, Piscataway, NJ, USA, 1–5 October 2018. [Google Scholar]
- Piyasena, D.; Lam, S.K.; Wu, M. Edge Accelerator for Lifelong Deep Learning using Streaming Linear Discriminant Analysis. In Proceedings of the 2021 IEEE 29th Annual International Symposium on Field-Programmable Custom Computing Machines (FCCM), Orlando, FL, USA, 9–12 May 2021; p. 259. [Google Scholar]
- Palossi, D.; Loquercio, A.; Conti, F.; Flamand, E.; Scaramuzza, D.; Benini, L. A 64-mW DNN-based visual navigation engine for autonomous nano-drones. IEEE Internet Things J. 2019, 6, 8357–8371. [Google Scholar] [CrossRef] [Green Version]
- Dowling, L.; Poblete, T.; Hook, I.; Tang, H.; Tan, Y.; Glenn, W.; Unnithan, R.R. Accurate indoor mapping using an autonomous unmanned aerial vehicle (UAV). arXiv 2018, arXiv:1808.01940. [Google Scholar]
- Zhang, G.; Shang, B.; Chen, Y.; Moyes, H. SmartCaveDrone: 3D cave mapping using UAVs as robotic co-archaeologists. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1052–1057. [Google Scholar]
- Li, H.; Savkin, A.V.; Vucetic, B. Autonomous area exploration and mapping in underground mine environments by unmanned aerial vehicles. Robotica 2020, 38, 442–456. [Google Scholar] [CrossRef]
- Weisz, J.; Huang, Y.; Lier, F.; Sethumadhavan, S.; Allen, P. Robobench: Towards sustainable robotics system benchmarking. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3383–3389. [Google Scholar]
- Baltazar, R.; Cervantes, A.; Zamudio, V. A Simple Wall Follower NXT Robot to Localization and Mapping in an unknown environment. In Workshop Proceedings of the 7th International Conference on Intelligent Environments; IOS Press: Amsterdam, The Netherlands, 2011; pp. 74–84. [Google Scholar]
- Willis, M. Proportional-Integral-Derivative Control. Available online: http://educypedia.karadimov.info/library/PID.pdf (accessed on 2 August 2021).
- Bosse, M.; Zlot, R. Keypoint design and evaluation for place recognition in 2D lidar maps. Robot. Auton. Syst. 2009, 57, 1211–1224. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges. IJCAI 2003, 3, 1151–1156. [Google Scholar]
- Azaria, E. BAT: Believe It or not I’m Walking on Simulated Air. Available online: https://youtu.be/tYiBW78trgM (accessed on 6 June 2021).
- Pikalov, S. BAT: Believe It or not I’m Walking on Air. Available online: https://youtu.be/AuPLlUi7e7w (accessed on 6 June 2021).
- Thrun, S.; Montemerlo, M. The graph SLAM algorithm with applications to large-scale mapping of urban structures. Int. J. Robot. Res. 2006, 25, 403–429. [Google Scholar] [CrossRef]
- PMD. Time-of-Flight (ToF). Available online: https://pmdtec.com/picofamily/ (accessed on 6 June 2021).
- Stone, P.; Sutton, R.S.; Kuhlmann, G. Reinforcement learning for robocup soccer keepaway. Adapt. Behav. 2005, 13, 165–188. [Google Scholar] [CrossRef]
- Van Hasselt, H.; Guez, A.; Silver, D. Deep reinforcement learning with double Q-learning. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016. [Google Scholar]
- Silver, D.; Huang, A.; Maddison, C.J.; Guez, A.; Sifre, L.; Van Den Driessche, G.; Schrittwieser, J.; Antonoglou, I.; Panneershelvam, V.; Lanctot, M.; et al. Mastering the game of Go with deep neural networks and tree search. Nature 2016, 529, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Monroe, W.; Ritter, A.; Galley, M.; Gao, J.; Jurafsky, D. Deep reinforcement learning for dialogue generation. arXiv 2016, arXiv:1606.01541. [Google Scholar]
- Li, Y.; Wen, Y.; Guan, K.; Tao, D. Transforming Cooling Optimization for Green Data Center via Deep Reinforcement Learning. arXiv 2017, arXiv:1709.05077. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bojarski, M.; Del Testa, D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Jackel, L.D.; Monfort, M.; Muller, U.; Zhang, J.; et al. End to end learning for self-driving cars. arXiv 2016, arXiv:1604.07316. [Google Scholar]
- Azar, A.T.; Koubaa, A.; Ali Mohamed, N.; Ibrahim, H.A.; Ibrahim, Z.F.; Kazim, M.; Ammar, A.; Benjdira, B.; Khamis, A.M.; Hameed, I.A.; et al. Drone Deep Reinforcement Learning: A Review. Electronics 2021, 10, 999. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pikalov, S.; Azaria, E.; Sonnenberg, S.; Ben-Moshe, B.; Azaria, A. Vision-Less Sensing for Autonomous Micro-Drones. Sensors 2021, 21, 5293. https://doi.org/10.3390/s21165293
Pikalov S, Azaria E, Sonnenberg S, Ben-Moshe B, Azaria A. Vision-Less Sensing for Autonomous Micro-Drones. Sensors. 2021; 21(16):5293. https://doi.org/10.3390/s21165293
Chicago/Turabian StylePikalov, Simon, Elisha Azaria, Shaya Sonnenberg, Boaz Ben-Moshe, and Amos Azaria. 2021. "Vision-Less Sensing for Autonomous Micro-Drones" Sensors 21, no. 16: 5293. https://doi.org/10.3390/s21165293
APA StylePikalov, S., Azaria, E., Sonnenberg, S., Ben-Moshe, B., & Azaria, A. (2021). Vision-Less Sensing for Autonomous Micro-Drones. Sensors, 21(16), 5293. https://doi.org/10.3390/s21165293