
A Hybrid Brain–Computer Interface for Real-Life Meal-Assist Robot Control





Abstract
:1. Introduction
2. Materials and Methods
2.1. Experiment for Measuring Performance
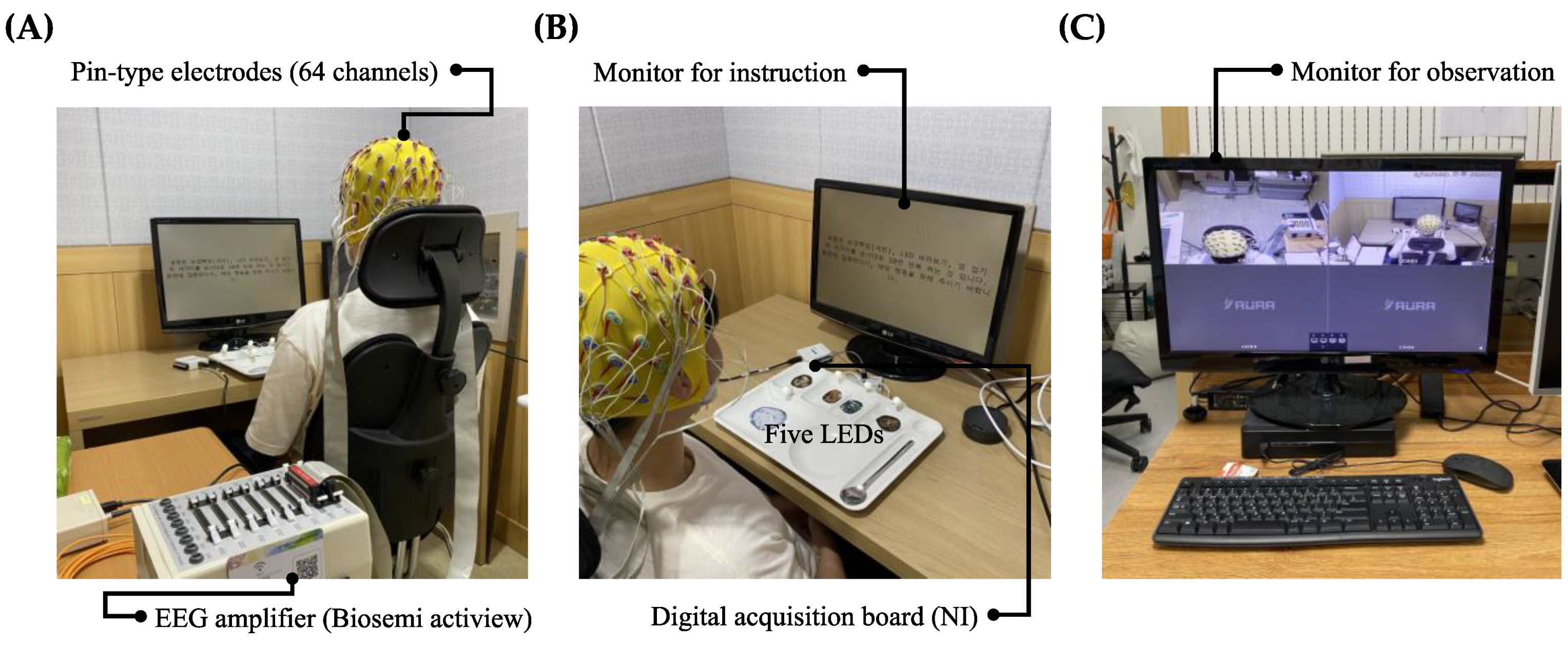
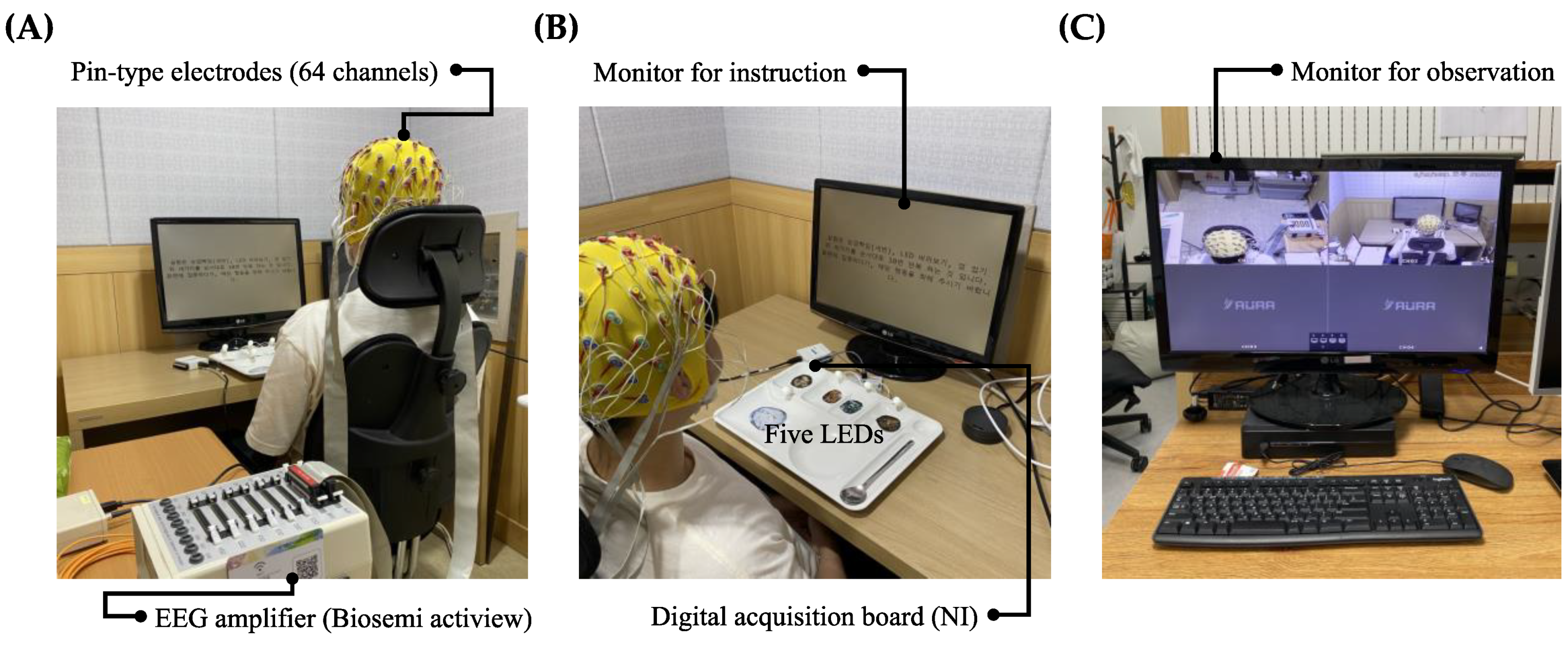
2.1.1. System Configuration
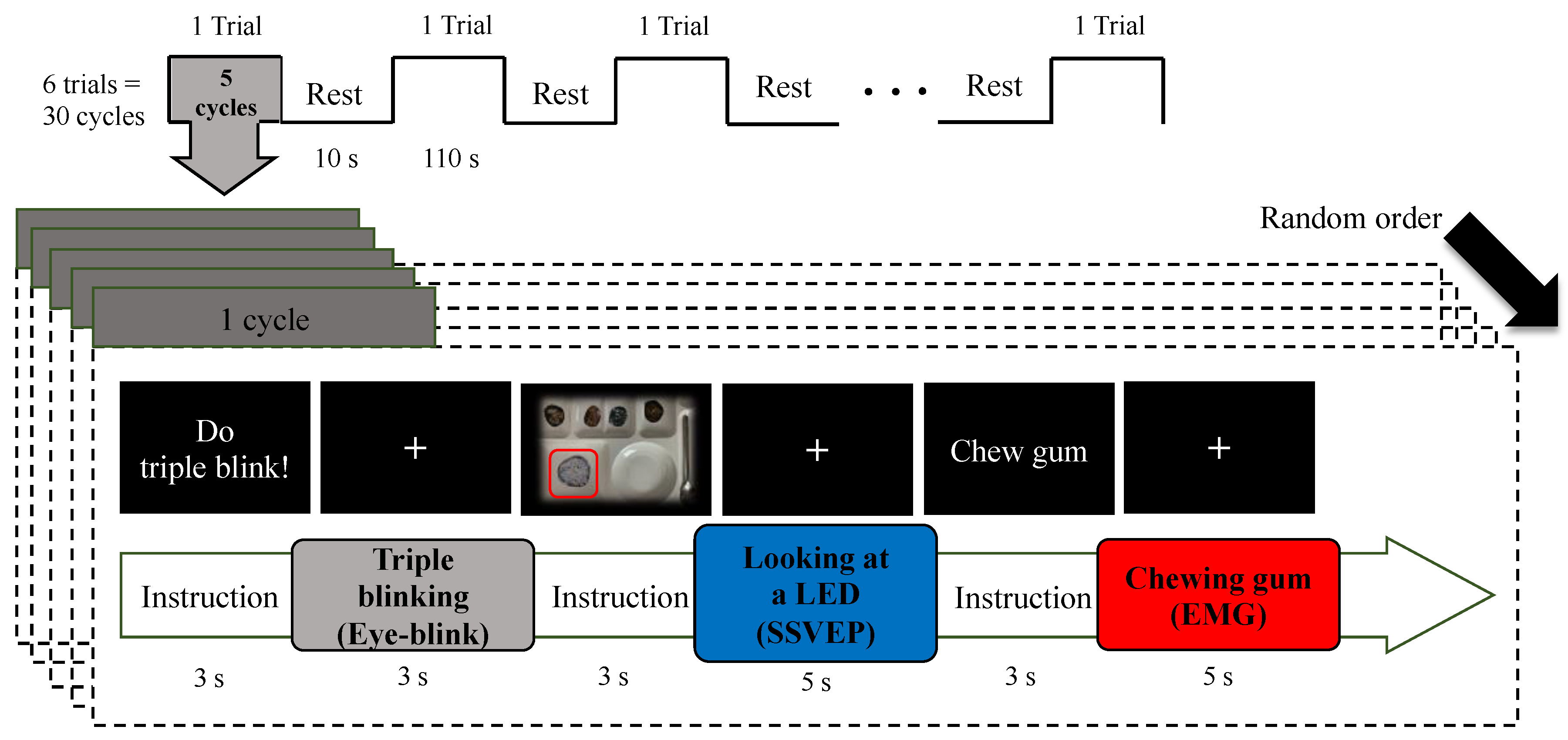
2.1.2. Experimental Protocol
2.1.3. Participants
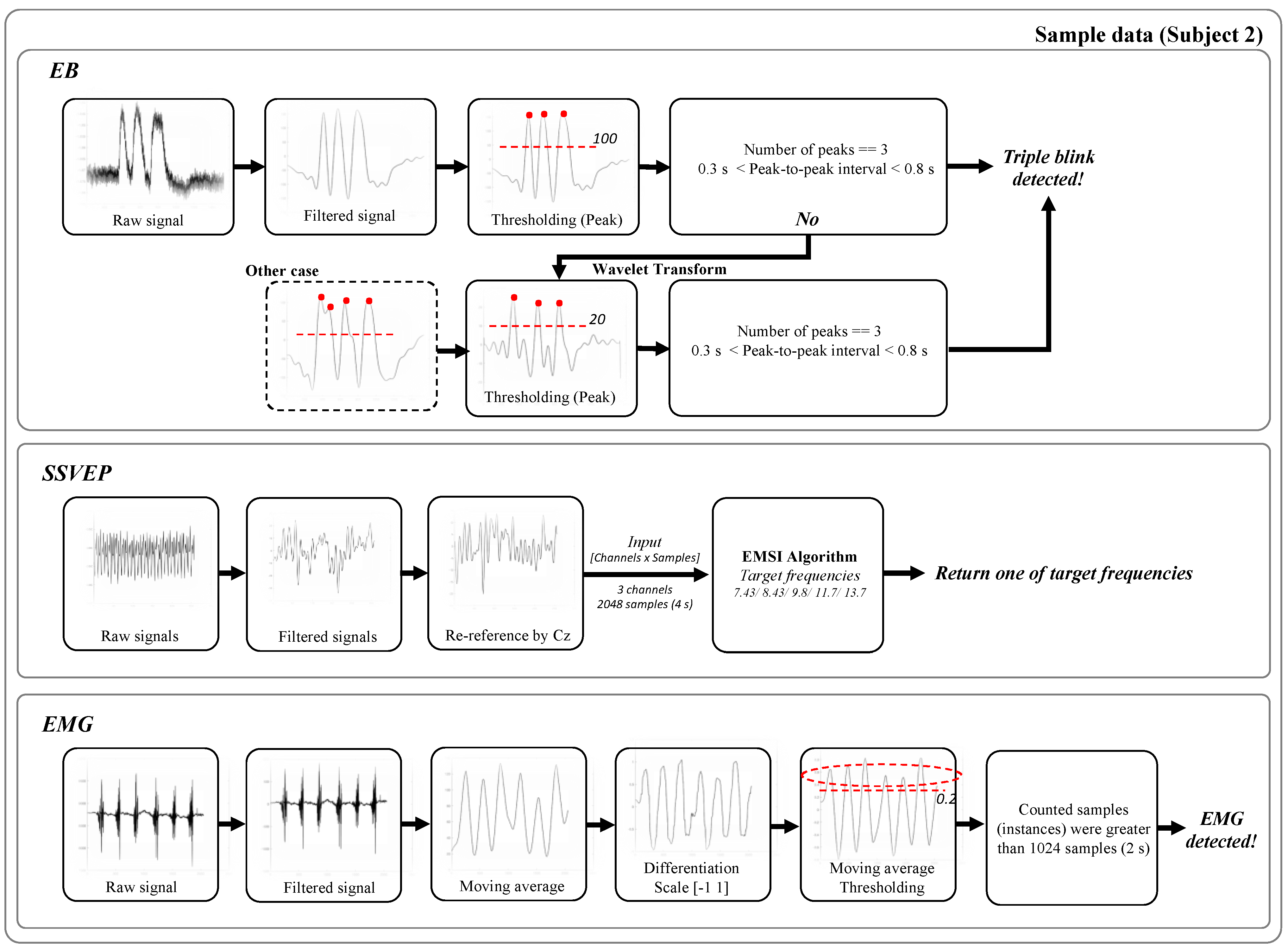
2.1.4. Data Processing and Analysis
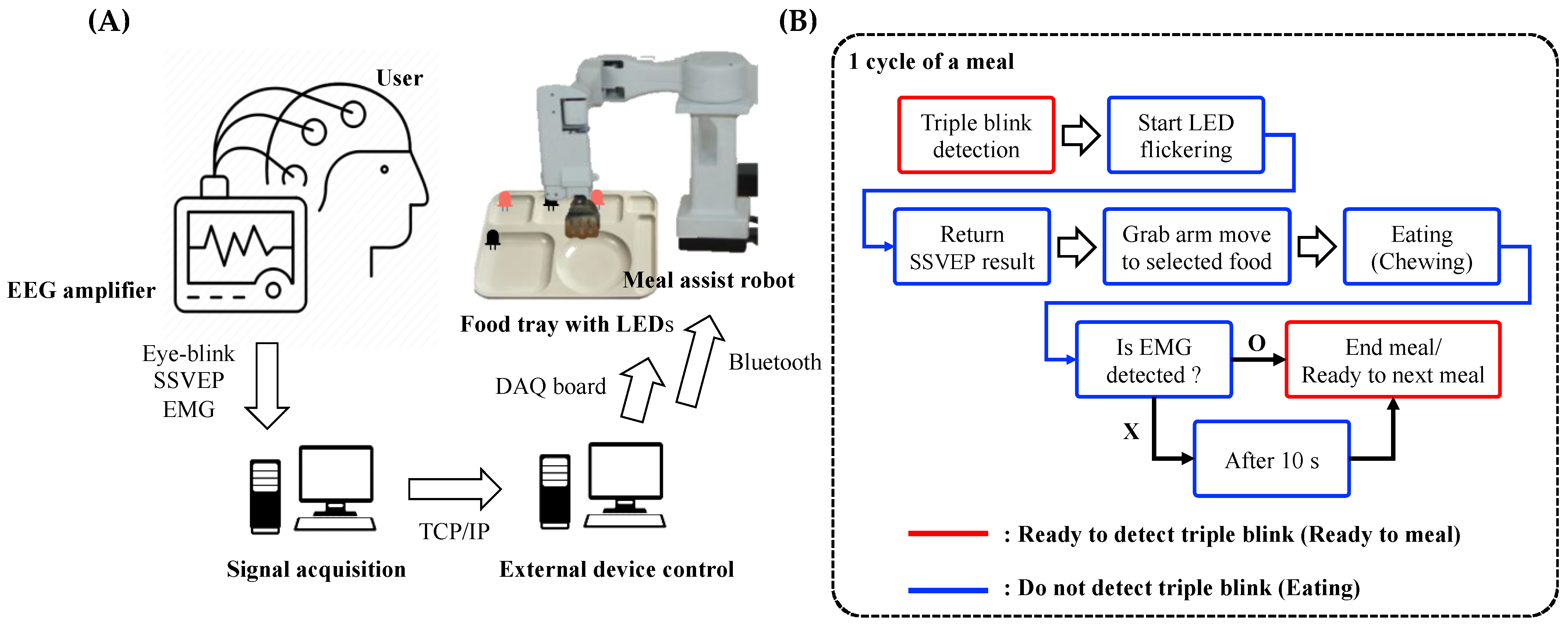
2.2. Real-Time System
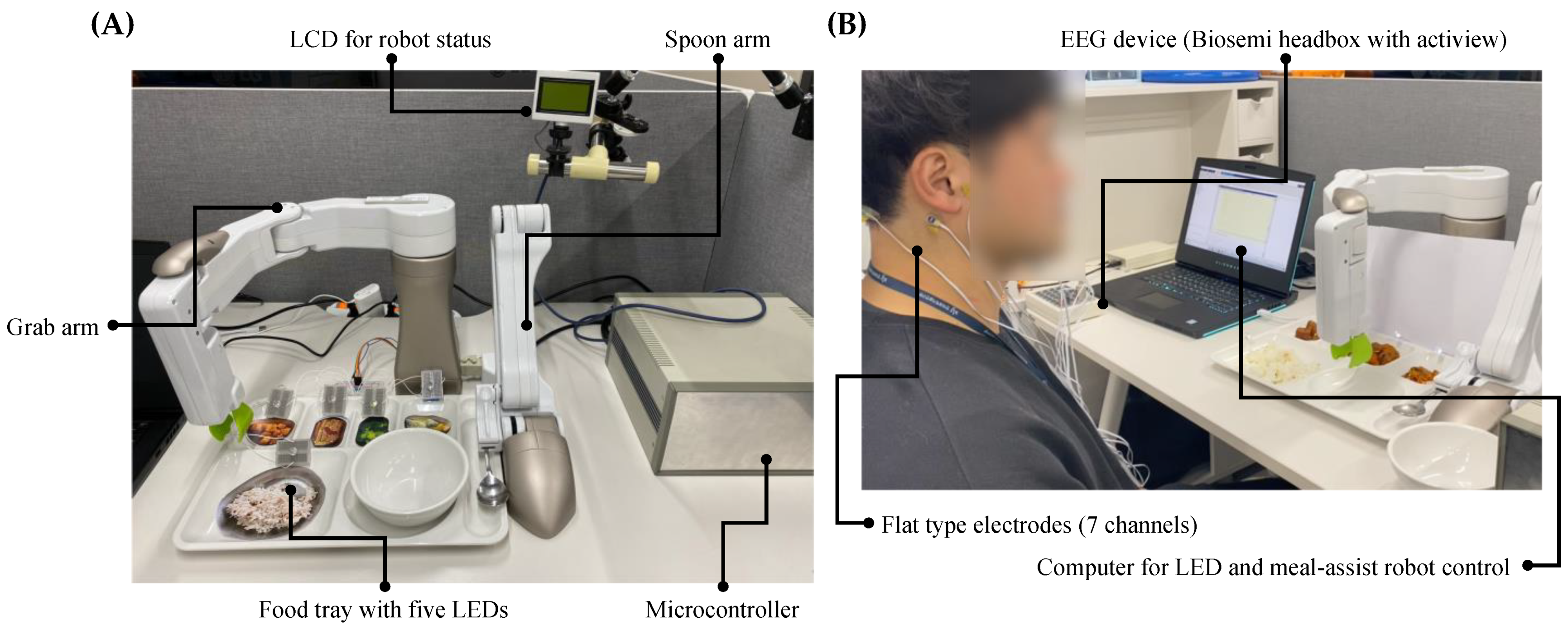
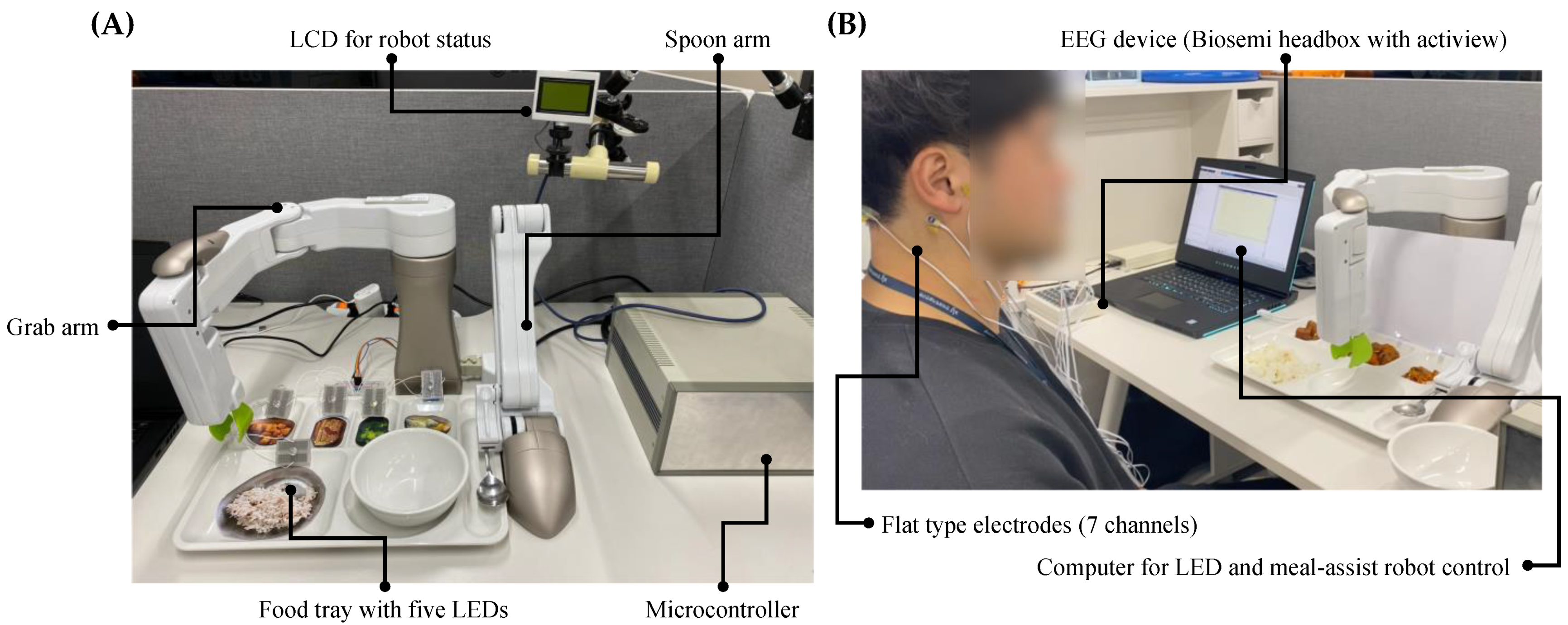
2.2.1. System Configuration
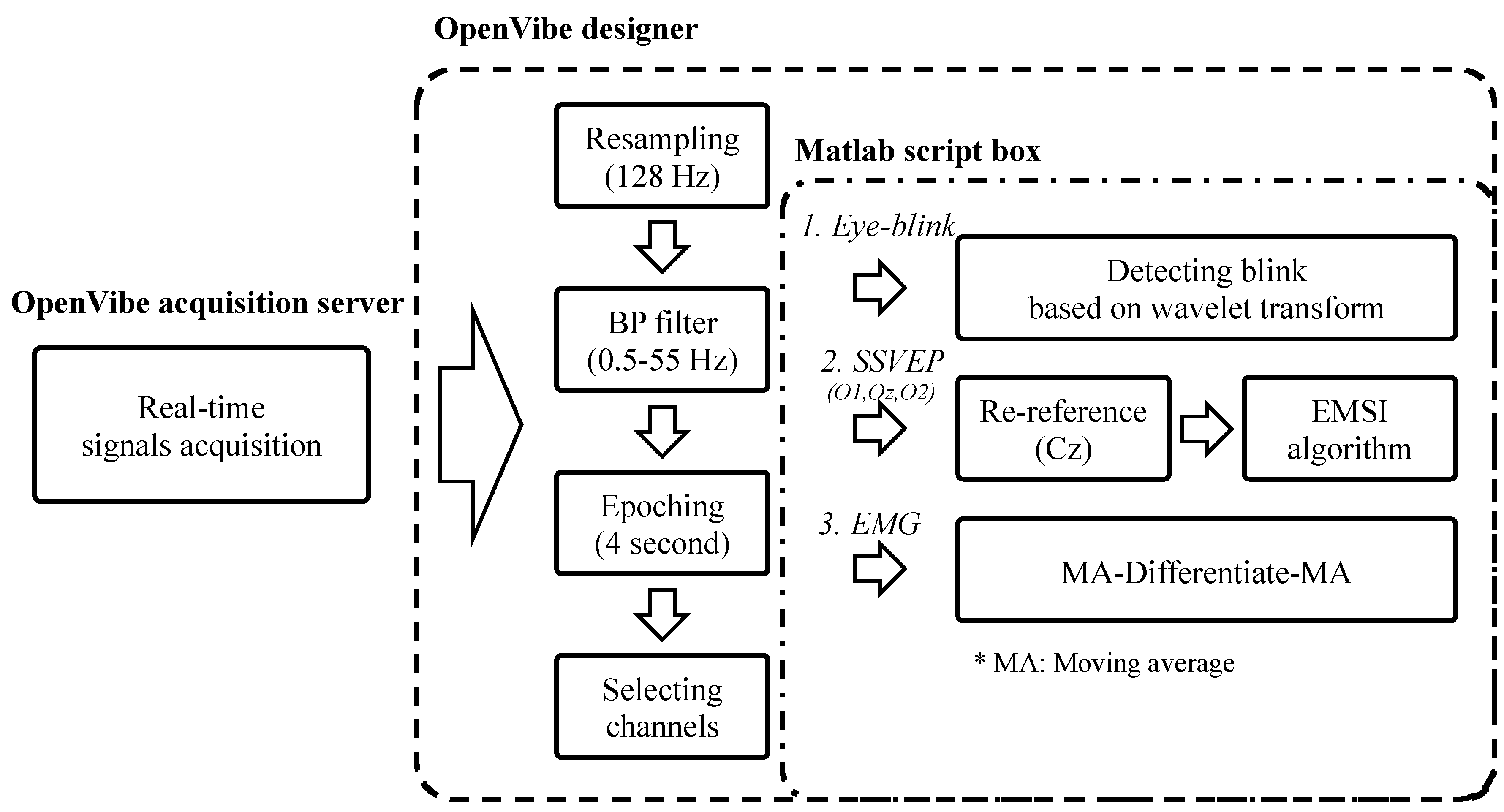
2.2.2. Data Acquisition and Processing
3. Results
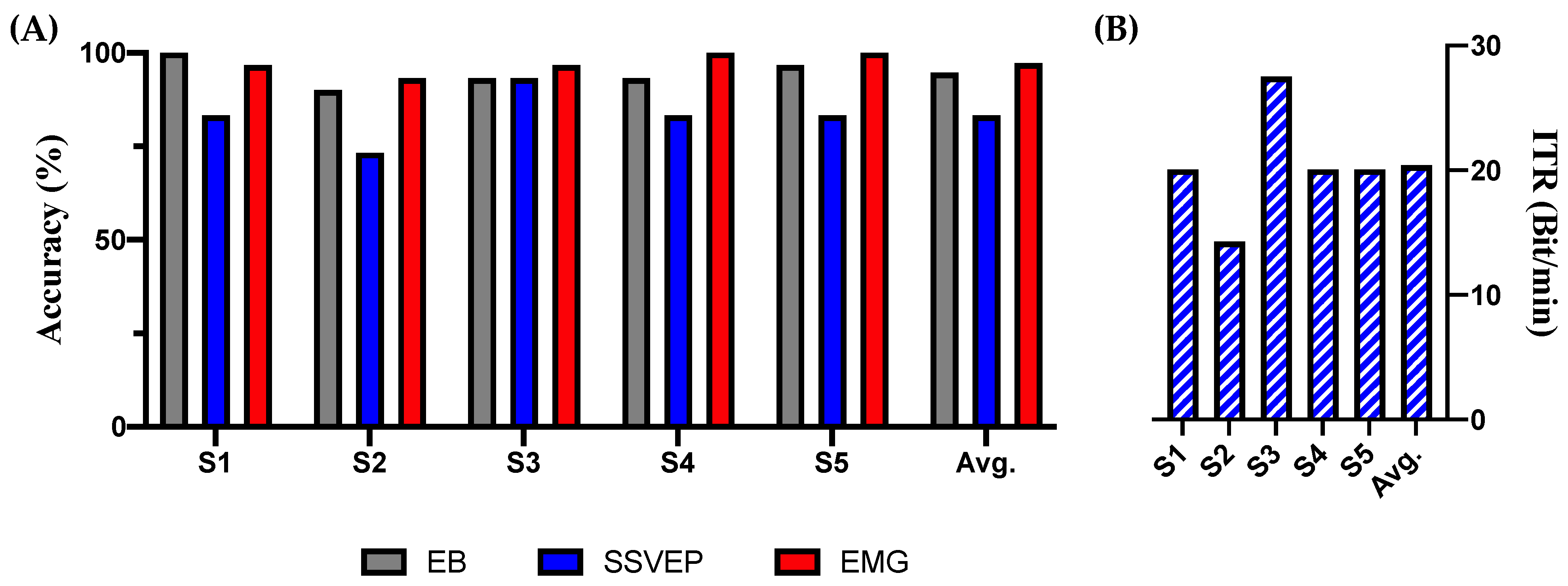
3.1. Experimental Result
3.2. Simulation of the Proposed System
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- World Health Organization. Available online: https://www.who.int/health-topics/disability#tab=tab_1 (accessed on 19 May 2021).
- World Health Organization. Available online: https://www.who.int/health-topics/ageing#tab=tab_1 (accessed on 19 May 2021).
- Riek, L.D. Healthcare robotics. Commun. ACM 2017, 60, 68–78. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, X.; Fu, R.; Sun, G. Study of the home-auxiliary robot based on BCI. Sensors 2018, 18, 1779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.; Kim, K.T.; Jeong, J.H.; Kim, L.; Lee, S.J.; Kim, H. Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton. Sensors 2020, 20, 7309. [Google Scholar] [CrossRef] [PubMed]
- Perera, C.J.; Naotunna, I.; Sadaruwan, C.; Gopura, R.A.R.C.; Lalitharatne, T.D. SSVEP based BMI for a meal assistance robot. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 2295–2300. [Google Scholar]
- Bhattacharjee, T.; Gordon, E.K.; Scalise, R.; Cabrera, M.E.; Caspi, A.; Cakmak, M.; Srinivasa, S.S. Is more autonomy always better? Exploring preferences of users with mobility impairments in robot-assisted feeding. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 181–190. [Google Scholar]
- Mahmud, S.; Lin, X.; Kim, J.-H. Interface for Human Machine Interaction for assistant devices: A review. In Proceedings of the 2020 10th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 6–8 January 2020; pp. 0768–0773. [Google Scholar]
- Dianatfar, M.; Latokartano, J.; Lanz, M. Review on existing VR/AR solutions in human–robot collaboration. Procedia CIRP 2021, 97, 407–411. [Google Scholar] [CrossRef]
- Chamola, V.; Vineet, A.; Nayyar, A.; Hossain, E. Brain-Computer Interface-Based Humanoid Control: A Review. Sensors 2020, 20, 3620. [Google Scholar] [CrossRef] [PubMed]
- Zero, E.; Bersani, C.; Sacile, R. Identification of Brain Electrical Activity Related to Head Yaw Rotations. Sensors 2021, 21, 3345. [Google Scholar] [CrossRef]
- Gao, Q.; Dou, L.; Belkacem, A.N.; Chen, C. Noninvasive electroencephalogram based control of a robotic arm for writing task using hybrid BCI system. BioMed Res. Int. 2017, 2017, 8316485. [Google Scholar] [CrossRef] [Green Version]
- Park, S.; Cha, H.-S.; Kwon, J.; Kim, H.; Im, C.-H. Development of an online home appliance control system using augmented reality and an ssvep-based brain-computer interface. In Proceedings of the 2020 8th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Korea, 26–28 February 2020; pp. 1–2. [Google Scholar]
- Chai, X.; Zhang, Z.; Guan, K.; Lu, Y.; Liu, G.; Zhang, T.; Niu, H. A hybrid BCI-controlled smart home system combining SSVEP and EMG for individuals with paralysis. Biomed. Signal Process. Control 2020, 56, 101687. [Google Scholar] [CrossRef]
- Lee, T.; Kim, M.; Kim, S.-P. Improvement of P300-Based Brain-Computer Interfaces for Home Appliances Control by Data Balancing Techniques. Sensors 2020, 20, 5576. [Google Scholar] [CrossRef]
- Park, S.; Han, C.-H.; Im, C.-H. Design of Wearable EEG Devices Specialized for Passive Brain-Computer Interface Applications. Sensors 2020, 20, 4572. [Google Scholar] [CrossRef]
- Antoniou, E.; Bozios, P.; Christou, V.; Tzimourta, K.D.; Kalafatakis, K.; Tsipouras, M.G.; Giannakeas, N.; Tzallas, A.T. EEG-Based Eye Movement Recognition Using the Brain-Computer Interface and Random Forests. Sensors 2021, 21, 2339. [Google Scholar] [CrossRef]
- Hasbulah, M.H.; Jafar, F.A.; Nordin, M.H. Fundamental of Electroencephalogram (EEG) Review for Brain-Computer Interface (BCI) System. Int. Res. J. Eng. Technol. 2019, 6, 1017–1028. [Google Scholar]
- Rashid, M.; Sulaiman, N.; Majeed, A.P.A.; Musa, R.M.; Nasir, A.F.A.; Bari, B.S.; Khatun, S. Current Status, Challenges, and Possible Solutions of EEG-Based Brain-Computer Interface: A Comprehensive Review. Front. Neurorobot. 2020, 14, 25. [Google Scholar] [CrossRef] [PubMed]
- Lin, Z.; Zhang, C.; Wu, W.; Gao, X. Frequency recognition based on canonical correlation analysis for SSVEP-based BCIs. IEEE Trans. Biomed. Eng. 2006, 53, 2610–2614. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, D.; Yao, D.; Xu, P. The extension of multivariate synchronization index method for SSVEP-based BCI. Neurocomputing 2017, 269, 226–231. [Google Scholar] [CrossRef]
- Laport, F.; Iglesia, D.; Dapena, A.; Castro, P.M.; Vazquez-Araujo, F.J. Proposals and Comparisons from One-Sensor EEG and EOG Human-Machine Interfaces. Sensors 2021, 21, 2220. [Google Scholar] [CrossRef] [PubMed]
- Kothe, C.; Medine, D.; Grivich, M. Lab Streaming Layer. 2014. Available online: https://github.com/sccn/labstreaminglayer (accessed on 19 May 2021).
- Borghini, G.; Aricò, P.; Di Flumeri, G.; Sciaraffa, N.; Babiloni, F. Correlation and similarity between cerebral and non-cerebral electrical activity for user’s states assessment. Sensors 2019, 19, 704. [Google Scholar] [CrossRef] [Green Version]
- Di Flumeri, G.; Aricò, P.; Borghini, G.; Colosimo, A.; Babiloni, F. A new regression-based method for the eye blinks artifacts correction in the EEG signal, without using any EOG channel. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 3187–3190. [Google Scholar]
- Rabiner, L.R.; Gold, B.; Yuen, C. Theory and Application of Digital Signal Processing; Prentice-Hall: Hoboken, NJ, USA, 2016. [Google Scholar]
- NT Robot. Available online: http://www.ntrobot.net/shop_contents/myboard_read.htm?load_type=&page_idx=0&tag_on=&h_search_c=0&h_search_v=&me_popup=&myboard_code=product&page_limit=12&idx=46206&page=1&category_idx= (accessed on 21 May 2021).
- Renard, Y.; Lotte, F.; Gibert, G.; Congedo, M.; Maby, E.; Delannoy, V.; Bertrand, O.; Lécuyer, A. Openvibe: An open-source software platform to design, test, and use brain–computer interfaces in real and virtual environments. Presence Teleoperators Virtual Environ. 2010, 19, 35–53. [Google Scholar] [CrossRef] [Green Version]
- Han, C.-H.; Kim, E.; Im, C.-H. Development of a brain–computer interface toggle switch with low false-positive rate using respiration-modulated photoplethysmography. Sensors 2020, 20, 348. [Google Scholar] [CrossRef] [Green Version]
- Perera, C.J.; Lalitharatne, T.D.; Kiguchi, K. EEG-controlled meal assistance robot with camera-based automatic mouth position tracking and mouth open detection. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1760–1765. [Google Scholar]
- Pan, J.; Li, Y.; Zhang, R.; Gu, Z.; Li, F. Discrimination between control and idle states in asynchronous SSVEP-based brain switches: A pseudo-key-based approach. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 435–443. [Google Scholar] [CrossRef] [Green Version]
- Diez, P.F.; Mut, V.A.; Perona, E.M.A.; Leber, E.L. Asynchronous BCI control using high-frequency SSVEP. J. Neuroeng. Rehabil. 2011, 8, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Allison, B.; Luth, T.; Valbuena, D.; Teymourian, A.; Volosyak, I.; Graser, A. BCI demographics: How many (and what kinds of) people can use an SSVEP BCI? IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 107–116. [Google Scholar] [CrossRef]
- Shao, L.; Zhang, L.; Belkacem, A.N.; Zhang, Y.; Chen, X.; Li, J.; Liu, H. EEG-controlled wall-crawling cleaning robot using SSVEP-based brain-computer interface. J. Healthc. Eng. 2020, 2020, 6968713. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Li, Y.; Lu, J.; Li, P.A. Hybrid BCI Based on SSVEP and EOG for Robotic Arm Control. Front. Neurorobot. 2020, 14, 95. [Google Scholar] [CrossRef] [PubMed]
- Na, R.; Hu, C.; Sun, Y.; Wang, S.; Zhang, S.; Han, M.; Yin, W.; Zhang, J.; Chen, X.; Zheng, D. An embedded lightweight SSVEP-BCI electric wheelchair with hybrid stimulator. Digit. Signal Process. 2021, 116, 103101. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, X.; Li, K.; Wang, J.; Chen, X. Humanoid Robot Control System Based on AR-SSVEP. In Proceedings of the 2020 6th International Conference on Computing and Artificial Intelligence, Tianjin, China, 23–26 April 2020; pp. 529–533. [Google Scholar]
- Arpaia, P.; Duraccio, L.; Moccaldi, N.; Rossi, S. Wearable brain-computer interface instrumentation for robot-based rehabilitation by augmented reality. IEEE Trans. Instrum. Meas. 2020, 69, 6362–6371. [Google Scholar] [CrossRef]
- Manda, Y.; Kodama, N.; Maeda, N.; Minagi, S. Effect of food properties and chewing condition on the electromyographic activity of the posterior tongue. J. Oral Rehabil. 2019, 46, 511–517. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | SSVEP | S1 | S2 | S3 | S4 | S5 | Average |
|---|---|---|---|---|---|---|---|
| 1 channel 3 s | Accuracy (%) | 60.00 | 60.00 | 86.67 | 73.33 | 76.67 | 71.33 |
| ITR (Bit/min) | 11.02 | 11.02 | 29.78 | 19.04 | 21.43 | 18.46 | |
| 3 channels 3 s | Accuracy (%) | 60.00 | 73.33 | 76.67 | 70.00 | 73.33 | 70.67 |
| ITR (Bit/min) | 11.02 | 19.04 | 21.43 | 16.81 | 19.04 | 17.47 | |
| 1 channel 4 s | Accuracy (%) | 66.67 | 63.33 | 93.33 | 83.33 | 80.00 | 77.33 |
| ITR (Bit/min) | 11.06 | 9.61 | 27.53 | 20.08 | 18.00 | 17.26 | |
| 3 channels 4 s | Accuracy (%) | 83.33 | 73.33 | 93.33 | 83.33 | 83.33 | 83.33 |
| ITR (Bit/min) | 20.08 | 14.28 | 27.53 | 20.08 | 20.08 | 20.41 |
| FPR | S1 | S2 | S3 | S4 | S5 | Average |
|---|---|---|---|---|---|---|
| EB (times/min) | 0.19 | 0 | 0 | 0.19 | 0.19 | 0.11 |
| EMG (times/min) | 0.19 | 0 | 0 | 0.1 | 0.1 | 0.08 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, J.; Park, S.; Im, C.-H.; Kim, L. A Hybrid Brain–Computer Interface for Real-Life Meal-Assist Robot Control. Sensors 2021, 21, 4578. https://doi.org/10.3390/s21134578
Ha J, Park S, Im C-H, Kim L. A Hybrid Brain–Computer Interface for Real-Life Meal-Assist Robot Control. Sensors. 2021; 21(13):4578. https://doi.org/10.3390/s21134578
Chicago/Turabian StyleHa, Jihyeon, Sangin Park, Chang-Hwan Im, and Laehyun Kim. 2021. "A Hybrid Brain–Computer Interface for Real-Life Meal-Assist Robot Control" Sensors 21, no. 13: 4578. https://doi.org/10.3390/s21134578
APA StyleHa, J., Park, S., Im, C.-H., & Kim, L. (2021). A Hybrid Brain–Computer Interface for Real-Life Meal-Assist Robot Control. Sensors, 21(13), 4578. https://doi.org/10.3390/s21134578