
Characterization of Degenerate Configurations in Attitude Determination of Three-Vehicle Heterogeneous Formations



Abstract
1. Introduction
2. Notation, Definitions, and Properties
3. Problem and Solution
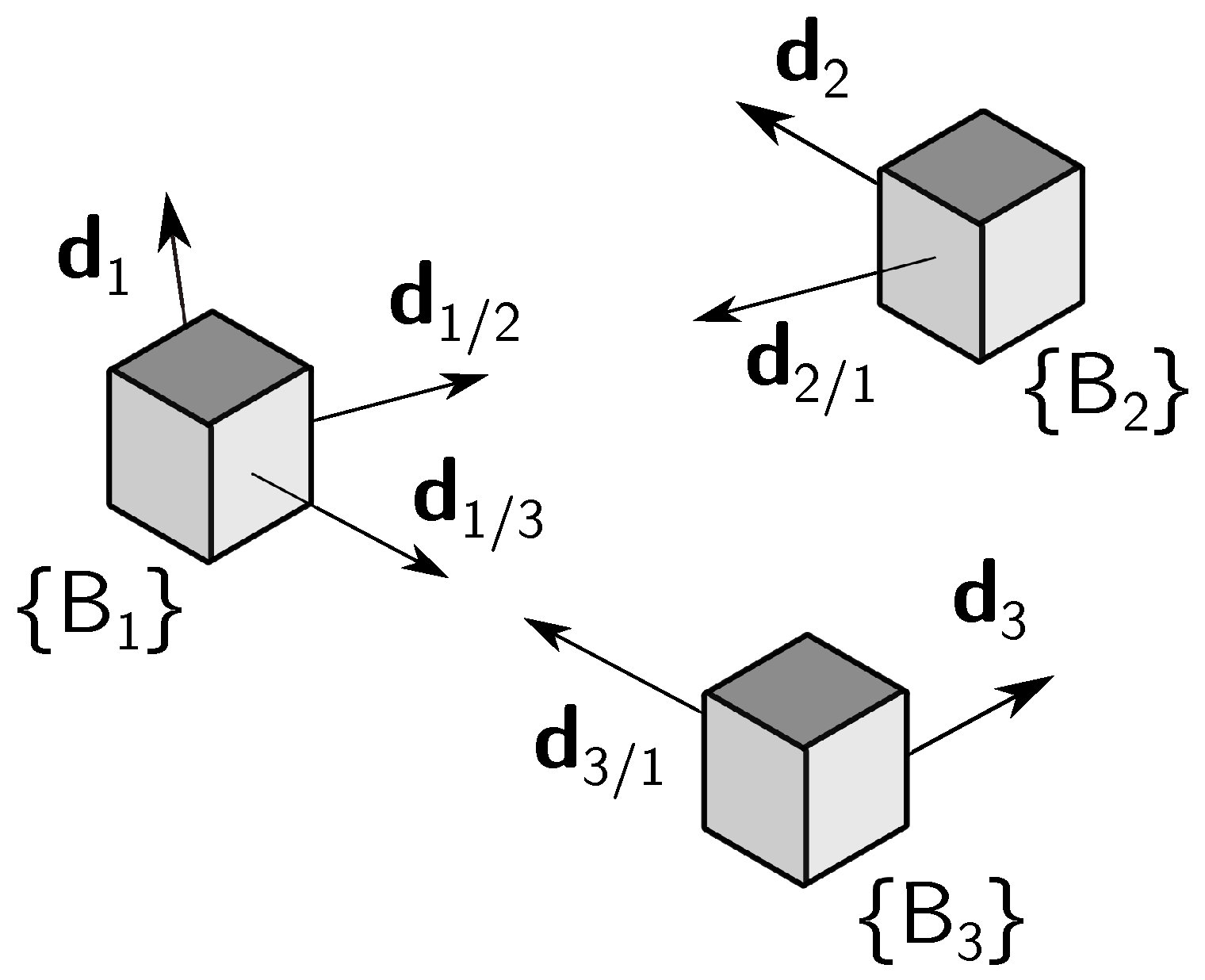
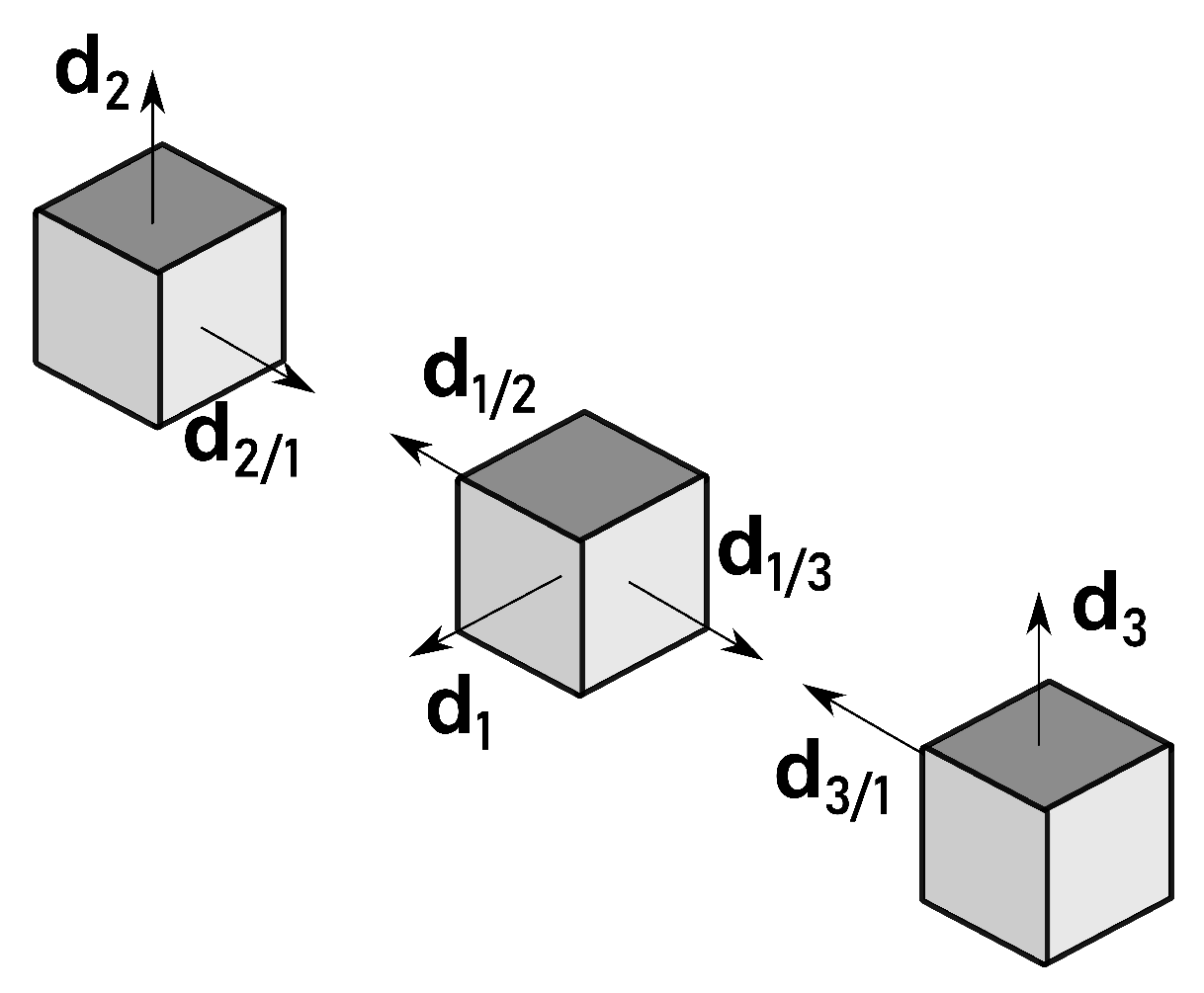
3.1. Problem Definition
3.2. Solution
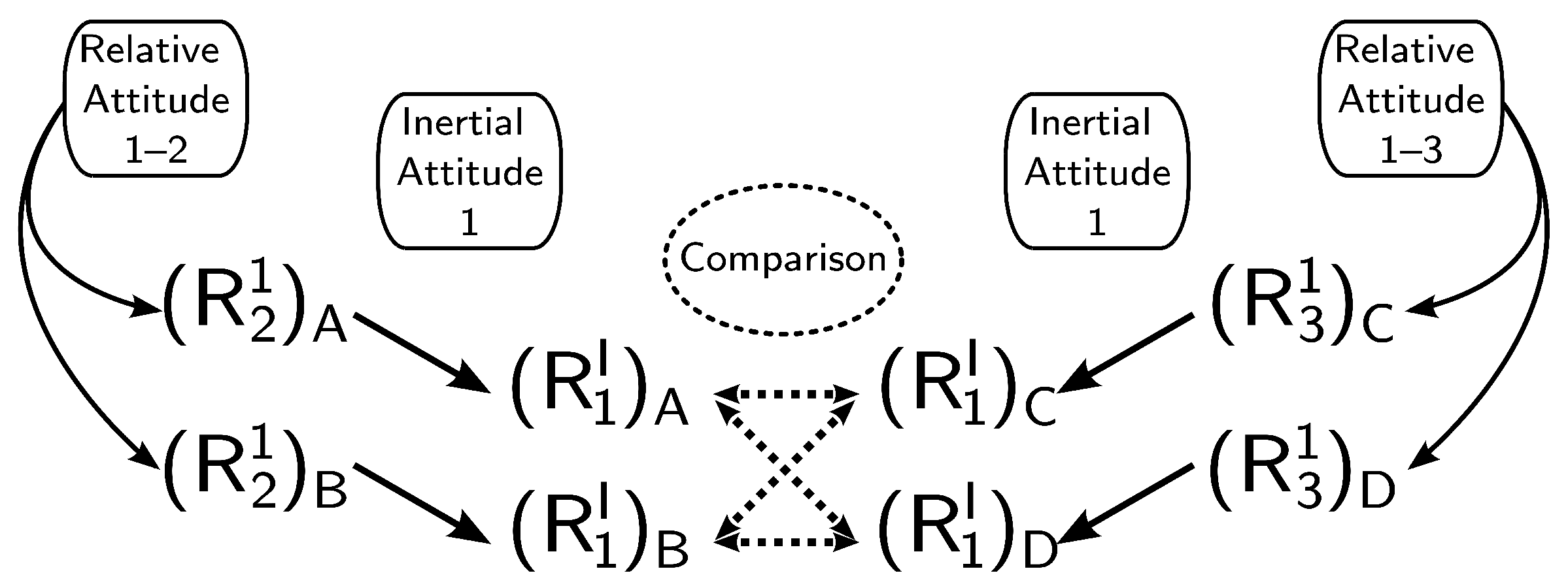
3.2.1. Relative Attitude
3.2.2. Inertial Attitude
3.2.3. Comparison
3.2.4. Complete Solution
3.2.5. Sensor Errors
3.2.6. Computational Complexity
4. Characterization
4.1. Branch Analysis
- (i)
- there are infinite solutions if and only ifor
- (ii)
- the solution is unique if and only ifwhileand;
- (iii)
- otherwise, there are two solutions.
- (i)
- Consider that (24a) or (24b) are verified. Then, [13] (Lemma 3) ensures that there are infinite solutions for . Otherwise, consider that neither (24a) nor (24b) are verified. Then, it follows from Lemma 1 that either or , or both. In any case, (8)–(13) are all well-defined and there are, at most, two solutions for , i.e., a finite number of solutions. By contra-position, if there are infinite solutions for , either (24a) or (24b) must be satisfied, thus completing the first part of the proof.
- (ii)
- Assume that neither (24a) nor (24b) are verified, then is always defined. Since (2) is periodic relative to the angle, with period , it is concluded, from (11a), that has a unique solution if and only if
- (iii)
- All other cases result in two solutions for , because they yield two distinct values for , considering their representation in the same interval, as concluded from the inspection of (11a). Hence, the proof is complete.
4.2. Formation Analysis
4.2.1. Configurations with Infinite Solutions
4.2.2. Configurations with Two Solutions
4.2.3. Configurations with One Solution
4.3. Symmetry Analysis
4.3.1. Relation between Measurements of the Same Branch
4.3.2. Relation between Same Type of Measurement
4.3.3. Ambiguous Conditions
- and ;
- and ;
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- .
4.3.4. Geometric Interpretation
4.3.5. Ambiguous Configurations Subset Measure
4.4. Discussion of Results
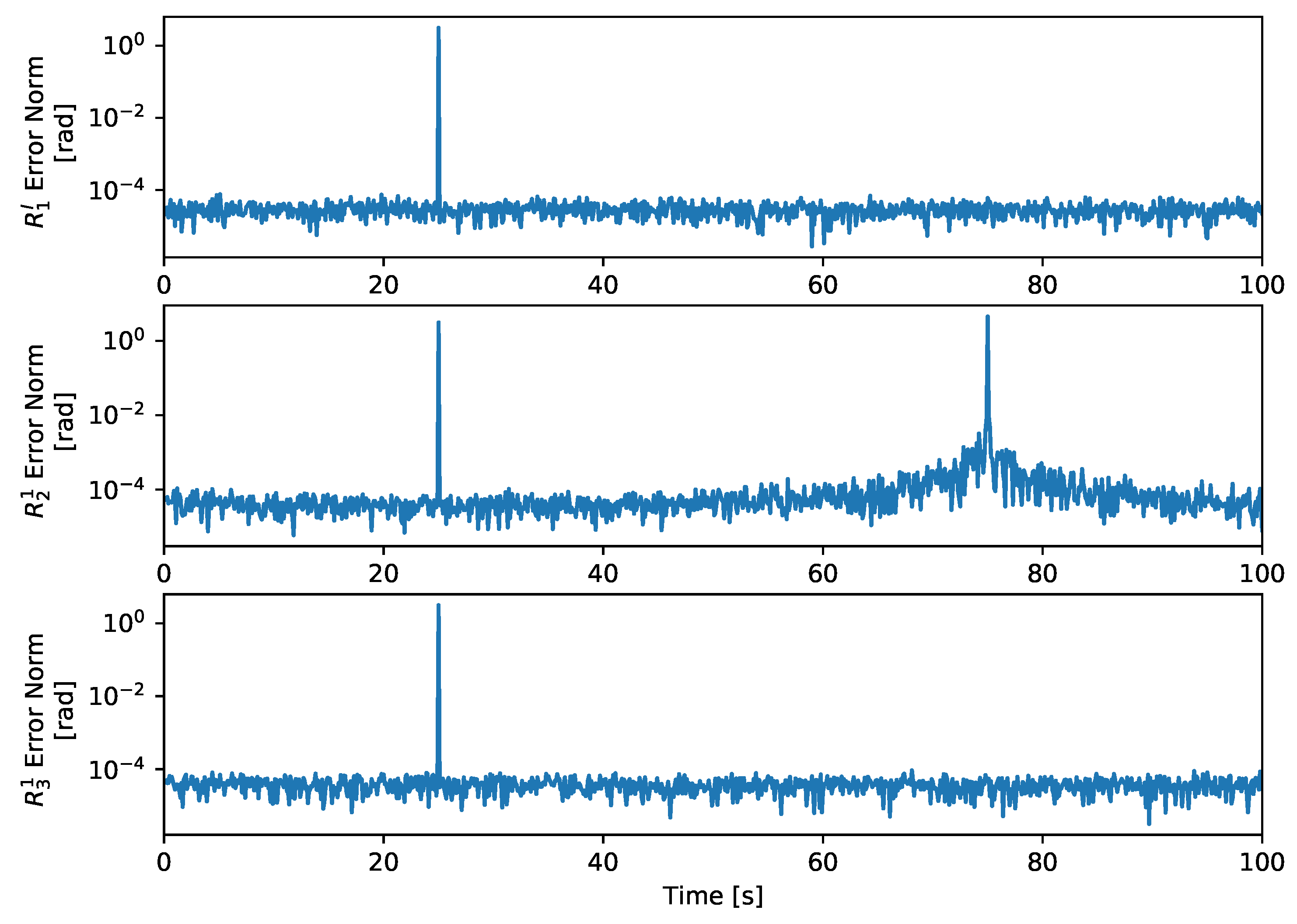
5. Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| TRIAD | Tri-Axial Attitude Determination |
| QUEST | Quaternion Estimator |
| FLAE | Fast linear quaternion attitude estimator |
| LOS | Line-of-sight |
| GPS | Global Positioning System |
| SVD | Singular value decomposition |
Appendix A. Bisecting Plane Properties
Appendix B. Technical Lemma
Appendix C. Relation between Measurements of the Same Branch
Appendix D. Relation between Same Type of Measurement
References
- Black, H.D. A passive system for determining the attitude of a satellite. AIAA J. 1964, 2, 1350–1351. [Google Scholar] [CrossRef]
- Wahba, G. A Least Squares Estimate of Satellite Attitude. SIAM Rev. 1965, 7, 409. [Google Scholar] [CrossRef]
- Shuster, M.D.; Oh, S.D. Three-axis attitude determination from vector observations. J. Guid. Control 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Gao, B.; Li, R.; Cheng, Y.; Fourati, H. Fast Linear Quaternion Attitude Estimator Using Vector Observations. IEEE Trans. Autom. Sci. Eng. 2018, 15, 307–319. [Google Scholar] [CrossRef]
- Cao, Y.; Fukunaga, A.; Kahng, A.; Meng, F. Cooperative mobile robotics: Antecedents and directions. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; Volume 1, pp. 226–234. [Google Scholar] [CrossRef]
- Stilwell, D.J.; Bishop, B.E. Platoons of underwater vehicles. IEEE Control Syst. 2000, 20, 45–52. [Google Scholar] [CrossRef]
- DeGarmo, M.; Nelson, G. Prospective Unmanned Aerial Vehicle Operations in the Future National Airspace System. In Proceedings of the AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum, Chicago, IL, USA, 20–22 September 2004; American Institute of Aeronautics and Astronautics: Chicago, IL, USA, 2004. [Google Scholar] [CrossRef]
- Murray, R.M. Recent Research in Cooperative Control of Multivehicle Systems. J. Dyn. Syst. Meas. Control 2007, 129, 571–583. [Google Scholar] [CrossRef]
- Andrle, M.S.; Crassidis, J.L.; Linares, R.; Cheng, Y.; Hyun, B. Deterministic Relative Attitude Determination of Three-Vehicle Formations. J. Guid. Control Dyn. 2009, 32, 1077–1088. [Google Scholar] [CrossRef][Green Version]
- Wang, J.; Zhang, R.; Yuan, J.; Luo, J. Multi-CubeSat Relative Position and Attitude Determination Based on Array Signal Detection in Formation Flying. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3378–3393. [Google Scholar] [CrossRef]
- Linares, R.; Crassidis, J.L.; Cheng, Y. Constrained Relative Attitude Determination for Two-Vehicle Formations. J. Guid. Control Dyn. 2011, 34, 543–553. [Google Scholar] [CrossRef]
- Wu, J. Unified Attitude Determination Problem From Vector Observations and Hand–Eye Measurements. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3941–3957. [Google Scholar] [CrossRef]
- Cruz, P.; Batista, P. A solution for the attitude determination of three-vehicle heterogeneous formations. Aerosp. Sci. Technol. 2019, 93, 105275. [Google Scholar] [CrossRef]
- Zhou, X.S.; Roumeliotis, S.I. Determining 3-D Relative Transformations for Any Combination of Range and Bearing Measurements. IEEE Trans. Robot. 2013, 29, 458–474. [Google Scholar] [CrossRef]
- Stuart, J.; Dorsey, A.; Alibay, F.; Filipe, N. Formation flying and position determination for a space-based interferometer in GEO graveyard orbit. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; IEEE: Big Sky, MT, USA, 2017; pp. 1–19. [Google Scholar] [CrossRef]
- Cesarone, R.J.; Abraham, D.S.; Deutsch, L.J. Prospects for a Next-Generation Deep-Space Network. Proc. IEEE 2007, 95, 1902–1915. [Google Scholar] [CrossRef]
- Cruz, P.; Batista, P. Special Cases in the Attitude Determination of Three-Vehicle Heterogeneous Formations. In Proceedings of the 2020 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; IEEE: Prague, Czech Republic, 2020; pp. 136–141. [Google Scholar] [CrossRef]
- Markley, F.L.; Crassidis, J.L. Fundamentals of Spacecraft Attitude Determination and Control; Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Lee, J.M. Smooth Manifolds. In Introduction to Smooth Manifolds; Lee, J.M., Ed.; Graduate Texts in Mathematics; Springer: New York, NY, USA, 2003; pp. 1–29. [Google Scholar] [CrossRef]
- Hall, B.C. Lie Groups, Lie Algebras, and Representations. In Graduate Texts in Mathematics; Springer International Publishing: Cham, Switzerland, 2015; Volume 222. [Google Scholar] [CrossRef]
- Cheng, Y.; Crassidis, J.L.; Markley, F.L. Attitude estimation for large field-of-view sensors. J. Astronaut. Sci. 2006, 54, 433–448. [Google Scholar] [CrossRef][Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degenerate | Unambiguous | Ambiguous | ||||
|---|---|---|---|---|---|---|
| Otherwise | ||||||
| Degenerate | ∞ | ∞ | ∞ | 1 | 2 | |
| ∞ | ∞ | ∞ | ∞ | ∞ | ||
| ∞ | ∞ | ∞ | 1 | 2 | ||
| Unambiguous | 1 | ∞ | 1 | 1 | 1 | |
| Ambiguous | Otherwise | 2 | ∞ | 2 | 1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cruz, P.; Batista, P. Characterization of Degenerate Configurations in Attitude Determination of Three-Vehicle Heterogeneous Formations. Sensors 2021, 21, 4631. https://doi.org/10.3390/s21144631
Cruz P, Batista P. Characterization of Degenerate Configurations in Attitude Determination of Three-Vehicle Heterogeneous Formations. Sensors. 2021; 21(14):4631. https://doi.org/10.3390/s21144631
Chicago/Turabian StyleCruz, Pedro, and Pedro Batista. 2021. "Characterization of Degenerate Configurations in Attitude Determination of Three-Vehicle Heterogeneous Formations" Sensors 21, no. 14: 4631. https://doi.org/10.3390/s21144631
APA StyleCruz, P., & Batista, P. (2021). Characterization of Degenerate Configurations in Attitude Determination of Three-Vehicle Heterogeneous Formations. Sensors, 21(14), 4631. https://doi.org/10.3390/s21144631