
Development of a Low-Power Underwater NFC-Enabled Sensor Device for Seaweed Monitoring


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
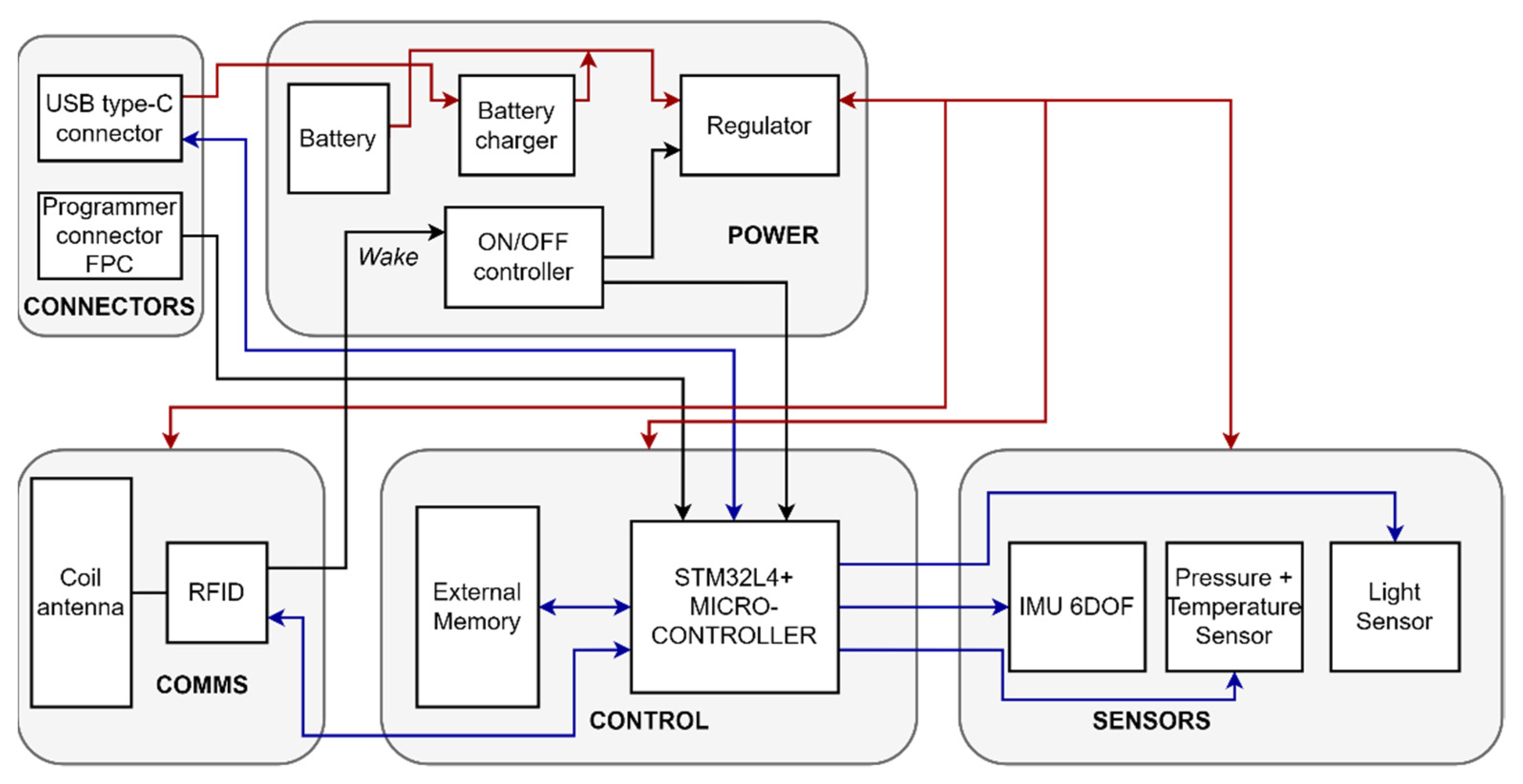
2.1. Hardware Architecture
- The device must be as small as possible as to not disturb the seaweed physiology; be reusable to reduce environmental waste and pollution; waterproof and resistant to the marine environment.
- The sensors should be configurable regarding sampling frequency and other relevant parameters to allow greater customisation in the deployment. The device should be able to log temperature, depth, movement via acceleration, and light intensity on a single small package.
- The device must have a battery and wireless communication to be able to collect the logged data remotely.
- The battery should be rechargeable to reduce waste, and its lifetime should be maximised to allow longer periods of deployment without the need for farm operator interaction.
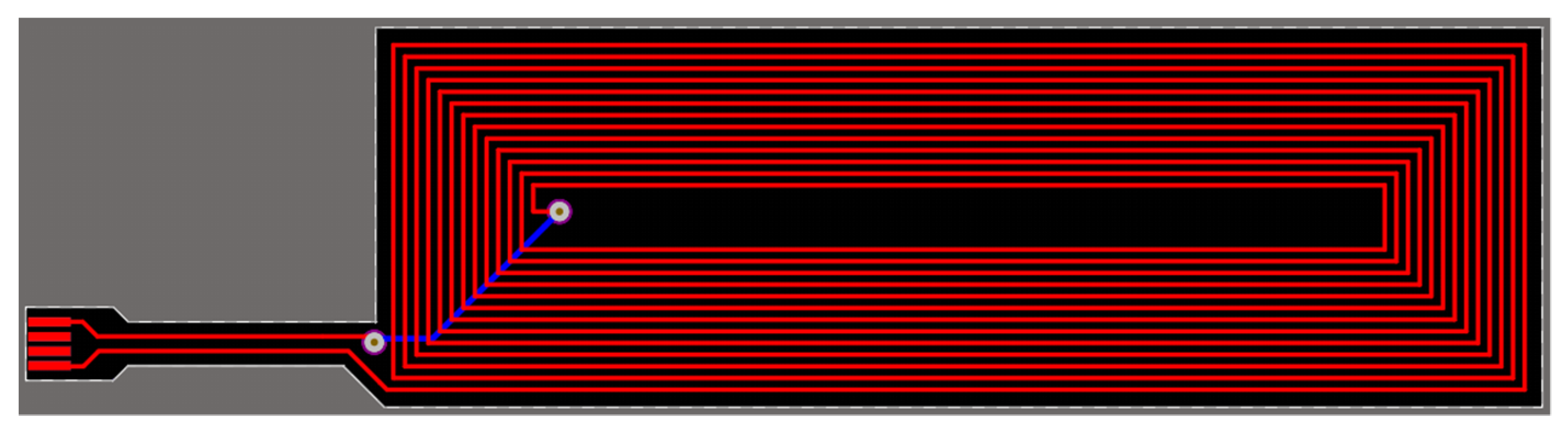
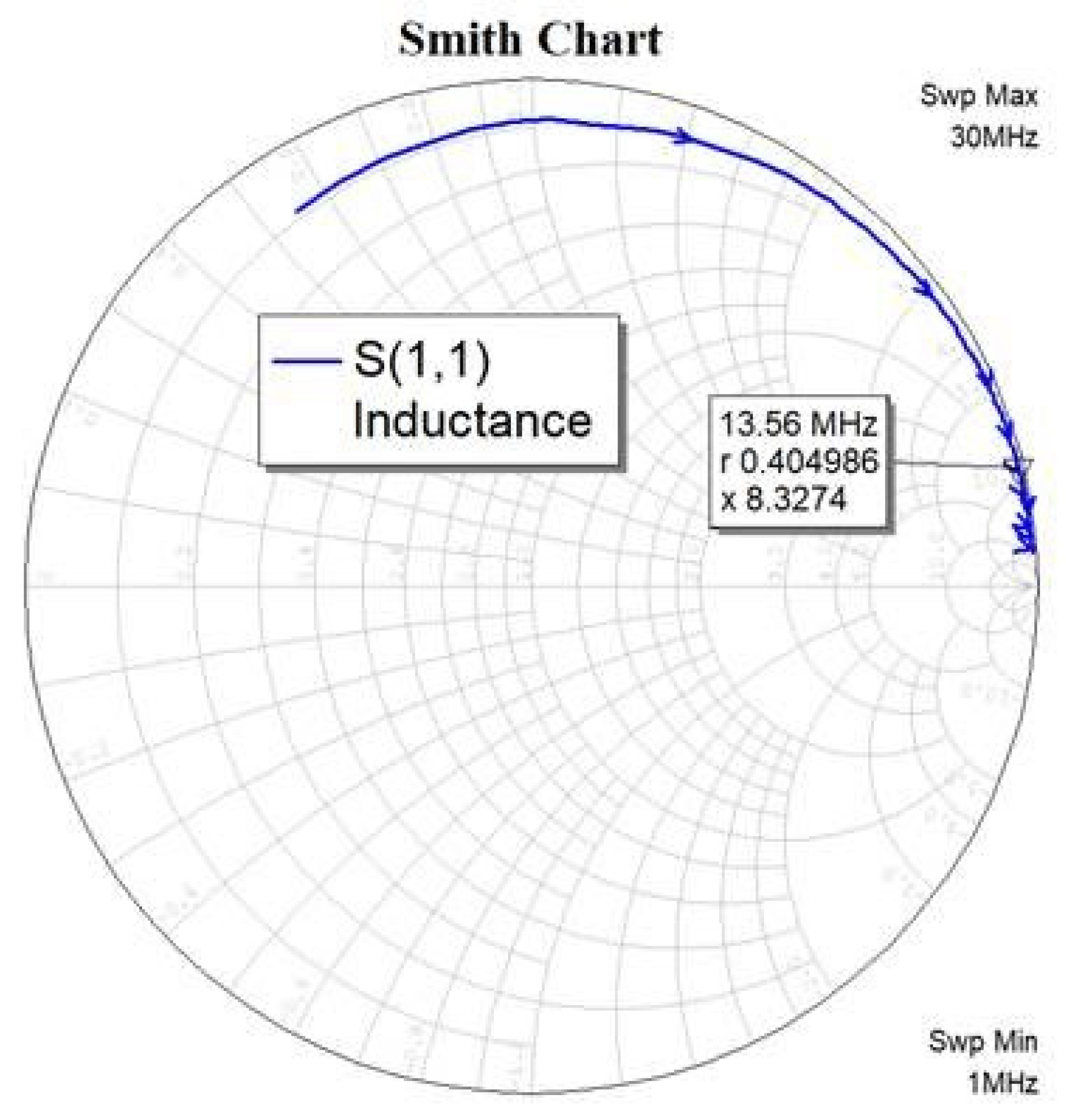
2.2. RFID/NFC Antenna Design
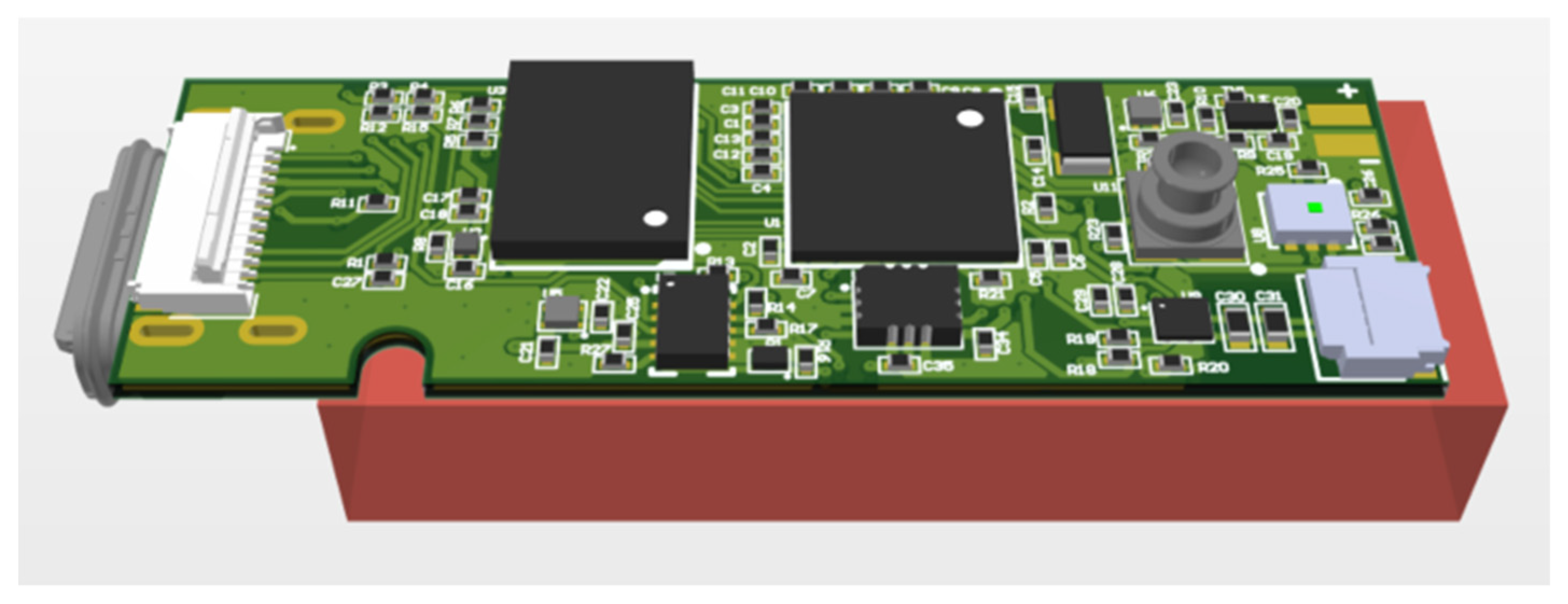
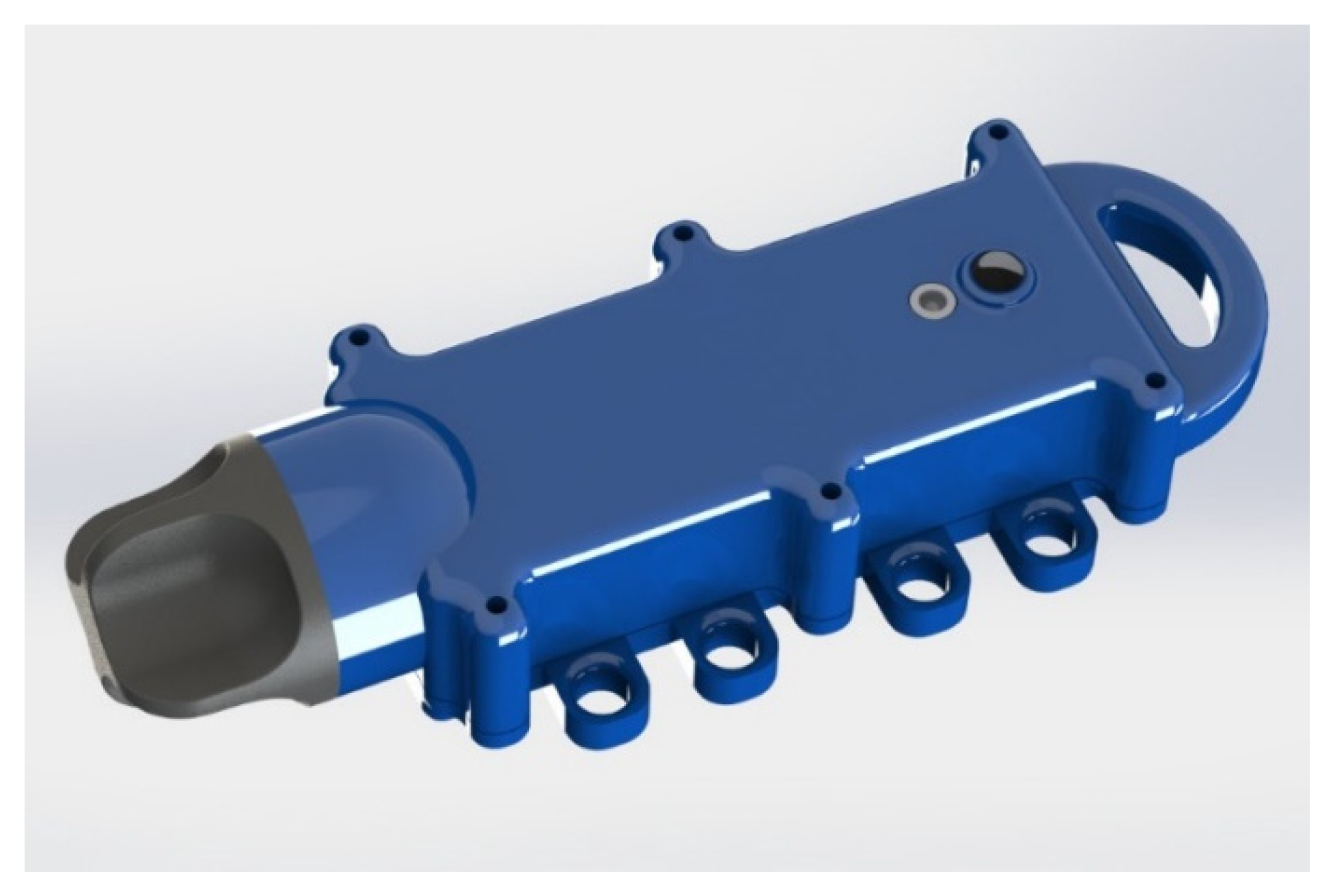
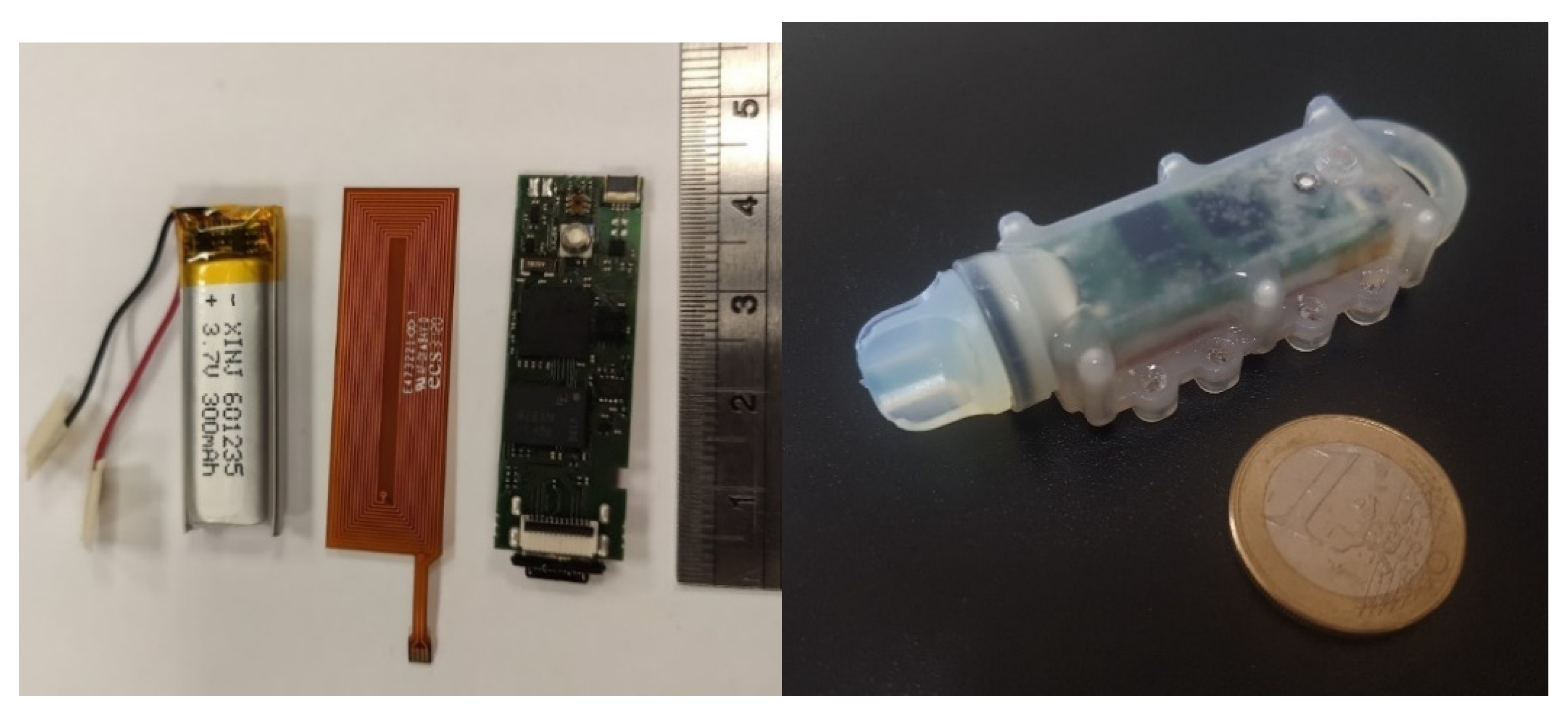
2.3. Enclosure Design
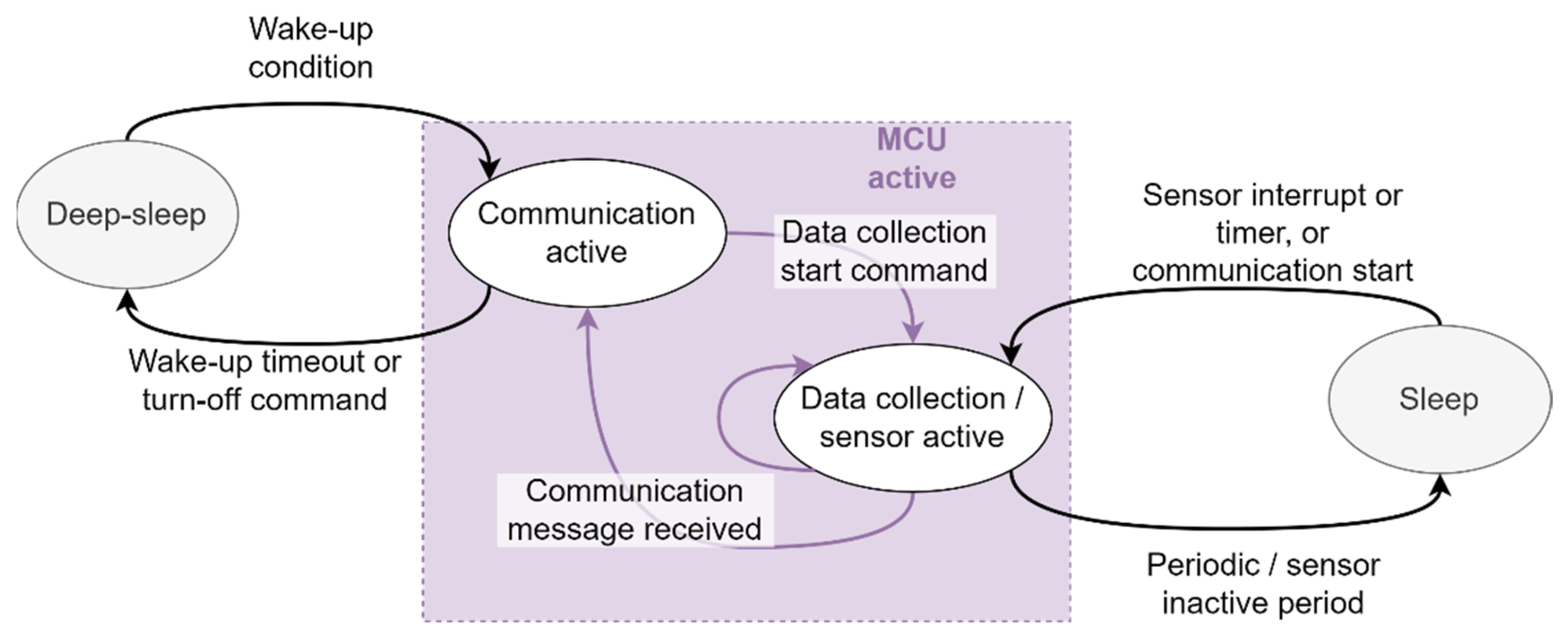
2.4. Firmware Design
2.5. Host Application
3. Results
3.1. Sensors Characterisation and Calibration
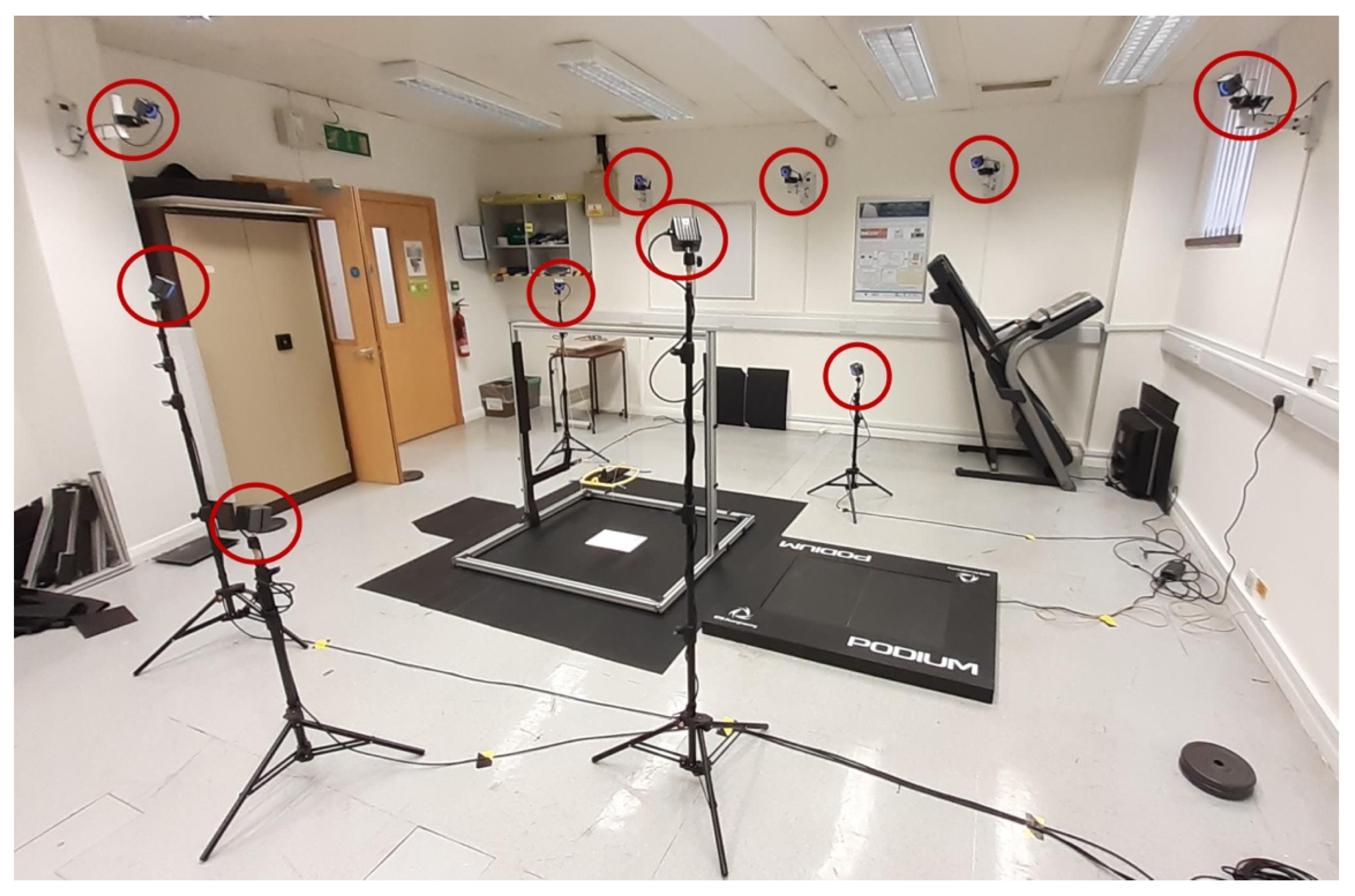
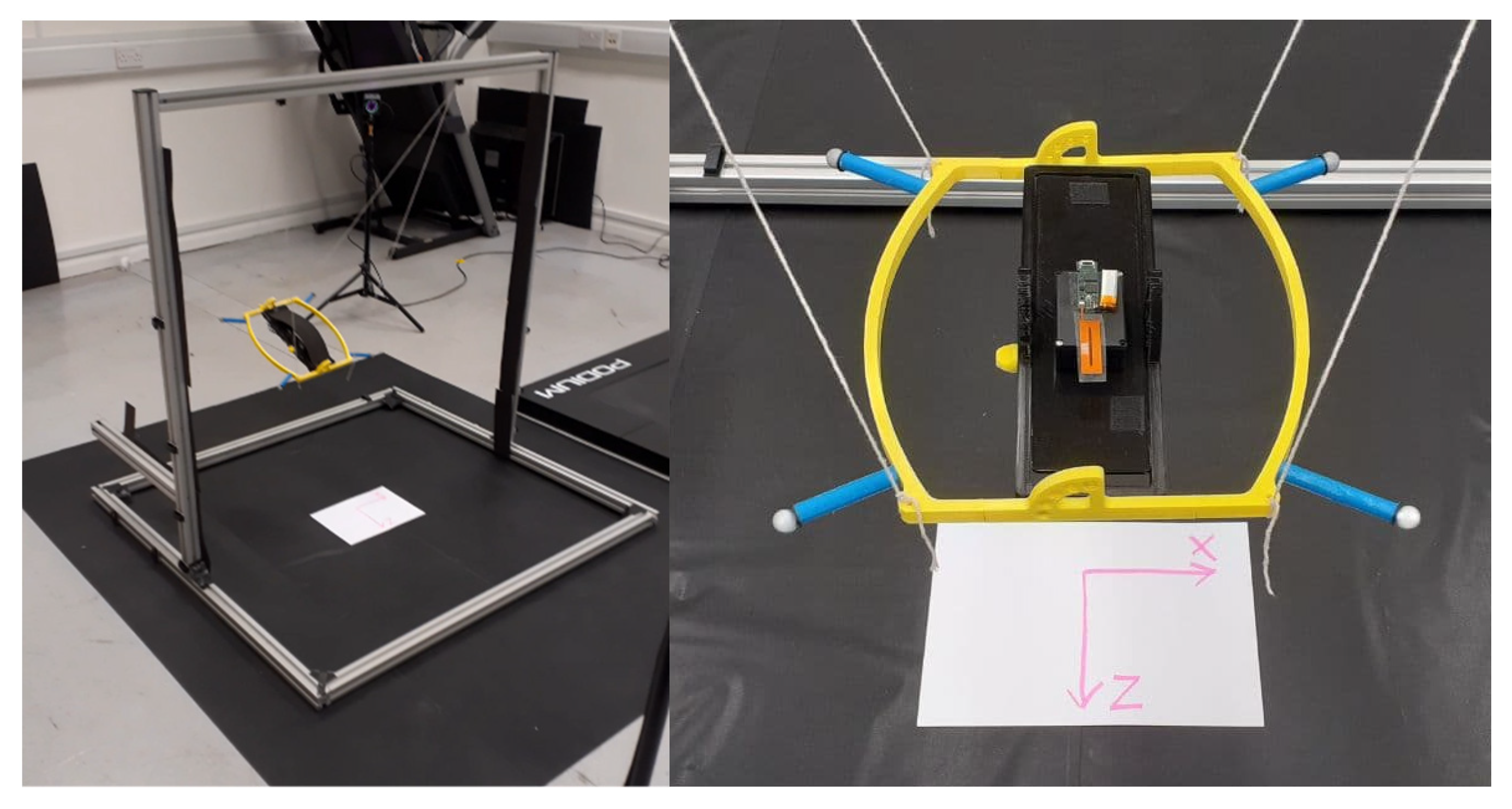
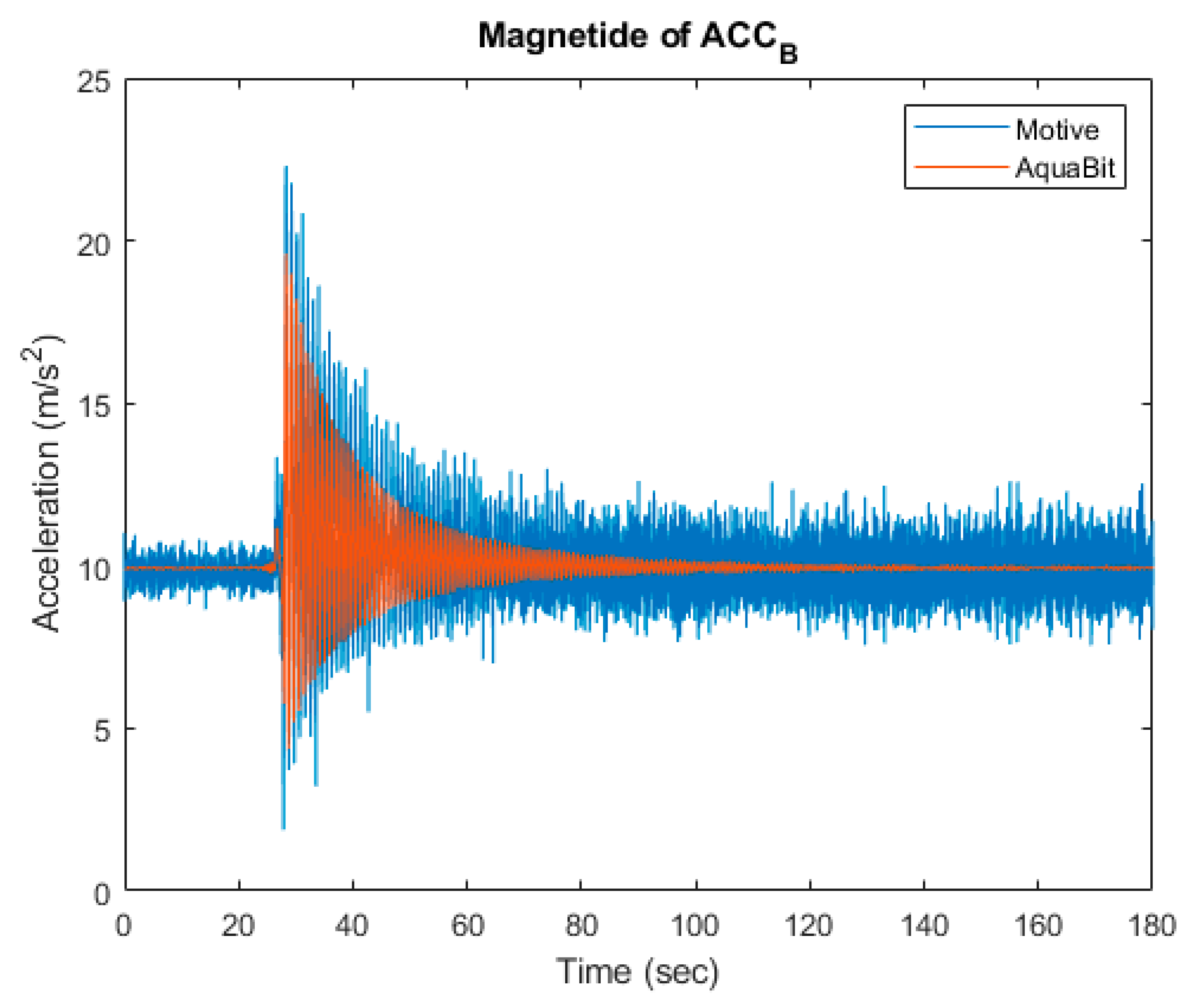
3.1.1. Inertial Measurement Unit
- The cameras’ FPS was set to be the same as the sampling frequency of the IMU (100 Hz).
- The device was configured with the time and the IMU sampling frequency via the NFC Android application developed. Then, after placing the device in the specific orientation for the test, a start data recording command was sent to it.
- In the Motive software, a recording was initiated, and the time was noted to be correlated with the data from the device.
- The pendulum was pulled and then set free to oscillate until coming to a rest. This period was recorded in the Motive software and inside the device.
- The data from the device were downloaded for comparison.
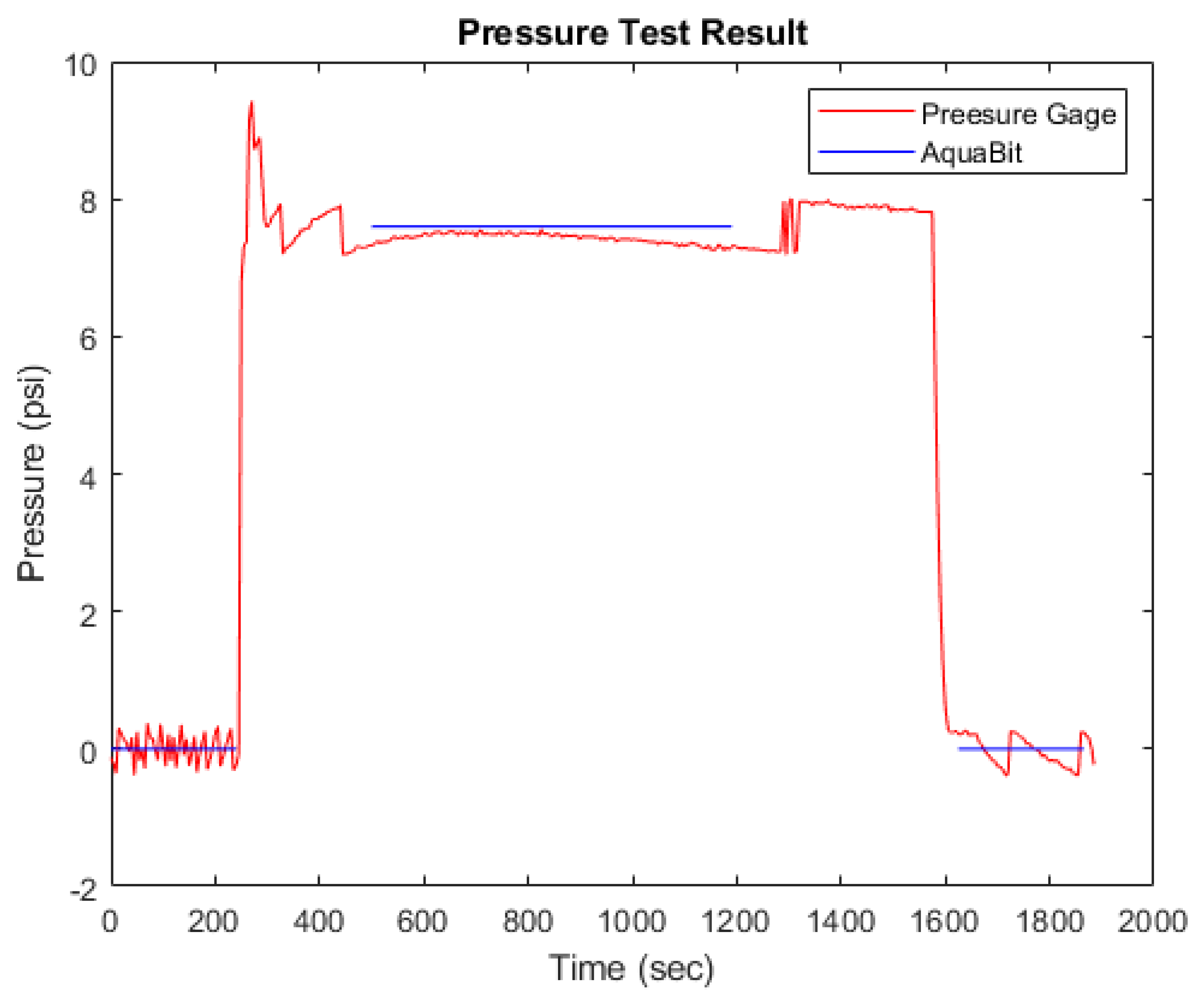
3.1.2. Pressure Sensor
3.1.3. Light Sensor
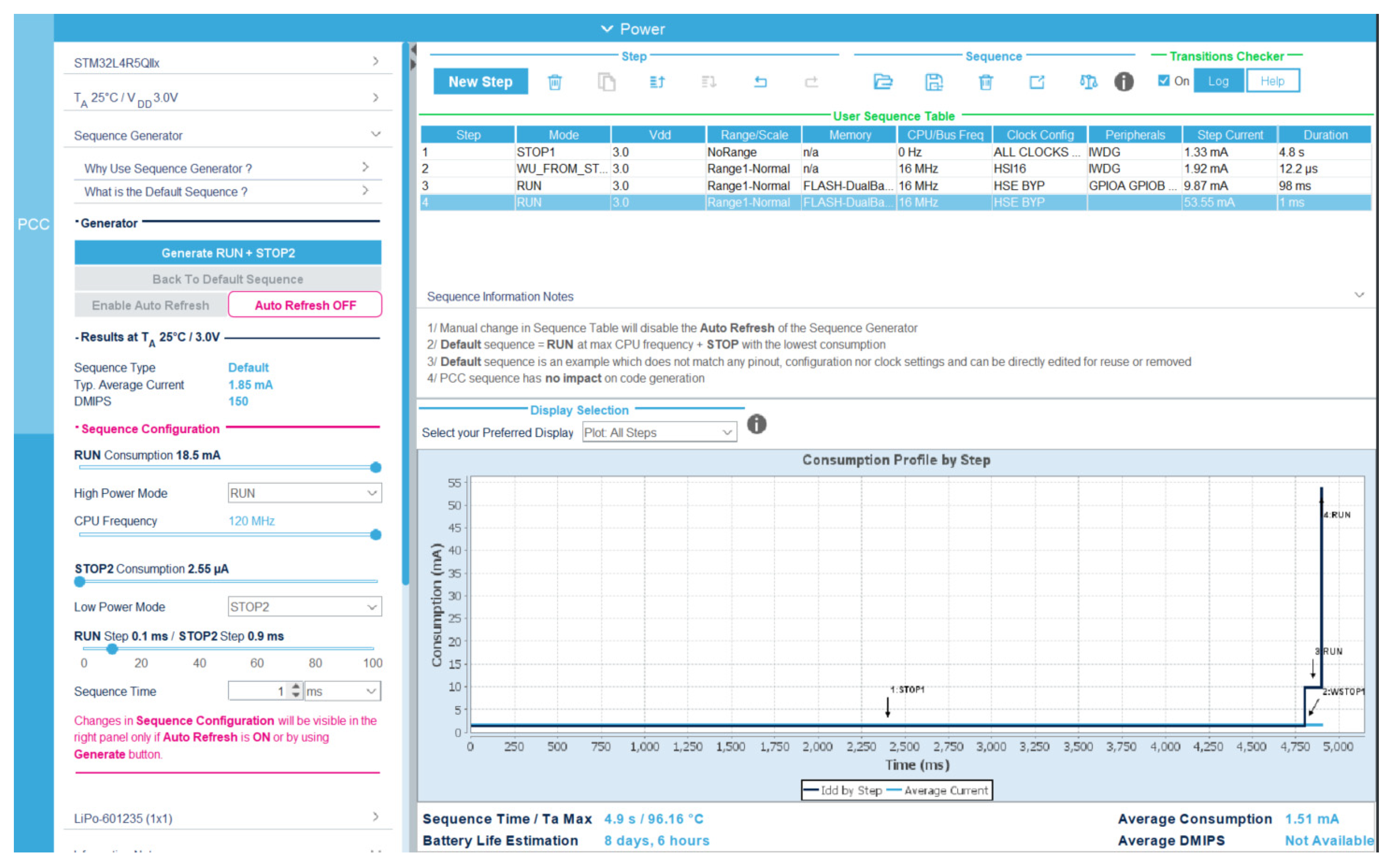
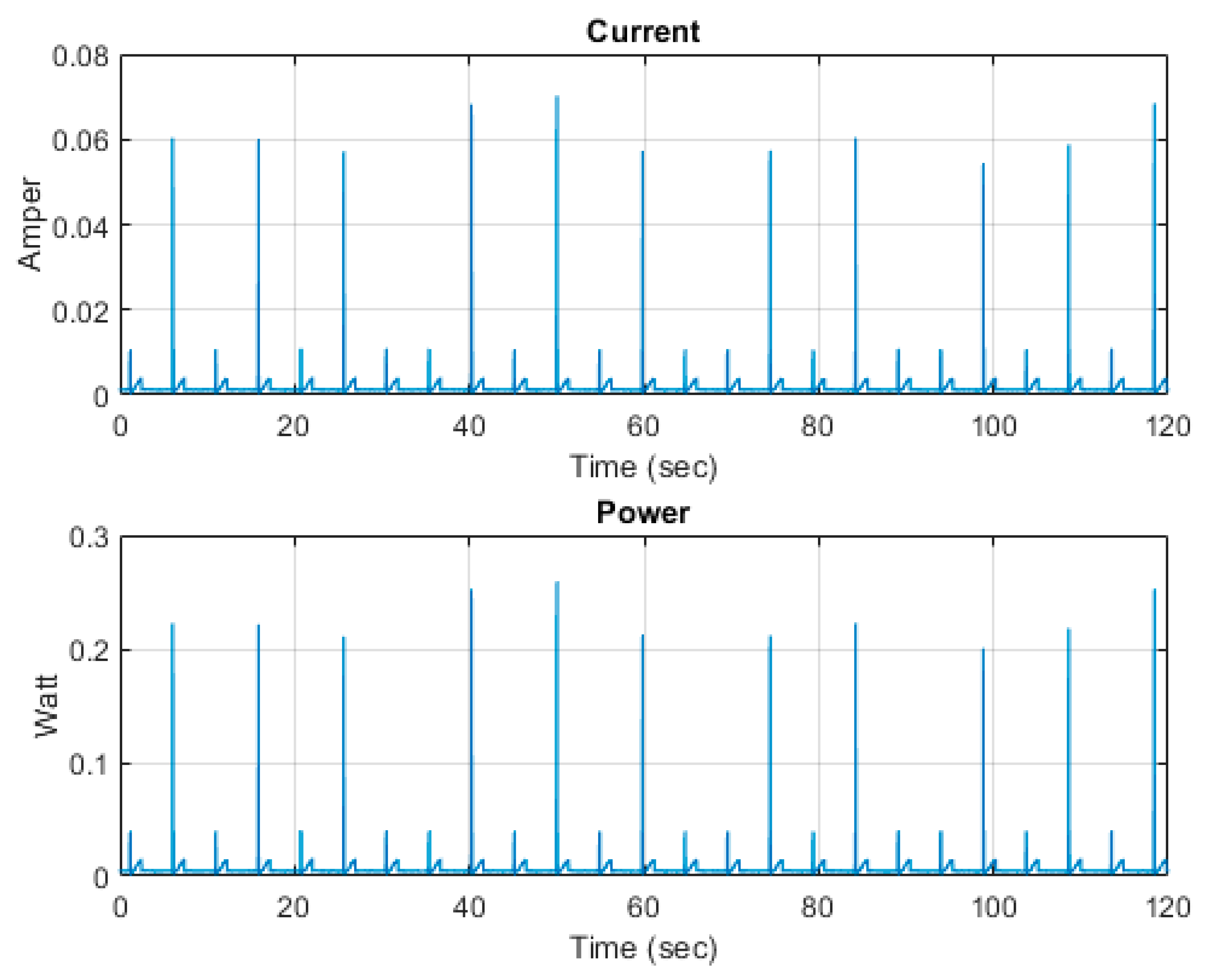
3.2. Power Consumption
4. Discussion
Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chopin, T.; Buschmann, A.H.; Halling, C.; Troell, M.; Kautsky, N.; Neori, A.; Kraemer, G.P.; Zertuche-González, J.A.; Yarish, C.; Neefus, C. Integrating Seaweeds into Marine Aquaculture Systems: A Key Toward Sustainability. J. Phycol. 2001, 37, 975–986. [Google Scholar] [CrossRef]
- Ridler, N.; Wowchuk, M.; Robinson, B.; Barrington, K.; Chopin, T.; Robinson, S.; Page, F.; Reid, G.; Szemerda, M.; Sewuster, J.; et al. Integrated Multi—Trophic Aquaculture (Imta): A Potential Strategic Choice for Farmers. Aquac. Econ. Manag. 2007, 11, 99–110. [Google Scholar] [CrossRef]
- Schroeder, S.B.; Dupont, C.; Boyer, L.; Juanes, F.; Costa, M. Passive Remote Sensing Technology for Mapping Bull Kelp (Nereocystis Luetkeana): A Review of Techniques and Regional Case Study. Glob. Ecol. Conserv. 2019, 19, e00683. [Google Scholar] [CrossRef]
- Bennion, M.; Fisher, J.; Yesson, C.; Brodie, J. Remote Sensing of Kelp (Laminariales, Ochrophyta): Monitoring Tools and Implications for Wild Harvesting. Rev. Fish. Sci. Aquac. 2019, 27, 127–141. [Google Scholar] [CrossRef]
- Ottinger, M.; Clauss, K.; Kuenzer, C. Aquaculture: Relevance, Distribution, Impacts and Spatial Assessments—A Review. Ocean Coast. Manag. 2016, 119, 244–266. [Google Scholar] [CrossRef]
- Meneghesso, C.; Seabra, R.; Broitman, B.R.; Wethey, D.S.; Burrows, M.T.; Chan, B.K.K.; Guy-Haim, T.; Ribeiro, P.A.; Rilov, G.; Santos, A.M.; et al. Remotely-Sensed L4 SST Underestimates the Thermal Fingerprint of Coastal Upwelling. Remote Sens. Environ. 2020, 237, 111588. [Google Scholar] [CrossRef]
- Woo, H.-J.; Park, K.-A. Inter-Comparisons of Daily Sea Surface Temperatures and In-Situ Temperatures in the Coastal Regions. Remote Sens. 2020, 12, 1592. [Google Scholar] [CrossRef]
- Brewin, R.J.W.; Smale, D.A.; Moore, P.J.; Dall’Olmo, G.; Miller, P.I.; Taylor, B.H.; Smyth, T.J.; Fishwick, J.R.; Yang, M. Evaluating Operational AVHRR Sea Surface Temperature Data at the Coastline Using Benthic Temperature Loggers. Remote Sens. 2018, 10, 925. [Google Scholar] [CrossRef]
- Hurd, C.L. Water Motion, Marine Macroalgal Physiology, and Production. J. Phycol. 2000, 36, 453–472. [Google Scholar] [CrossRef]
- Visch, W.; Nylund, G.M.; Pavia, H. Growth and Biofouling in Kelp Aquaculture (Saccharina Latissima): The Effect of Location and Wave Exposure. J. Appl. Phycol. 2020, 32, 3199–3209. [Google Scholar] [CrossRef]
- Kregting, L.; Blight, A.J.; Elsäßer, B.; Savidge, G. The Influence of Water Motion on the Growth Rate of the Kelp Laminaria Digitata. J. Exp. Mar. Biol. Ecol. 2016, 478, 86–95. [Google Scholar] [CrossRef]
- Bekkby, T.; Rinde, E.; Gundersen, H.; Norderhaug, K.M.; Gitmark, J.K.; Christie, H. Length, Strength and Water Flow: Relative Importance of Wave and Current Exposure on Morphology in Kelp Laminaria Hyperborea. Mar. Ecol. Prog. Ser. 2014, 506, 61–70. [Google Scholar] [CrossRef][Green Version]
- Burrows, M.T.; Harvey, R.; Robb, L. Wave Exposure Indices from Digital Coastlines and the Prediction of Rocky Shore Community Structure. Mar. Ecol. Prog. Ser. 2008, 353, 1–12. [Google Scholar] [CrossRef]
- Focht, R.C.; Shima, J.S. Acceleration Loggers Reveal Fine-Scale Heterogeneity in Wave Exposure along an Open Coast. Estuar. Coast. Shelf Sci. 2020, 233, 106507. [Google Scholar] [CrossRef]
- Fan, L.I.N.; Meirong, D.U.; Hui, L.I.U.; Jianguang, F.A.N.G.; Lars, A.; Zengjie, J.I.A.N.G. A Physical-Biological Coupled Ecosystem Model for Integrated Aquaculture of Bivalve and Seaweed in Sanggou Bay. Ecol. Model. 2020, 431, 109181. [Google Scholar] [CrossRef]
- Kerrison, P.D.; Stanley, M.S.; Edwards, M.D.; Black, K.D.; Hughes, A.D. The Cultivation of European Kelp for Bioenergy: Site and Species Selection. Biomass Bioenergy 2015, 80, 229–242. [Google Scholar] [CrossRef]
- El Mahrad, B.; Newton, A.; Icely, J.D.; Kacimi, I.; Abalansa, S.; Snoussi, M. Contribution of Remote Sensing Technologies to a Holistic Coastal and Marine Environmental Management Framework: A Review. Remote Sens. 2020, 12, 2313. [Google Scholar] [CrossRef]
- García-Poza, S.; Leandro, A.; Cotas, C.; Cotas, J.; Marques, J.C.; Pereira, L.; Gonçalves, A.M.M. The Evolution Road of Seaweed Aquaculture: Cultivation Technologies and the Industry 4.0. Int. J. Environ. Res. Public Health 2020, 17, 6528. [Google Scholar] [CrossRef]
- Evans, S.N.; Abdo, D.A. A Cost-Effective Technique for Measuring Relative Water Movement for Studies of Benthic Organisms. Mar. Freshw. Res. 2010, 61, 1327–1335. [Google Scholar] [CrossRef]
- HOBO Pendant Temperature/Light Data Logger 64K. Available online: https://www.onsetcomp.com/products/data-loggers/ua-002-64 (accessed on 17 June 2021).
- Lyman, T.P.; Elsmore, K.; Gaylord, B.; Byrnes, J.E.K.; Miller, L.P. Open Wave Height Logger: An Open Source Pressure Sensor Data Logger for Wave Measurement. Limnol. Oceanogr. Methods 2020, 18, 335–345. [Google Scholar] [CrossRef]
- Kennedy, D.; Cullen, E.; McNulty, R.; Gaffney, M.; Walsh, M.; O’Flynn, B. Marine Inertial Measurement Units: Communication, Capabilities, and Challenges. Mar. Technol. Soc. J. 2015, 49, 56–63. [Google Scholar] [CrossRef]
- Judge, R.; Choi, F.; Helmuth, B. Recent Advances in Data Logging for Intertidal Ecology. Front. Ecol. Evol. 2018, 6, 213. [Google Scholar] [CrossRef]
- IButton—IButton Devices—One Wire|Maxim Integrated. Available online: https://www.maximintegrated.com/en/products/ibutton-one-wire/ibutton.html (accessed on 22 June 2021).
- TidbiT v2 Temperature Data Logger—UTBI-001. Available online: https://www.onsetcomp.com/products/data-loggers/utbi-001 (accessed on 22 June 2021).
- Knight, P.; Bird, C.; Sinclair, A.; Higham, J.; Plater, A. Testing an “IoT” Tide Gauge Network for Coastal Monitoring. IoT 2021, 2, 17–32. [Google Scholar] [CrossRef]
- Beddows, P.A.; Mallon, E.K. Cave Pearl Data Logger: A Flexible Arduino-Based Logging Platform for Long-Term Monitoring in Harsh Environments. Sensors 2018, 18, 530. [Google Scholar] [CrossRef]
- LTC2955 Datasheet and Product Info|Analog Devices. Available online: https://www.analog.com/en/products/ltc2955.html# (accessed on 27 May 2021).
- STM32L4R5/S5—STMicroelectronics. Available online: https://www.st.com/en/microcontrollers-microprocessors/stm32l4r5-s5.html (accessed on 27 May 2021).
- EEMBC—CPU/MCU Performance Benchmark—CoreMark. Available online: https://www.eembc.org/coremark/scores.php (accessed on 27 May 2021).
- EEMBC—CPU/MCU Energy Benchmark—ULPMark. Available online: https://www.eembc.org/ulpmark/ulp-cp/scores.php (accessed on 27 May 2021).
- Lambo, L.; Shengli, Z.; Jun-Hong, C. Prospects and Problems of Wireless Communication for Underwater Sensor Networks. Wirel. Commun. Mob. Comput. 2008, 8, 977–994. [Google Scholar] [CrossRef]
- Gussen, C.M.G.; Diniz, P.S.R.; Campos, M.L.R.; Martins, W.A.; Costa, F.M.; Gois, J.N. A Survey of Underwater Wireless Communication Technologies. JCIS 2016, 31, 242–255. [Google Scholar] [CrossRef]
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-Evaluation of RF Electromagnetic Communication in Underwater Sensor Networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Domingo, M.C. Magnetic Induction for Underwater Wireless Communication Networks. IEEE Trans. Antennas Propag. 2012, 60, 2929–2939. [Google Scholar] [CrossRef]
- Peres, C.; Pigeon, M.; Rather, N.; Gawade, D.; Buckley, J.; Jafarzadeh, H.; O’Flynn, B. Theoretical Models for Underwater RFID and the Impact of Water Salinity on the Design of Wireless Systems. Int. J. Adv. Netw. Serv. 2020, 13, 45–59. [Google Scholar]
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; Wiley: Hoboken, NJ, USA, 2014; ISBN 978-1-119-99187-8. [Google Scholar]
- Coskun, V.; Ozdenizci, B.; Ok, K. A Survey on Near Field Communication (NFC) Technology. Wirel. Pers. Commun. 2013, 71, 2259–2294. [Google Scholar] [CrossRef]
- European Computer Manufacturers Association. ECMA340—Near Field Communication Interface and Protocol (NFCIP-1); European Computer Manufacturers Association: Geneva, Switzerland, 2004. [Google Scholar]
- STMicroelectronics ST25DV04K—Datasheet 2018. Available online: https://www.st.com/resource/en/datasheet/st25dv04k.pdf (accessed on 1 September 2020).
- NFC Antenna EDesignSuite—STMicroelectronics. Available online: https://eds.st.com/antenna/ (accessed on 1 September 2020).
- STMicroelectronics AN2866—How to Design a 13.56 MHz Customized Antenna for ST25 NFC/RFID Tags 2020. Available online: https://www.st.com/content/ccc/resource/technical/document/application_note/d9/29/ad/cc/04/7c/4c/1e/CD00221490.pdf/files/CD00221490.pdf/jcr:content/translations/en.CD00221490.pdf (accessed on 1 September 2020).
- STSW-ST25SDK001—Software Development Kit for ST25 Tags and Dynamic Tags—STMicroelectronics. Available online: https://www.st.com/en/embedded-software/stsw-st25sdk001.html (accessed on 31 May 2021).
- PyUSB. Available online: https://pyusb.github.io/pyusb/ (accessed on 31 May 2021).
- UM1734—STM32CubeTM USB Device Library User Manual 2019. Available online: https://www.st.com/resource/en/user_manual/dm00108129-stm32cube-usb-device-library-stmicroelectronics.pdf (accessed on 20 January 2021).
- IMPAQT Project. Available online: https://impaqtproject.eu/about-impaqt/ (accessed on 1 September 2020).
- Primex 13—Specs. Available online: http://optitrack.com/cameras/primex-13/specs.html (accessed on 31 May 2021).
- Motive—Optical Motion Capture Software. Available online: http://www.optitrack.com/software/motive/index.html (accessed on 20 May 2021).
- Calibration—NaturalPoint Product Documentation Ver 2.2. Available online: https://v22.wiki.optitrack.com/index.php?title=Calibration (accessed on 20 May 2021).
- MATLAB—MathWorks. Available online: https://www.mathworks.com/products/matlab.html (accessed on 31 May 2021).
- Kim, A.; Golnaraghi, M.F. Initial Calibration of an Inertial Measurement Unit Using an Optical Position Tracking System. In Proceedings of the PLANS 2004. Position Location and Navigation Symposium (IEEE Cat. No.04CH37556), Monterey, CA, USA, 26–29 April 2004; pp. 96–101. [Google Scholar]
- Our Ocean: Our Livelihoods|Marine Institute. Available online: https://www.marine.ie/Home/site-area/areas-activity/education-outreach/our-ocean-our-livelihoods (accessed on 31 May 2021).


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peres, C.; Emam, M.; Jafarzadeh, H.; Belcastro, M.; O’Flynn, B. Development of a Low-Power Underwater NFC-Enabled Sensor Device for Seaweed Monitoring. Sensors 2021, 21, 4649. https://doi.org/10.3390/s21144649
Peres C, Emam M, Jafarzadeh H, Belcastro M, O’Flynn B. Development of a Low-Power Underwater NFC-Enabled Sensor Device for Seaweed Monitoring. Sensors. 2021; 21(14):4649. https://doi.org/10.3390/s21144649
Chicago/Turabian StylePeres, Caroline, Masoud Emam, Hamed Jafarzadeh, Marco Belcastro, and Brendan O’Flynn. 2021. "Development of a Low-Power Underwater NFC-Enabled Sensor Device for Seaweed Monitoring" Sensors 21, no. 14: 4649. https://doi.org/10.3390/s21144649
APA StylePeres, C., Emam, M., Jafarzadeh, H., Belcastro, M., & O’Flynn, B. (2021). Development of a Low-Power Underwater NFC-Enabled Sensor Device for Seaweed Monitoring. Sensors, 21(14), 4649. https://doi.org/10.3390/s21144649