
Experimental and Analytical Study of under Water Pressure Wave Induced by the Implosion of a Bubble Generated by Focused Laser

 , , , ,
, , , ,
Abstract
:1. Introduction
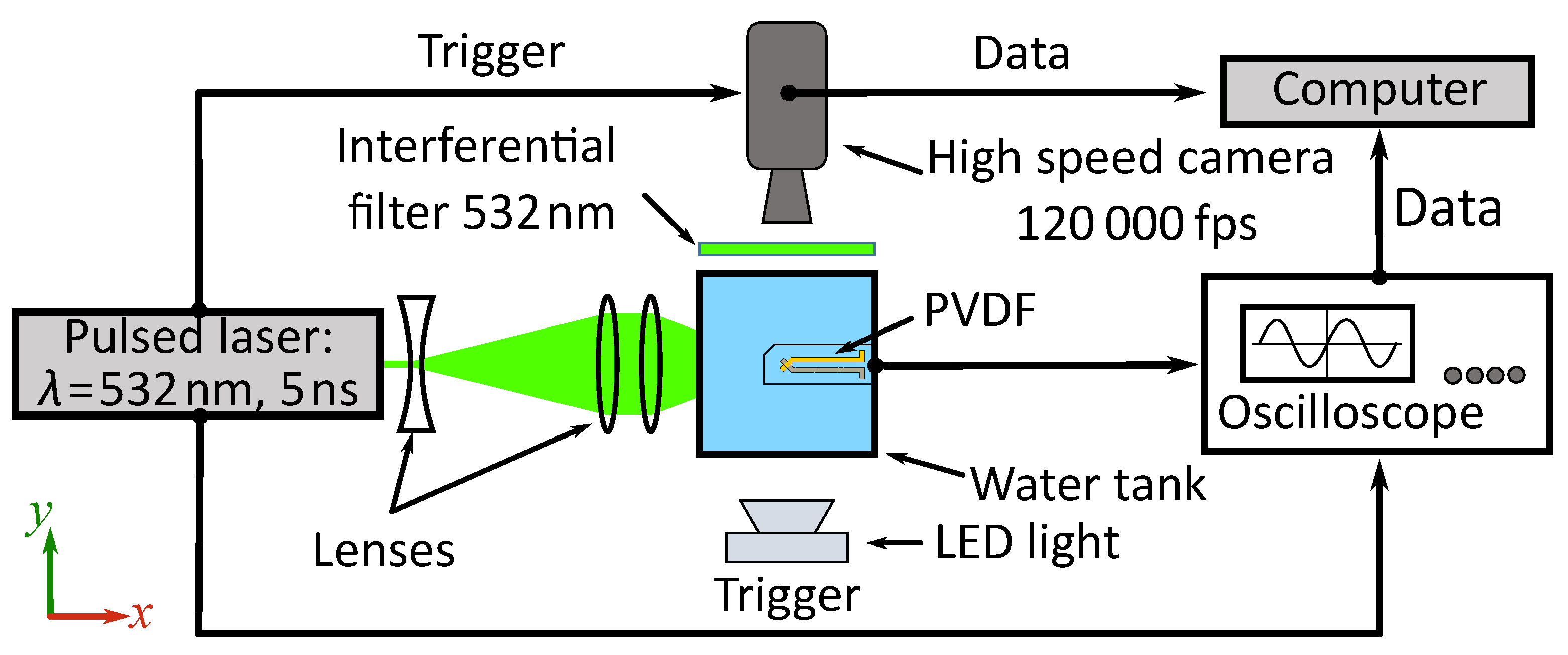
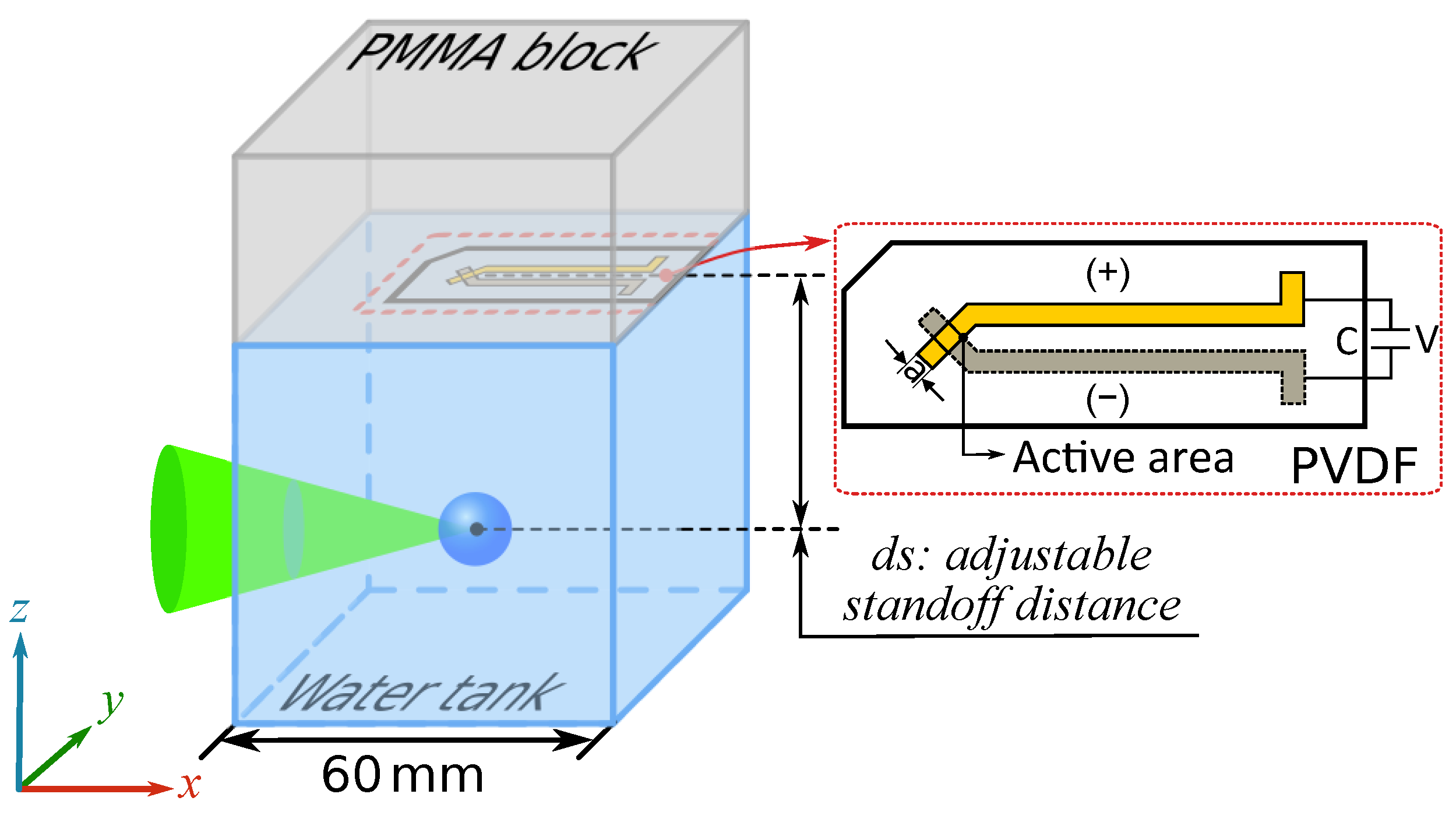
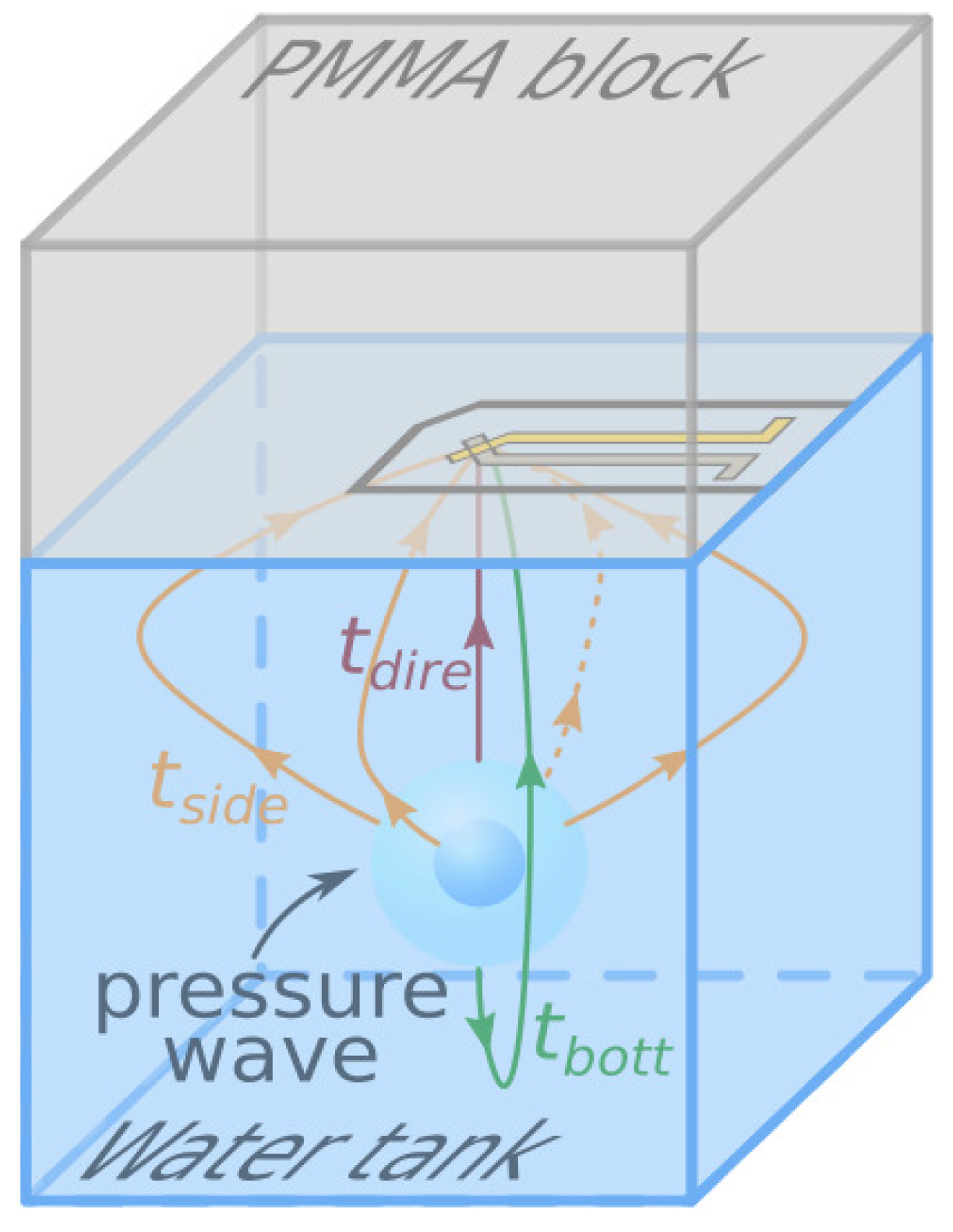
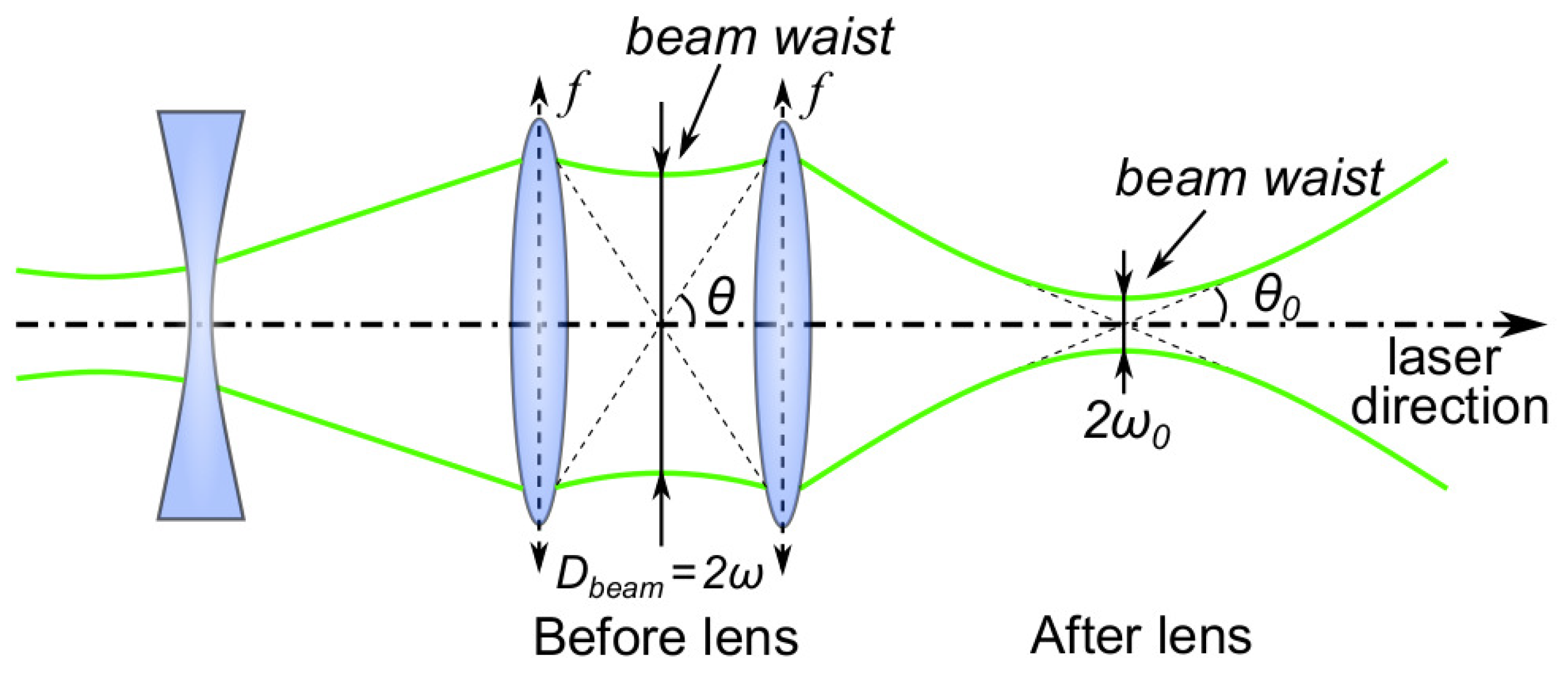
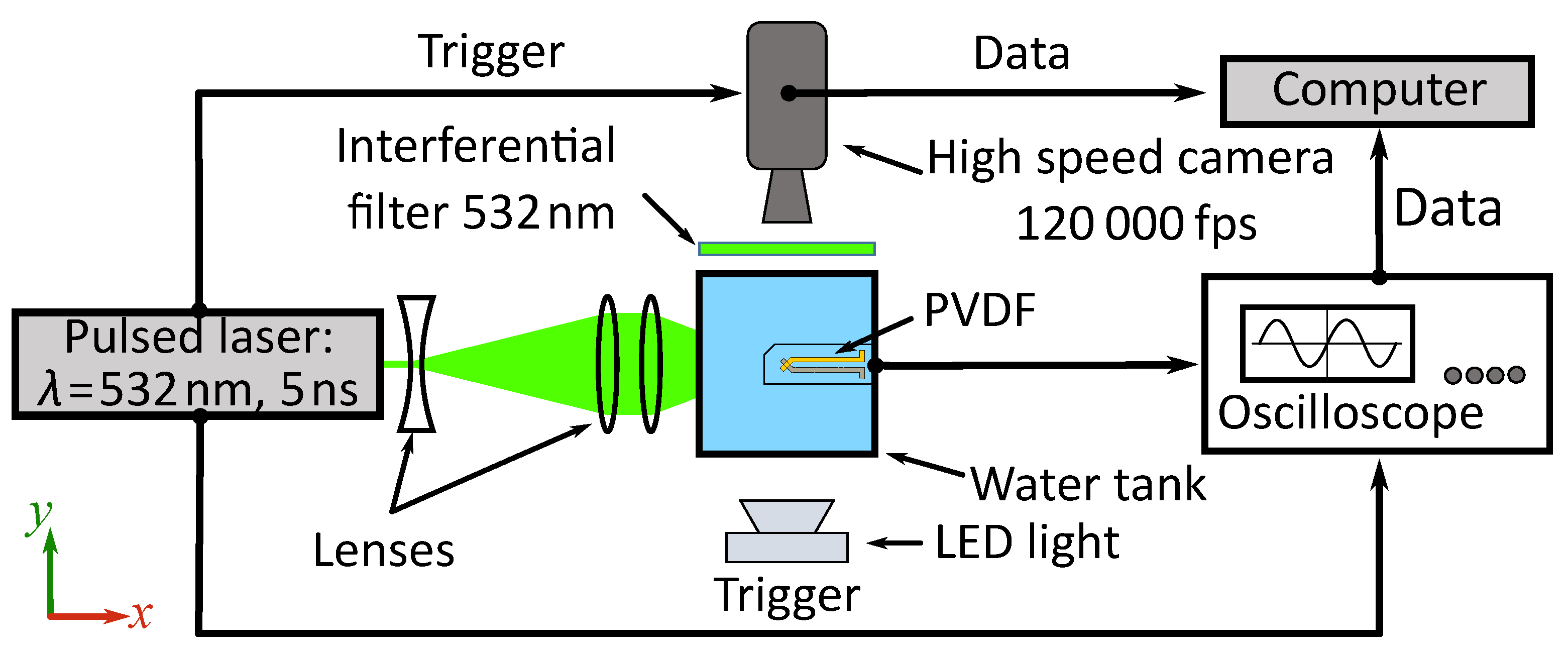
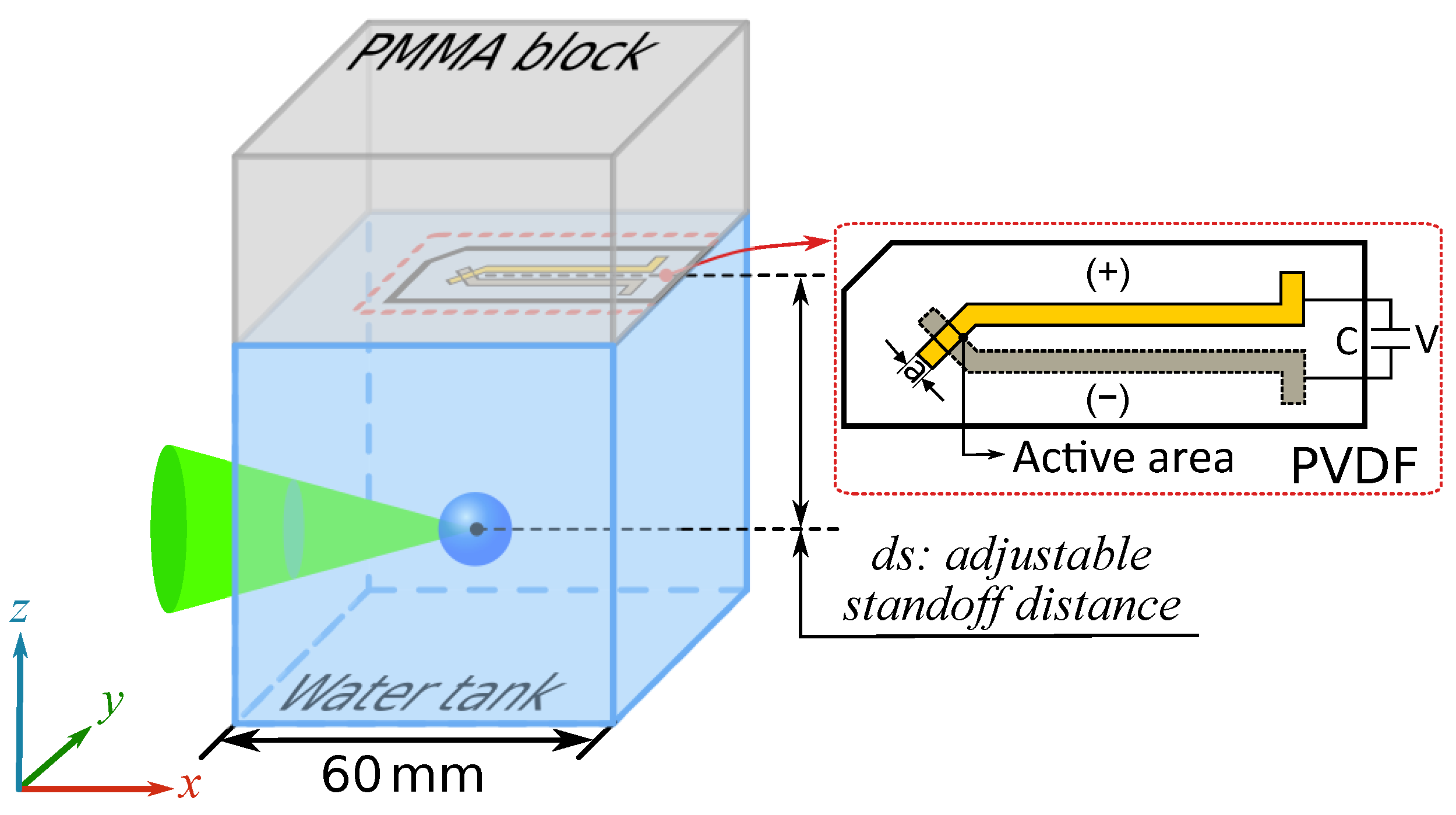
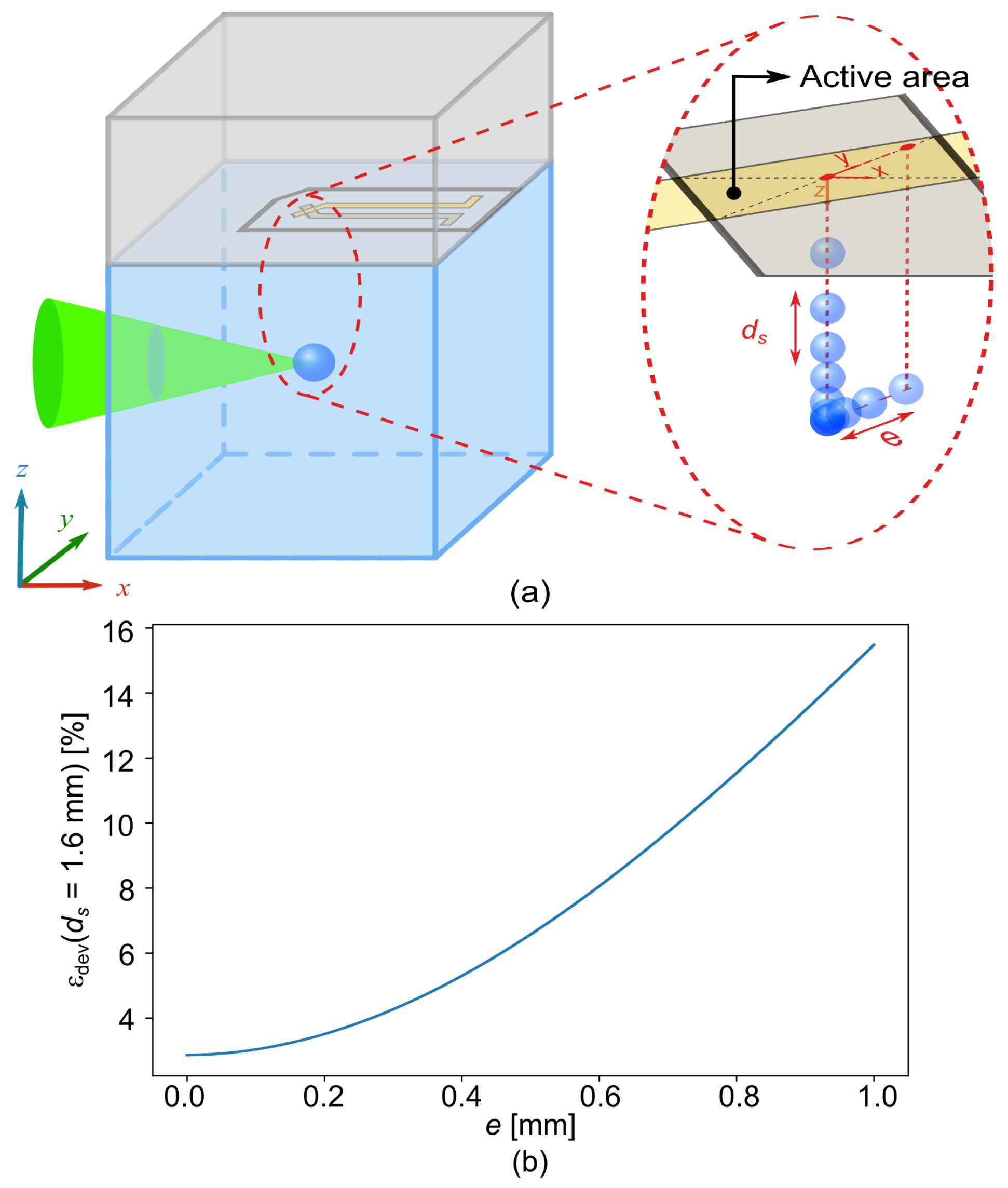
2. Experimental Set Up
3. Experimental Result
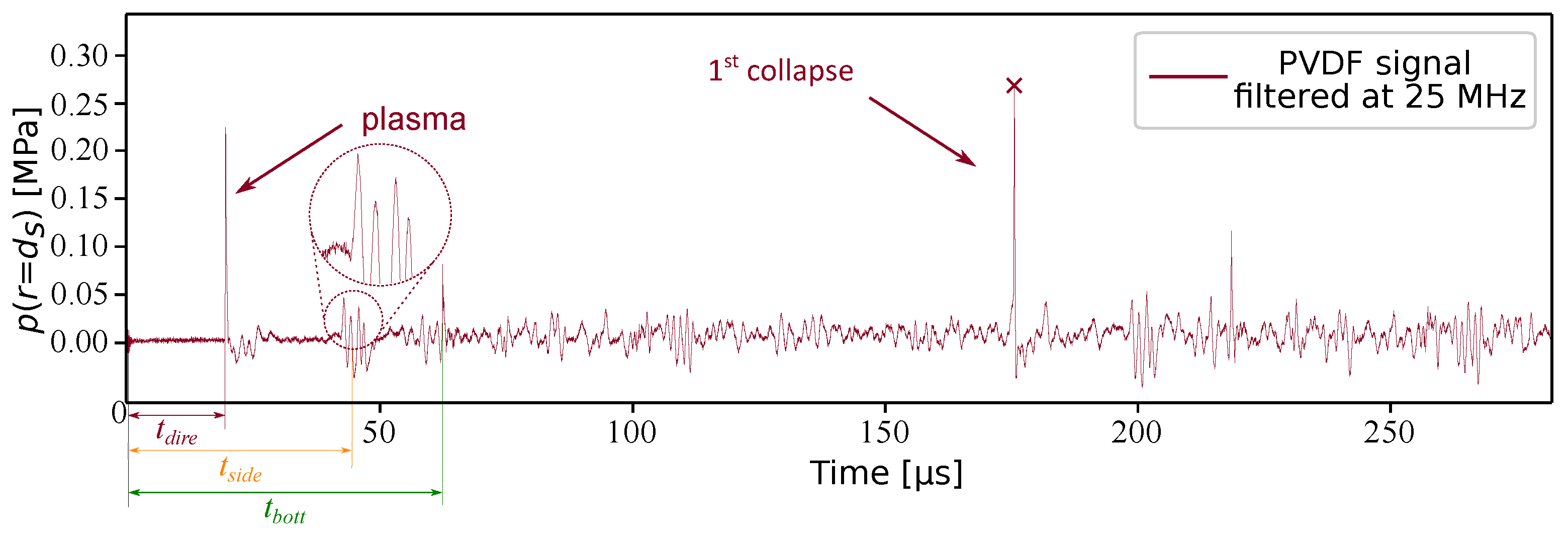
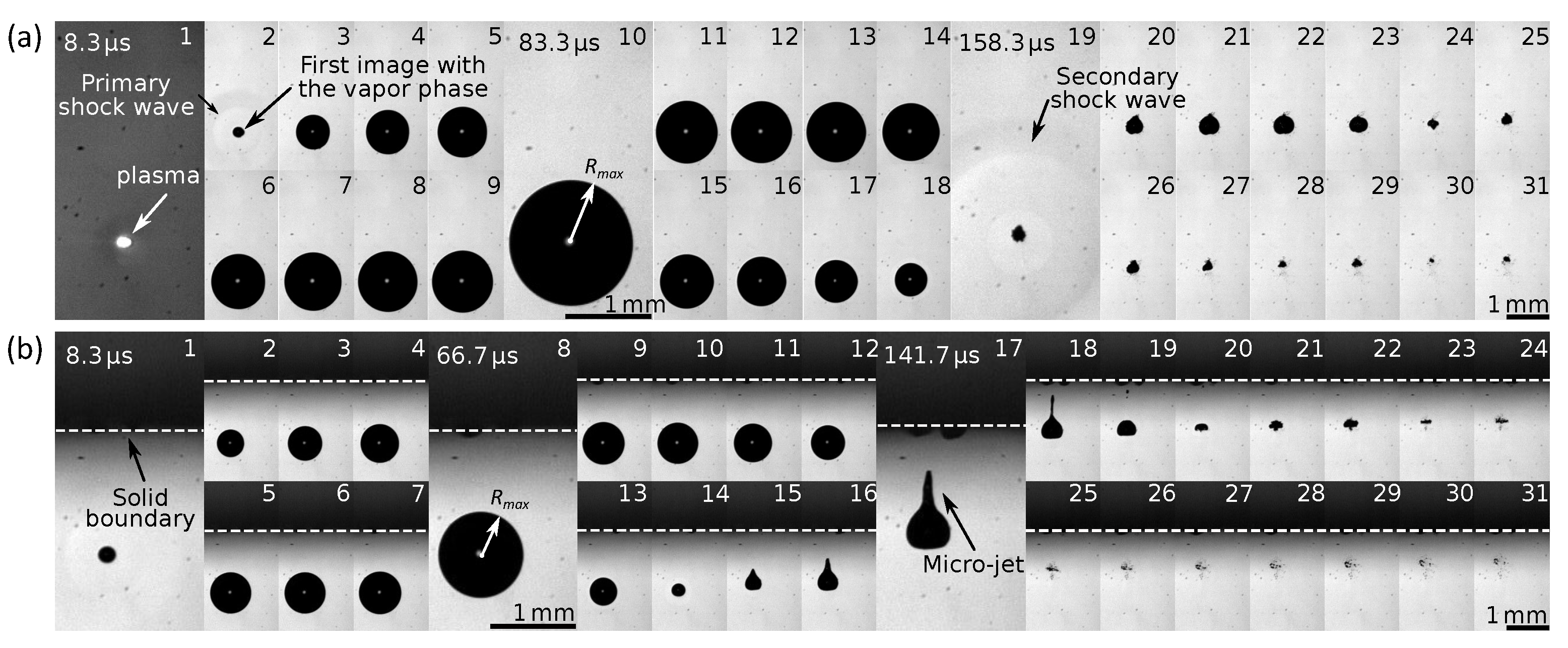
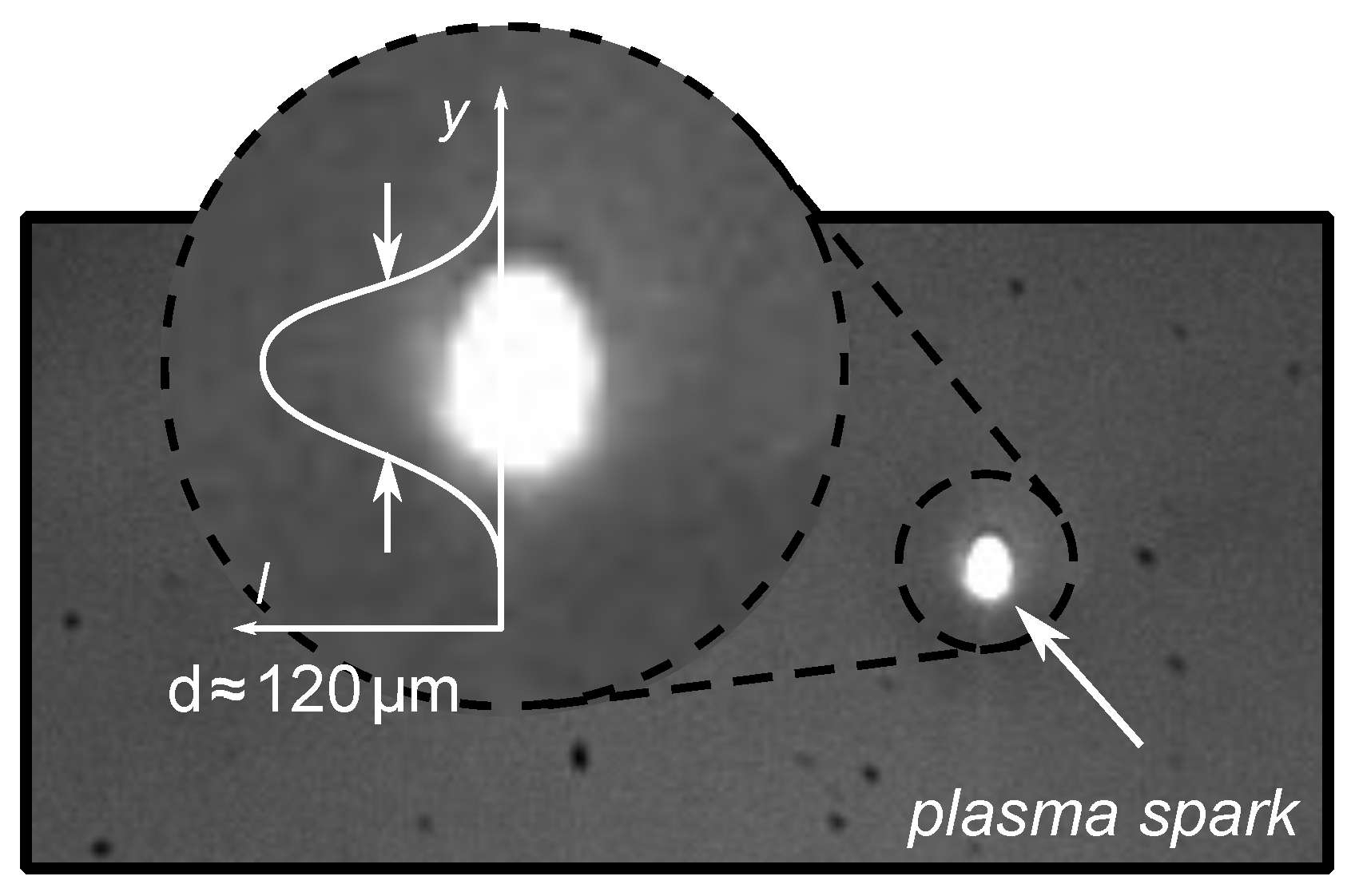
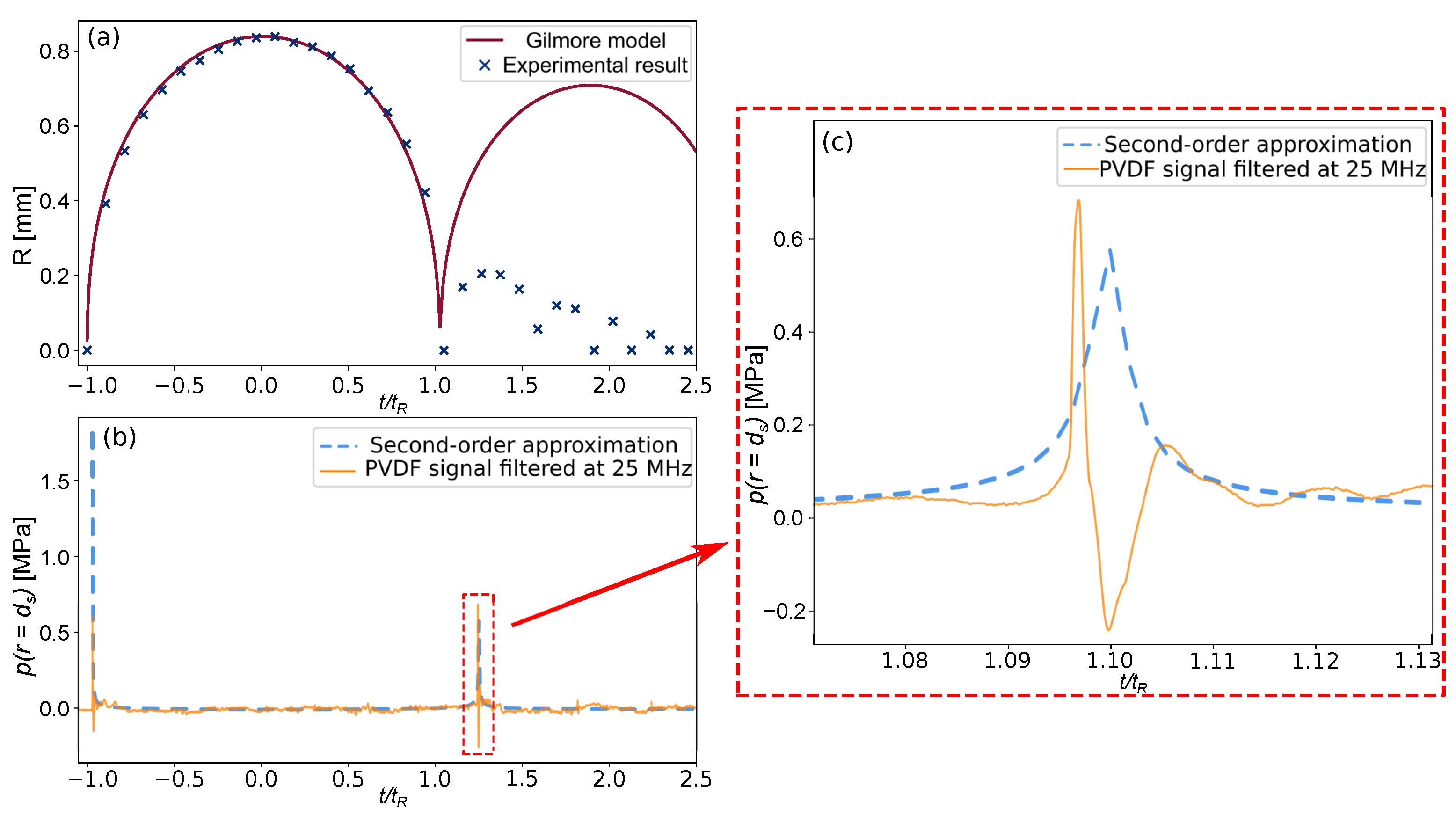
3.1. Bubble Dynamics
3.2. PVDF Signal Processing
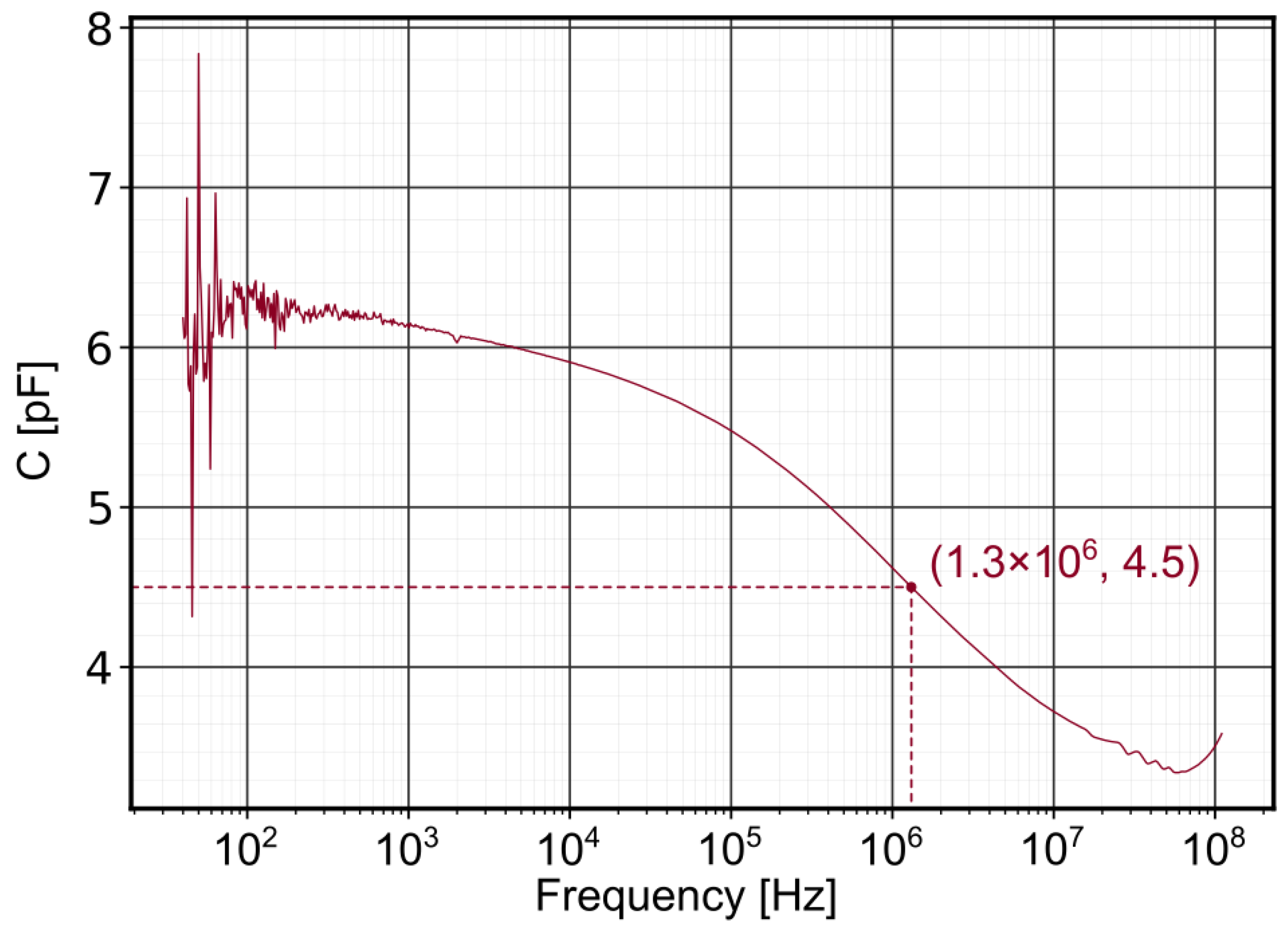
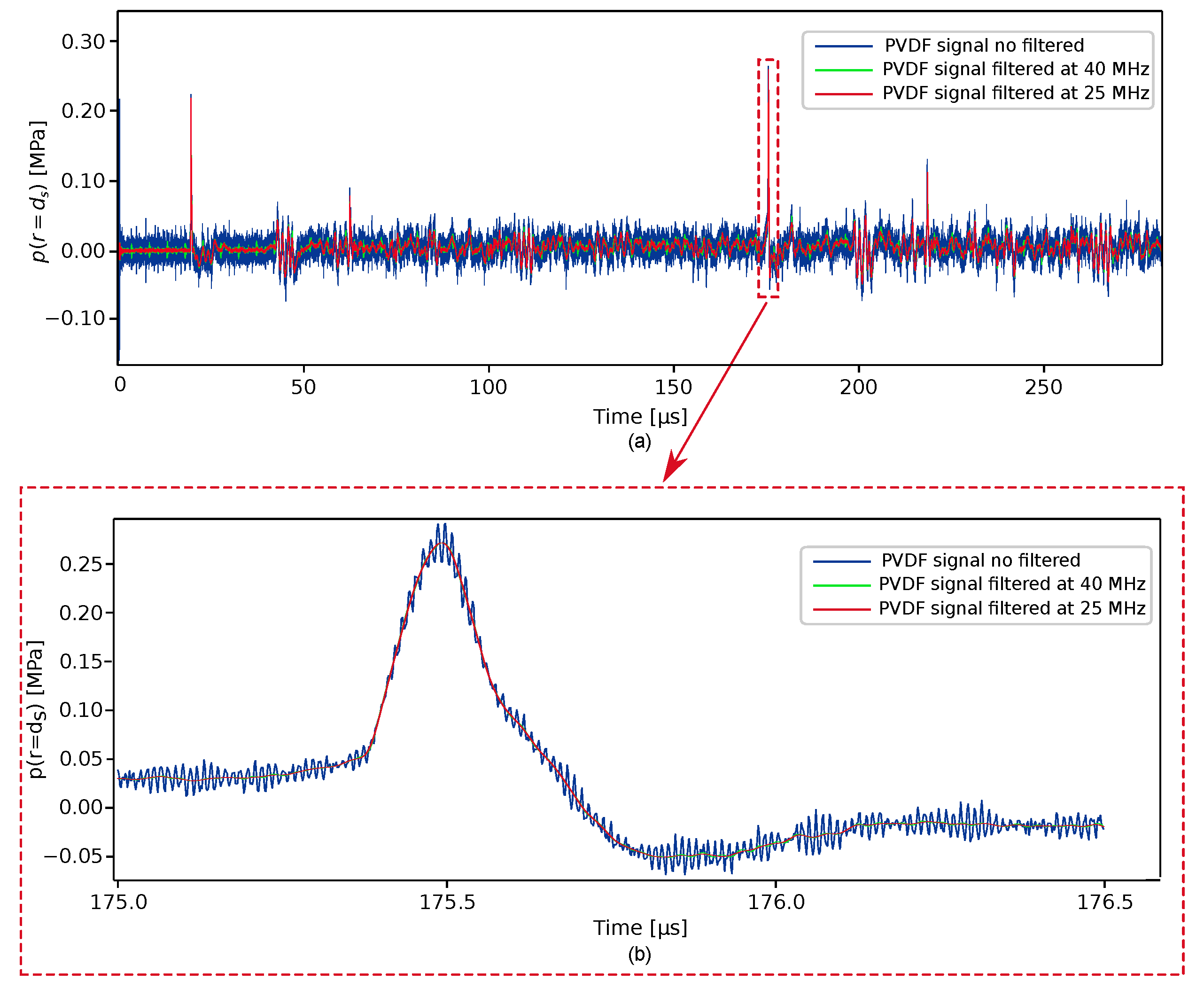
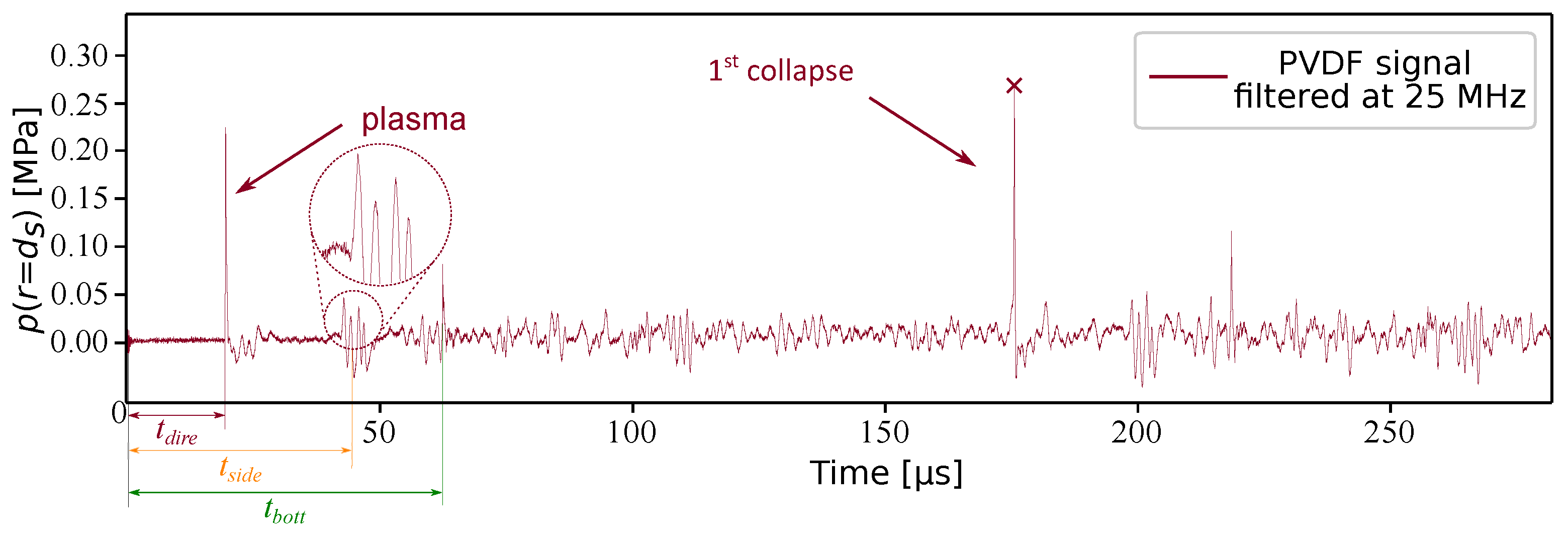
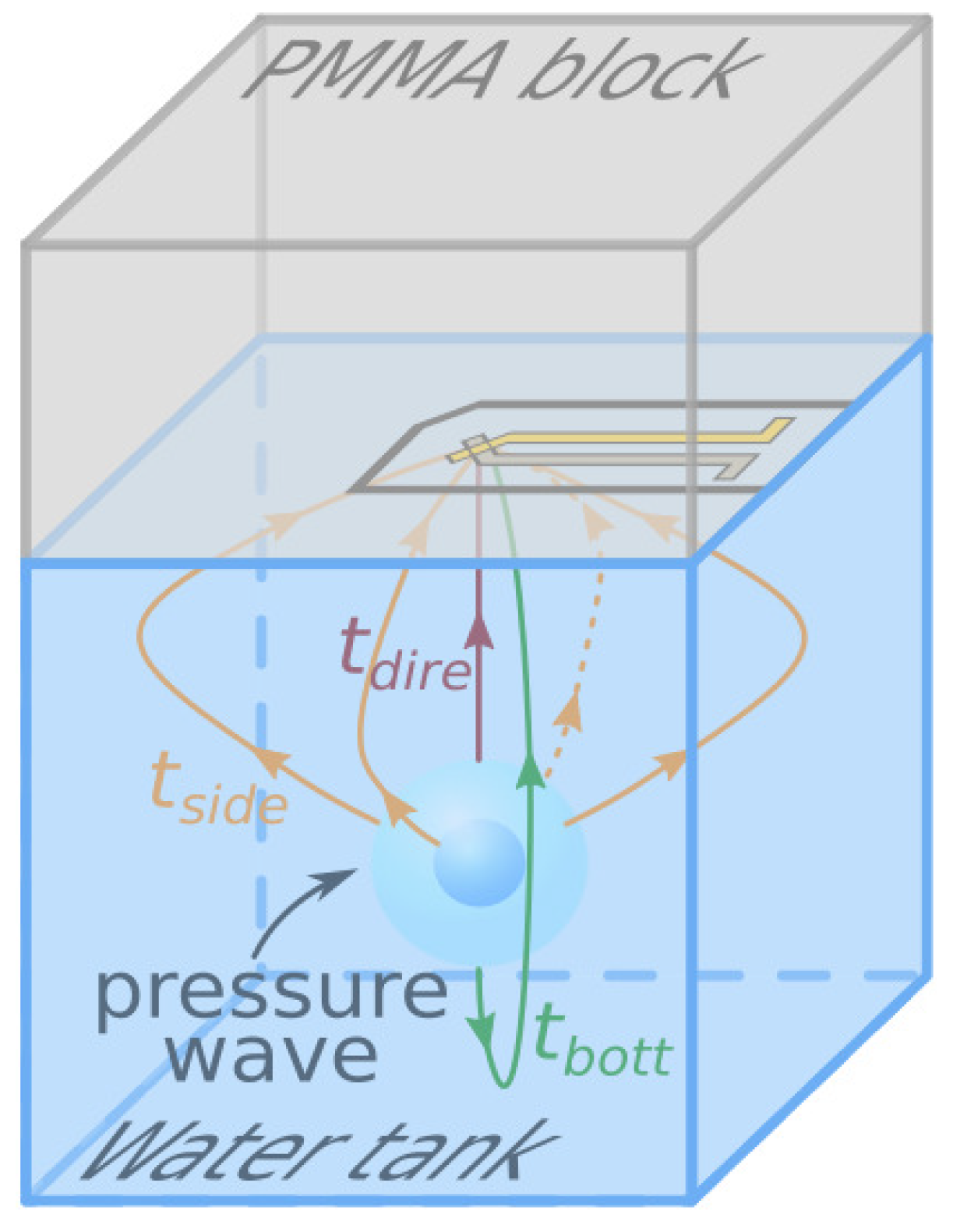
Identification the PVDF Signal
4. Analytic Comparison
4.1. Gilmore Model
4.2. Initial Conditions
4.3. Pressure Fields Throughout the Liquid: Second Order Approximation
5. Discussion
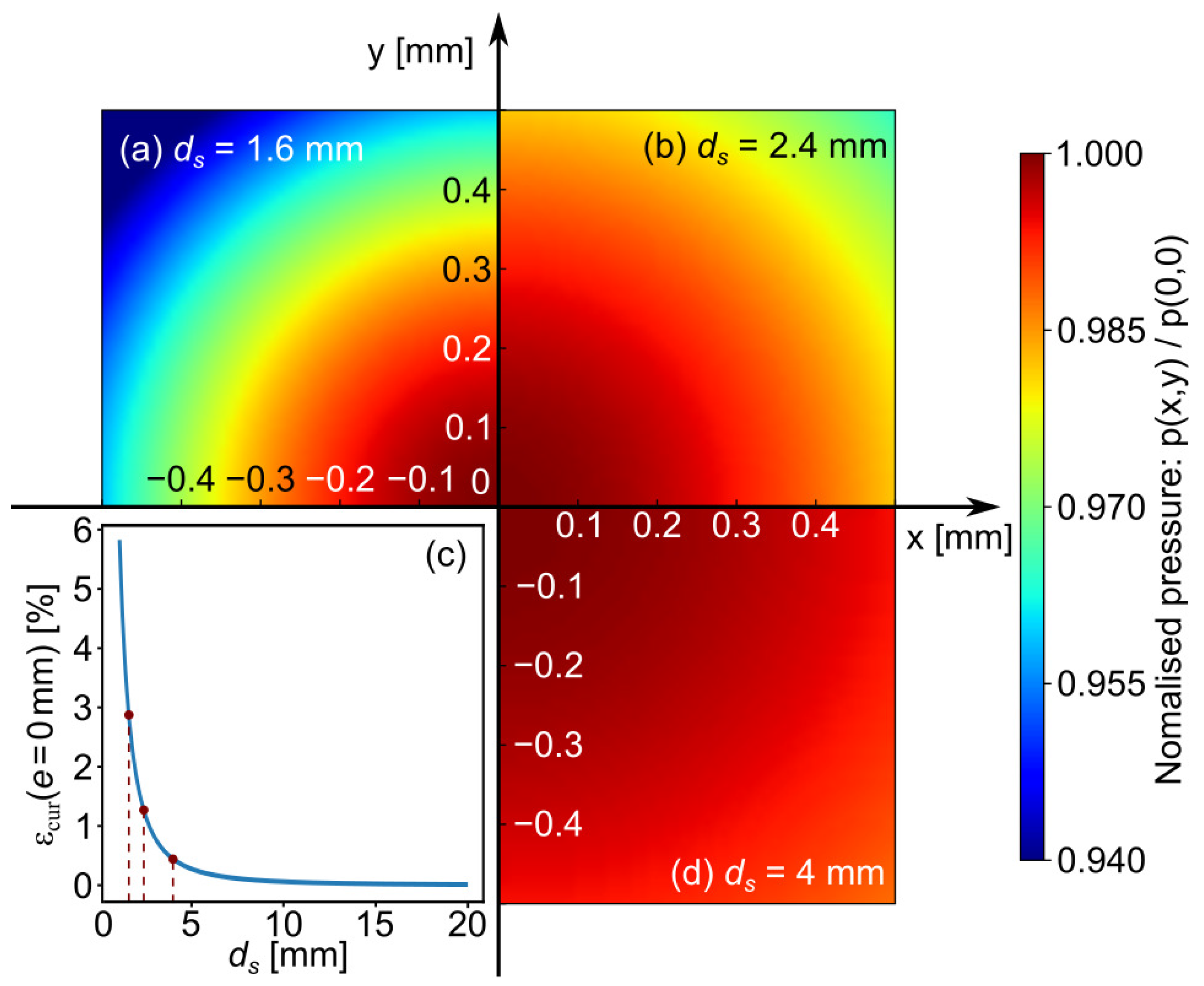
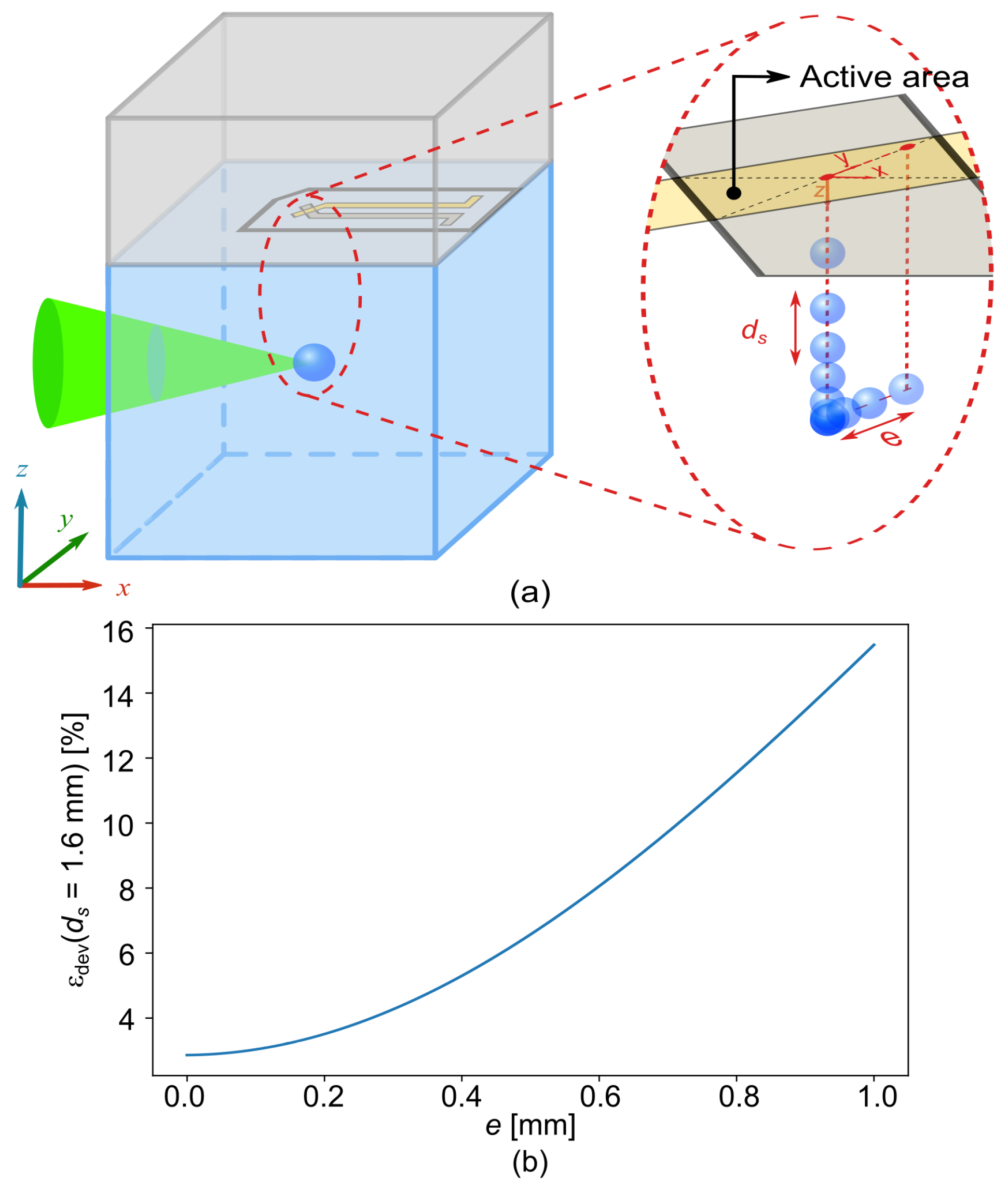
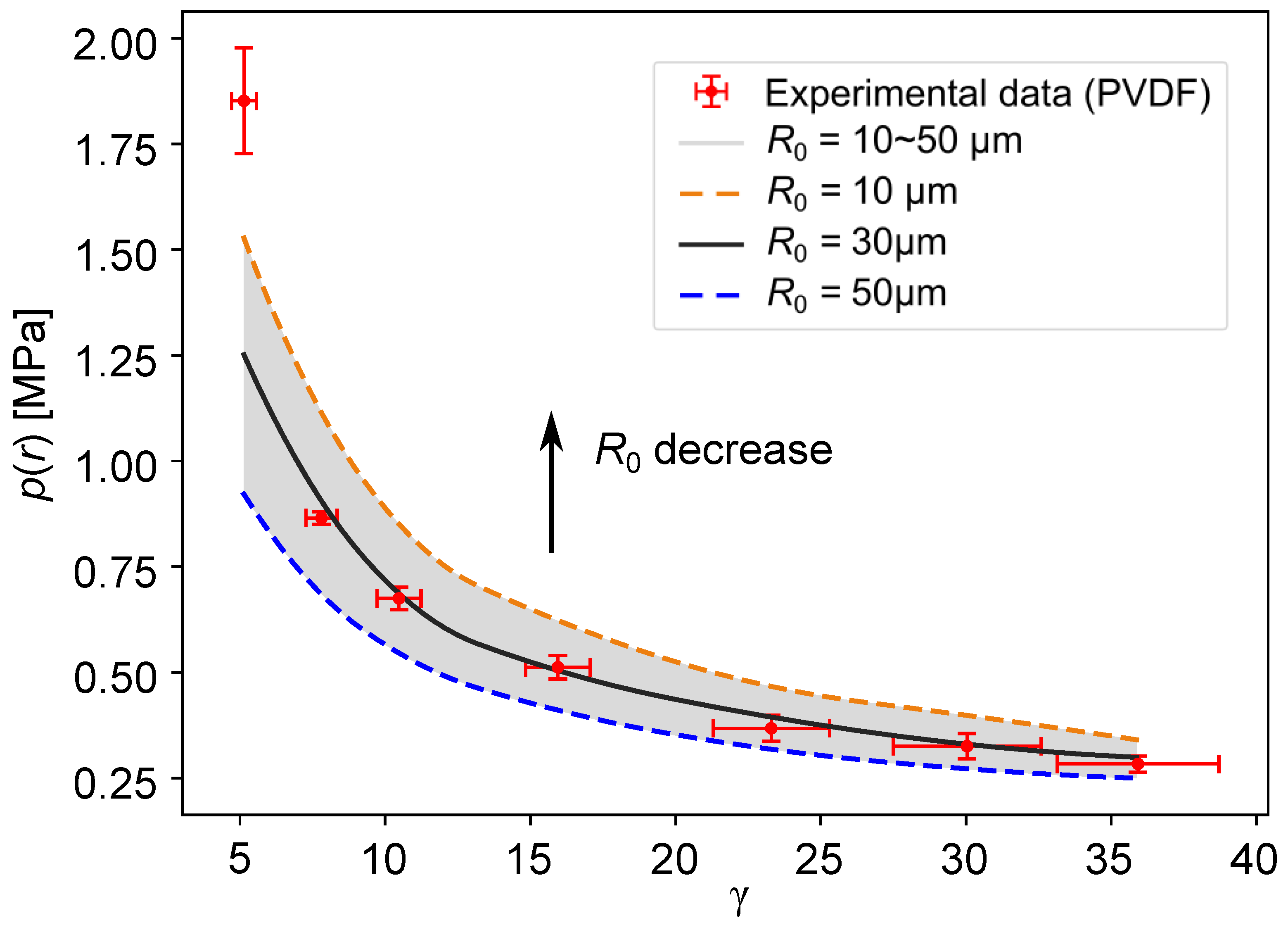
5.1. Effect of Curvature of Spherical Pressure Wave
5.2. Effect of Shock Wave Propagation in Different Medium
6. Result
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A. Formulation of the Gilmore Model
Appendix A.1. Basic Formulas of Gilmore Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ||
|---|---|---|
| Ambient pressure | 1.0091 × 105 | |
| Water density | 998 / | |
| Surface tension | /−1 | |
| Dynamic viscosity | 1.002 × 10−3 /−1 | |
| Vapor pressure | 2340 | |
| Constant of the Tait equation | B | 3.040 × 108 |
| Constant of the Tait equation | n | 7 |
| Polytropic coefficient | k | 1.33 |
Appendix A.2. Pressure Fields Throughout the Liquid
Appendix B. Comparison the PVDF Signal Filtered and No Filtered
References
- Knapp, R.; Daily, J.; Hammit, F. Cavitation McGraw-Hill. New York 1971, 117–131. [Google Scholar]
- Schmitt, G.F., Jr. Liquid and Solid Particle Impact Erosion; Technical Report; Air Force Materials Lab: Wright-Patterson AFB, OH, USA, 1979. [Google Scholar]
- Farhat, M. Contribution à l’étude de L’érosion de Cavitation: Mécanismes Hydrodynamiques et Prediction. Ph.D. Thesis, Epf Lausanne, Lausanne, Switzerland, 1994. [Google Scholar]
- Hasmatuchi, V.; Farhat, M.; Roth, S.; Botero, F.; Avellan, F. Experimental evidence of rotating stall in a pump-turbine at off-design conditions in generating mode. J. Fluids Eng. 2011, 133, 051104. [Google Scholar] [CrossRef]
- Bierbaum, S.J.; Greenhalgh, S.A. A high-frequency downhole sparker sound source for crosswell seismic surveying. Explor. Geophys. 1998, 29, 280–283. [Google Scholar] [CrossRef]
- Bergwerk, W. Flow pattern in diesel nozzle spray holes. Proc. Inst. Mech. Eng. 1959, 173, 655–660. [Google Scholar] [CrossRef]
- Nurick, W.H. Orifice Cavitation and Its Effect on Spray Mixing. J. Fluids Eng. 1976, 98, 681–687. [Google Scholar] [CrossRef]
- Payri, R.; García, J.; Salvador, F.; Gimeno, J. Using spray momentum flux measurements to understand the influence of diesel nozzle geometry on spray characteristics. Fuel 2005, 84, 551–561. [Google Scholar] [CrossRef]
- Cao, Y.; Idlahcen, S.; Blaisot, J.B.; Rozé, C.; Méès, L.; Maligne, D. Effect of geometry of real-size transparent nozzles on cavitation and on the atomizing jet in the near field. In Proceedings of the 28th Conference on Liquid Atomization and Spray Systems, Valencia, Spain, 6–8 September 2017. [Google Scholar] [CrossRef] [Green Version]
- Dumouchel, C.; Blaisot, J.B.; Abuzahra, F.; Sou, A.; Godard, G.; Idlahcen, S. Analysis of a textural atomization process. Exp. Fluids 2019, 60, 133. [Google Scholar] [CrossRef]
- Alexandrov, A.V.; Molina, C.A.; Grotta, J.C.; Garami, Z.; Ford, S.R.; Alvarez-Sabin, J.; Montaner, J.; Saqqur, M.; Demchuk, A.M.; Moyé, L.A.; et al. Ultrasound-enhanced systemic thrombolysis for acute ischemic stroke. N. Engl. J. Med. 2004, 351, 2170–2178. [Google Scholar] [CrossRef]
- Molina, C.A.; Ribo, M.; Rubiera, M.; Montaner, J.; Santamarina, E.; Delgado-Mederos, R.; Arenillas, J.F.; Huertas, R.; Purroy, F.; Delgado, P.; et al. Microbubble administration accelerates clot lysis during continuous 2-MHz ultrasound monitoring in stroke patients treated with intravenous tissue plasminogen activator. Stroke 2006, 37, 425–429. [Google Scholar] [CrossRef]
- Coleman, A.; Saunders, J. Comparison of extracorporeal shockwave lithotripters. Lithotripsy II 1987, 121, 121. [Google Scholar]
- Sackmann, M.; Delius, M.; Sauerbruch, T.; Holl, J.; Weber, W.; Ippisch, E.; Hagelauer, U.; Wess, O.; Hepp, W.; Brendel, W.; et al. Shock-wave lithotripsy of gallbladder stones. N. Engl. J. Med. 1988, 318, 393–397. [Google Scholar] [CrossRef]
- Zhong, P.; Cocks, F.H.; Preminger, G.M. Method for the Comminution of Concretions. U.S. Patent 5,582,578, 10 December 1996. [Google Scholar]
- Zhu, S.; Cocks, F.H.; Preminger, G.M.; Zhong, P. The role of stress waves and cavitation in stone comminution in shock wave lithotripsy. Ultrasound Med. Biol. 2002, 28, 661–671. [Google Scholar] [CrossRef]
- Pishchalnikov, Y.A.; Sapozhnikov, O.A.; Bailey, M.R.; Williams Jr, J.C.; Cleveland, R.O.; Colonius, T.; Crum, L.A.; Evan, A.P.; McAteer, J.A. Cavitation bubble cluster activity in the breakage of kidney stones by lithotripter shockwaves. J. Endourol. 2003, 17, 435–446. [Google Scholar] [CrossRef]
- Khokhlova, V.A.; Fowlkes, J.B.; Roberts, W.W.; Schade, G.R.; Xu, Z.; Khokhlova, T.D.; Hall, T.L.; Maxwell, A.D.; Wang, Y.N.; Cain, C.A. Histotripsy methods in mechanical disintegration of tissue: Towards clinical applications. Int. J. Hyperth. 2015, 31, 145–162. [Google Scholar] [CrossRef]
- Nakashima, M.; Tachibana, K.; Iohara, K.; Ito, M.; Ishikawa, M.; Akamine, A. Induction of reparative dentin formation by ultrasound-mediated gene delivery of growth/differentiation factor 11. Hum. Gene Ther. 2003, 14, 591–597. [Google Scholar] [CrossRef] [PubMed]
- Prentice, P.; McLean, D.; Cuschieri, A.; Dholakia, K.; Campbell, P. Spatially controlled sonoporation of prostate cancer cells via ultrasound activated microbubble cavitation. In Proceedings of the 2005 3rd IEEE/EMBS Special Topic Conference on Microtechnology in Medicine and Biology, Oahu, HI, USA, 12–15 May 2005; pp. 158–159. [Google Scholar]
- Ohl, C.D.; Arora, M.; Ikink, R.; De Jong, N.; Versluis, M.; Delius, M.; Lohse, D. Sonoporation from jetting cavitation bubbles. Biophys. J. 2006, 91, 4285–4295. [Google Scholar] [CrossRef] [Green Version]
- Marmottant, P.; Raven, J.; Gardeniers, H.; Bomer, J.; Hilgenfeldt, S. Microfluidics with ultrasound-driven bubbles. J. Fluid Mech. 2006, 568, 109–118. [Google Scholar] [CrossRef]
- Lentacker, I.; De Cock, I.; Deckers, R.; De Smedt, S.; Moonen, C. Understanding ultrasound induced sonoporation: Definitions and underlying mechanisms. Adv. Drug Deliv. Rev. 2014, 72, 49–64. [Google Scholar] [CrossRef] [Green Version]
- Mychaskiw, G.; Badr, A.E.; Tibbs, R.; Clower, B.R.; Zhang, J.H. Optison (FS069) disrupts the blood-brain barrier in rats. Anesth. Analg. 2000, 91, 798–803. [Google Scholar] [CrossRef]
- Hynynen, K.; McDannold, N.; Vykhodtseva, N.; Jolesz, F.A. Noninvasive MR imaging–guided focal opening of the blood-brain barrier in rabbits. Radiology 2001, 220, 640–646. [Google Scholar] [CrossRef] [PubMed]
- Ohl, C.D.; Arora, M.; Dijkink, R.; Janve, V.; Lohse, D. Surface cleaning from laser-induced cavitation bubbles. Appl. Phys. Lett. 2006, 89, 074102. [Google Scholar] [CrossRef]
- Reuter, F.; Mettin, R. Mechanisms of single bubble cleaning. Ultrason. Sonochem. 2016, 29, 550–562. [Google Scholar] [CrossRef] [PubMed]
- Chahine, G.L.; Kapahi, A.; Choi, J.K.; Hsiao, C.T. Modeling of surface cleaning by cavitation bubble dynamics and collapse. Ultrason. Sonochem. 2016, 29, 528–549. [Google Scholar] [CrossRef]
- Soyama, H.; Park, J.; Saka, M. Use of cavitating jet for introducing compressive residual stress. J. Manuf. Sci. Eng. 2000, 122, 83–89. [Google Scholar] [CrossRef]
- Soyama, H. Cavitating jet: A review. Appl. Sci. 2020, 10, 7280. [Google Scholar] [CrossRef]
- Taghavi, R. Cavitation Inception in Axisymmetric Turbulent Jets. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 1985. [Google Scholar]
- Soyama, H.; Lichtarowicz, A.; Momma, T. Vortex cavitation in a submerged jet. Am. Soc. Mech. Eng. Fluids Eng. Div. Publ. FED 1996, 236, 415–422. [Google Scholar]
- Arndt, R.E. Cavitation in vortical flows. Annu. Rev. Fluid Mech. 2002, 34, 143–175. [Google Scholar] [CrossRef]
- Klumppa, A.; Lienerta, F.; Dietricha, S.; Soyamab, H.; Schulzea, V. Surface strengthening of AISI4140 by cavitation peening. In Proceedings of the 13th International Conference on Shot Peening (ICSP), Montréal, QC, Canada, 18–21 September 2017; pp. 441–446. [Google Scholar]
- Soyama, H.; Saito, K.; Saka, M. Improvement of Fatigue Strength of Aluminum Alloy by Cavitation Shotless Peening. J. Eng. Mater. Technol. 2002, 124, 135–139. [Google Scholar] [CrossRef]
- Soyama, H. Laser Cavitation Peening and Its Application for Improving the Fatigue Strength of Welded Parts. Metals 2021, 11, 531. [Google Scholar] [CrossRef]
- Reuter, F.; Ohl, C.D. Supersonic needle-jet generation with single cavitation bubbles. Appl. Phys. Lett. 2021, 118, 134103. [Google Scholar] [CrossRef]
- Sonde, E.; Chaise, T.; Boisson, N.; Nelias, D. Modeling of cavitation peening: Jet, bubble growth and collapse, micro-jet and residual stresses. J. Mater. Process. Technol. 2018, 262, 479–491. [Google Scholar] [CrossRef]
- Plesset, M.S. The dynamics of cavitation bubbles. J. Appl. Mech. 1949, 16, 277–282. [Google Scholar] [CrossRef]
- Lauterborn, W.; Ohl, C.D. Cavitation bubble dynamics. Ultrason. Sonochem. 1997, 4, 65–75. [Google Scholar] [CrossRef]
- Ohl, C.D.; Kurz, T.; Geisler, R.; Lindau, O.; Lauterborn, W. Bubble dynamics, shock waves and sonoluminescence. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1999, 357, 269–294. [Google Scholar] [CrossRef]
- Akhatov, I.; Lindau, O.; Topolnikov, A.; Mettin, R.; Vakhitova, N.; Lauterborn, W. Collapse and rebound of a laser-induced cavitation bubble. Phys. Fluids 2001, 13, 2805–2819. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.C.; Chen, Y.W. Application of piezoelectric PVDF film to the measurement of impulsive forces generated by cavitation bubble collapse near a solid boundary. Exp. Therm. Fluid Sci. 2007, 32, 403–414. [Google Scholar] [CrossRef]
- Lauterborn, W.; Vogel, A. Shock wave emission by laser generated bubbles. In Bubble Dynamics and Shock Waves; Springer: Berlin/Heidelberg, Germany, 2013; pp. 67–103. [Google Scholar]
- Supponen, O.; Kobel, P.; Obreschkow, D.; Farhat, M. The inner world of a collapsing bubble. Phys. Fluids 2015, 27, 091113. [Google Scholar] [CrossRef]
- Lauterborn, W.; Bolle, H. Experimental investigations of cavitation-bubble collapse in the neighbourhood of a solid boundary. J. Fluid Mech. 1975, 72, 391–399. [Google Scholar] [CrossRef]
- Yang, Y.X.; Wang, Q.X.; Keat, T. Dynamic features of a laser-induced cavitation bubble near a solid boundary. Ultrason. Sonochem. 2013, 20, 1098–1103. [Google Scholar] [CrossRef]
- Vincent, O.; Marmottant, P.; Gonzalez-Avila, S.R.; Ando, K.; Ohl, C.D. The fast dynamics of cavitation bubbles within water confined in elastic solids. Soft Matter 2014, 10, 1455–1461. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hamaguchi, F.; Ando, K. Linear oscillation of gas bubbles in a viscoelastic material under ultrasound irradiation. Phys. Fluids 2015, 27, 113103. [Google Scholar] [CrossRef]
- Oguri, R.; Ando, K. Cavitation bubble nucleation induced by shock-bubble interaction in a gelatin gel. Phys. Fluids 2018, 30, 051904. [Google Scholar] [CrossRef] [Green Version]
- Neppiras, E.A. Acoustic cavitation. Phys. Rep. 1980, 61, 159–251. [Google Scholar] [CrossRef]
- Lauterborn, W. Cavitation and coherent optics. In Cavitation and Inhomogeneities in Underwater Acoustics; Springer: Berlin/Heidelberg, Germany, 1980; pp. 3–12. [Google Scholar]
- Dijkink, R.; Ohl, C.D. Measurement of cavitation induced wall shear stress. Appl. Phys. Lett. 2008, 93, 254107. [Google Scholar] [CrossRef]
- Obreschkow, D.; Tinguely, M.; Dorsaz, N.; Kobel, P.; De Bosset, A.; Farhat, M. The quest for the most spherical bubble: Experimental setup and data overview. Exp. Fluids 2013, 54, 1503. [Google Scholar] [CrossRef] [Green Version]
- Tomita, Y.; Shima, A. High-speed photographic observations of laser-induced cavitation bubbles in water. Acta Acust. United Acust. 1990, 71, 161–171. [Google Scholar]
- Jones, I.; Edwards, D. An experimental study of the forces generated by the collapse of transient cavities in water. J. Fluid Mech. 1960, 7, 596–609. [Google Scholar] [CrossRef]
- Fujikawa, S.; Akamatsu, T. Experimental investigations of cavitation bubble collapse by a water shock tube. Bull. JSME 1978, 21, 223–230. [Google Scholar] [CrossRef]
- Wang, Z.; Pecha, R.; Gompf, B.; Eisenmenger, W. Single bubble sonoluminescence: Investigations of the emitted pressure wave with a fiber optic probe hydrophone. Phys. Rev. E 1999, 59, 1777. [Google Scholar] [CrossRef]
- Sinibaldi, G.; Occhicone, A.; Alves Pereira, F.; Caprini, D.; Marino, L.; Michelotti, F.; Casciola, C. Laser induced cavitation: Plasma generation and breakdown shockwave. Phys. Fluids 2019, 31, 103302. [Google Scholar] [CrossRef]
- Bauer, F. PVDF shock compression sensors in shock wave physics. In Proceedings of the AIP Conference Proceedings, Sacramento, CA, USA, 4–5 August 2004; Volume 706, pp. 1121–1124. [Google Scholar]
- Arrigoni, M.; Bauer, F. Experimental techniques in shock physics. In Greener and Safer Energetic and Ballistic Systems; Military Technical Academy Publishing House: Bucharest, Romania, 2016. [Google Scholar]
- Bauer, F.; Lichtenberger, A. Use of PVF2 Shock Gauges for Stress Measurements in Hopkinson Bar. In Shock Waves in Condensed Matter 1987; Schmidt, S.C., Holmes, N.C., Eds.; Elsevier Science Publishers B.V.: New York, NY, USA, 1988; pp. 631–634. [Google Scholar]
- Hiermaier, S.; Meenken, T. Characterization of low-impedance materials at elevated strain rates. J. Strain Anal. Eng. Des. 2010, 45, 401–409. [Google Scholar] [CrossRef]
- Toda, M.; Thompson, M.L. Contact-type vibration sensors using curved clamped PVDF film. IEEE Sens. J. 2006, 6, 1170–1177. [Google Scholar] [CrossRef]
- Rayleigh, L. VIII. On the pressure developed in a liquid during the collapse of a spherical cavity. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1917, 34, 94–98. [Google Scholar] [CrossRef]
- Gilmore, F.R. The Growth or Collapse of a Spherical Bubble in a Viscous Compressible Liquid Report No 26-4; Hydrodynamics Laboratory, California Institute of Technology: Pasadena, CA, USA, 1952. [Google Scholar]
- Benjamin, T.B.; Ellis, A.T. Self-propulsion of asymmetrically vibrating bubbles. J. Fluid Mech. 1990, 212, 65–80. [Google Scholar] [CrossRef]
- Keller, J.B.; Miksis, M. Bubble oscillations of large amplitude. J. Acoust. Soc. Am. 1980, 68, 628–633. [Google Scholar] [CrossRef] [Green Version]
- Arrigoni, M.; Bauer, F.; Kerampran, S.; Le Clanche, J.; Monloubou, M. Development of a PVDF Pressure Gauge for Blast Loading Measurement. Hum. Factors Mech. Eng. Def. Saf. 2018, 2, 1–9. [Google Scholar] [CrossRef]
- Berthe, L.; Fabbro, R.; Peyre, P.; Bartnicki, E. Wavelength dependent of laser shock-wave generation in the water-confinement regime. J. Appl. Phys. 1999, 85, 7552–7555. [Google Scholar] [CrossRef]
- Vogel, A.; Venugopalan, V. Pulsed Laser Ablation of Soft Biological Tissues. In Optical-Thermal Response of Laser-Irradiated Tissue; Welch, A.J., van Gemert, M.J., Eds.; Springer: Dordrecht, The Netherlands, 2011; pp. 551–615. [Google Scholar] [CrossRef] [Green Version]
- Sato, T.; Tinguely, M.; Oizumi, M.; Farhat, M. Evidence for hydrogen generation in laser-or spark-induced cavitation bubbles. Appl. Phys. Lett. 2013, 102, 074105. [Google Scholar] [CrossRef] [Green Version]
- Fourest, T.; Arrigoni, M.; Deletombe, E.; Dupas, J.; Laurens, J.M. Prediction of Thermal Effects of Magniture for Hream Event in Fuel-Filled Tank Using the Rayleigh-Plesset Equation. Int. J. Comput. Methods Exp. Meas. 2016, 4, 301–310. [Google Scholar]
- Cole, R.H.; Weller, R. Underwater explosions. Phys. Today 1948, 1, 35. [Google Scholar] [CrossRef]
- Soyama, H. Key factors and applications of cavitation peening. Int. J. Peen. Sci. Technol. 2017, 1, 3–60. [Google Scholar]
- Mostovykh, P.; Arrigoni, M. Handmade 25 μm thin PVDF based hydrophone and its calibration. In Proceedings of the 15èmes Journées De L’hydrodynamique, Brest, France, 22–24 November 2016. [Google Scholar]
- Dickson, L.D. Characteristics of a propagating Gaussian beam. Appl. Opt. 1970, 9, 1854–1861. [Google Scholar] [CrossRef] [PubMed]
- Siegman, A.E. Defining, measuring, and optimizing laser beam quality. In Laser Resonators and Coherent Optics: Modeling, Technology, and Applications; International Society for Optics and Photonics: Los Angeles, CA, USA, 1993; Volume 1868, pp. 2–12. [Google Scholar]
- Graham, R.A. Solids under High-Pressure Shock Compression; Springer: New York, NY, USA, 1993; pp. 103–113. [Google Scholar]
- Philipp, A.; Lauterborn, W. Cavitation erosion by single laser-produced bubbles. J. Fluid Mech. 1998, 361, 75–116. [Google Scholar] [CrossRef]
- Meyers, M.A. Dynamic Behavior of Materials; John Wiley & Sons: Wiley, New York, USA, 1994. [Google Scholar]



| Parameters | |
|---|---|
| Stress range | 102 to 1010 |
| Frequency range | 10−2 to 109 |
| Operating temperature | −40 to 60 |
| Piezoelectric coefficient () | 23.8 ± −1 |
| Thickness | 0.24 ± |
| Active surface | 1 2 |
| Input impedance of oscilloscope channels | 1 |
| Material | [kg m] | c [m s] |
|---|---|---|
| Water | 998 | 1488 |
| PVDF | 1767 | 2579 |
| PMMA | 1186 | 2600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Mauger, C.; Chaise, T.; Elguedj, T.; Arrigoni, M.; El Hajem, M.; Boisson, N. Experimental and Analytical Study of under Water Pressure Wave Induced by the Implosion of a Bubble Generated by Focused Laser. Sensors 2021, 21, 4800. https://doi.org/10.3390/s21144800
Han Z, Mauger C, Chaise T, Elguedj T, Arrigoni M, El Hajem M, Boisson N. Experimental and Analytical Study of under Water Pressure Wave Induced by the Implosion of a Bubble Generated by Focused Laser. Sensors. 2021; 21(14):4800. https://doi.org/10.3390/s21144800
Chicago/Turabian StyleHan, Zhaofeng, Cyril Mauger, Thibaut Chaise, Thomas Elguedj, Michel Arrigoni, Mahmoud El Hajem, and Nicolas Boisson. 2021. "Experimental and Analytical Study of under Water Pressure Wave Induced by the Implosion of a Bubble Generated by Focused Laser" Sensors 21, no. 14: 4800. https://doi.org/10.3390/s21144800
APA StyleHan, Z., Mauger, C., Chaise, T., Elguedj, T., Arrigoni, M., El Hajem, M., & Boisson, N. (2021). Experimental and Analytical Study of under Water Pressure Wave Induced by the Implosion of a Bubble Generated by Focused Laser. Sensors, 21(14), 4800. https://doi.org/10.3390/s21144800