
Photogrammetric Process to Monitor Stress Fields Inside Structural Systems

 ,
,  ,
, 
 ,
, 
Abstract
1. Introduction
1.1. Main Contributions
- To demonstrate the advantages of using photogrammetrical approaches to determine orthogonal displacements in objects;
- Application of the boundary element method (BEM) to evaluate stress distributions based on optimized displacement surfaces;
- To demonstrate the application of image displacement along with BEM techniques to estimate real-time stresses in solids and structures;
- Validation of the results by comparing strain measures in an aluminum bar obtained by using long-period grating (LPG) optical fiber sensors and the proposed strategy.
1.2. Organization
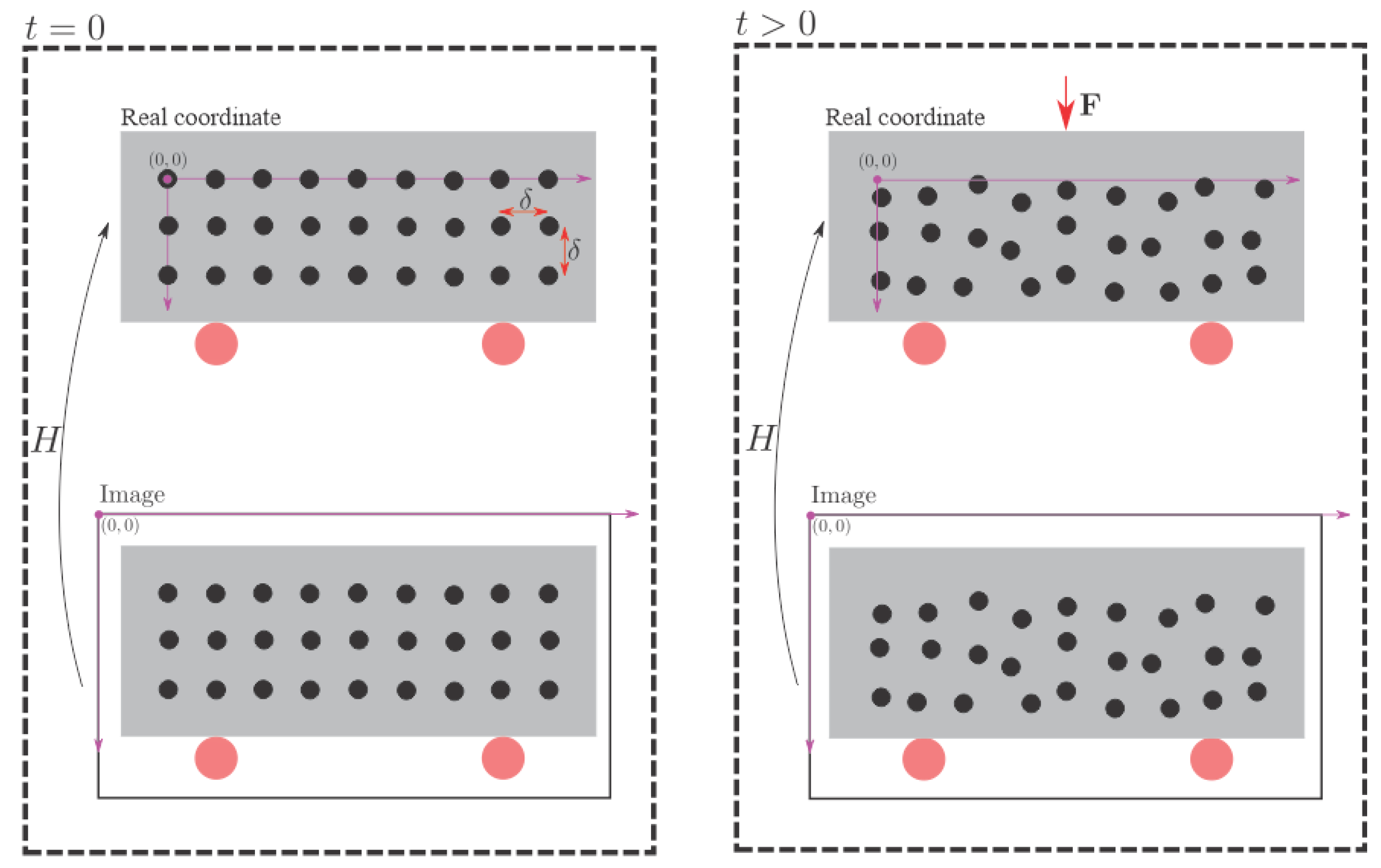
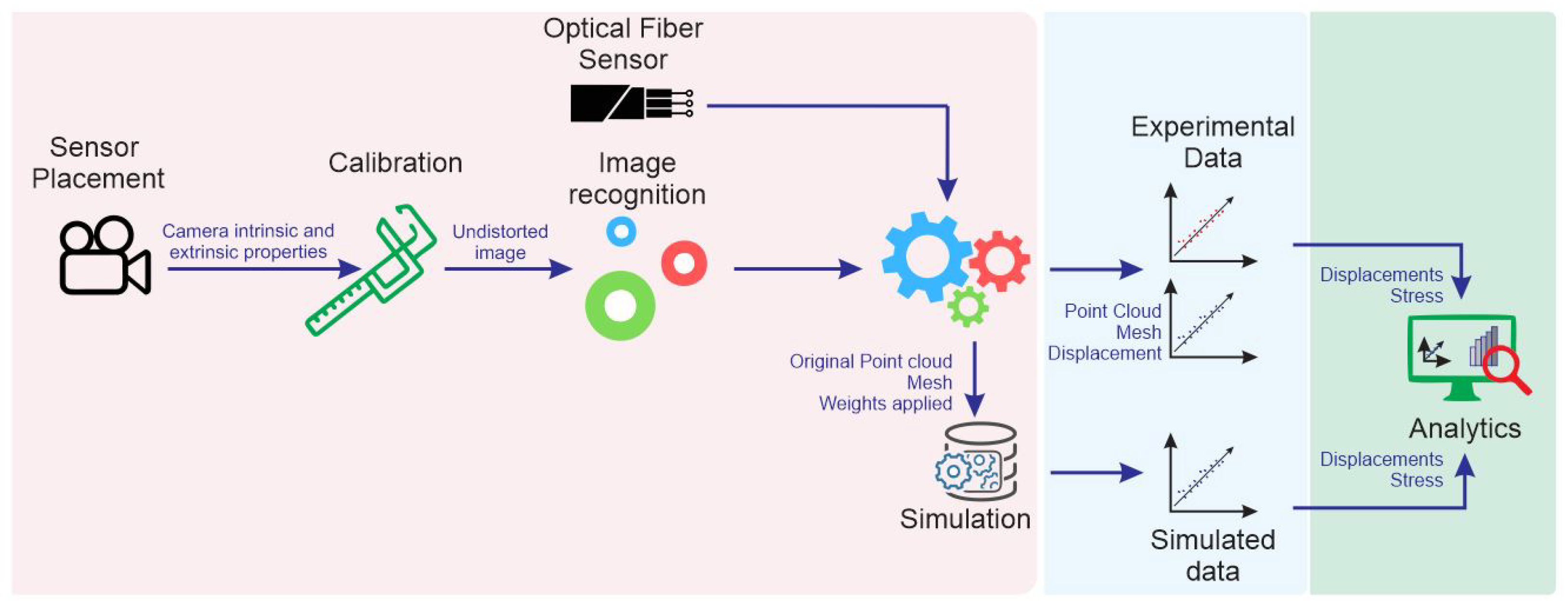
2. Image-Based Approach for Deformation Estimation
2.1. Spatial Filtering
2.2. Temporal Filter
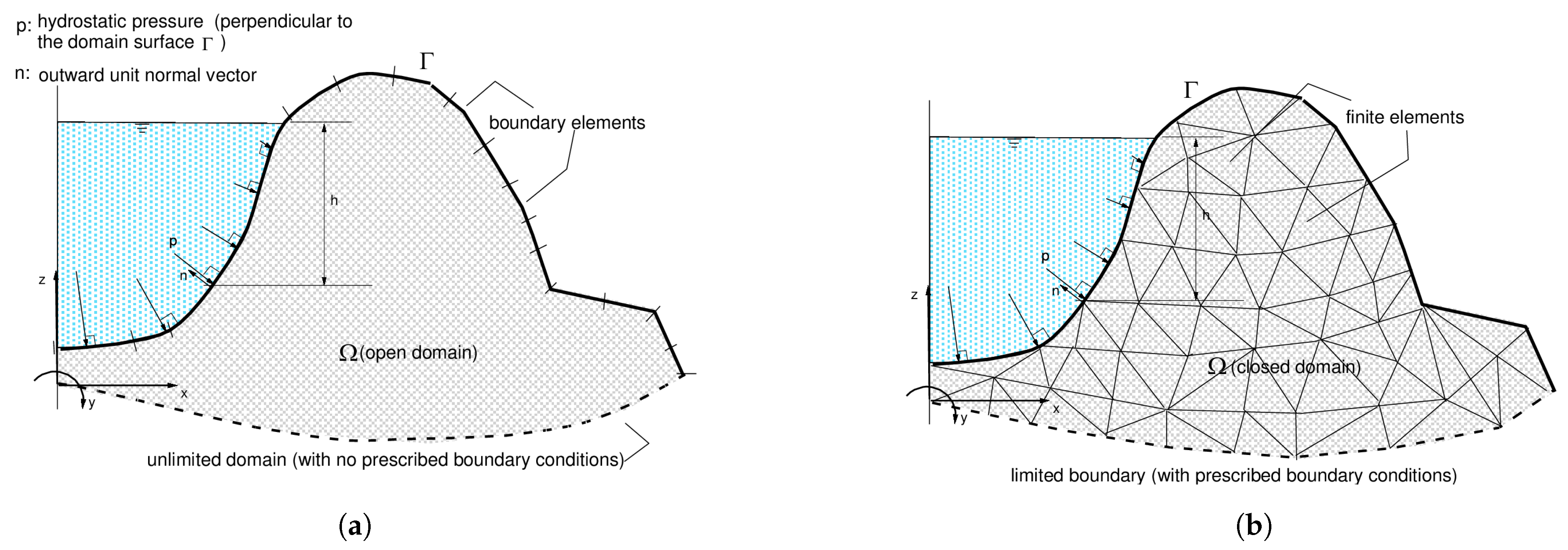
2.3. Boundary Element Method
3. Results and Discussion
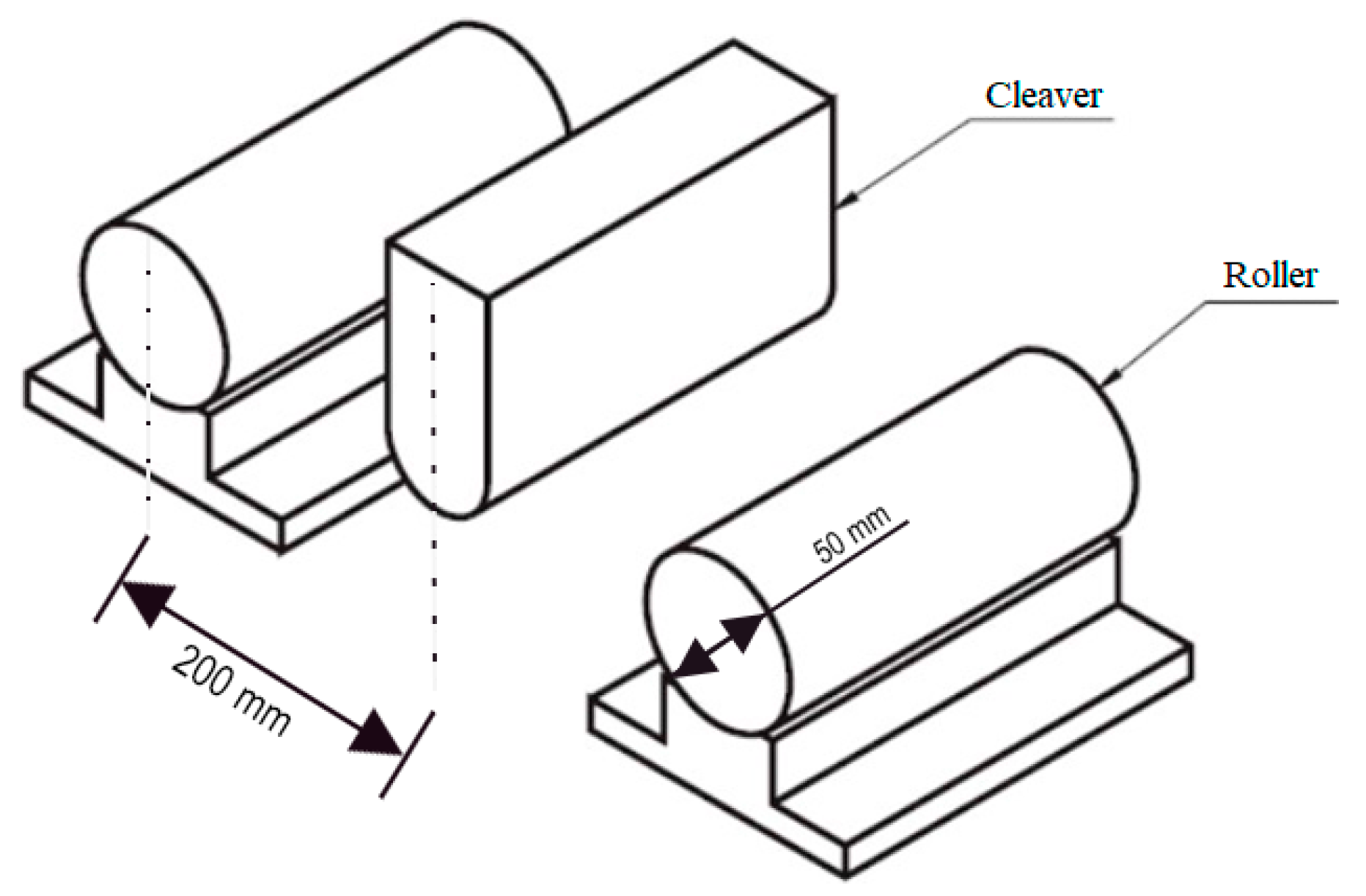
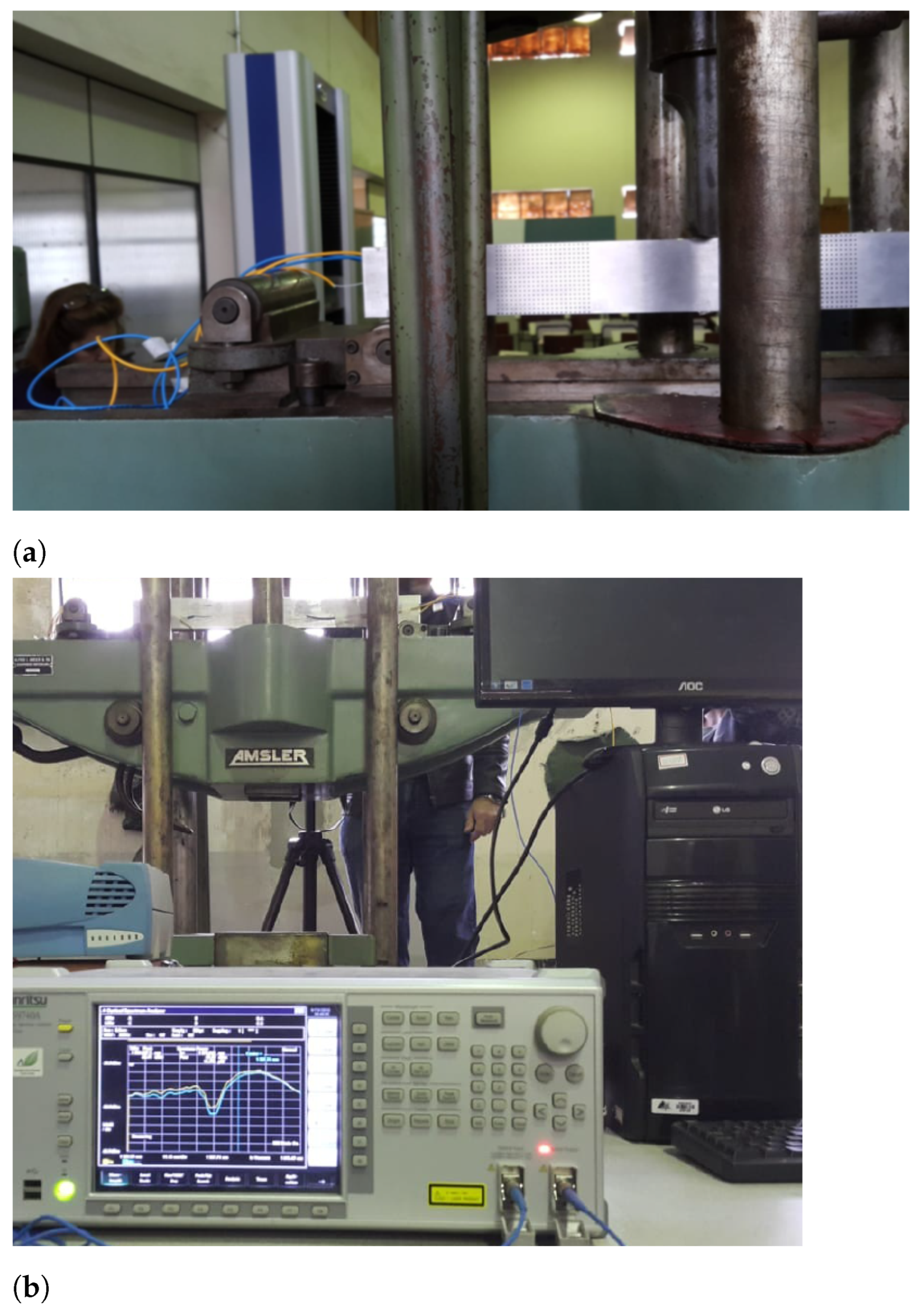
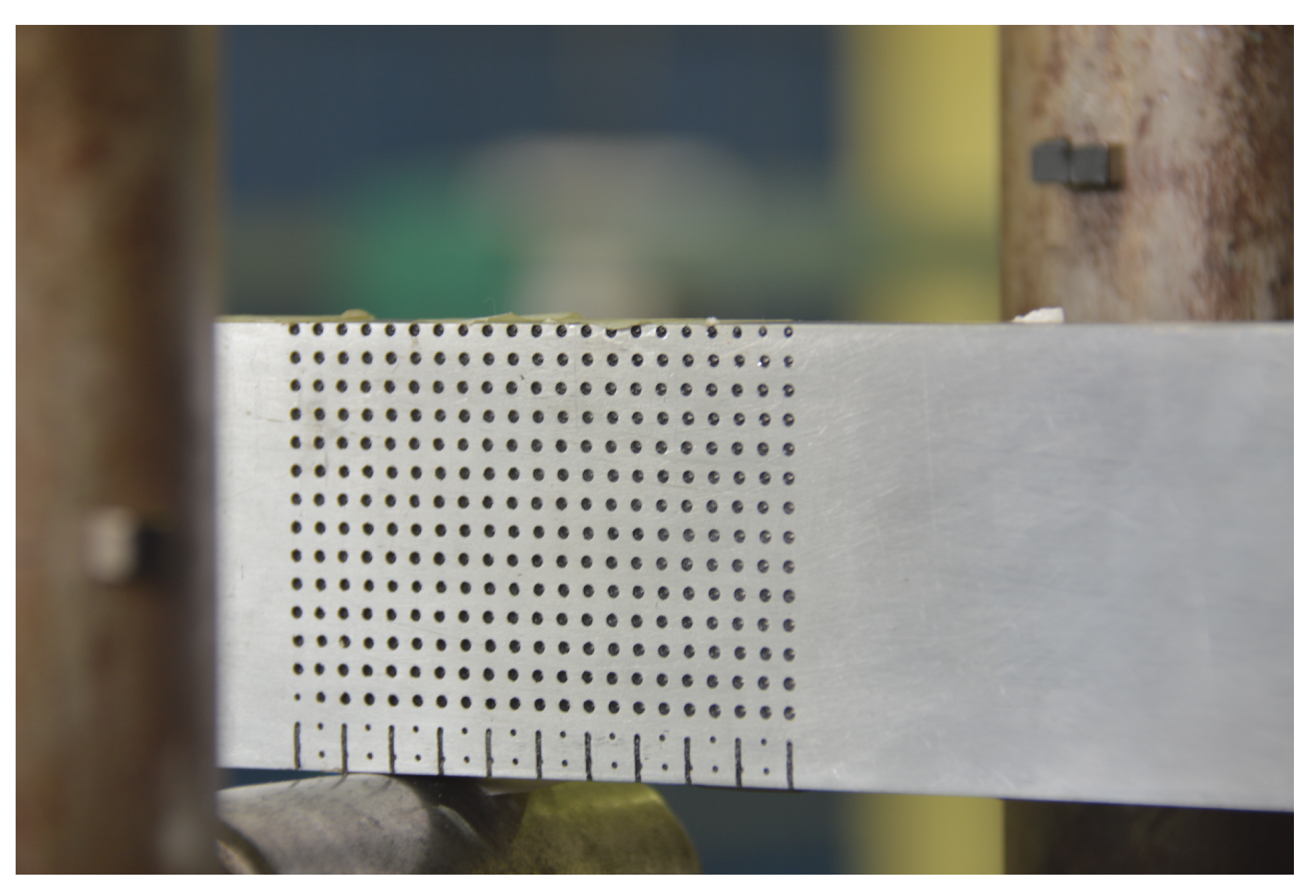
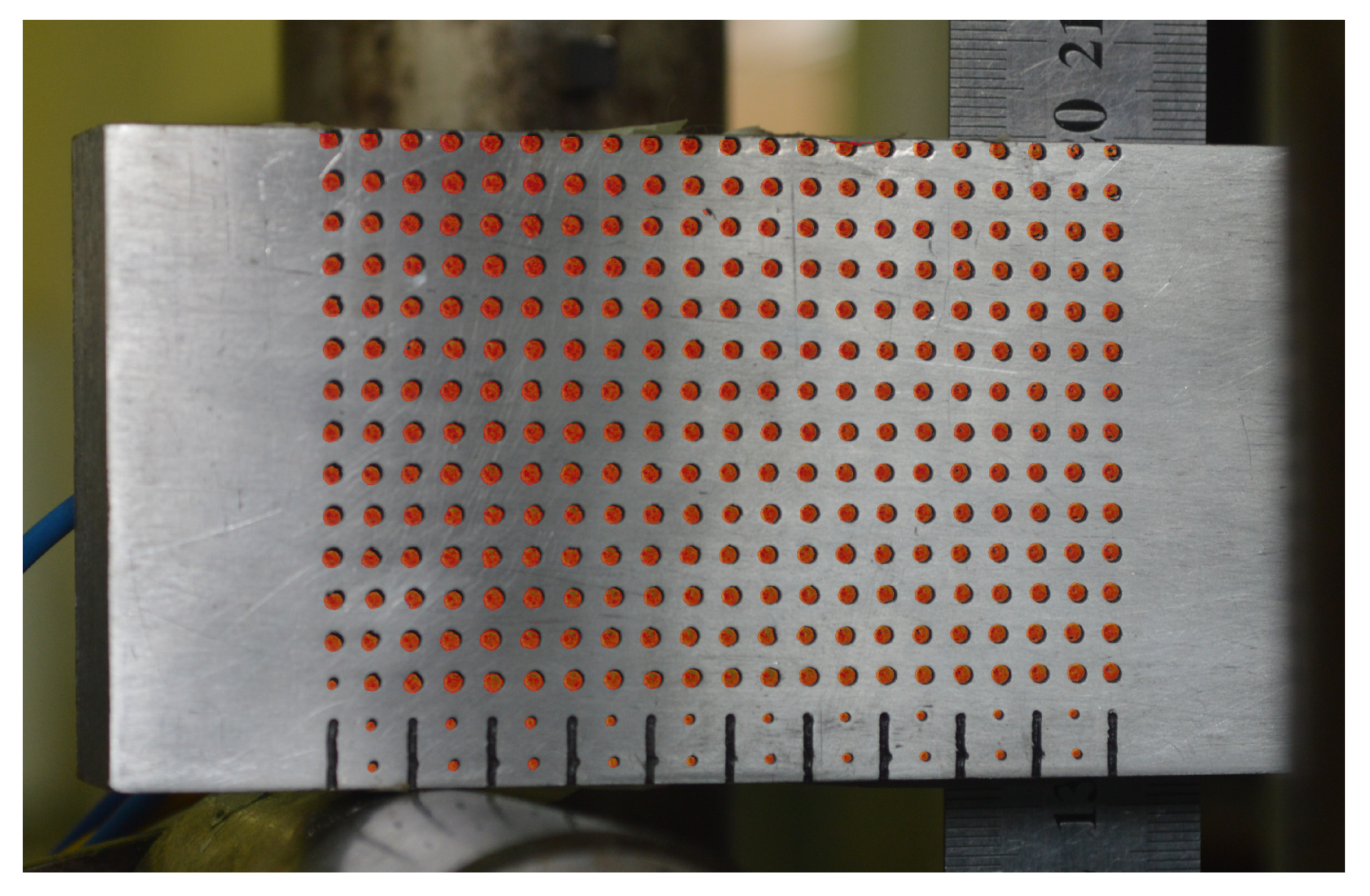
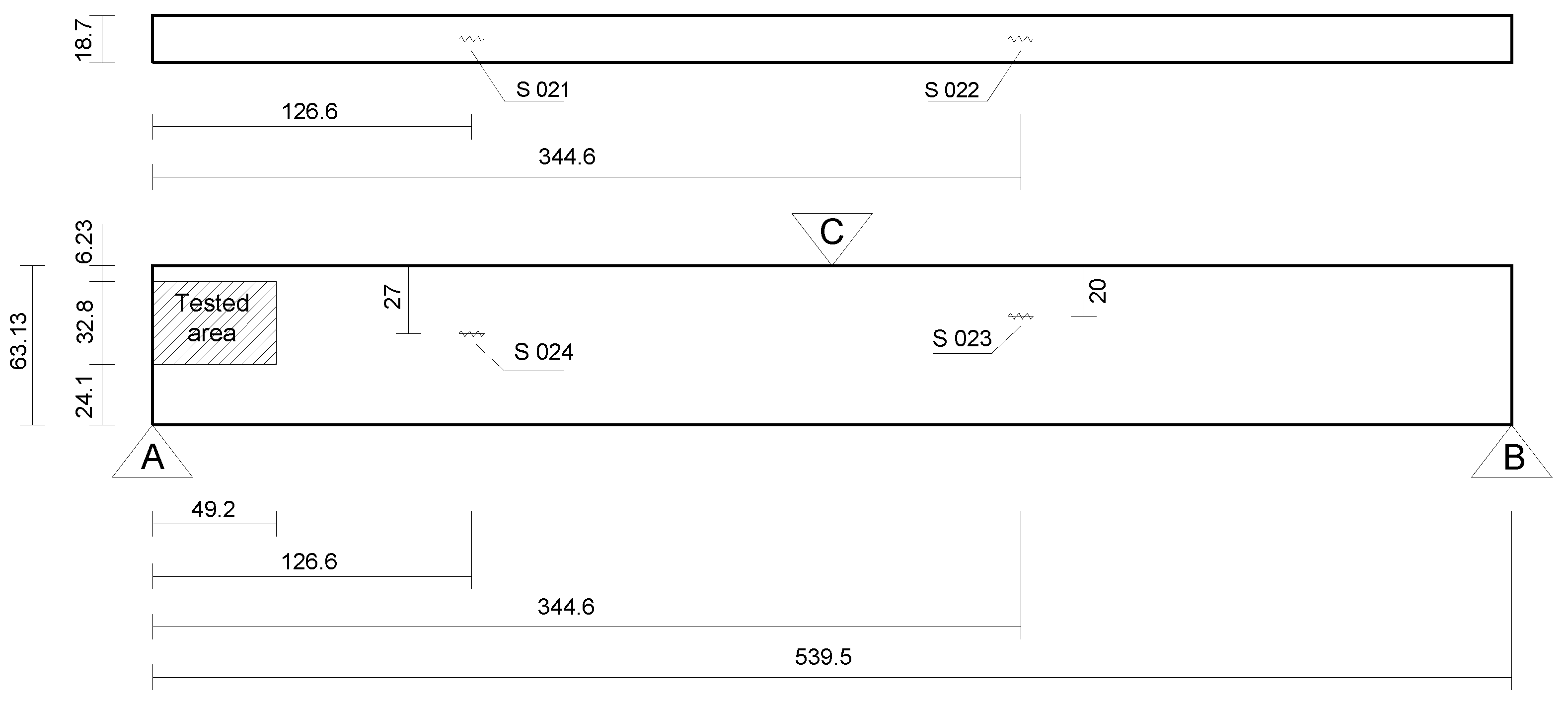
3.1. Experiment Setup
3.2. Optical Fiber Sensors
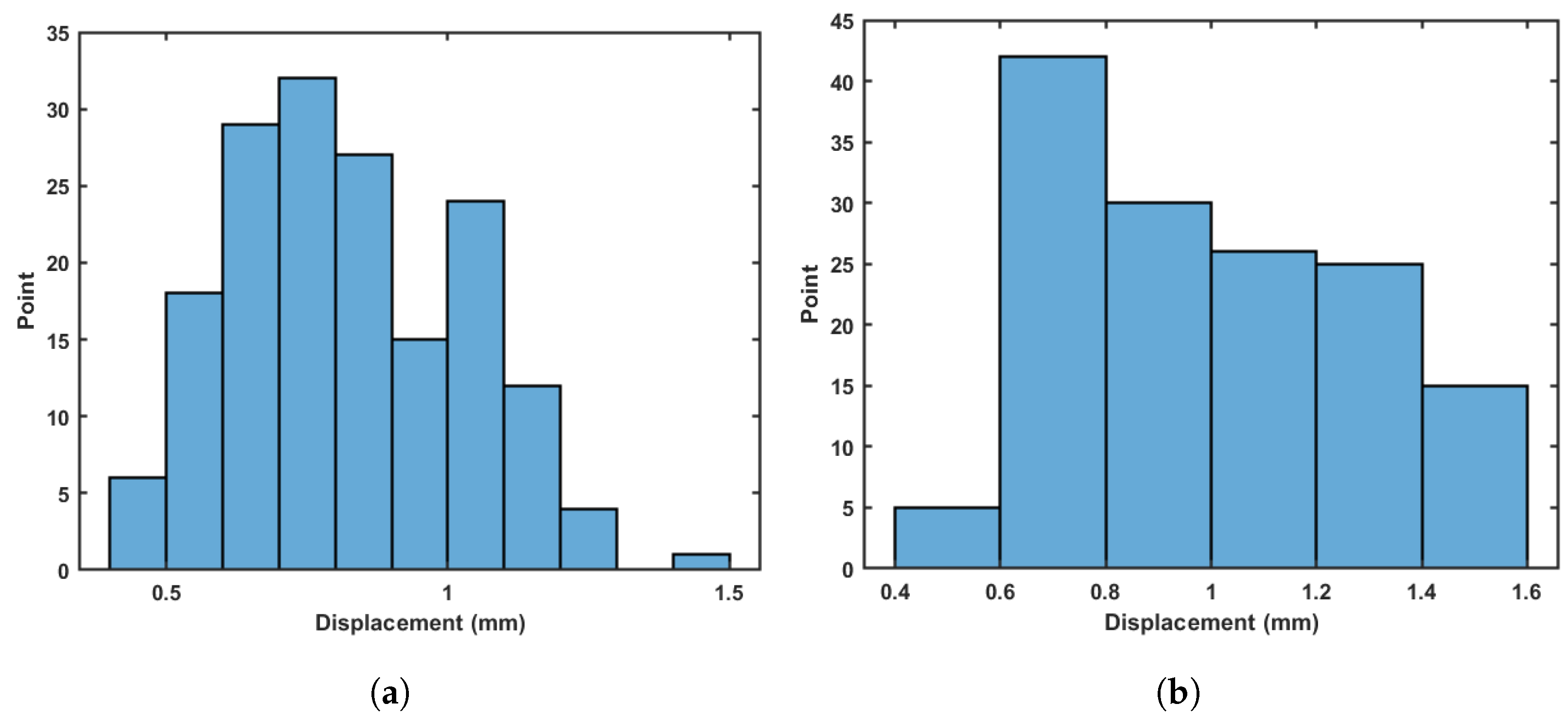
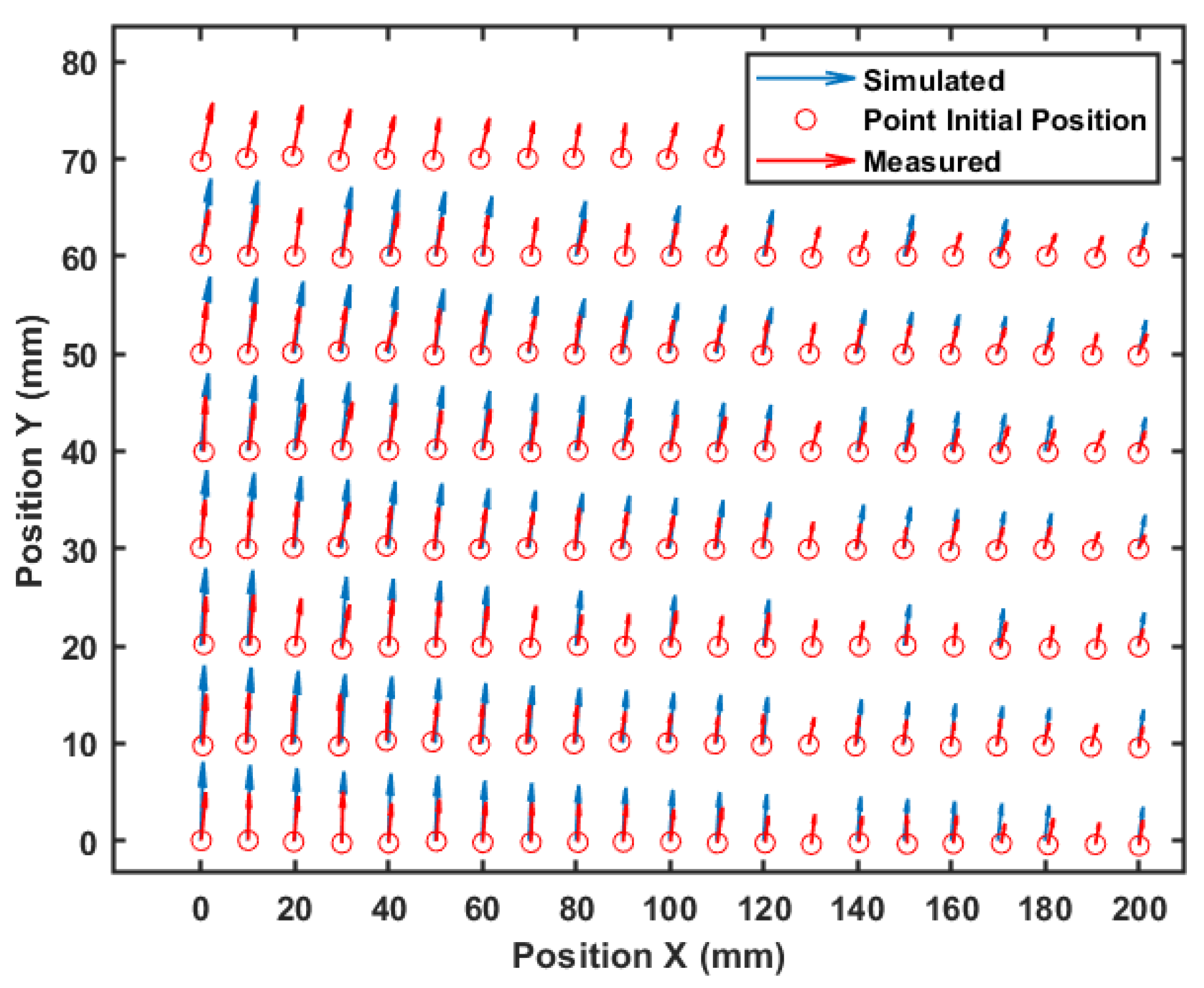
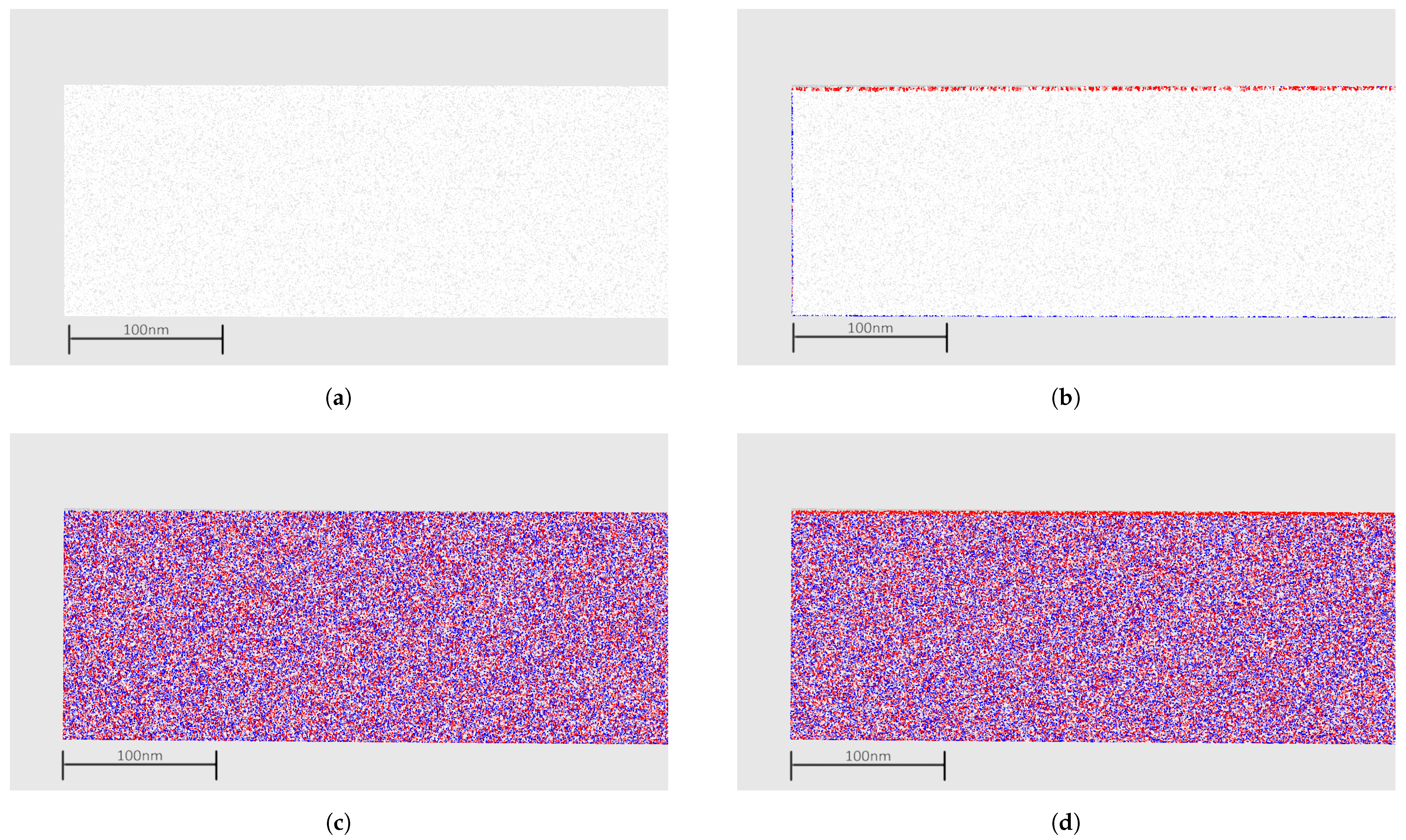
3.3. Photogrammetry Experiment
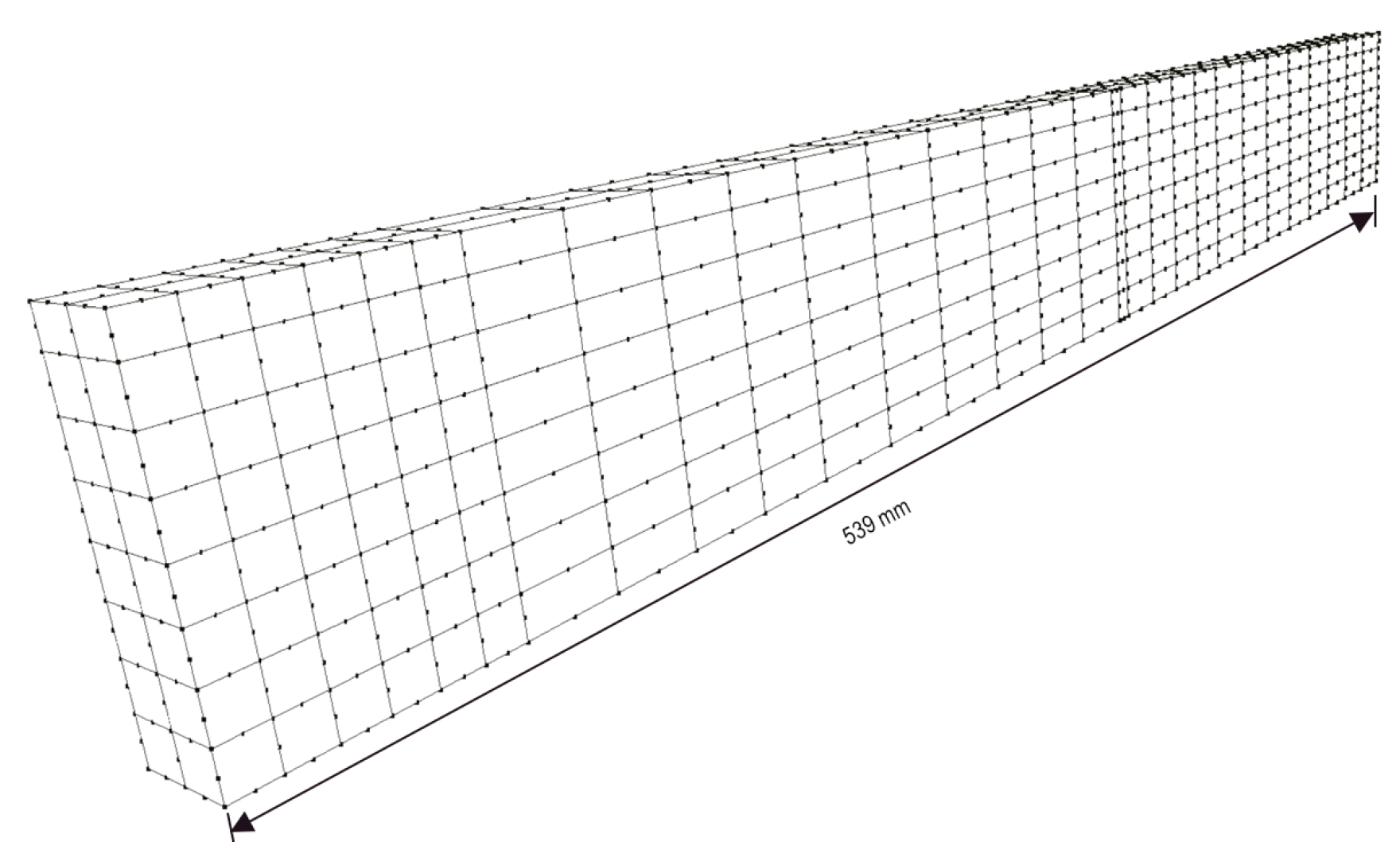
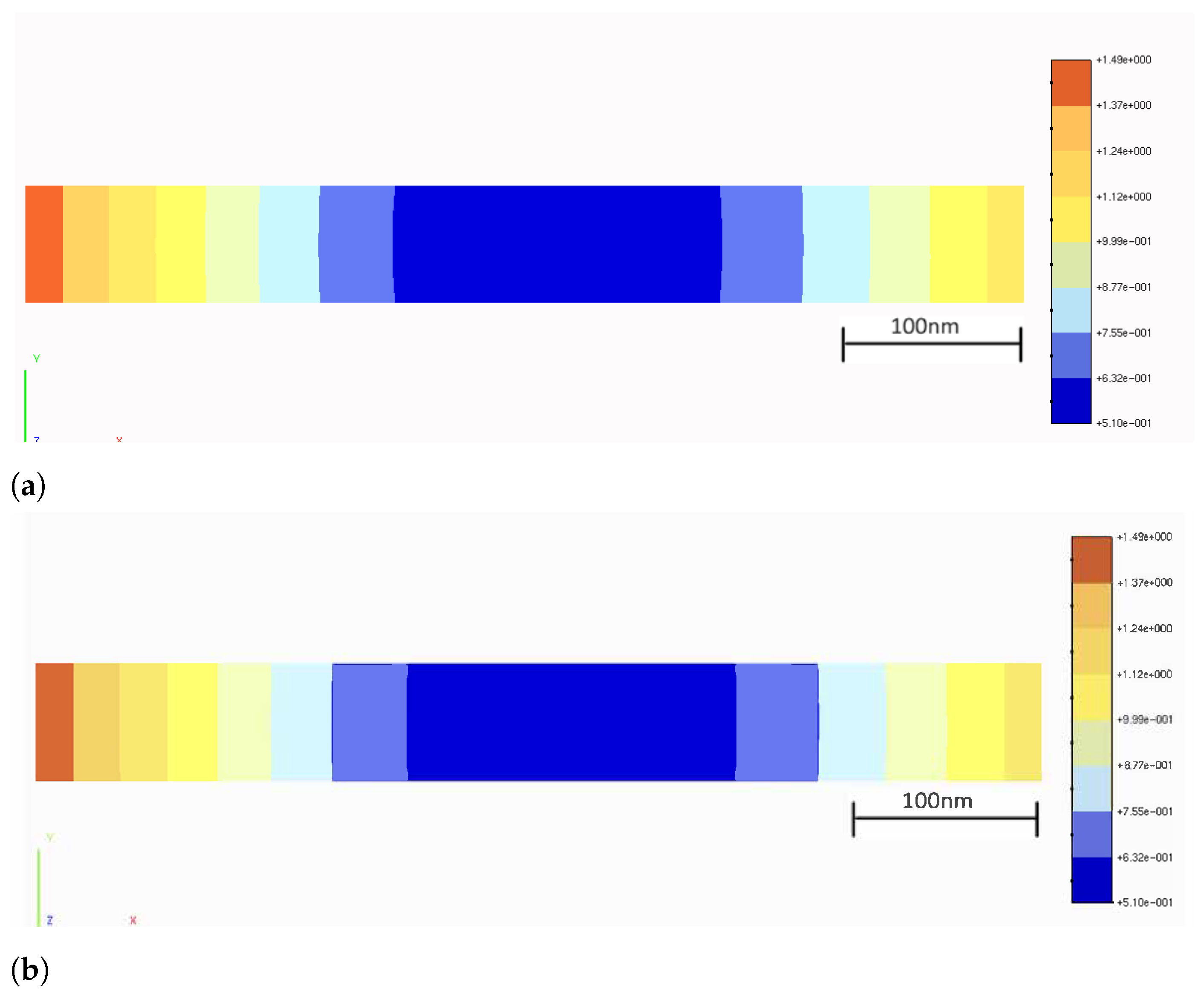
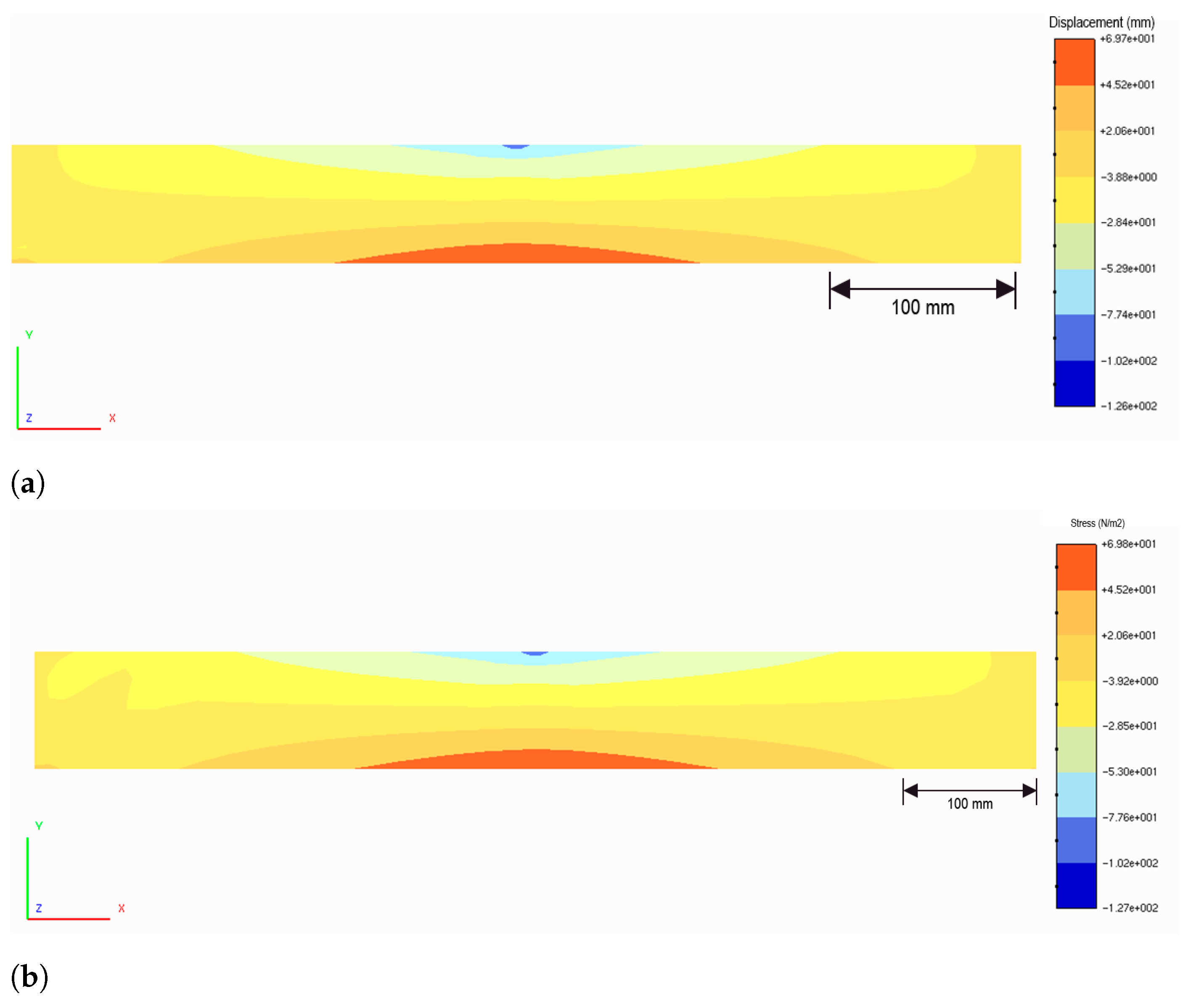
3.4. Boundary-Element Analysis
3.5. Analysis of Results
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Pinto, M.F.; Honorio, L.M.; Melo, A.; Marcato, A.L. A Robotic Cognitive Architecture for Slope and Dam Inspections. Sensors 2020, 20, 4579. [Google Scholar] [CrossRef]
- Biundini, I.Z.; Pinto, M.F.; Melo, A.G.; Marcato, A.L.; Honório, L.M.; Aguiar, M.J. A Framework for Coverage Path Planning Optimization Based on Point Cloud for Structural Inspection. Sensors 2021, 21, 570. [Google Scholar] [CrossRef] [PubMed]
- Melo, A.G.; Pinto, M.F.; Marcato, A.L.; Honório, L.M.; Coelho, F.O. Dynamic Optimization and Heuristics Based Online Coverage Path Planning in 3D Environment for UAVs. Sensors 2021, 21, 1108. [Google Scholar] [CrossRef]
- Scaioni, M.; Marsella, M.; Crosetto, M.; Tornatore, V.; Wang, J. Geodetic and remote-sensing sensors for dam deformation monitoring. Sensors 2018, 18, 3682. [Google Scholar] [CrossRef]
- do Carmo, F.F.; Kamino, L.H.Y.; Junior, R.T.; de Campos, I.C.; do Carmo, F.F.; Silvino, G.; da Silva Xavier de Castro, K.J.; Mauro, M.L.; Rodrigues, N.U.A.; de Souza Miranda, M.P.; et al. Fundão tailings dam failures: The environment tragedy of the largest technological disaster of Brazilian mining in global context. Perspect. Ecol. Conserv. 2017, 15, 145–151. [Google Scholar] [CrossRef]
- Gama, F.F.; Mura, J.C.; Paradella, W.R.; de Oliveira, C.G. Deformations Prior to the Brumadinho Dam Collapse Revealed by Sentinel-1 InSAR Data Using SBAS and PSI Techniques. Remote Sens. 2020, 12, 3664. [Google Scholar] [CrossRef]
- Losanno, D.; Hadad, H.A.; Serino, G. Seismic behavior of isolated bridges with additional damping under far-field and near fault ground motion. Earthq. Struct. 2017, 13, 119–130. [Google Scholar]
- Battista, R.C.; Pfeil, M.S. Reduction of vortex-induced oscillations of Rio-Niterói bridge by dynamic control devices. J. Wind. Eng. Ind. Aerodyn. 2000, 84, 273–288. [Google Scholar] [CrossRef]
- Peters, W.; Ranson, W. Digital imaging techniques in experimental stress analysis. Opt. Eng. 1982, 21, 213427. [Google Scholar] [CrossRef]
- Sutton, M.A.; Orteu, J.J.; Schreier, H. Image Correlation for Shape, Motion and Deformation Measurements: Basic Concepts, Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Liu, T.; Burner, A.W.; Jones, T.W.; Barrows, D.A. Photogrammetric techniques for aerospace applications. Prog. Aerosp. Sci. 2012, 54, 1–58. [Google Scholar] [CrossRef]
- Su, X.; Zhang, Q. Dynamic 3-D shape measurement method: A review. Opt. Lasers Eng. 2010, 48, 191–204. [Google Scholar] [CrossRef]
- Jiang, R.; Jáuregui, D.V.; White, K.R. Close-range photogrammetry applications in bridge measurement: Literature review. Measurement 2008, 41, 823–834. [Google Scholar] [CrossRef]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Arias, P.; Armesto, J.; Di-Capua, D.; González-Drigo, R.; Lorenzo, H.; Perez-Gracia, V. Digital photogrammetry, GPR and computational analysis of structural damages in a mediaeval bridge. Eng. Fail. Anal. 2007, 14, 1444–1457. [Google Scholar] [CrossRef]
- Bonilla-Sierra, V.; Scholtes, L.; Donzé, F.; Elmouttie, M. Rock slope stability analysis using photogrammetric data and DFN–DEM modelling. Acta Geotech. 2015, 10, 497–511. [Google Scholar] [CrossRef]
- Woloszyk, K.; Bielski, P.M.; Garbatov, Y.; Mikulski, T. Photogrammetry image-based approach for imperfect structure modelling and FE analysis. Ocean. Eng. 2021, 223, 108665. [Google Scholar] [CrossRef]
- Park, S.; Park, H.S.; Kim, J.; Adeli, H. 3D displacement measurement model for health monitoring of structures using a motion capture system. Measurement 2015, 59, 352–362. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection—A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Weng, Y.; Shan, J.; Lu, Z.; Lu, X.; Spencer, B.F., Jr. Homography-based structural displacement measurement for large structures using unmanned aerial vehicles. Comput. Aided Civ. Infrastruct. Eng. 2020. [Google Scholar] [CrossRef]
- Nasimi, R.; Moreu, F. A methodology for measuring the total displacements of structures using a laser–camera system. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 421–437. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SFM 3D model accuracy in high-relief landscapes by incorporating oblique images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Jafari, B.; Khaloo, A.; Lattanzi, D. Deformation tracking in 3D point clouds via statistical sampling of direct cloud-to-cloud distances. J. Nondestruct. Eval. 2017, 36, 65. [Google Scholar] [CrossRef]
- Vakhitov, A.; Lempitsky, V. Learnable line segment descriptor for visual SLAM. IEEE Access 2019, 7, 39923–39934. [Google Scholar] [CrossRef]
- Mukupa, W.; Roberts, G.W.; Hancock, C.M.; Al-Manasir, K. A review of the use of terrestrial laser scanning application for change detection and deformation monitoring of structures. Surv. Rev. 2017, 49, 99–116. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Daniel, S.; Guériot, D.; Sintès, C.; Caillec, J.M.L. Super-Resolution-Based Snake Model—An Unsupervised Method for Large-Scale Building Extraction using Airborne LiDAR Data and Optical Image. Remote Sens. 2020, 12, 1702. [Google Scholar] [CrossRef]
- Genovese, K.; Casaletto, L.; Rayas, J.; Flores, V.; Martinez, A. Stereo-digital image correlation (DIC) measurements with a single camera using a biprism. Opt. Lasers Eng. 2013, 51, 278–285. [Google Scholar] [CrossRef]
- Knyaz, V.A.; Kniaz, V.V.; Remondino, F.; Zheltov, S.Y.; Gruen, A. 3D Reconstruction of a Complex Grid Structure Combining UAS Images and Deep Learning. Remote Sens. 2020, 12, 3128. [Google Scholar] [CrossRef]
- Melo, A.G.; Pinto, M.F.; Honório, L.M.; Dias, F.M.; Masson, J.E. 3D Correspondence and Point Projection Method for Structures Deformation Analysis. IEEE Access 2020, 8, 177823–177836. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Vidal, V.; Honório, L.; Santos, M.; Silva, M.; Cerqueira, A.; Oliveira, E. UAV vision aided positioning system for location and landing. In Proceedings of the 2017 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; pp. 228–233. [Google Scholar]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Taddia, Y.; González-García, L.; Zambello, E.; Pellegrinelli, A. Quality Assessment of Photogrammetric Models for Façade and Building Reconstruction Using DJI Phantom 4 RTK. Remote Sens. 2020, 12, 3144. [Google Scholar] [CrossRef]
- Wood, R.L.; Mohammadi, M.E. LiDAR Scanning with Supplementary UAV Captured Images for Structural Inspections. In Proceedings of the International LiDAR Mapping Forum 2015, Denver, CO, USA, 23–25 February 2015. [Google Scholar]
- Burnett, J.D. Evaluation of Structure from Motion (SfM) in Compact, Long Hallways. LiDAR Mag. 2014, 4, 40–45. [Google Scholar]
- Xu, Y.; Brownjohn, J.M. Review of machine-vision based methodologies for displacement measurement in civil structures. J. Civ. Struct. Health Monit. 2018, 8, 91–110. [Google Scholar] [CrossRef]
- Chang, C.; Xiao, X. Three-dimensional structural translation and rotation measurement using monocular videogrammetry. J. Eng. Mech. 2010, 136, 840–848. [Google Scholar] [CrossRef]
- Khuc, T.; Catbas, F.N. Computer vision-based displacement and vibration monitoring without using physical target on structures. Struct. Infrastruct. Eng. 2017, 13, 505–516. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Yoon, H.; Elanwar, H.; Choi, H.; Golparvar-Fard, M.; Spencer Jr, B.F. Target-free approach for vision-based structural system identification using consumer-grade cameras. Struct. Control Health Monit. 2016, 23, 1405–1416. [Google Scholar] [CrossRef]
- Khaloo, A.; Lattanzi, D. Pixel-wise structural motion tracking from rectified repurposed videos. Struct. Control Health Monit. 2017, 24, e2009. [Google Scholar] [CrossRef]
- Korosov, A.A.; Rampal, P. A combination of feature tracking and pattern matching with optimal parametrization for sea ice drift retrieval from SAR data. Remote Sens. 2017, 9, 258. [Google Scholar] [CrossRef]
- Acikgoz, S.; DeJong, M.J.; Soga, K. Sensing dynamic displacements in masonry rail bridges using 2D digital image correlation. Struct. Control Health Monit. 2018, 25, e2187. [Google Scholar] [CrossRef]
- Kromanis, R.; Xu, Y.; Lydon, D.; Martinez del Rincon, J.; Al-Habaibeh, A. Measuring structural deformations in the laboratory environment using smartphones. Front. Built Environ. 2019, 5. [Google Scholar] [CrossRef]
- Harmanci, Y.E.; Gülan, U.; Holzner, M.; Chatzi, E. A novel approach for 3D-structural identification through video recording: Magnified tracking. Sensors 2019, 19, 1229. [Google Scholar] [CrossRef]
- Dong, C.Z.; Celik, O.; Catbas, F.N.; OBrien, E.; Taylor, S. A robust vision-based method for displacement measurement under adverse environmental factors using spatio-temporal context learning and taylor approximation. Sensors 2019, 19, 3197. [Google Scholar] [CrossRef]
- Dong, C.Z.; Celik, O.; Catbas, F.N.; O’Brien, E.J.; Taylor, S. Structural displacement monitoring using deep learning-based full field optical flow methods. Struct. Infrastruct. Eng. 2020, 16, 51–71. [Google Scholar] [CrossRef]
- Liu, T.; Niu, M.; Yang, Y. Ice velocity variations of the polar record glacier (East Antarctica) using a rotation-invariant feature-tracking approach. Remote Sens. 2018, 10, 42. [Google Scholar] [CrossRef]
- Kassotakis, N.; Sarhosis, V.; Riveiro, B.; Conde, B.; D’Altri, A.M.; Mills, J.; Milani, G.; de Miranda, S.; Castellazzi, G. Three-dimensional discrete element modelling of rubble masonry structures from dense point clouds. Autom. Constr. 2020, 119, 103365. [Google Scholar] [CrossRef]
- Truong-Hong, L.; Laefer, D.F.; Hinks, T.; Carr, H. Combining an angle criterion with voxelization and the flying voxel method in reconstructing building models from LiDAR data. Comput. Aided Civ. Infrastruct. Eng. 2013, 28, 112–129. [Google Scholar] [CrossRef]
- Truong-Hong, L.; Laefer, D.F. Application of terrestrial laser scanner in bridge inspection: Review and an opportunity. In Proceedings of the 37th IABSE Symposium: Engineering for Progress, Nature and People, Madrid, Spain, 3–5 September 2014. [Google Scholar]
- Pinto, M.F.; Honório, L.M.; Marcato, A.L.; Dantas, M.A.; Melo, A.G.; Capretz, M.; Urdiales, C. ARCog: An Aerial Robotics Cognitive Architecture. Robotica 2020, 39, 483–502. [Google Scholar] [CrossRef]
- Xu, W.; Neumann, I. Finite element analysis based on a parametric model by approximating point clouds. Remote Sens. 2020, 12, 518. [Google Scholar] [CrossRef]
- Bathe, K.J. Finite Element Procedures; Prentice-Hall, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Brebbia, C.A.; Telles, J.C.; Wrobel, L.C. Boundary Element Techniques; Springer: Berlin/Heidelberg, Germany, 1984. [Google Scholar]
- Banerjee, P.K.; Butterfield, R. Boundary Element Methods in Engineering Science; McGraw-Hill: New York, NJ, USA, 1981. [Google Scholar]
- Becker, A.A. The Boundary Element Method in Engineering: A Complete Course; McGraw-Hill Companies: New York, NJ, USA, 1992. [Google Scholar]
- Chen, G.; Zhou, J. Boundary Element Methods; Academic Press: London, UK, 1992; Volume 92. [Google Scholar]
- Ansys Product Launcher Release 17.0; Ansys Inc.: Canonsburg, PA, USA, 2016.
- CSI Analysis Reference Manual for SAP2000, ETABS, and SAFE; Computers and Structures, Inc.: Berkeley, CA, USA, 2010.
- ABAQUS/CAE. Abaqus Software. Ultimate Version 6.14-1; Dassault Systemes Simulia Corp.: Povidence, RI, USA, 2014. [Google Scholar]
- Araújo, F.C.; Silva, K.I.; Telles, J.C. Generic domain decomposition and iterative solvers for 3D BEM problems. Int. J. Numer. Methods Engrg. 2006, 68, 448–472. [Google Scholar] [CrossRef]
- De Araujo, F.C. Evaluation of effective material parameters of CNT-reinforced composites via 3D BEM. Comput. Model. Eng. Sci. 2008, 24, 103–121. [Google Scholar]
- Araújo, F.C.; d’Azevedo, E.F.; Gray, L.J. Boundary-element parallel-computing algorithm for the microstructural analysis of general composites. Comput. Struct. 2010, 88, 773–784. [Google Scholar] [CrossRef][Green Version]
- de Araújo, F.; D’Azevedo, E.; Gray, L.; Degenhardt, R. A SBS-BD based solver for domain decomposition in BE methods. Eng. Anal. Bound. Elem. 2013, 37, 1267–1275. [Google Scholar] [CrossRef][Green Version]
- Iheaturu, C.J.; Ayodele, E.G.; Okolie, C.J. An assessment of the accuracy of structure-from-motion (SfM) photogrammetry for 3D terrain mapping. Geomat. Landmanagement Landsc. 2020, 2, 65–82. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Wang, H.; Wan, H.P.; Mao, J.X.; Xu, Y.C. Anomaly detection of structural health monitoring data using the maximum likelihood estimation-based Bayesian dynamic linear model. Struct. Health Monit. 2020. [Google Scholar] [CrossRef]
- Wiesel, A.; Eldar, Y.C.; Beck, A. Maximum likelihood estimation in linear models with a Gaussian model matrix. IEEE Signal Process. Lett. 2006, 13, 292–295. [Google Scholar] [CrossRef]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity; Cambridge University Press: Dover, UK, 1944. [Google Scholar]
- Bonnet, M. Boundary Integral Equation Methods for Fluids and Solids; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Wrobel, L.C.; Aliabadi, M.H. The Boundary Element Method: Applications in Solids and Structures; John Wiley & Sons: Hoboken, NJ, USA, 2002; Volume 2. [Google Scholar]
- Beer, G.; Smith, I.; Duenser, C. The Boundary Element Method with Programming For Engineers and Scientists; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Katsikadelis, J.T. The Boundary Element Method for Engineers and Scientists—Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Timoshenko, S.P.; Goodier, J. Theory of Elasticity; McGraw-Hill Int. Book Company: New York, NY, USA, 1982. [Google Scholar]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (NZ). ISPRS J. Photogramm. Remote. Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S021 | S022 | S023 | S024 | ||||
|---|---|---|---|---|---|---|---|
| (nm) | (nm) | (nm) | (nm) | ||||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.180 | 0.063 | 0.52 | 0.054 | ||||
| 0.324 | 0.140 | 0.101 | 0.098 | ||||
| 0.537 | 0.200 | 0.126 | 0.171 | ||||
| 0.728 | 0.285 | 0.194 | 0.216 | ||||
| Prescribed Displacements (mm) | |||
|---|---|---|---|
| Support | |||
| A | 1.49 | 0.00 | |
| B | unrestrained | 1.22 | unrestrained |
| C | unrestrained | 0.51 | unrestrained |
| Position | Optical Fiber Sensor | BE Analysis I | BE Analysis II |
|---|---|---|---|
| S021 | |||
| S022 | |||
| S023 | |||
| S024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Honório, L.M.; Pinto, M.F.; Hillesheim, M.J.; de Araújo, F.C.; Santos, A.B.; Soares, D., Jr. Photogrammetric Process to Monitor Stress Fields Inside Structural Systems. Sensors 2021, 21, 4023. https://doi.org/10.3390/s21124023
Honório LM, Pinto MF, Hillesheim MJ, de Araújo FC, Santos AB, Soares D Jr. Photogrammetric Process to Monitor Stress Fields Inside Structural Systems. Sensors. 2021; 21(12):4023. https://doi.org/10.3390/s21124023
Chicago/Turabian StyleHonório, Leonardo M., Milena F. Pinto, Maicon J. Hillesheim, Francisco C. de Araújo, Alexandre B. Santos, and Delfim Soares, Jr. 2021. "Photogrammetric Process to Monitor Stress Fields Inside Structural Systems" Sensors 21, no. 12: 4023. https://doi.org/10.3390/s21124023
APA StyleHonório, L. M., Pinto, M. F., Hillesheim, M. J., de Araújo, F. C., Santos, A. B., & Soares, D., Jr. (2021). Photogrammetric Process to Monitor Stress Fields Inside Structural Systems. Sensors, 21(12), 4023. https://doi.org/10.3390/s21124023