
Inductive Tracking Methodology for Wireless Sensors in Photoreactors


Abstract
1. Introduction
1.1. Context and Motivation
1.2. State-of-the-Art Setups and the Expected Benefits of Using Wireless Sensors
1.3. Structure of This Paper
2. Data Transmission in an Underwater Environment
- Optical data transmission;
- Acoustic data transmission;
- Electromagnetic data transmission.
2.1. Acoustic and Optical Data Transmission in Underwater Environments
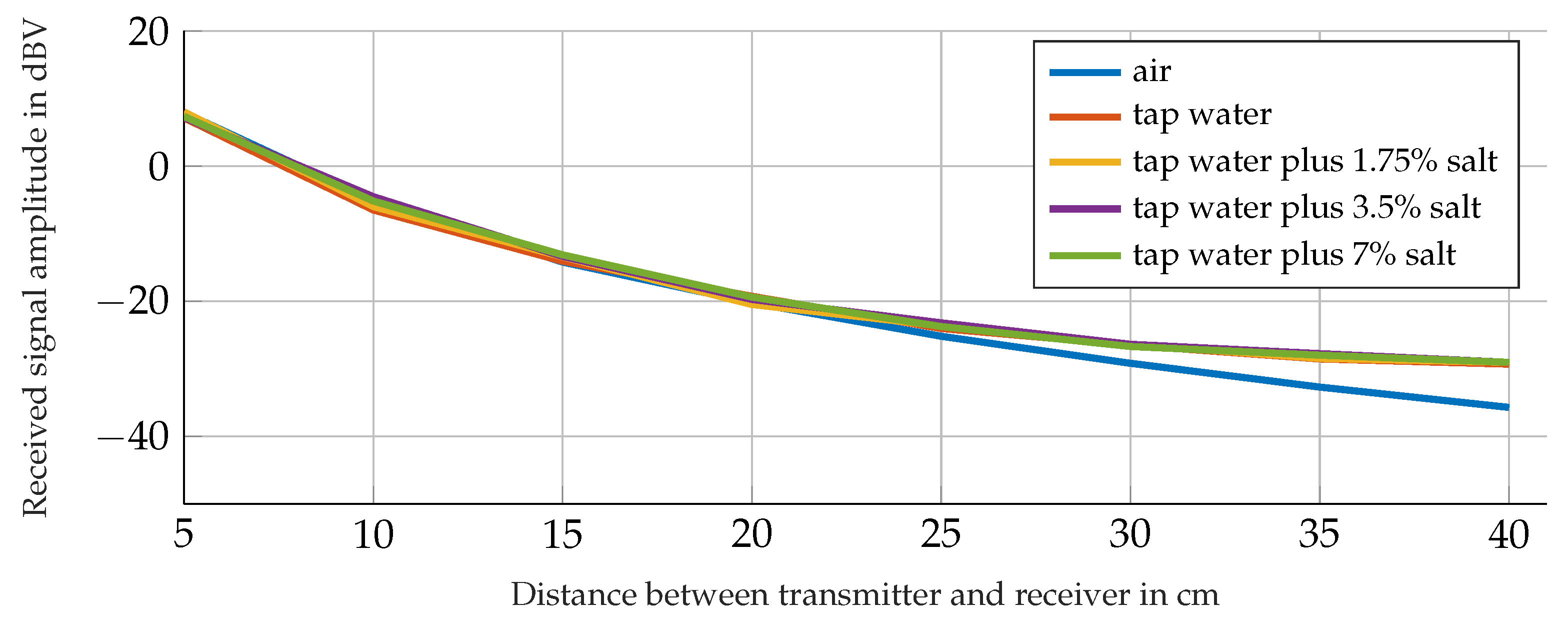
2.2. Physical Properties of the Radio Frequency Electromagnetic Communication in Underwater Environments
- good dielectric:
- good conductor:
2.3. Magnetic Induction (MI) Data Transmission
3. Localization Method
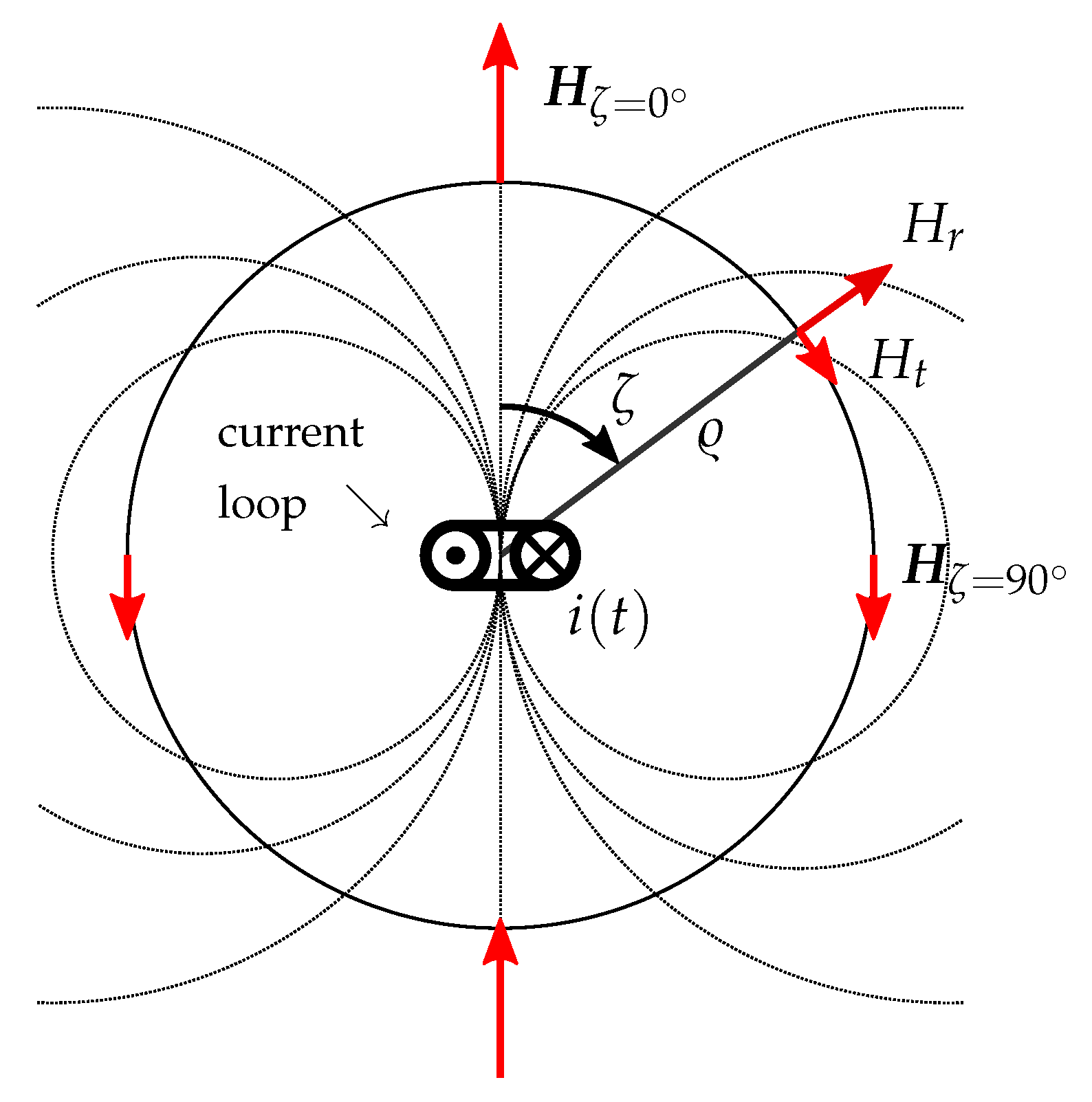
3.1. Analytical Description of the Magnetic Field of the Transmitting Coil
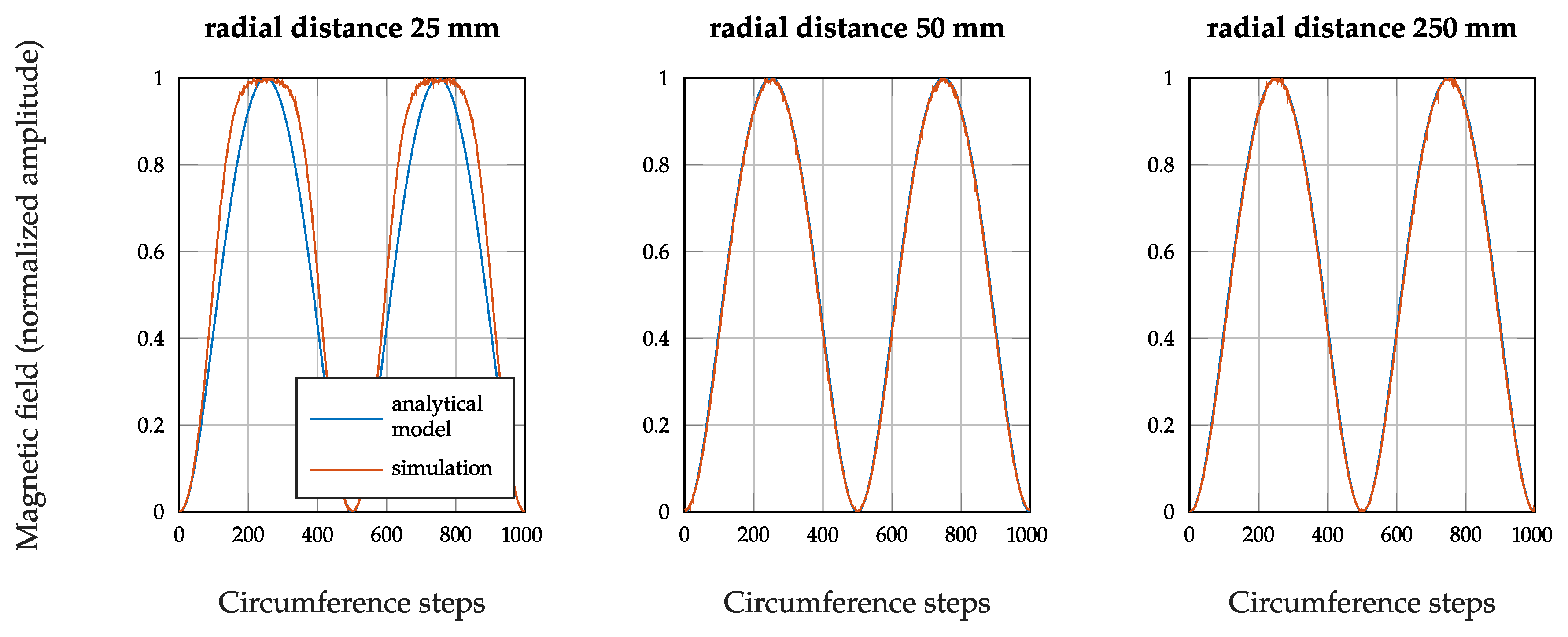
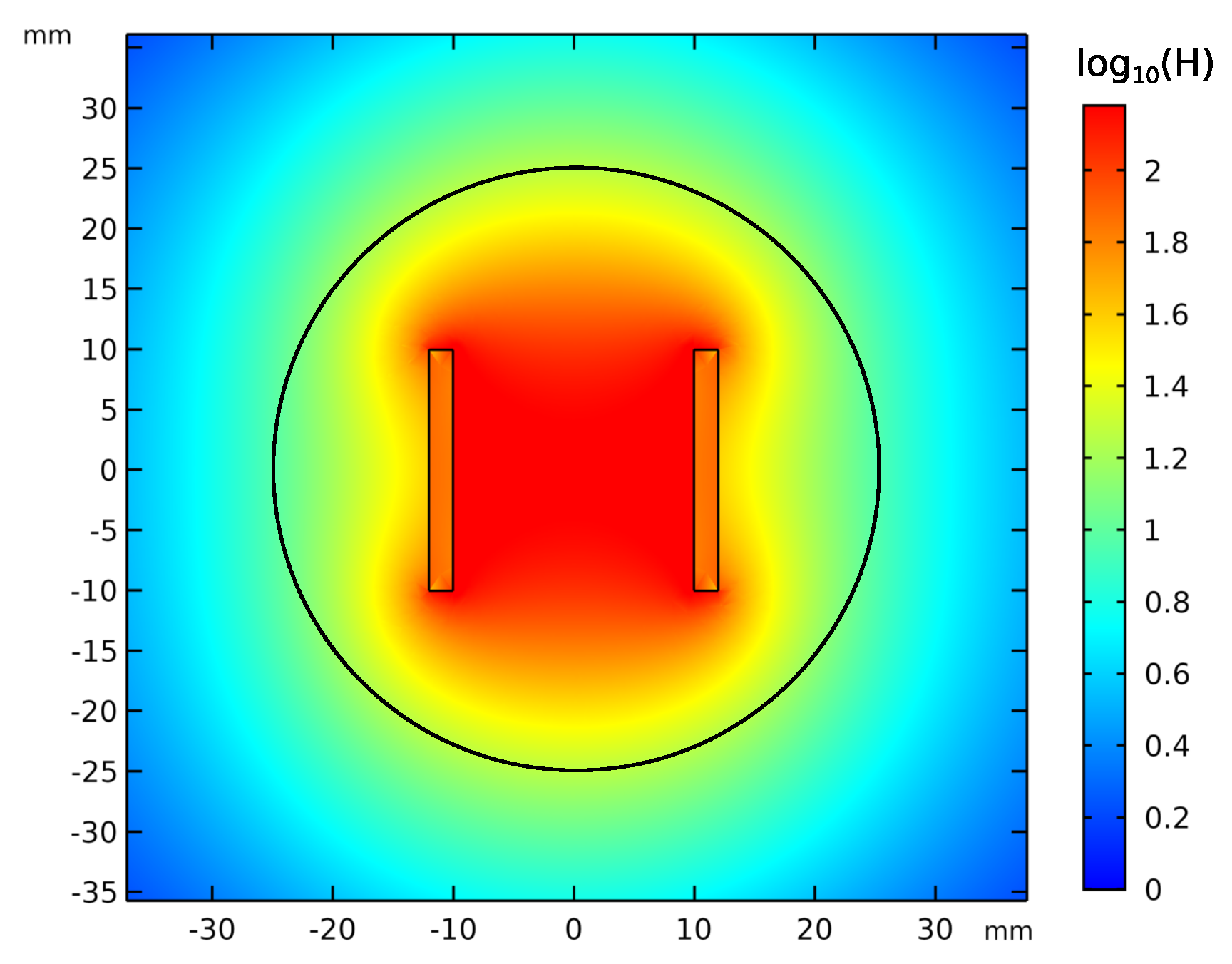
3.2. Simulation of the Magnetic Field and the Comparison between the Simulation Results and the Analytical Calculation
3.3. Coupling Equation between the Transmitter Coil and a Receiver Which Is Able to Measure the Magnetic Field in All Three x-, y-, and z-Directions
4. Measurement Hardware
4.1. Design of the Transmitter
4.2. Receiver Architecture
4.2.1. Main Receiver Design
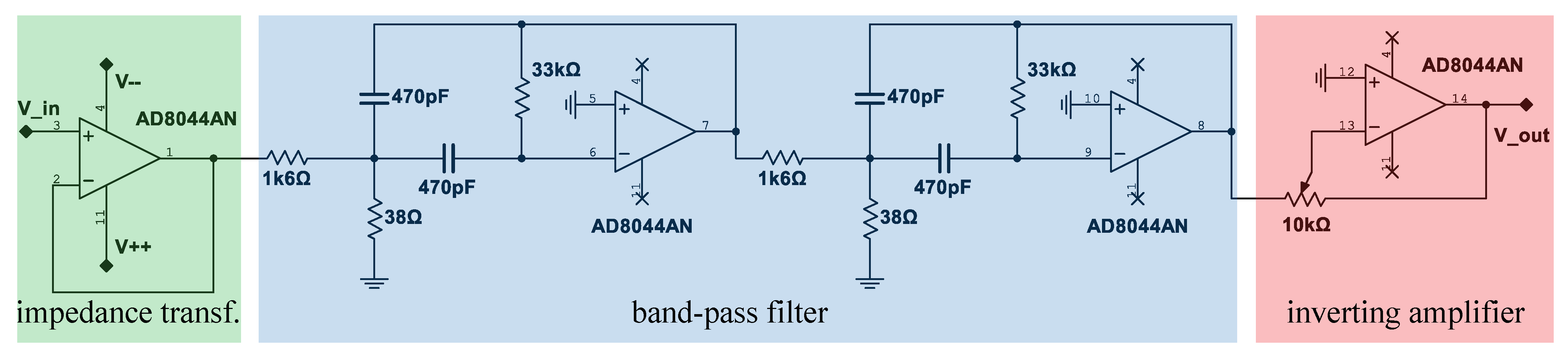
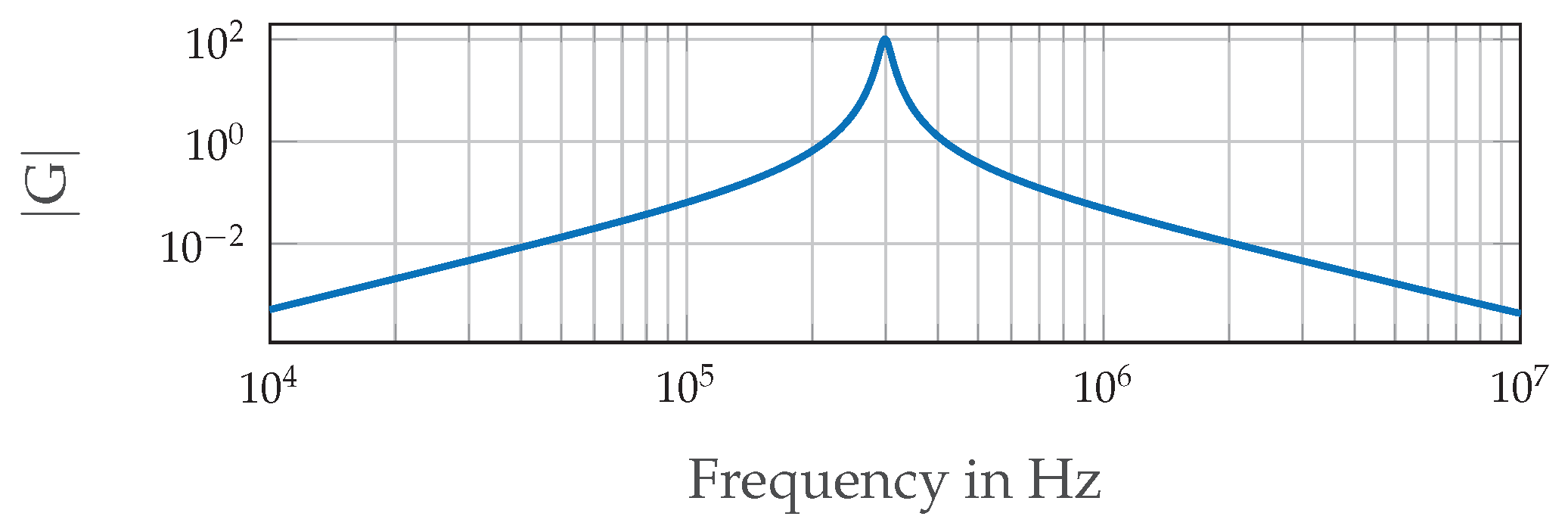
4.2.2. Receiver Electronics
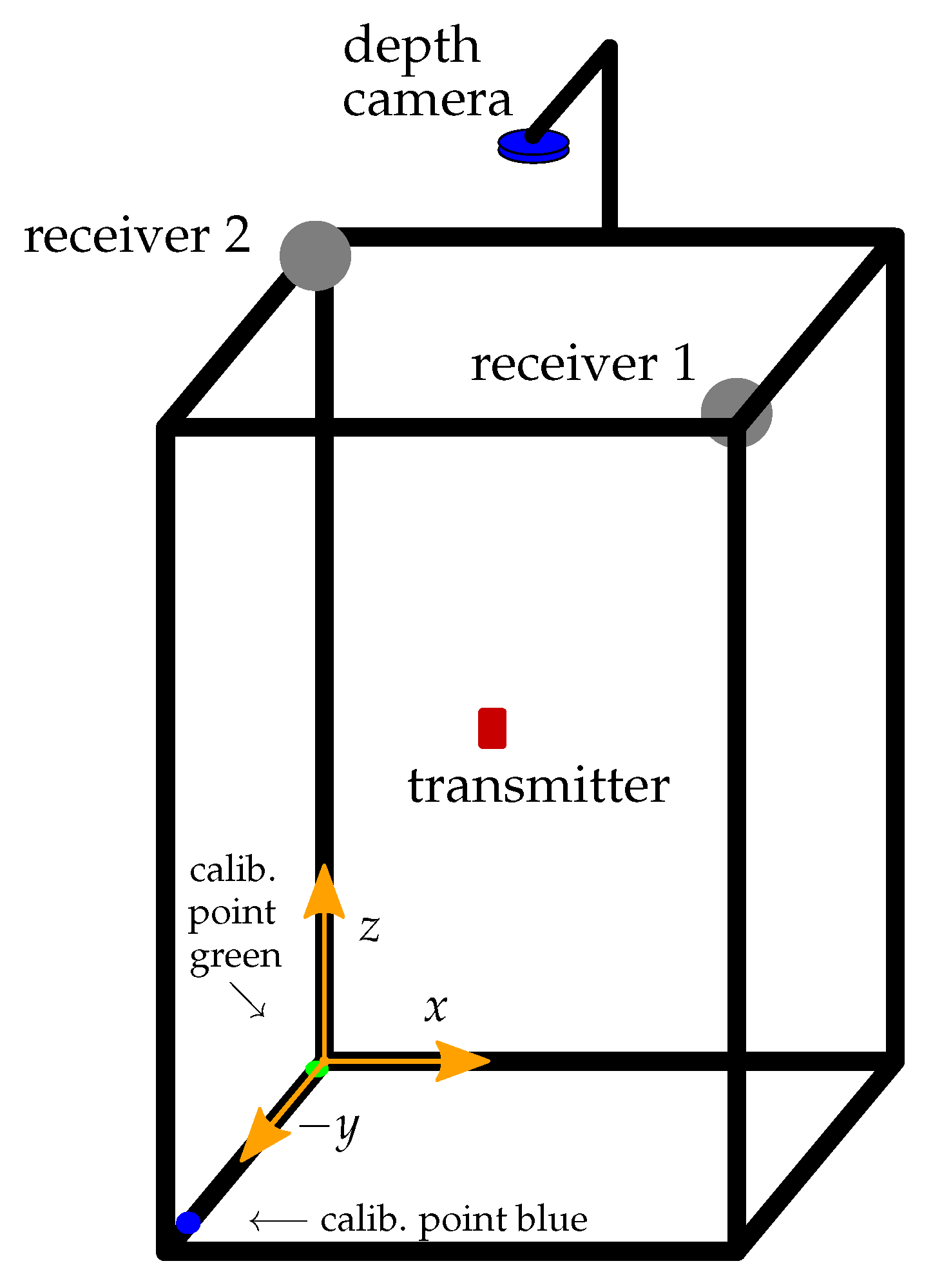
4.3. Measurements Setup
5. Calibration of the Receivers by Means of a LIDAR Depth Camera
5.1. Calibration Methodology
5.2. Automatic Calibration of the Camera
5.3. Improvement of the Inductively Measured Positions by Means of the Calibration Map
6. Results
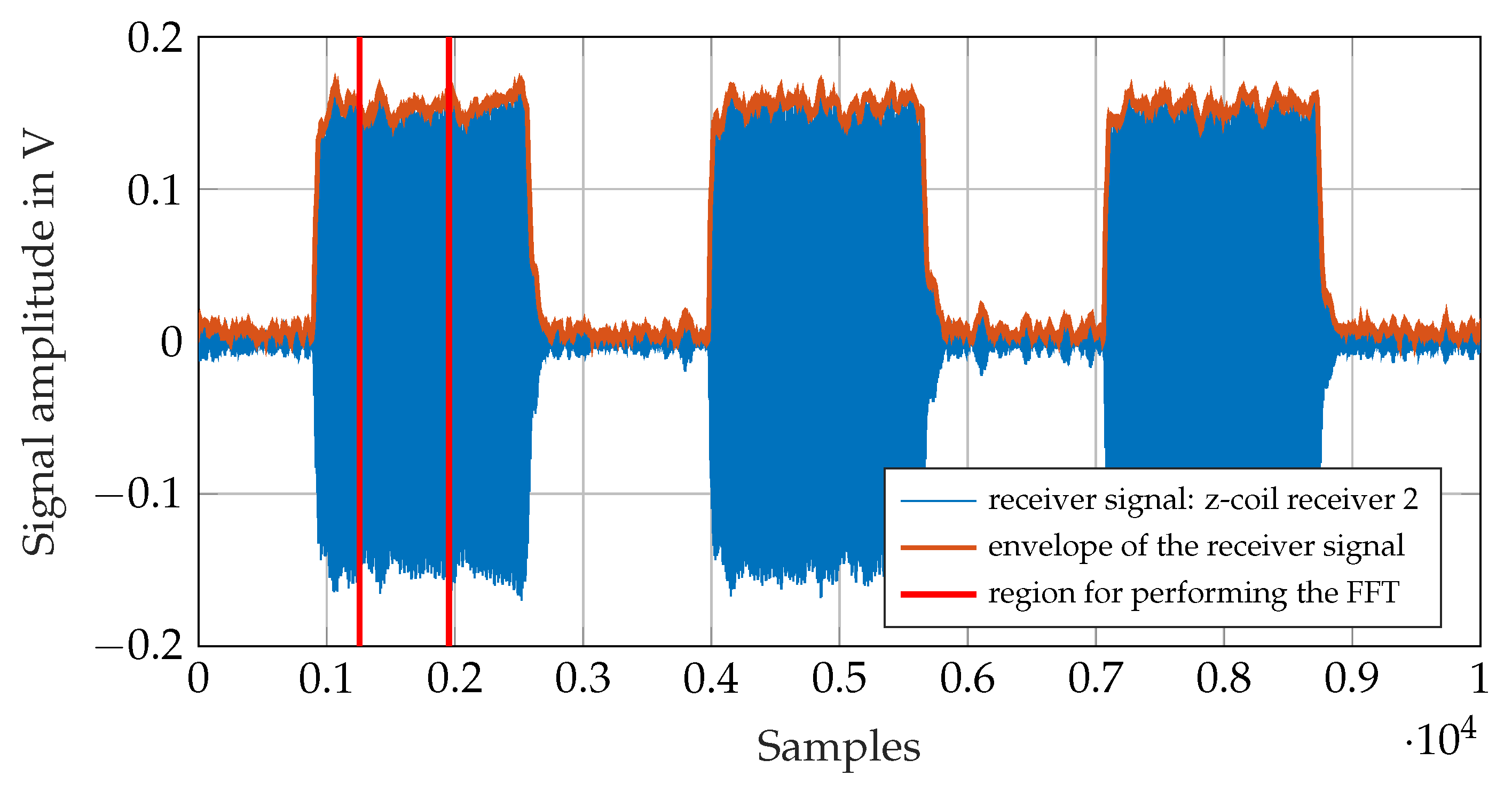
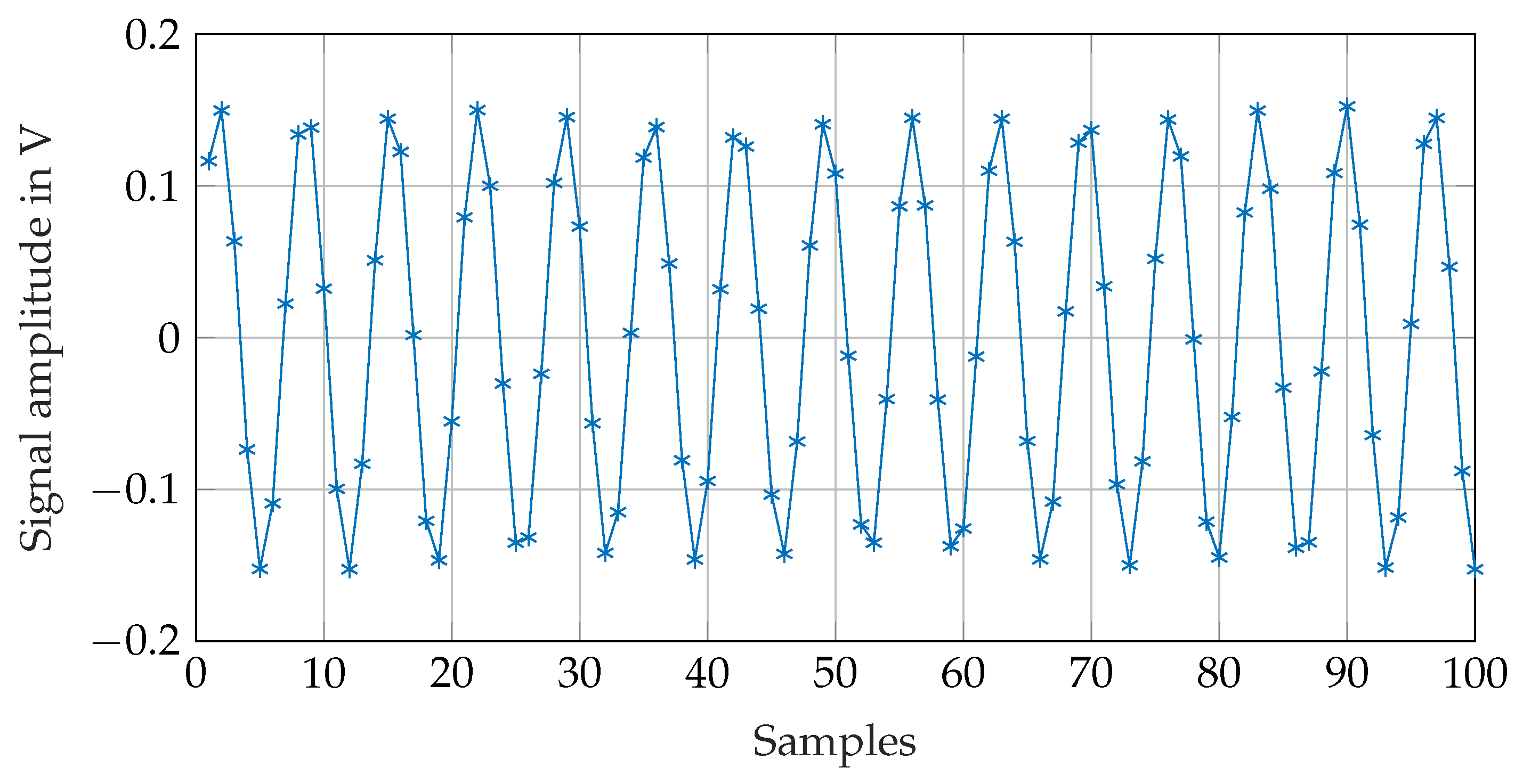
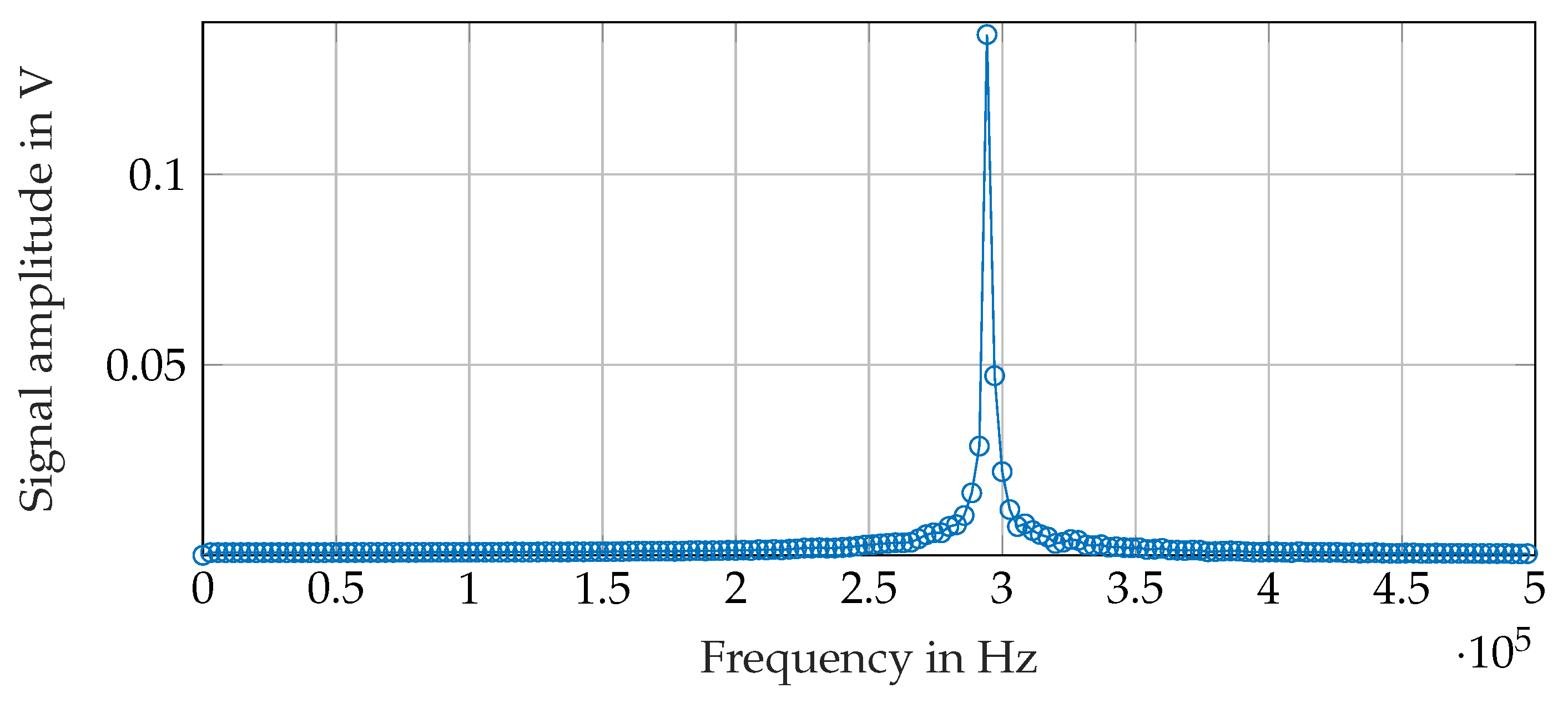
6.1. Receiver Signals
6.2. Calibration Map
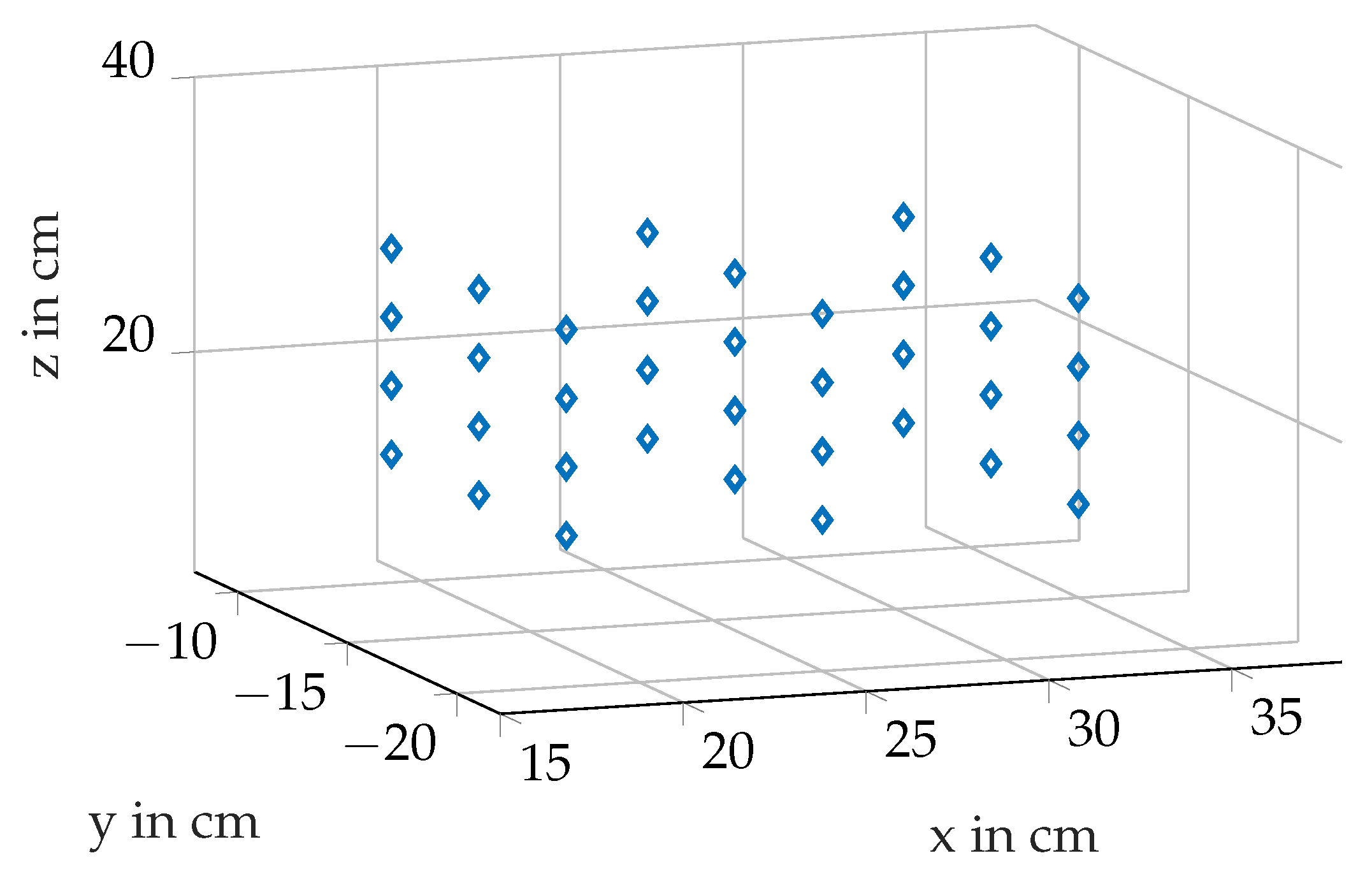
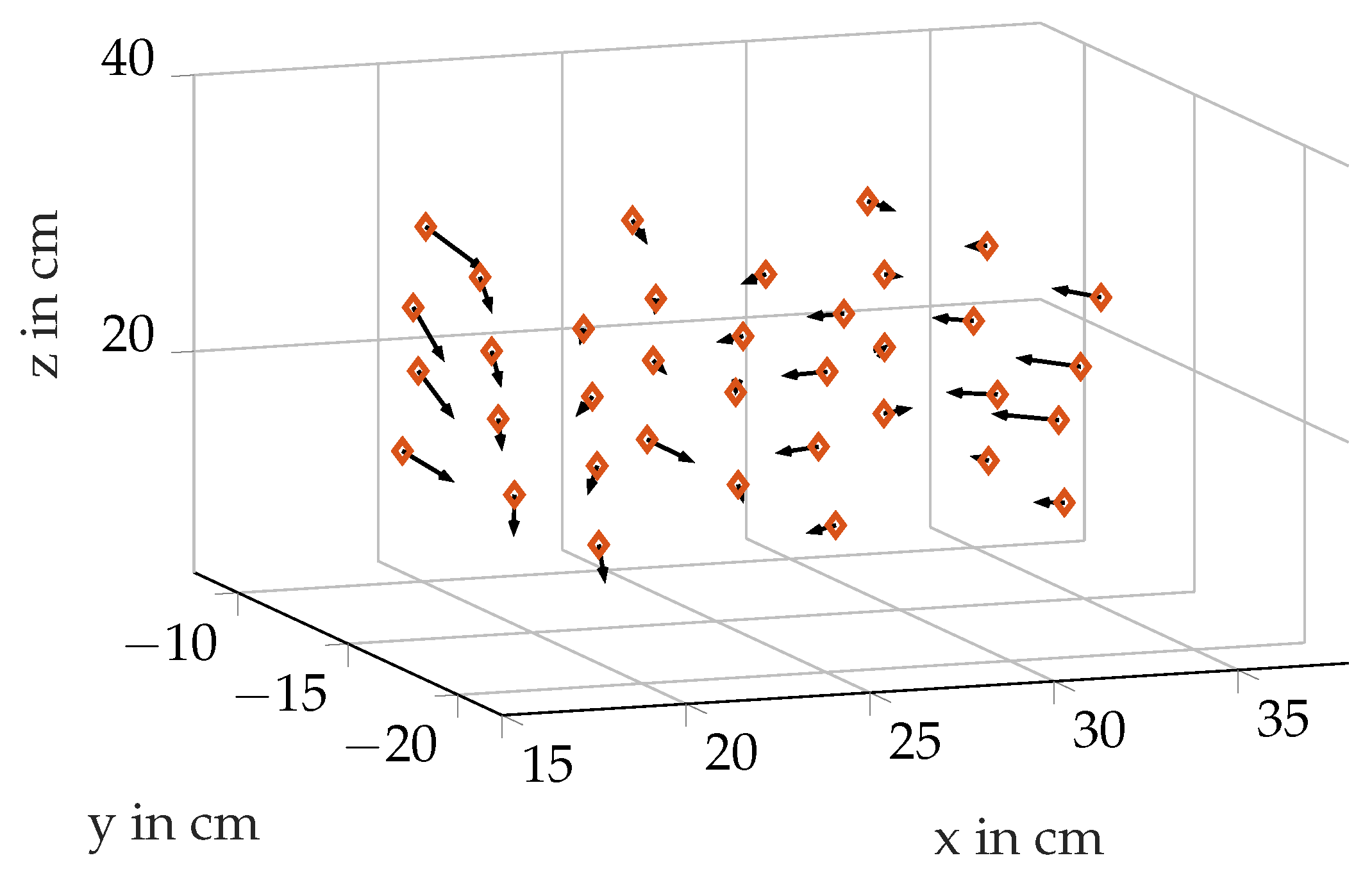
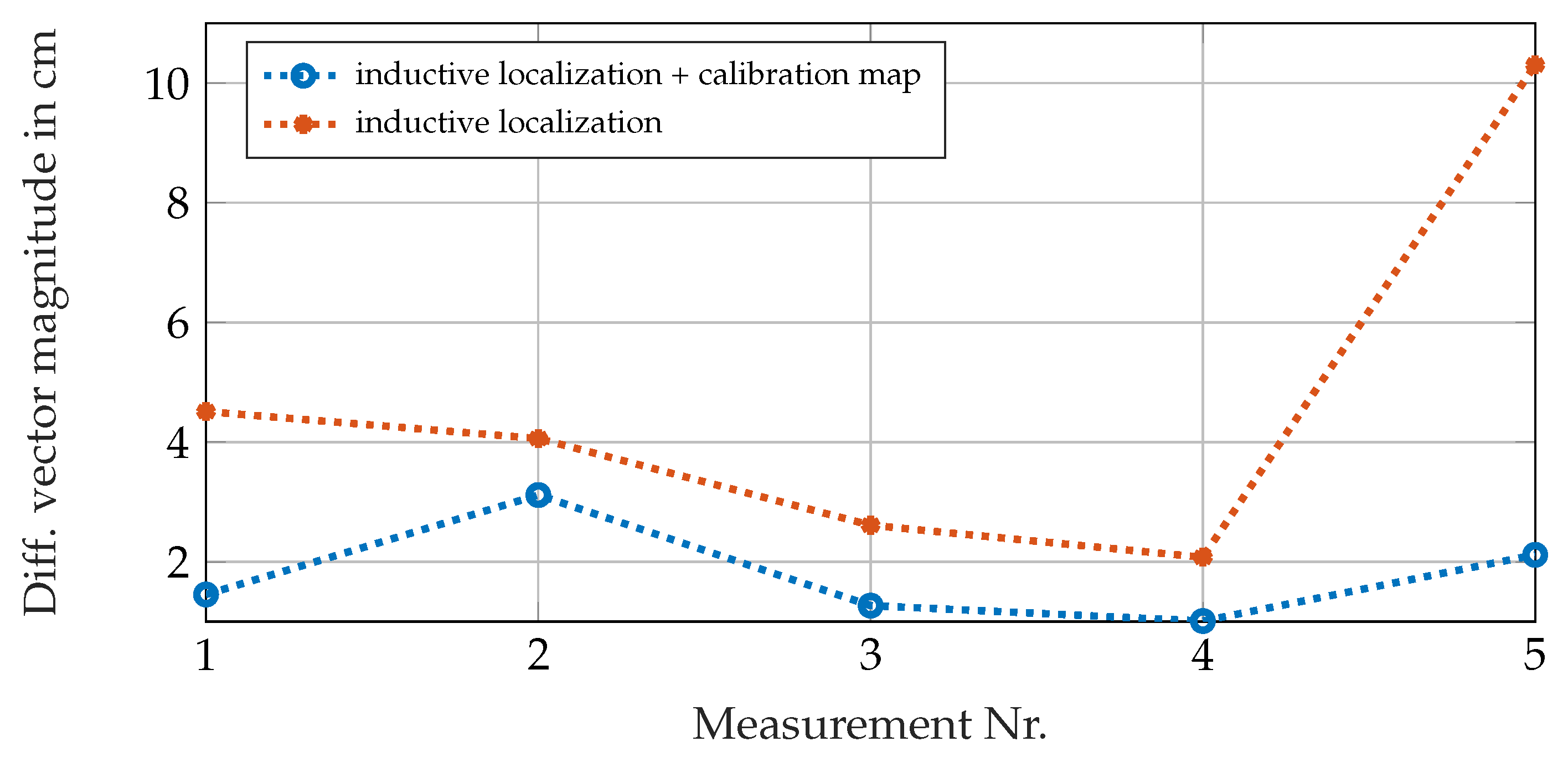
6.3. Localization Results
7. Discussion
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| NRMSE | Normalized Root-Mean-Square Error |
| FFT | Fast Fourier Transformation |
| LIDAR | Light Detection and Ranging |
| MI | Magnetic Induction |
| WLE | Wireless Light Emitter |
References
- Heining, M.; Sutor, A.; Stute, S.; Lindenberger, C.; Buchholz, R. Internal illumination of photobioreactors via wireless light emitters: A proof of concept. J. Appl. Phycol. 2015, 27, 59–66. [Google Scholar] [CrossRef]
- Pulz, O. Photobioreactors: Production systems for phototrophic microorganisms. Appl. Microbiol. Biotechnol. 2001, 57, 287–293. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Weathers, P.J.; Xiong, X.R.; Liu, C.Z. Microalgal bioreactors: Challenges and opportunities. Eng. Life Sci. 2009, 9, 178–189. [Google Scholar] [CrossRef]
- Sutor, A.; Heining, M.; Lindenberger, C.; Buchholz, R. A Method for Optimizing the Field Coils of Internally Illuminated Photobioreactors. In Proceedings of the INTERMAG2014, Dresden, Germany, 4–8 May 2014; pp. 2202–2204. [Google Scholar]
- Sutor, A.; Heining, M.; Buchholz, R. A Class-E Amplifier for a Loosely Coupled Inductive Power Transfer System with Multiple Receivers. Energies 2019, 12, 1165. [Google Scholar] [CrossRef]
- Burek, B.O.; Sutor, A.; Bahnemann, D.W.; Bloh, J.Z. Completely integrated wirelessly-powered photocatalyst-coated spheres as a novel means to perform heterogeneous photocatalytic reactions. Catal. Sci. Technol. 2017, 7, 4977–4983. [Google Scholar] [CrossRef]
- Duong, H.T.; Wu, Y.; Sutor, A.; Burek, B.O.; Hollmann, F.; Bloh, J.Z. Intensification of Photobiocatalytic Decarboxylation of Fatty Acids for the Production of Biodiesel. ACS Energy Lett. 2021. [Google Scholar] [CrossRef]
- Posten, C. Design principles of photo-bioreactors for cultivation of microalgae. Eng. Life Sci. 2009, 9, 165–177. [Google Scholar] [CrossRef]
- Li, J.; Xu, N.S.; Su, W.W. Online estimation of stirred-tank microalgal photobioreactor cultures based on dissolved oxygen measurement. Biochem. Eng. J. 2003, 14, 51–65. [Google Scholar] [CrossRef]
- Kanoun, O.; Bradai, S.; Khriji, S.; Bouattour, G.; El Houssaini, D.; Ben Ammar, M.; Naifar, S.; Bouhamed, A.; Derbel, F.; Viehweger, C. Energy-Aware System Design for Autonomous Wireless Sensor Nodes: A Comprehensive Review. Sensors 2021, 21, 548. [Google Scholar] [CrossRef] [PubMed]
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Qureshi, U.M.; Shaikh, F.K.; Aziz, Z.; Shah, S.M.Z.S.; Sheikh, A.A.; Felemban, E.; Qaisar, S.B. RF Path and Absorption Loss Estimation for Underwater Wireless Sensor Networks in Different Water Environments. Sensors 2016, 16, 890. [Google Scholar] [CrossRef] [PubMed]
- Balanis, C. Advanced Engineering Electromagnetics; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Lloret, J.; Sendra, S.; Ardid, M.; Rodrigues, J.J.P.C. Underwater Wireless Sensor Communications in the 2.4 GHz ISM Frequency Band. Sensors 2012, 12, 4237–4264. [Google Scholar] [CrossRef] [PubMed]
- Raab, F.H.; Blood, E.B.; Steiner, T.O.; Jones, H.R. Magnetic Position and Orientation Tracking System. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 709–718. [Google Scholar] [CrossRef]
- Ali, H.; Ahmad, T.J.; Khan, S.A. Inductive link design for medical implants. In Proceedings of the 2009 IEEE Symposium on Industrial Electronics Applications, Kuala Lumpur, Malaysia, 4–6 October 2009; Volume 2, pp. 694–699. [Google Scholar] [CrossRef]
- Edelmann, J.; Stojakovic, R.; Bauer, C.; Ussmueller, T. An inductive through-the-head OOK communication platform for assistive listening devices. In Proceedings of the 2018 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Anaheim, CA, USA, 14–17 January 2018; pp. 30–33. [Google Scholar] [CrossRef]
- Demetz, D.; Zott, O.; Sutor, A. Wireless and Traceable Sensors for Internally Illuminated Photoreactors. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; pp. 582–586. [Google Scholar] [CrossRef]
- Adamec, V.; Calderwood, J. On the determination of electrical conductivity in polyethylene. J. Phys. D Appl. Phys. 1981, 14, 1487. [Google Scholar] [CrossRef]
- Fiske, T.; Gokturk, H.; Kalyon, D. Enhancement of the Relative Magnetic Permeability of Polymer Composites with Hybrid Particulate Fillers. J. Appl. Polym. Sci. 1997, 65, 1371–1377. [Google Scholar] [CrossRef]
- Demetz, D.; Sutor, A. Magnetic Localization of Wireless Sensors for Internally Illuminated Photoreactors. In Proceedings of the 2020 IEEE SENSORS, Rotterdam, The Netherlands, 25–28 October 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Tietze, U.; Schenk, C.; Gamm, E. Electronic Circuits: Handbook for Design and Application; Electronic Circuits; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Demetz, D.; Sutor, A. Inductive Communication and Localization Method for Wireless Sensors in Photobioreactors. In Proceedings of the Fourteenth International Conference on Sensor Technologies and Applications (SENSORCOMM 2020), Valencia, Spain, 21–25 November 2020; pp. 19–22. [Google Scholar]
- Paperno, E.; Keisar, P. Three-dimensional magnetic tracking of biaxial sensors. IEEE Trans. Magn. 2004, 40, 1530–1536. [Google Scholar] [CrossRef]
- Lauterbach, T.; Lenk, F.; Walther, T.; Gernandt, T.; Moll, R.; Seidel, F.; Brunner, D.; Lüke, T.; Hedayat, C.; Büker, M.; et al. Sens-o-Spheres—Mobile, miniaturisierte Sensorplattform für die ortsungebundene Prozessmessung in Reaktionsgefäßen. In Proceedings of the Dresdner Sensor-Symposium 2017, Dresden, Germany, 4–6 December 2017; pp. 89–93. [Google Scholar] [CrossRef]
- Abrudan, T.E.; Xiao, Z.; Markham, A.; Trigoni, N. Distortion Rejecting Magneto-Inductive Three-Dimensional Localization (MagLoc). IEEE J. Sel. Areas Commun. 2015, 33, 2404–2417. [Google Scholar] [CrossRef]
- Wei, B.; Trigoni, N.; Markham, A. iMag: Accurate and Rapidly Deployable Inertial Magneto-Inductive Localisation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 99–106. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radial Distance 25 mm | Radial Distance 50 mm | Radial Distance 250 mm | |
|---|---|---|---|
| NRMSE |
| Nr. | Coordinates | |||||
|---|---|---|---|---|---|---|
| X | ||||||
| 1 | Y | |||||
| Z | ||||||
| X | ||||||
| 2 | Y | |||||
| Z | ||||||
| X | ||||||
| 3 | Y | |||||
| Z | ||||||
| X | ||||||
| 4 | Y | |||||
| Z | ||||||
| X | ||||||
| 5 | Y | |||||
| Z |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demetz, D.; Sutor, A. Inductive Tracking Methodology for Wireless Sensors in Photoreactors. Sensors 2021, 21, 4201. https://doi.org/10.3390/s21124201
Demetz D, Sutor A. Inductive Tracking Methodology for Wireless Sensors in Photoreactors. Sensors. 2021; 21(12):4201. https://doi.org/10.3390/s21124201
Chicago/Turabian StyleDemetz, David, and Alexander Sutor. 2021. "Inductive Tracking Methodology for Wireless Sensors in Photoreactors" Sensors 21, no. 12: 4201. https://doi.org/10.3390/s21124201
APA StyleDemetz, D., & Sutor, A. (2021). Inductive Tracking Methodology for Wireless Sensors in Photoreactors. Sensors, 21(12), 4201. https://doi.org/10.3390/s21124201