
Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic



 ,
, 

Abstract
1. Introduction
2. Instrumentation
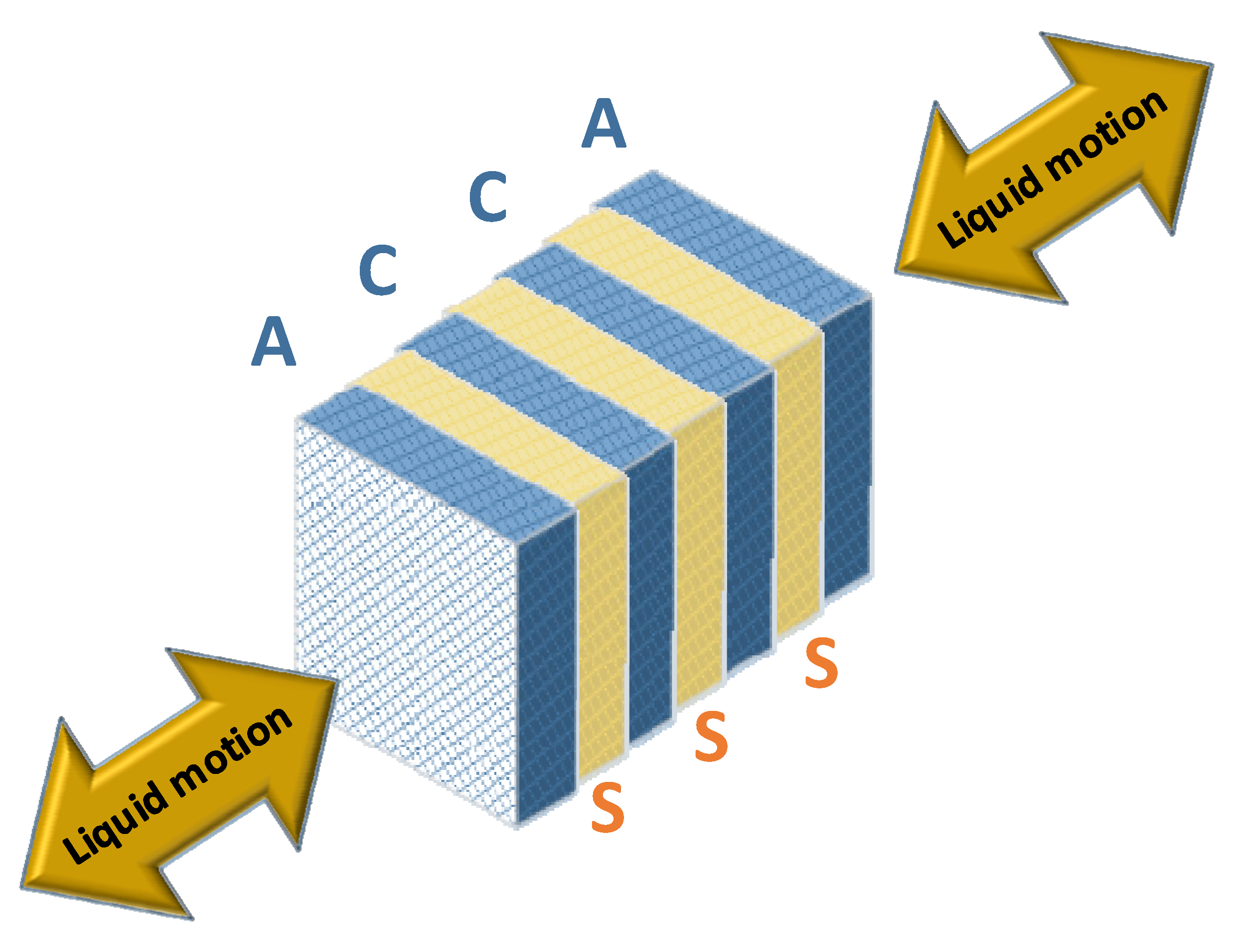
2.1. Broadband MET Seismometers
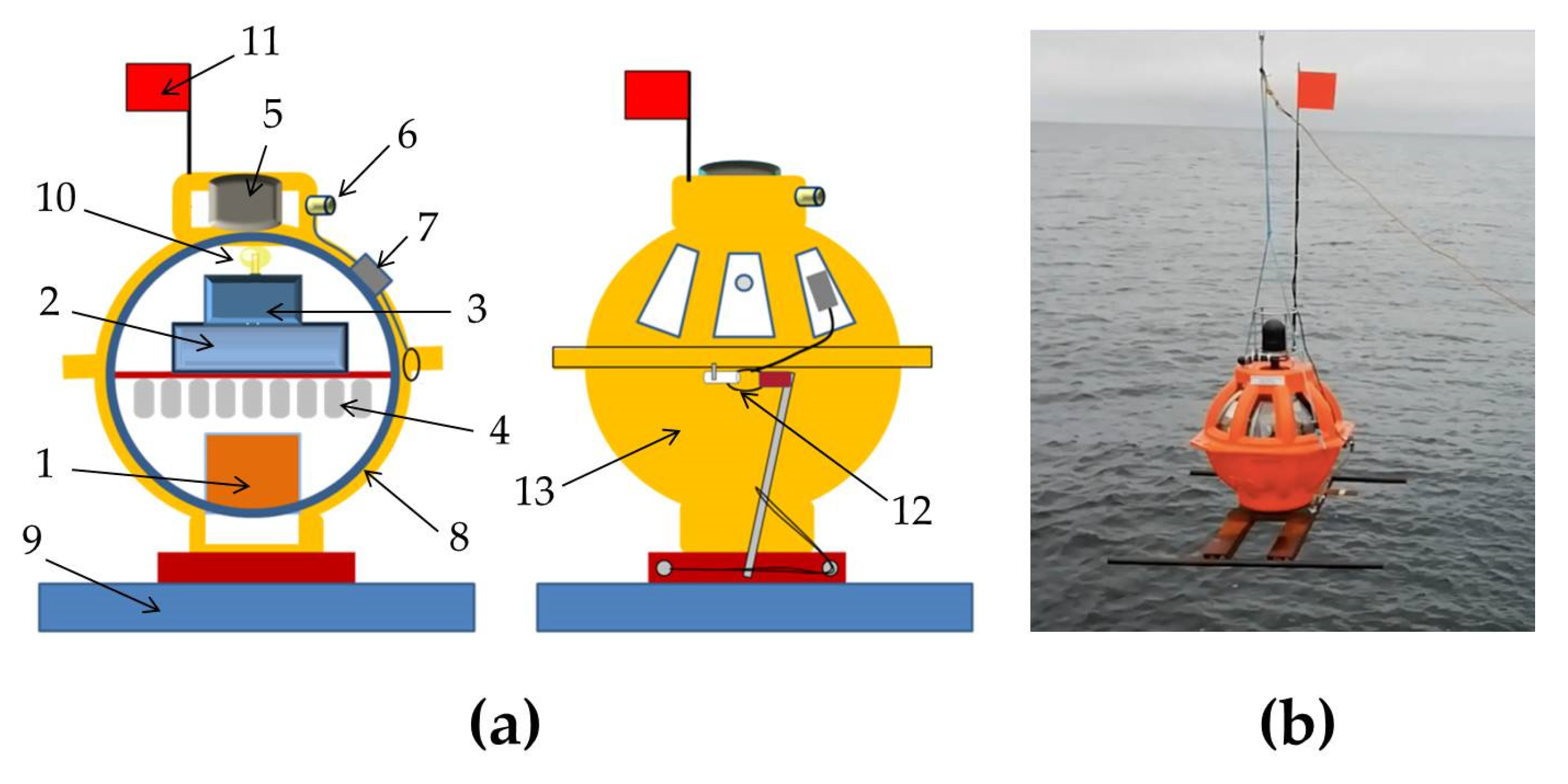
2.2. OBS Modifications for Shallow Waters
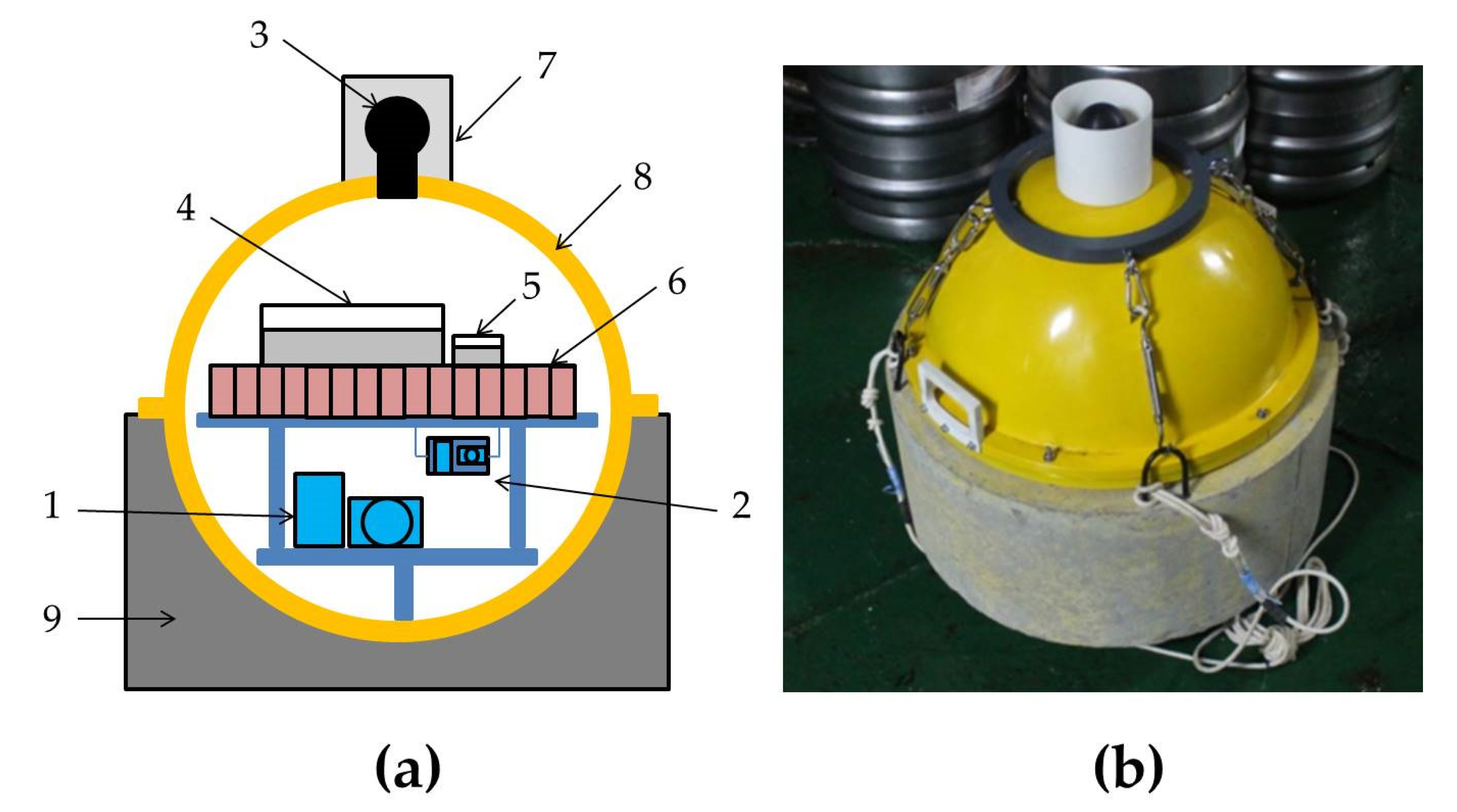
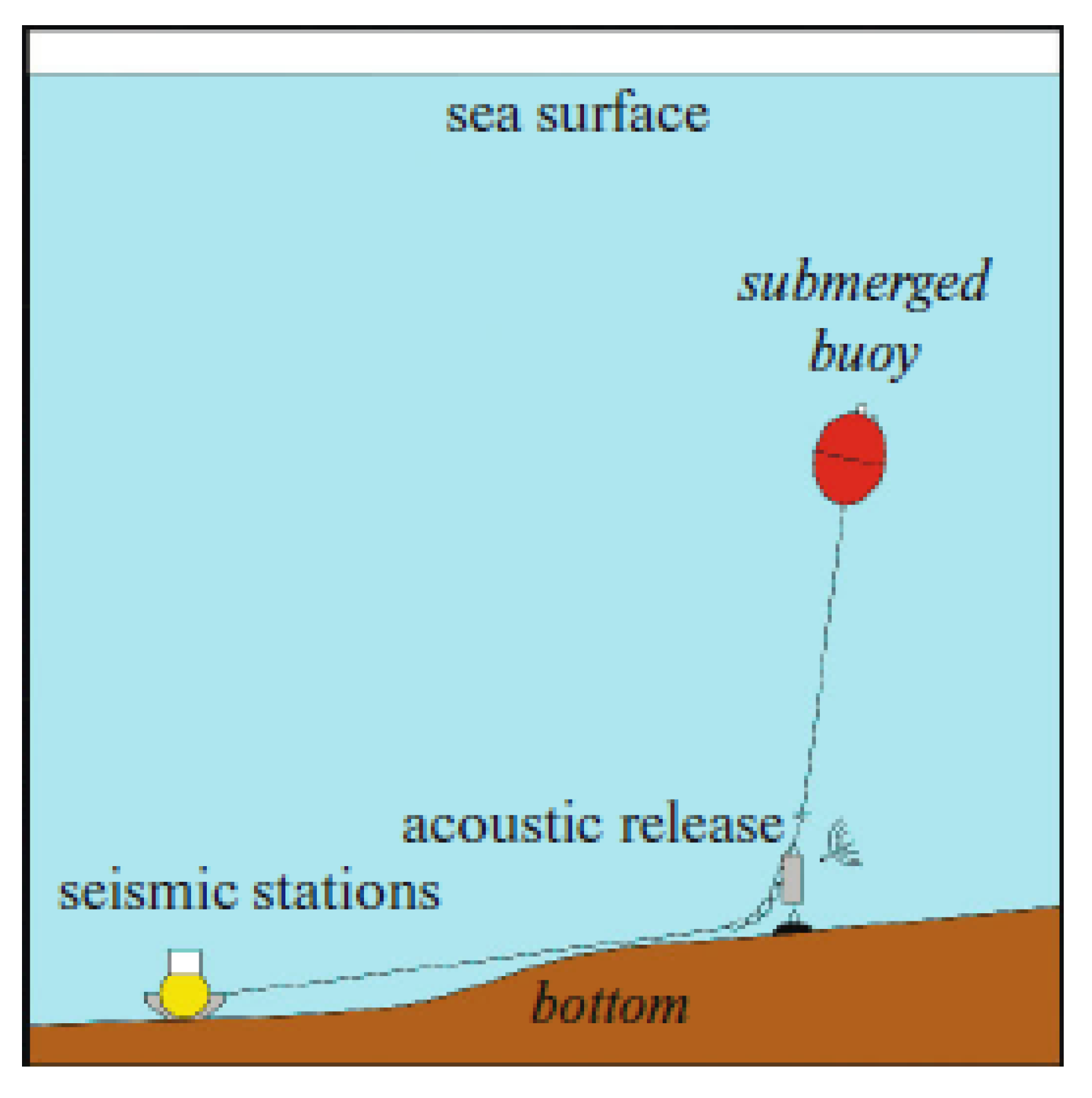
2.3. OBS Modification for Deep Waters
- Multiple seabed deployment/recoveries without opening or recharging the node.
- Automatic clock synchronization with GPS signals through the instrument case. Built-in GPS receiver, activated automatically after surfacing node from the seabed.
- Wireless on/off power switch. No need to open the node case after the transport and seabed recovery, all preparation and tests before deployment could be performed on a vessel deck.
- Wireless user interface. Fast data download after the node retrieval to a ship deck.
- Automatic and manual tests of power supply, seismic recorder and acoustic release.
3. OBS Deployment Case Study in the Arctic and the First Results
3.1. Scientific Cruises to the Laptev Sea
3.2. Recording of Ambient Seismic Noise in the Laptev Sea
3.3. Registration of the Teleseismic Signals
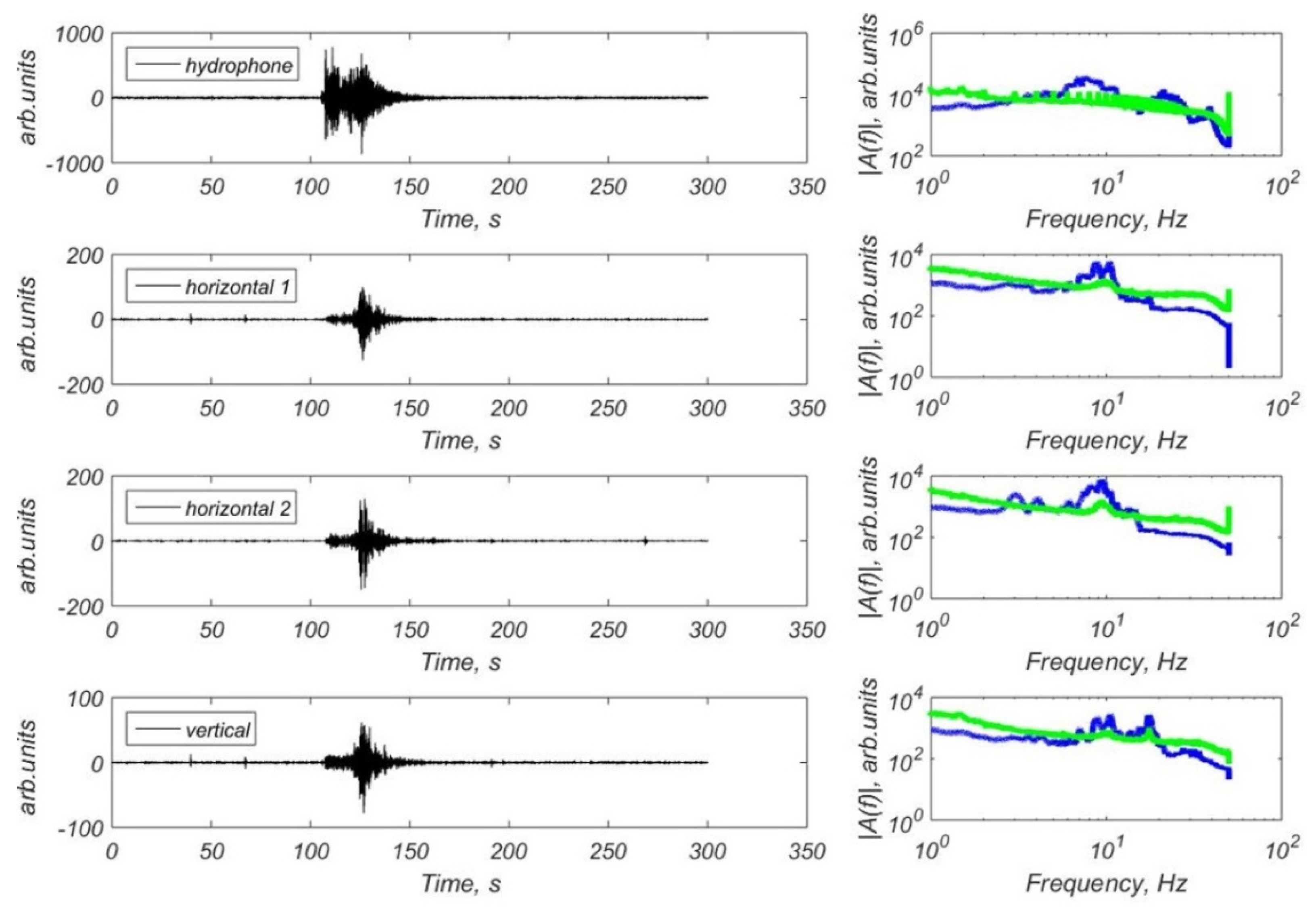
3.4. Registration of the Signals from Local Earthquakes
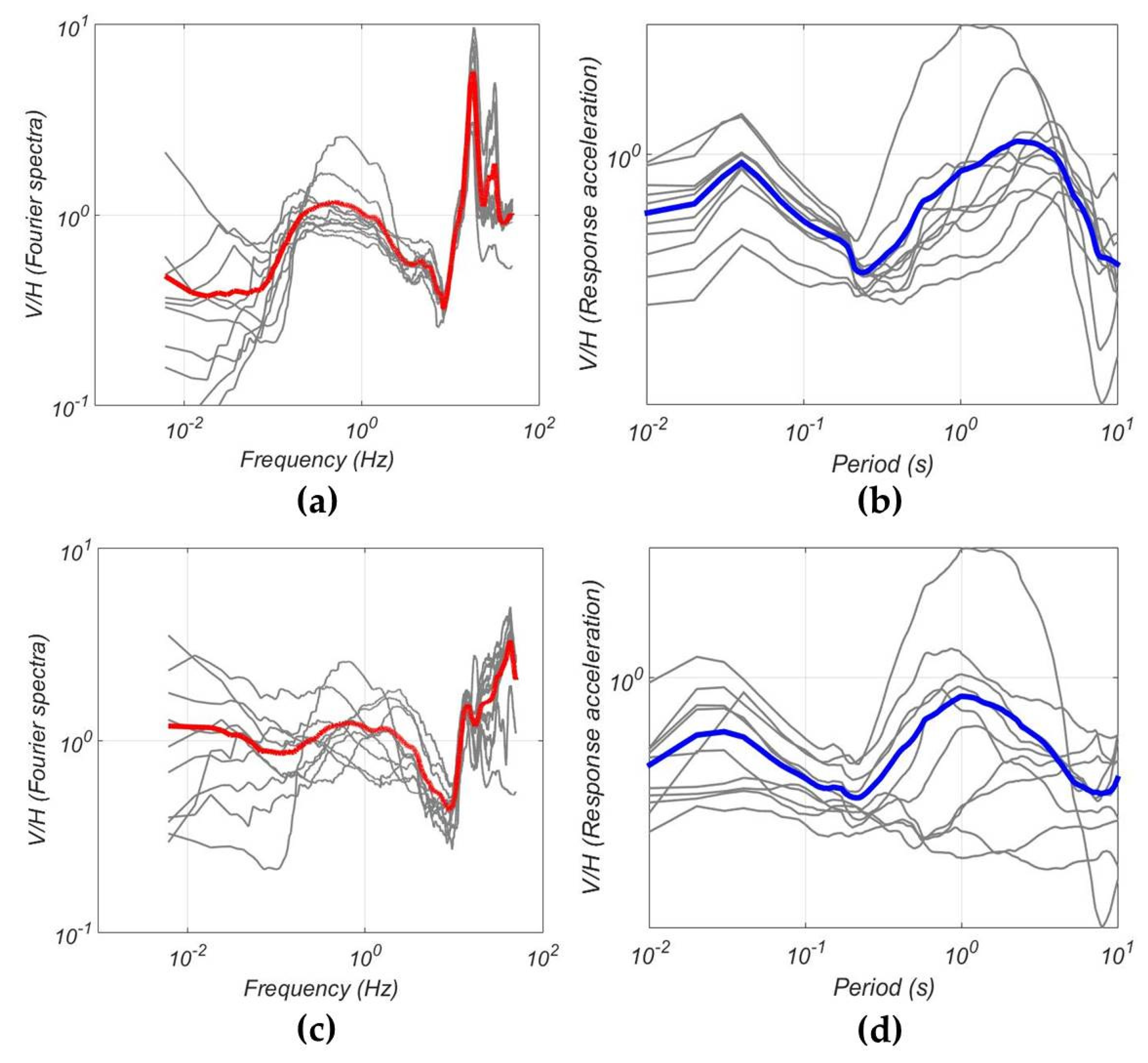
3.5. Site Response Analysis
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Seismic Building Design Code. «SR 14.13330.2018 Construction in Seismic Areas». HAMK: Moscow, Russia, 2018; 122p. [Google Scholar]
- Intergovernmental Panel on Climate Change. Climate Change 2014: Synthesis Report. Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Core Writing Team, Pachauri, R.K., Meyer, L.A., Eds.; IPCC: Geneva, Switzerland, 2014. [Google Scholar]
- Shakhova, N.; Semiletov, I.; Sergienko, V.; Lobkovsky, L.; Yusupov, V.; Salyuk, A.; Salomatin, A.; Chernykh, D.; Kosmach, D.; Panteleev, G.; et al. The East Siberian Arctic Shelf: Towards further assessment of permafrost-related methane fluxes and role of sea ice. Phil. Trans. R. Soc. A. 2015, 373, 20140451. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Gustafsson, Ö.; Sergienko, V.; Lobkovsky, L.; Dudarev, O.; Tumskoy, V.; Grigoriev, M.; Mazurov, A.; Salyuk, A.; et al. Current rates and mechanisms of subsea permafrost degradation in the East Siberian Arctic Shelf. Nat. Commun. 2017, 8, 15872. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Chuvilin, E. Understanding the Permafrost–Hydrate System and Associated Methane Releases in the East Siberian Arctic Shelf. Geosciences 2019, 9, 251. [Google Scholar] [CrossRef]
- Lee, W.H.K.; Kanamori, H.; Jennings, P.C.; Kisslinger, C. International Handbook of Earthquake and Engineering Seismology, Part B, 1st ed.Academic Press: London, UK, 2003; Volume 81B, pp. 937–1948. [Google Scholar]
- Bormann, P. (Ed.) New Manual of Seismological Observatory Practice (NMSOP-2); Deutsches GeoForschungsZentrum GFZ, IASPEI: Potsdam, Germany, 2012. [Google Scholar]
- Krylov, A.A.; Ivashchenko, A.I.; Kovachev, S.A.; Tsukanov, N.V.; Kulikov, M.E.; Medvedev, I.P.; Ilinskiy, D.A.; Shakhova, N.E. The Seismotectonics and Seismicity of the Laptev Sea Region: The Current Situation and a First Experience in a Year-Long Installation of Ocean Bottom Seismometers on the Shelf. J. Volcanolog. Seismol. 2020, 14, 379–393. [Google Scholar] [CrossRef]
- Ananyev, R.; Dmitrevskiy, N.; Jakobsson, M.; Lobkovsky, L.; Nikiforov, S.; Roslyakov, A.; Semiletov, I. Sea-ice ploughmarks in the eastern Laptev Sea, East Siberian Arctic shelf. Geol. Soc. Lond. Mem. 2016, 46, 301–302. [Google Scholar] [CrossRef]
- Nikiforov, S.L.; Ananiev, R.A.; Libina, N.V.; Dmitrevskiy, N.N.; Lobkovskii, L.I. Ice Gouging on Russia’s Arctic Shelf. Oceanology 2019, 59, 422–424. [Google Scholar] [CrossRef]
- Sobisevich, L.; Agafonov, V.; Presnov, D.; Gravirov, V.; Likhodeev, D.; Zhostkov, R. The Advanced Prototype of the Geohydroacoustic Ice Buoy. Sensors 2020, 20, 7213. [Google Scholar] [CrossRef]
- Antonov, A.; Shabalina, A.; Razin, A.; Avdyukhina, S.; Egorov, I.; Agafonov, V. Low-Frequency Seismic Node Based on Molecular-Electronic Transfer Sensors for Marine and Transition Zone Exploration. J. Atmos. Ocean. Technol. 2017, 34, 1743–1748. [Google Scholar] [CrossRef]
- Gorbenko, V.I.; Zhostkov, R.A.; Likhodeev, D.V.; Presnov, D.A.; Sobisevich, A.L. Feasibility of using molecular-electronic seismometers in passive seismic prospecting: Deep structure of the Kaluga ring structure from microseismic sounding. Seism. Instr. 2017, 53, 181–191. [Google Scholar] [CrossRef]
- Presnov, D.A.; Zhostkov, R.A.; Shurup, A.S.; Sobisevich, A.L. On-site observations of seismoacoustic waves under the conditions of an ice-covered water medium. Bull. Russ. Acad. Sci. Phys. 2017, 81, 68–71. [Google Scholar] [CrossRef]
- Sobisevich, A.L.; Presnov, D.A.; Zhostkov, R.A.; Sobisevich, L.E.; Shurup, A.S.; Likhodeev, D.V.; Agafonov, V.M. Geohydroacoustic Noise Monitoring of Under-Ice Water Areas of Northern Seas. Seism. Instr. 2018, 54, 611–618. [Google Scholar] [CrossRef]
- Egorov, E.; Shabalina, A.; Zaitsev, D.; Kurkov, S.; Gueorguiev, N. Frequency Response Stabilization and Comparative Studies of MET Hydrophone at Marine Seismic Exploration Systems. Sensors 2020, 20, 1944. [Google Scholar] [CrossRef]
- R-Sensors, Seismic Instruments for Science and Engineering. Available online: http://www.r-sensors.ru/en/ (accessed on 29 April 2021).
- Agafonov, V.M.; Neeshpapa, A.V.; Shabalina, A.S. Electrochemical Seismometers of Linear and Angular Motion. In Encyclopedia of Earthquake Engineering; Beer, M., Kougioumtzoglou, I.A., Patelli, E., Au, S.K., Eds.; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Nesterov, A.S. Convective current in a four-electrode electrochemical cell at various boundary conditions at anodes. Russ. J. Electrochem. 2005, 41, 880–884. [Google Scholar] [CrossRef]
- Zaitsev, D.L.; Dudkin, P.V.; Krishtop, T.V.; Neeshpapa, A.V.; Popov, V.G.; Uskov, V.V.; Krishtop, V.G. Experimental Studies of Temperature Dependence of Transfer Function of Molecular Electronic Transducers at High Frequencies. IEEE Sens. J. 2016, 16. [Google Scholar] [CrossRef]
- Chikishev, D.A.; Zaitsev, D.L.; Belotelov, K.S.; Egorov, I.V. The temperature dependence of amplitude- frequency response of the MET sensor of linear motion in a broad frequency range. IEEE Sens. J. 2019, 19, 9653–9661. [Google Scholar] [CrossRef]
- Magic Xtal Ltd. Production of Advanced Oven Controlled Crystal Oscillators. Available online: http://magicxtal.com/products/?S=18&C=103&I=348 (accessed on 29 April 2021).
- RBR. Available online: https://rbr-global.com/products/standard-loggers/rbrvirtuoso-rbrduo (accessed on 29 April 2021).
- Piskarev, A.L. Arctic Basin (Geology and Morphology); VNIIOkeangeologiya: Saint Petersburg, Russia, 2016; 291p. (In Russian) [Google Scholar]
- Field, M.E.; Jennings, A.E. Seafloor gas seeps triggered by a northern California earthquake. Mar. Geol. 1987, 77, 39–51. [Google Scholar] [CrossRef]
- Kelley, J.T.; Dickson, S.M.; Belknap, D.F.; Barnhardt, W.A.; Henderson, M. Giant sea-bed pockmarks: Evidence for gas escape from Belfast Bay. Mar. Geol. 1994, 22, 59–62. [Google Scholar] [CrossRef]
- Kuşçu, I.; Okamura, M.; Matsuoka, H.; Gökaşan, E.; Awata, Y.; Tur, H.; Şimşek, M.; Keçer, M. Seafloor gas seeps and sediment failures triggered by the August 17, 1999 earthquake in the Eastern part of the Gulf of Izmit, Sea of Marmara, NW Turkey. Mar. Geol. 2005, 215, 193–214. [Google Scholar] [CrossRef]
- Bondur, V.G.; Kuznetsova, T.V. Identification of gas seeps in the Arctic seas using remote sensing data. Issledov. Zemli Iz Kosm. 2015, 4, 30–43. (In Russian) [Google Scholar]
- Obzhirov, A.I. On gas–geochemical precursors of seismicity increases, earthquakes, and volcanic occurrences in Kamchatka and in the Sea of Okhotsk. Geosist. Perekhodnykh Zon 2018, 2, 57–68. (In Russian) [Google Scholar]
- Sobisevich, A.L.; Presnov, D.A.; Sobisevich, L.E.; Shurup, A.S. Localization of Geological Inhomogeneities on the Arctic Shelf by Analysis of the Seismoacoustic Wave Field Mode Structure. Dokl. Earth Sc. 2018, 479, 355–357. [Google Scholar] [CrossRef]
- IRIS, Incorporated Research Institutions for Seismology. Available online: http://ds.iris.edu/mda/IU/TIXI/?starttime=1995-08-15T00:00:00&endtime=2599-12-31T23:59:59 (accessed on 29 April 2021).
- Welch, P.D. The use of Fast Fourier Transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, AU-15, 70–73. [Google Scholar] [CrossRef]
- OSI SAF Global Sea Ice Concentration Climate Data Record v2.0—Multimission, EUMETSAT SAF on Ocean and Sea Ice. 2017. Available online: https://navigator.eumetsat.int/product/EO:EUM:DAT:MULT:OSI-450 (accessed on 29 April 2021).
- Ebeling, C.W. Inferring Ocean Storm Characteristics from Ambient Seismic Noise: A Historical Perspective. Advances in Geophysics, Chapter 1. In Advances in Geophysics; Dmowska, R., Ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2012; Volume 53, pp. 1–170. [Google Scholar] [CrossRef]
- Webb, S.C. Broadband seismology and noise under the ocean. Rev. Geophys. 1998, 36, 105–142. [Google Scholar] [CrossRef]
- U.S. Geological Survey. Available online: https://earthquake.usgs.gov/earthquakes/search/ (accessed on 29 April 2021).
- International Seismological Centre. Available online: https://doi.org/10.31905/D808B830 (accessed on 29 April 2021).
- “Earthquakes of Russia” Database. Geophysical Survey of the Russian Academy of Sciences. Available online: http://eqru.gsras.ru/ (accessed on 29 April 2021).
- Drachev, S.S.; Kaul, N.; Beliaev, V.N. Eurasia spreading basin to Laptev Shelf transition: Structural pattern and heat flow. Geophys. J. Int. 2003, 152, 688–698. [Google Scholar] [CrossRef]
- Kramer, S.L. Geotechnical Earthquake Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 1996; 653p. [Google Scholar]
- Boore, D.M.; Smith, C.E. Analysis of earthquake recordings obtained from the seafloor earthquake measurement system (SEMS) instruments deployed off the coast of Southern California. Bull. Seismol. Soc. Am. 1999, 89, 260–274. [Google Scholar] [CrossRef]
- Diao, H.; Hu, J.; Xie, L. Effect of seawater on incident plane P and SV waves at ocean bottom and engineering characteristics of offshore ground motion records off the coast of southern California, USA. Earthq. Eng. Eng. Vib. 2014, 13, 181–194. [Google Scholar] [CrossRef]
- Li, C.; Hao, H.; Li, H.; Bi, K.; Chen, B. Modeling and Simulation of Spatially Correlated Ground Motions at Multiple Onshore and Offshore sites. J. Earthq. Eng. 2016, 12, 359–383. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Salyuk, A.; Yusupov, V.; Kosmach, D.; Gustafsson, Ö. Extensive methane venting to the atmosphere from sediments of the East Siberian Arctic Shelf. Science 2010, 327, 1246–1250. [Google Scholar] [CrossRef]
- Sapart, C.J.; Shakhova, N.; Semiletov, I.; Jansen, J.; Szidat, S.; Kosmach, D.; Dudarev, O.; van der Veen, C.; Egger, M.; Sergienko, V.; et al. The origin of methane in the East Siberian Arctic Shelf unraveled with triple isotope analysis. Biogeosciences 2017, 14, 2283–2292. [Google Scholar] [CrossRef]
- Steinbach, J.; Holmstrand, H.; Shcherbakova, K.; Kosmach, D.; Brüchert, V.; Shakhova, N.; Salyuk, A.; Sapart, C.J.; Chernykh, D.; Noormets, R.; et al. Source apportionment of methane escaping the subsea permafrost system in the outer Eurasian Arctic Shelf. Proc. Natl. Acad. Sci. USA 2021, 118, e2019672118. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | CME-4111 | CME-4311 |
|---|---|---|
| Type | No feedback | Vertical, with feedback, Horizontal, no feedback |
| Sensitivity | 4000 V/(m/s) | 2000 V/(m/s) |
| Type of output signal | analog, differential | analog, differential |
| Number of orthogonal components | 3 | 3 |
| Maximum output signal | ±20 V | ±10 V |
| Maximum input signal | ±5 mm/s | ±5 mm/s |
| Bandwidth | 0.0083 (120 s) to 50 Hz | 0.0167 (60 s) tp 50 Hz |
| Power supply voltage | 12 V DC (10.5–16 V acceptable) | 12 V DC (9.5–16 V acceptable) |
| Current consumption | 7 mA | 8.5 mA |
| Output impedance | 2 × 500 Ohm | 2 × 500 Ohm |
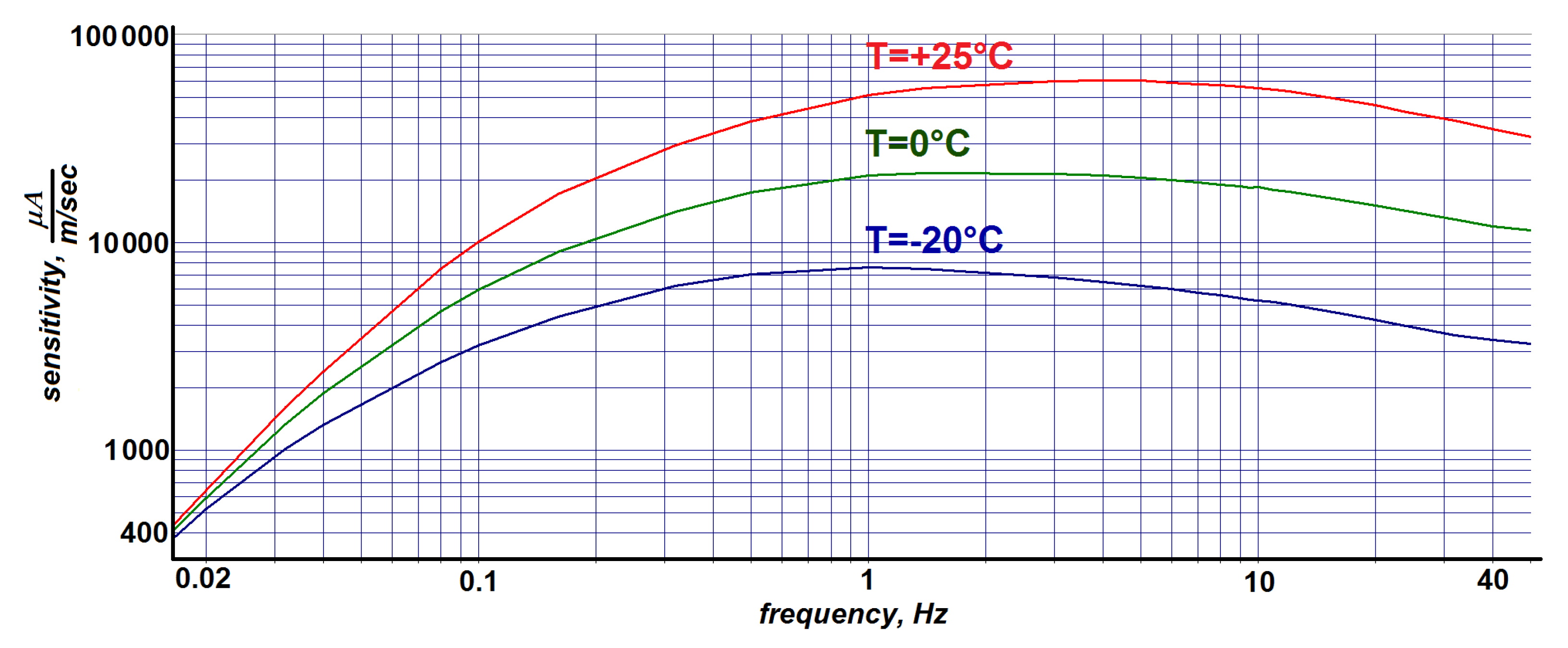
| Self-noise | see Figure 4 | see Figure 4 |
| Dynamic range at 1 Hz | 123.5 dB | 123.5 dB |
| Nonlinearity at 1 Hz | 0.5% | Vertical, 0.15% Horizontal, 0.5% |
| Maximum inclination during installation | ±15° | ±15° |
| Temperature range | −12–+55 °C | −12–+55 °C |
| Housing material | Stainless steel (optional) | Stainless steel (optional) |
| Housing dimensions, diameter/height | 146/90 mm | 146/90 mm |
| Weight | 3.1 kg | 2.6 kg |
| Connector type on the housing to connect the cable | IDCC-10MR (10 pin) | IDCC-10MR (10 pin) |
| Frequency Band | 0.04–2500 Hz |
| Sensitivity at 15 Hz | 7.2 ± 0.5 mV/Pa |
| Dynamic range | 100 dB |
| Sensor diameter | 50 mm |
| Maximum depth | up to 5000 m |
| A number of Analog Channels | 4 (Basic), 8 (Extended) |
| A number of digital channels | 1 (for reference to absolute time) |
| Sample rates, Hz | 20, 25, 40, 50, 80, 100, 160, 200, 400, 800 |
| Time synchronization | GPS interface |
| Temperature stability of the quartz generator | ±5 × 10−9 |
| Dynamic range | 85–90 dB |
| Memory | SD card up to 64 Gb |
| Power supply voltage | 6.5–32 V |
| Power consumption | 20 mA (12 V) |
| Frequency Band | 1–50 Hz |
| Sensitivity | 2000 V/(m/s) |
| Dynamic range at 1 Hz | 118 dB |
| Power supply voltage | 12V (10.5–16 V acceptable) |
| Current consumption | 25 mA |
| Temperature range | −12–+55 °C |
| Maximum inclination during installation | ±15° |
| Deep-Water Radio Transparent Instrument Case | Glass Sphere of 43 cm Diameter Inlaid with Durable Plastic Shell |
| Seismic recorder | 4 channels, 24-bit ADC for each channel |
| User interface/data backup link | Wireless USB. OS Windows client program for the device management |
| User terminal | Tablet, Laptop or Desktop PC |
| Seismic sensors | Molecular electronic sensors 3C, 0.0083 (120 s) to 50 Hz, one deep-water low-frequency hydrophone (0.067 Hz (15 s) to 30 kHz) |
| Release command | Acoustic call or automatically by preset time |
| Ballast anchor release | Electrochemical with mechanical support (salt and fresh waters) |
| Ballast anchor environmental feature | Self-dissolving into natural sea components after surveying (24 kg weight in air) or metallic |
| Continuous recording time | Up to 13 months (lithium batteries) |
| Battery type | 3.6 V Primary lithium-thionyl chloride (Li-SOCl2). High-energy D-size cell-type LS 33,600 and battery protection board |
| Detecting equipment on the sea surface | Radio beacon with GPS coordinates transmission, flash light (at night), flag |
| Weight | 38 kg in air (without anchor) |
| Depth range | up to 6000 m |
| Sensitivity with Preamplifier | 200 V/bar |
| Frequency range | From 0.067 Hz (15 s) to 30 kHz |
| Self-noise to input | Mean square noise in a range of 1 Hz to 1 kHz, 0.06 μBar |
| Maximal operation depth | 6000 m |
| Physical size | 4.2 cm long and 4.0 cm in diameter |
| A Number of Input of Differential Channels | 4 |
| Supported data sampling | 0.25, 0.5, 1, 2, 4 ms |
| Dynamic Range | 153 dB |
| Time synchronization | Built-in GPS/GLONASS navigation receiver, powered off during recording |
| Temperature stability of the quartz generator | ± 5 × 10−9 |
| Memory | SD flash card of 32 Gb (expandable up to 128 Gb) |
| Power supply voltage | 8.5–20 V |
| Main user interface | Wireless USB (non-active during data acquisition) |
| Temperature Measurement | 2 Temperature Sensors |
| Current measurement | AD8218 sensor |
| Compass | LSM 303DLHC (3D accelerometer) |
| Pressure | BMP180 (Digital Pressure sensor) |
| Wireless USB dongle for communication | Alerion Wireless USB |
| Magnetic switch on|off of the OBS | Gerkon KЭM-2A |
| GPS|GLONASS receiver | Trimble Silvana or uBlox UC530M |
| Site | Type | Latitude | Longitude | Depth | Operation Period |
|---|---|---|---|---|---|
| St4 | MPSSR | 75.422° N | 127.391° E | 42 m | 6 Oct 2018 to 8 Feb 2019 |
| St5 | MPSSR | 75.431° N | 129.132° E | 40 m | 6 Oct 2018 to 8 Mar 2019 |
| Slope | GNS-C | 77.308° N | 120.610° E | 350 m | 15 Oct 2018 to 31 May 2019 |
| St3 | MPSSR | 76.392° N | 125.660° E | 51 m | 9 Oct 2019 to 5 Jan 2020 |
| Typ2 | Typhoon | 76.834° N | 127.688° E | 61 m | 10 Oct 2019 to 9 Feb 2020 |
| Time, UTC | M | Latitude | Longitude | Depth, km | Distance, ° | Region | |
|---|---|---|---|---|---|---|---|
| St4 | St5 | ||||||
| 2018-11-18 20:25:46.590 | 6.8 | −17.87 | −178.93 | 540 | 99.0 | 98.6 | Fiji |
| 2018-11-25 16:37:32.830 | 6.3 | 34.36 | 45.74 | 18 | 54.8 | 55.3 | Iran |
| 2018-11-30 17:29:29.330 | 7.1 | 61.35 | −149.96 | 46.7 | 30.2 | 29.7 | Alaska |
| 2018-12-01 13:27:21.080 | 6.4 | −7.38 | 128.71 | 136 | 82.9 | 82.9 | Indonesia |
| 2018-12-05 04:18:08.420 | 7.5 | −21.95 | 169.43 | 10 | 100.9 | 100.6 | New Caledonia |
| 2018-12-20 17:01:55.150 | 7.3 | 55.10 | 164.70 | 16.56 | 24.7 | 24.4 | Russia |
| 2019-01-05 18:47:11.740 | 5.9 | 51.33 | −178.12 | 30 | 32.1 | 31.7 | Alaska |
| 2019-01-06 17:27:18.980 | 6.6 | 2.26 | 126.76 | 43.21 | 73.2 | 73.2 | Indonesia |
| 2019-01-08 12:39:30.950 | 6.3 | 30.59 | 131.04 | 35 | 44.9 | 44.9 | Japan |
| 2019-01-15 18:06:34.300 | 6.6 | −13.34 | 166.88 | 35 | 92.0 | 91.7 | Vanuatu |
| 2019-01-22 05:10:03.480 | 6.3 | −10.41 | 119.02 | 24 | 86.0 | 86.1 | Prince Edward Islands region |
| 2019-02-01 16:14:12.329 | 6.7 | 14.68 | −92.45 | 66 | 86.7 | 86.4 | Mexico |
| 2019-02-02 09:27:36.030 | 6 | −2.85 | 100.07 | 20 | 79.9 | 80.2 | Indonesia |
| Time, UTC | M | Latitude | Longitude | Depth, km | Distance, ° | Region | |
|---|---|---|---|---|---|---|---|
| St3 | Typ2 | ||||||
| 2019-11-20 08:26:08.017 | 6.3 | 53.13 | 153.68 | 496 | 25.6 | 25.6 | Russia |
| 2019-11-20 23:50:43.955 | 6.2 | 19.45 | 101.36 | 10 | 58.3 | 58.9 | Thailand |
| 2019-11-24 00:54:01.053 | 6.3 | 51.38 | −175.51 | 20 | 33.3 | 33.0 | Alaska |
| 2019-11-23 12:11:15.564 | 6.2 | 1.64 | 132.81 | 5 | 74.9 | 75.2 | Indonesia |
| 2019-11-26 02:54:12.872 | 6.4 | 41.51 | 19.53 | 22 | 53.5 | 53.7 | Mamurras |
| 2019-12-02 05:01:54.821 | 6 | 51.19 | −178.10 | 28 | 32.9 | 32.6 | Amatignak |
| 2019-12-15 06:11:51.155 | 6.8 | 6.70 | 125.17 | 18 | 69.7 | 70.1 | Philippines |
| 2019-12-20 11:39:52.874 | 6.1 | 36.54 | 70.46 | 212 | 46.6 | 47.3 | Afghanistan |
| 2019-12-23 20:56:23.555 | 6 | 50.52 | −129.76 | 10 | 44.6 | 43.9 | Canada |
| 2019-12-23 19:49:43.086 | 6 | 50.61 | −129.94 | 10 | 44.4 | 43.8 | Canada |
| 2019-12-23 19:13:25.075 | 5.7 | 50.54 | −129.83 | 10 | 44.5 | 43.9 | Canada |
| 2019-12-25 03:36:01.626 | 6.3 | 50.61 | −129.96 | 6.58 | 44.4 | 43.8 | Canada |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krylov, A.A.; Egorov, I.V.; Kovachev, S.A.; Ilinskiy, D.A.; Ganzha, O.Y.; Timashkevich, G.K.; Roginskiy, K.A.; Kulikov, M.E.; Novikov, M.A.; Ivanov, V.N.; et al. Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic. Sensors 2021, 21, 3979. https://doi.org/10.3390/s21123979
Krylov AA, Egorov IV, Kovachev SA, Ilinskiy DA, Ganzha OY, Timashkevich GK, Roginskiy KA, Kulikov ME, Novikov MA, Ivanov VN, et al. Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic. Sensors. 2021; 21(12):3979. https://doi.org/10.3390/s21123979
Chicago/Turabian StyleKrylov, Artem A., Ivan V. Egorov, Sergey A. Kovachev, Dmitry A. Ilinskiy, Oleg Yu. Ganzha, Georgy K. Timashkevich, Konstantin A. Roginskiy, Mikhail E. Kulikov, Mikhail A. Novikov, Vladimir N. Ivanov, and et al. 2021. "Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic" Sensors 21, no. 12: 3979. https://doi.org/10.3390/s21123979
APA StyleKrylov, A. A., Egorov, I. V., Kovachev, S. A., Ilinskiy, D. A., Ganzha, O. Y., Timashkevich, G. K., Roginskiy, K. A., Kulikov, M. E., Novikov, M. A., Ivanov, V. N., Radiuk, E. A., Rukavishnikova, D. D., Neeshpapa, A. V., Velichko, G. O., Lobkovsky, L. I., Medvedev, I. P., & Semiletov, I. P. (2021). Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic. Sensors, 21(12), 3979. https://doi.org/10.3390/s21123979