
Temporal Alignment of Dual Monitor Accelerometry Recordings



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Measurements
2.3. RTC Accuracy and Temporal Alignment
2.4. Reference Temporal Alignment
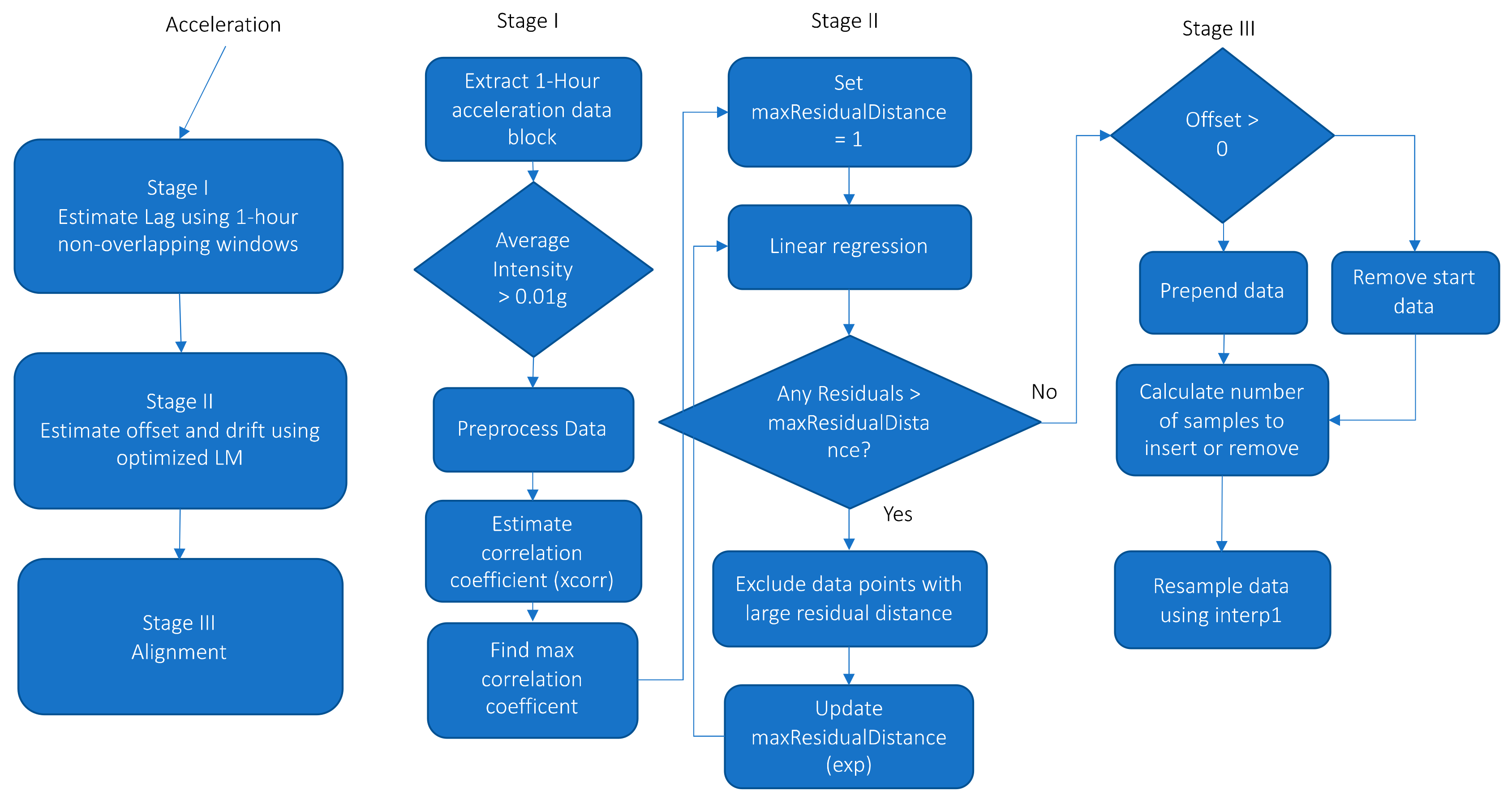
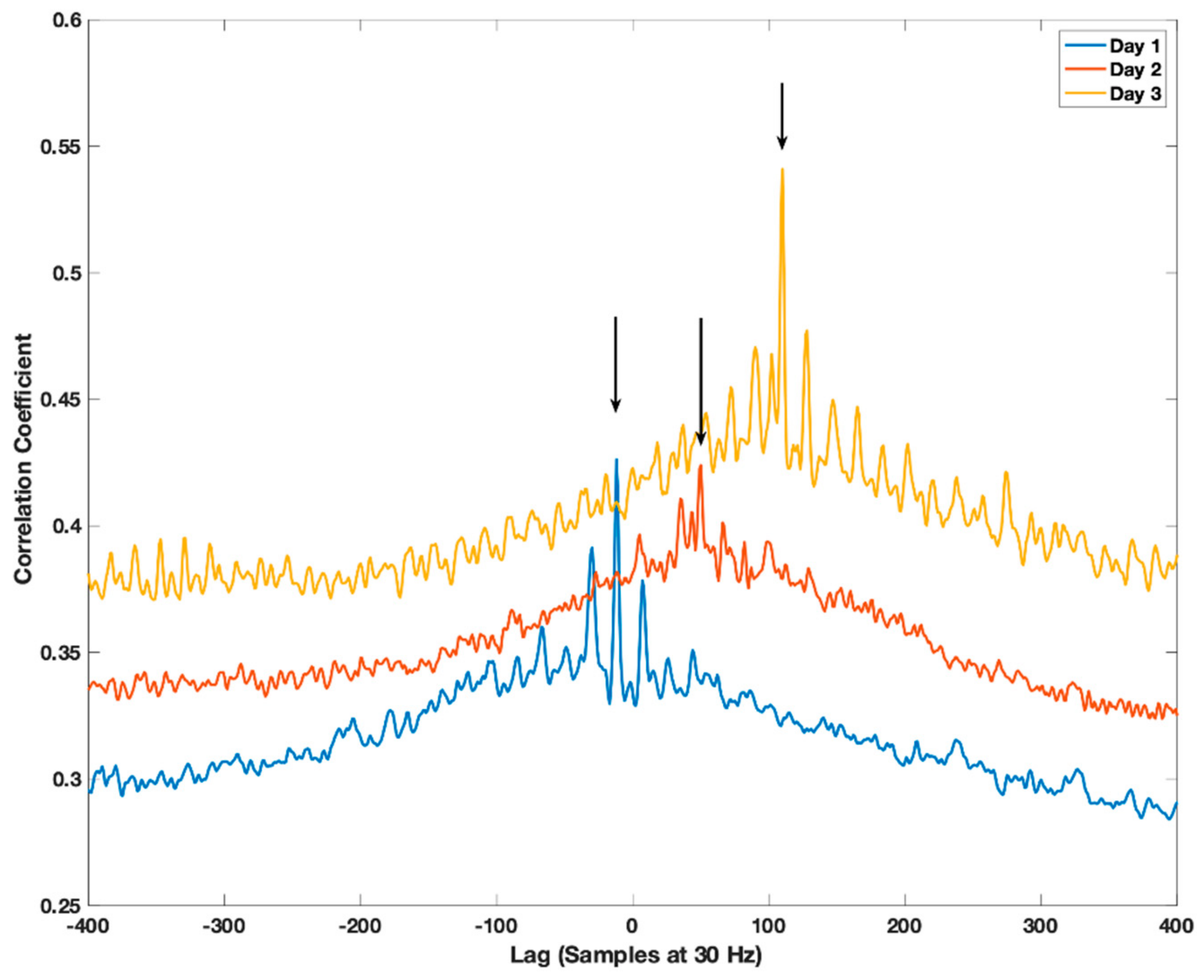
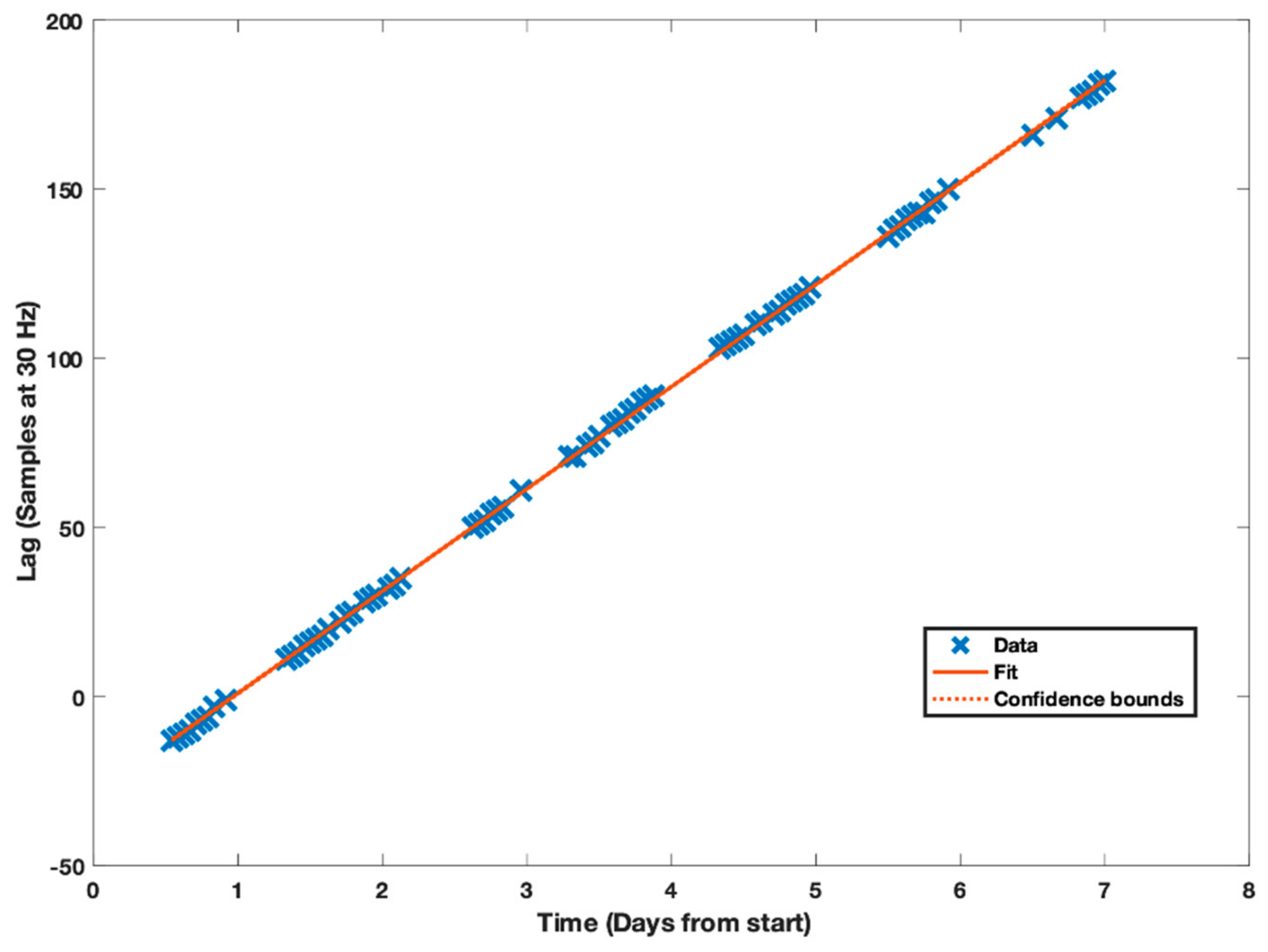
2.5. Automated Temporal Alignment
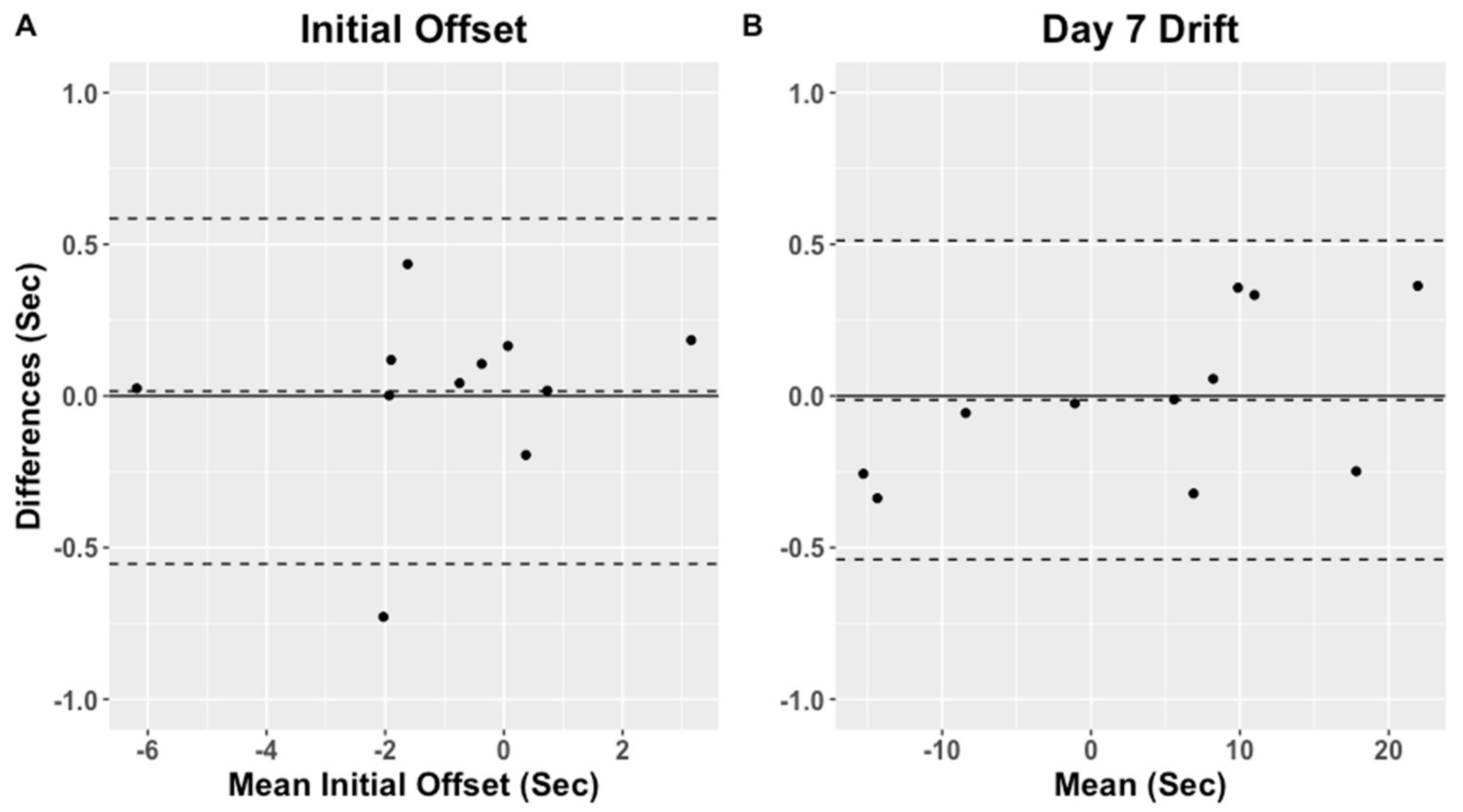
2.6. Statistics
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, I.-M.; Shiroma, E.J.; Lobelo, F.; Puska, P.; Blair, S.N.; Katzmarzyk, P. Effect of physical inactivity on major non-communicable diseases worldwide: An analysis of burden of disease and life expectancy. Lancet 2012, 380, 219–229. Available online: https://www.ncbi.nlm.nih.gov/pubmed/22818936 (accessed on 1 July 2021). [CrossRef] [Green Version]
- Liu, S.; Gao, R.X.; John, D.; Staudenmayer, J.W.; Freedson, P.S. Multisensor data fusion for physical activity assessment. IEEE Trans. Biomed. Eng. 2011, 59, 687–696. [Google Scholar] [CrossRef] [PubMed]
- Skotte, J.; Korshøj, M.; Kristiansen, J.; Hanisch, C.; Holtermann, A. Detection of physical activity types using triaxial accelerometers. J. Phys. Act. Health 2014, 11, 76–84. Available online: http://www.ncbi.nlm.nih.gov/pubmed/23249722 (accessed on 8 February 2015). [CrossRef]
- Stewart, T.; Narayanan, A.; Hedayatrad, L.; Neville, J.; Mackay, L.; Duncan, S. A dual-accelerometer system for classifying physical activity in children and adults. Med. Sci. Sports Exerc. 2018, 50, 2595–2602. Available online: https://www.ncbi.nlm.nih.gov/pubmed/30048411 (accessed on 10 January 2019). [CrossRef]
- Zhang, K.; Pi-Sunyer, F.X.; Boozer, C.N. Improving energy expenditure estimation for physical activity. Med. Sci. Sports Exerc. 2004, 36, 883–889. Available online: https://www.ncbi.nlm.nih.gov/pubmed/15126725 (accessed on 10 January 2019).
- Aadland, E.; Ylvisaker, E. Reliability of the actigraph GT3X+ accelerometer in adults under free-living conditions. PLoS ONE 2015, 10, e0134606. Available online: https://www.ncbi.nlm.nih.gov/pubmed/26274586 (accessed on 10 January 2019). [CrossRef] [Green Version]
- Aadland, E.; Ylvisaker, E. Reliability of objectively measured sedentary time and physical activity in adults. PLoS ONE 2015, 10, e0133296. Available online: https://www.ncbi.nlm.nih.gov/pubmed/26192184 (accessed on 10 January 2019). [CrossRef] [Green Version]
- Schuna, J.; Barrieira, T.; Tudor-Locke, C. An evaluation of the clock drift phenomenon with the actigraph accelerometer. In Proceedings of the International Conference on Ambulatory Monitoring of Physical Activity and Movement (ICAMPAM), Limerick, Ireland, 10–12 June 2015. [Google Scholar]
- Steel, C.; Bejarano, C.; Carlson, J.A. Time drift considerations when using GPS and accelerometers. J. Meas. Phys. Behav. 2019, 2, 203–207. Available online: https://journals.humankinetics.com/view/journals/jmpb/2/3/article-p203.xml (accessed on 5 January 2020). [CrossRef]
- Coakley, K.J.; Hale, P. Alignment of noisy signals. IEEE Trans. Instrum. Meas. 2001, 50, 141–149. [Google Scholar] [CrossRef]
- Gil-Pita, R.; Rosa-Zurera, M.; Vicen-Bueno, R.; Utrilla-Manso, M. Improving alignment of noisy signals using an iterative zero phase method. In Proceedings of the 2005 13th European Signal Processing Conference, Antalya, Turkey, 4–8 September 2005; pp. 1–4. [Google Scholar]
- Folgado, D.; Barandas, M.; Matias, R.; Martins, R.; Carvalho, M.; Gamboa, H. Time alignment measurement for time series. Pattern Recognit. 2018, 81, 268–279. Available online: https://www.sciencedirect.com/science/article/pii/S0031320318301286 (accessed on 20 August 2020). [CrossRef]
- Pedersen, N.H.; Koch, S.; Larsen, K.T.; Kristensen, P.L.; Troelsen, J.; Møller, N.C.; Brønd, J.C.; Hjelmborg, J.V.B.; Brage, S.; Grøntved, A. Protocol for evaluating the impact of a national school policy on physical activity levels in Danish children and adolescents: The PHASAR study—A natural experiment. BMC Public Health 2018, 18, 1245. Available online: https://www.ncbi.nlm.nih.gov/pubmed/30409171 (accessed on 8 June 2020). [CrossRef]
- Jackson, D.G. Omgui Software. Openmovement. 2016. Available online: https://github.com/digitalinteraction/openmovement/wiki/AX3-GUI (accessed on 1 April 2016).
- Rhee, I.-K.; Lee, J.; Kim, J.; Serpedin, E.; Wu, Y.-C. Clock synchronization in wireless sensor networks: An overview. Sensors 2009, 9, 56–85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Chaudhari, Q.; Serpedin, E. Clock synchronization of wireless sensor networks. IEEE Signal Process. Mag. 2011, 28, 124–138. [Google Scholar] [CrossRef]
- Vig, J.R. Introduction to Quartz Frequency Standards. Revision; NASA STI/Recon Technical Report N 93; Defense Technical Information Center: Fort Belvoir, VA, USA, 1992; p. 15330. [Google Scholar]
- Greco, L.; Luta, G.; Krzywinski, M.; Altman, N. Analyzing outliers: Robust methods to the rescue. Nat. Chem. Biol. 2019, 16, 275–276. [Google Scholar] [CrossRef] [PubMed]
- Busleiman, A.; Crook, J.; Danneberg, R.; Daulton, S.; Kozikowski, R.; Licameli, P.; Sampson, P.; Wharrie, B. Audacity Version 2.3.3. 2019. Available online: https://www.audacityteam.org/ (accessed on 1 February 2020).
- Van Hees, V.T.; Gorzelniak, L.; León, E.C.D.; Eder, M.; Pias, M.; Taherian, S.; Ekelund, U.; Renström, F.; Franks, P.; Horsch, A.; et al. Separating Movement and Gravity Components in an Acceleration Signal and Implications for the Assessment of Human Daily Physical Activity. PLoS ONE 2013, 8, e61691. Available online: http://www.ncbi.nlm.nih.gov/pubmed/23626718 (accessed on 21 January 2018). [CrossRef] [Green Version]
- Christodoulakis, G.; Busawon, K.; Caplan, N.; Stewart, S. On the filtering and smoothing of biomechanical data. In Proceedings of the 2010 7th International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP 2010), Newcastle Upon Tyne, UK, 21–23 July 2010; pp. 512–516. [Google Scholar] [CrossRef]
- Mathworks Inc. Zero-Phase Digital Filtering. 2021. Available online: https://se.mathworks.com/help/signal/ref/filtfilt.html (accessed on 2 June 2021).
- Mathworks Inc. Cross-Correlation. 2021. Available online: https://se.mathworks.com/help/matlab/ref/xcorr.html (accessed on 8 February 2021).
- Mathworks Inc. Fit Linear Regression Model. 2021. Available online: https://se.mathworks.com/help/stats/fitlm.html?searchHighlight=fitlm&s_tid=srchtitle (accessed on 8 February 2021).
- Mathworks Inc. 1-d Data Interpolation (Interp1). 2021. Available online: https://se.mathworks.com/help/matlab/ref/interp1.html (accessed on 2 June 2021).
- Team, R.C. R: A Language and Environment for Statistical Computing, 1.2.5033. 2019. Available online: https://www.R-project.org/ (accessed on 7 February 2019).
- Matlab. Version 9.9.0 (r2020b Update 4); The MathWorks Inc.: Natick, MA, USA, 2020. [Google Scholar]
- Datta, D. Blandr: A Bland-Altman Method Comparison Package for R. 2017. Available online: https://github.com/deepankardatta/blandr (accessed on 1 May 2021).
- Hildebrand, M.; Van Hees, V.T.; Hansen, B.H.; Ekelund, U. Age group comparability of raw accelerometer output from wrist- and hip-worn monitors. Med. Sci. Sports Exerc. 2014, 46, 1816–1824. Available online: http://www.ncbi.nlm.nih.gov/pubmed/24887173 (accessed on 21 January 2018). [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brønd, J.C.; Pedersen, N.H.; Larsen, K.T.; Grøntved, A. Temporal Alignment of Dual Monitor Accelerometry Recordings. Sensors 2021, 21, 4777. https://doi.org/10.3390/s21144777
Brønd JC, Pedersen NH, Larsen KT, Grøntved A. Temporal Alignment of Dual Monitor Accelerometry Recordings. Sensors. 2021; 21(14):4777. https://doi.org/10.3390/s21144777
Chicago/Turabian StyleBrønd, Jan Christian, Natascha Holbæk Pedersen, Kristian Traberg Larsen, and Anders Grøntved. 2021. "Temporal Alignment of Dual Monitor Accelerometry Recordings" Sensors 21, no. 14: 4777. https://doi.org/10.3390/s21144777
APA StyleBrønd, J. C., Pedersen, N. H., Larsen, K. T., & Grøntved, A. (2021). Temporal Alignment of Dual Monitor Accelerometry Recordings. Sensors, 21(14), 4777. https://doi.org/10.3390/s21144777