
Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research

 , , ,
, , ,
Abstract
1. Introduction
2. State of Art in PM-LCS Correction Procedures
2.1. Principle Measurement Techniques for PM
2.2. Literature Review on PM-LCS Calibration Studies
2.3. Interviews on Usage and Calibration of LCS
- Expert interviews show a lack of uniformity in the testing of sensors. New guidelines are needed to make sensor testing procedures binding and comparable;
- When using sensors, it is important to be clear about what they are to be used for. If the aim is to increase the environmental awareness of citizens or to test the air quality (low pollution, high pollution) in a location, the quality of the data is sufficient. Currently, the raw data of the sensors are not suitable for quantitative measurements due to their poor reproducibility and stability characteristics;
- Many research groups have used the sensors without calibration. The number of calibrations required during a measurement campaign is still unclear. Most research groups carry out the calibrations in comparative measurements with standard measuring instruments at the beginning, when the measurement campaign is short, and additionally at the end in longer measurement campaigns;
- The data sheets provided by the manufacturers are partly insufficient. Therefore, calibrations by the user are essential. In addition, each sensor must be calibrated separately, since the characteristics of the sensors are individual even with sensors of the same type;
- A big issue is that LCS are operated outside their specifications. Almost all require a non-condensing environment. LCS are mostly sensors developed for indoor use. In many cases these sensors are used for outdoor measurements, thus failing to provide useable data;
- Single laboratory or co-location experiments are insufficient to determine the measured values and characteristics of the sensors. If the sensors are to be used for mobile measurements, stationary calibrations are insufficient. Furthermore, the age-related drift of the sensors must be taken into account. The service life of the sensors is usually less than specified by the manufacturer;
- A common platform for users of low-cost sensors for communication and exchange of information and ideas is indispensable. The circle of users of such low-cost sensors is constantly growing in private and commercial applications as well as in science without proper assurance of quality and information regarding visualization and interpretation of such measurements;
- Nevertheless, citizen scientists and the general public should be encouraged and guided to work with LCS and the data acquired through them.
3. The URBMOBI 3.0 System for Mobile PM Measurements
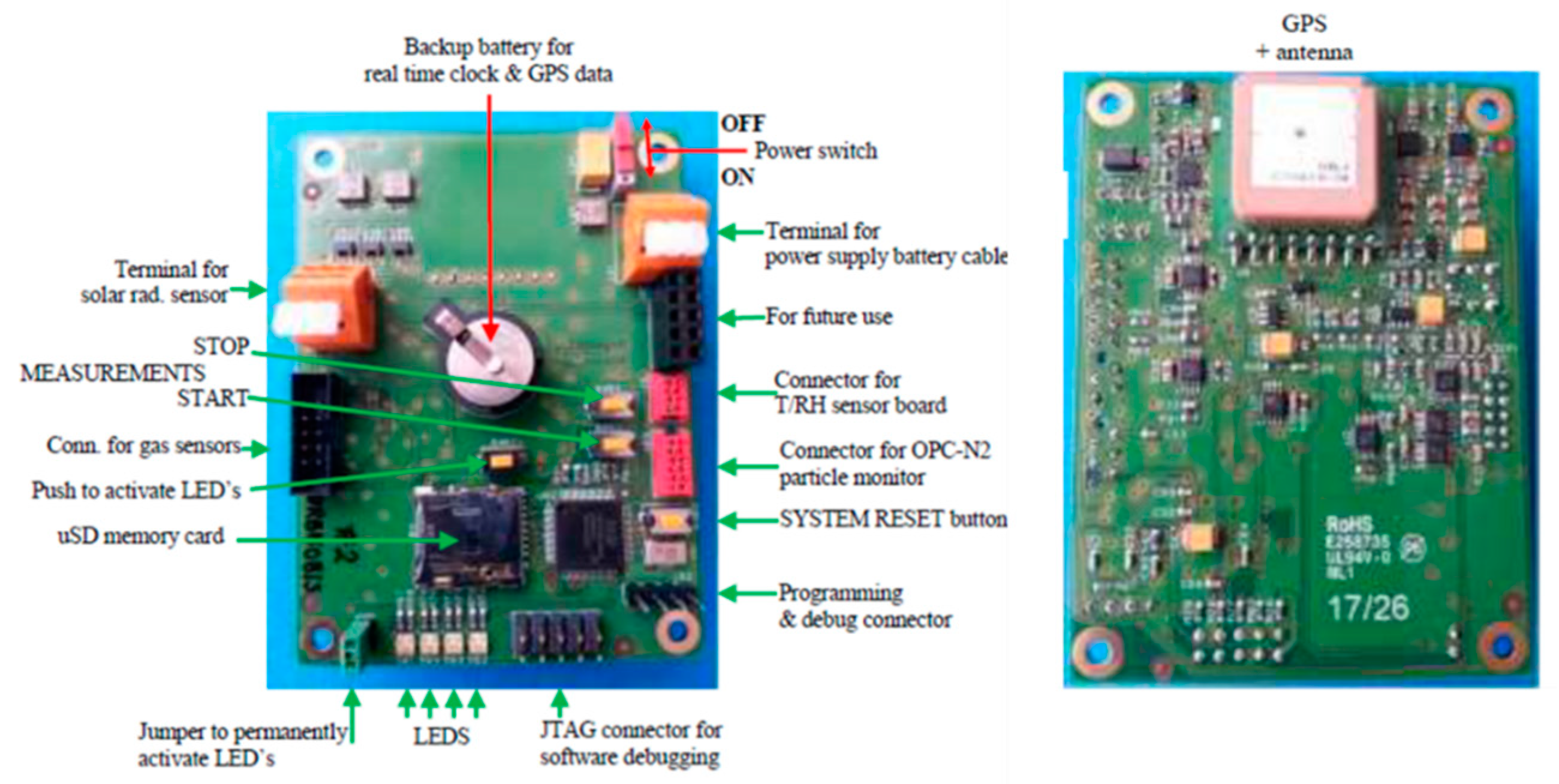
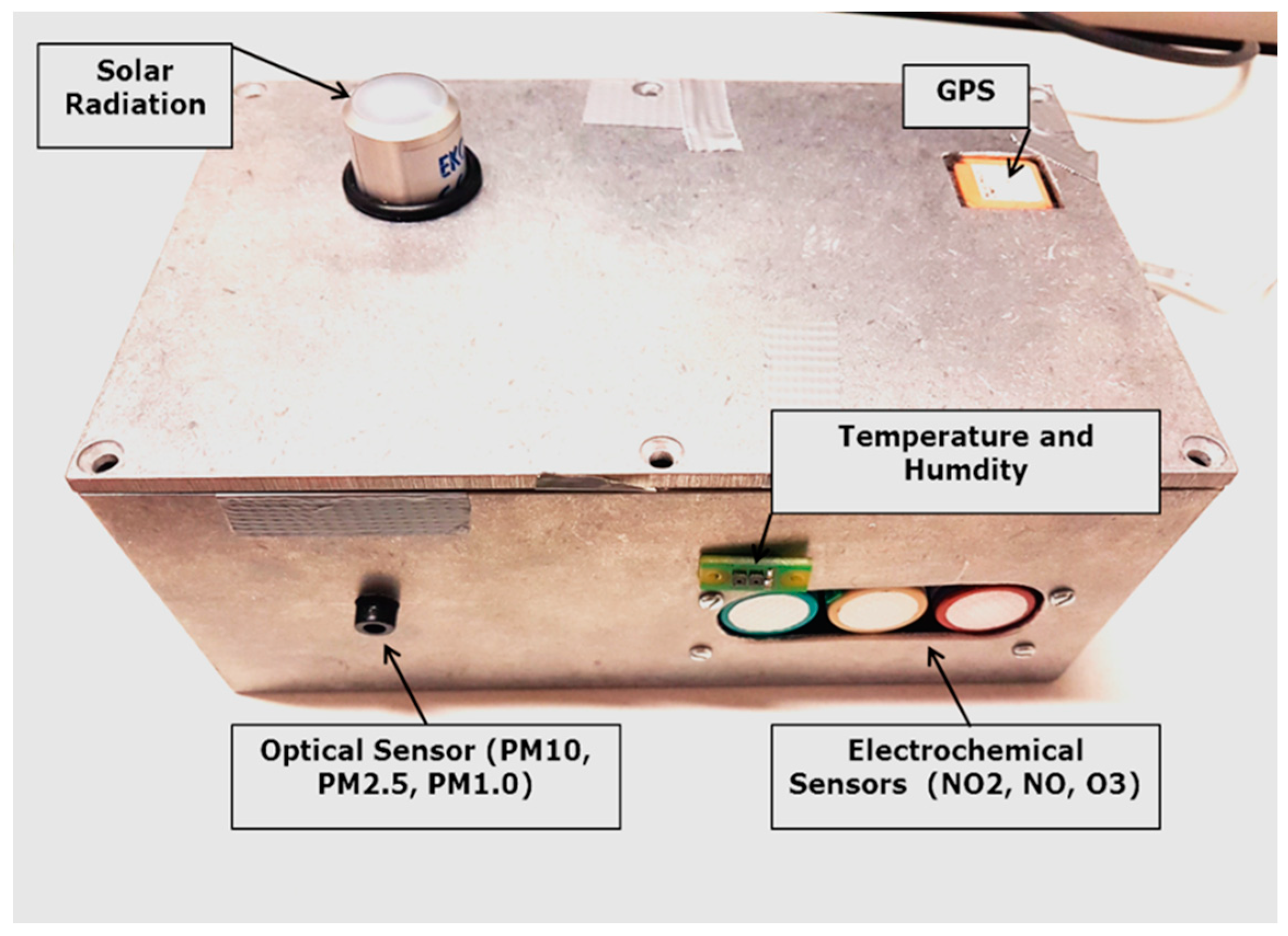
3.1. Device Configuration of the URBMOBI 3.0 System
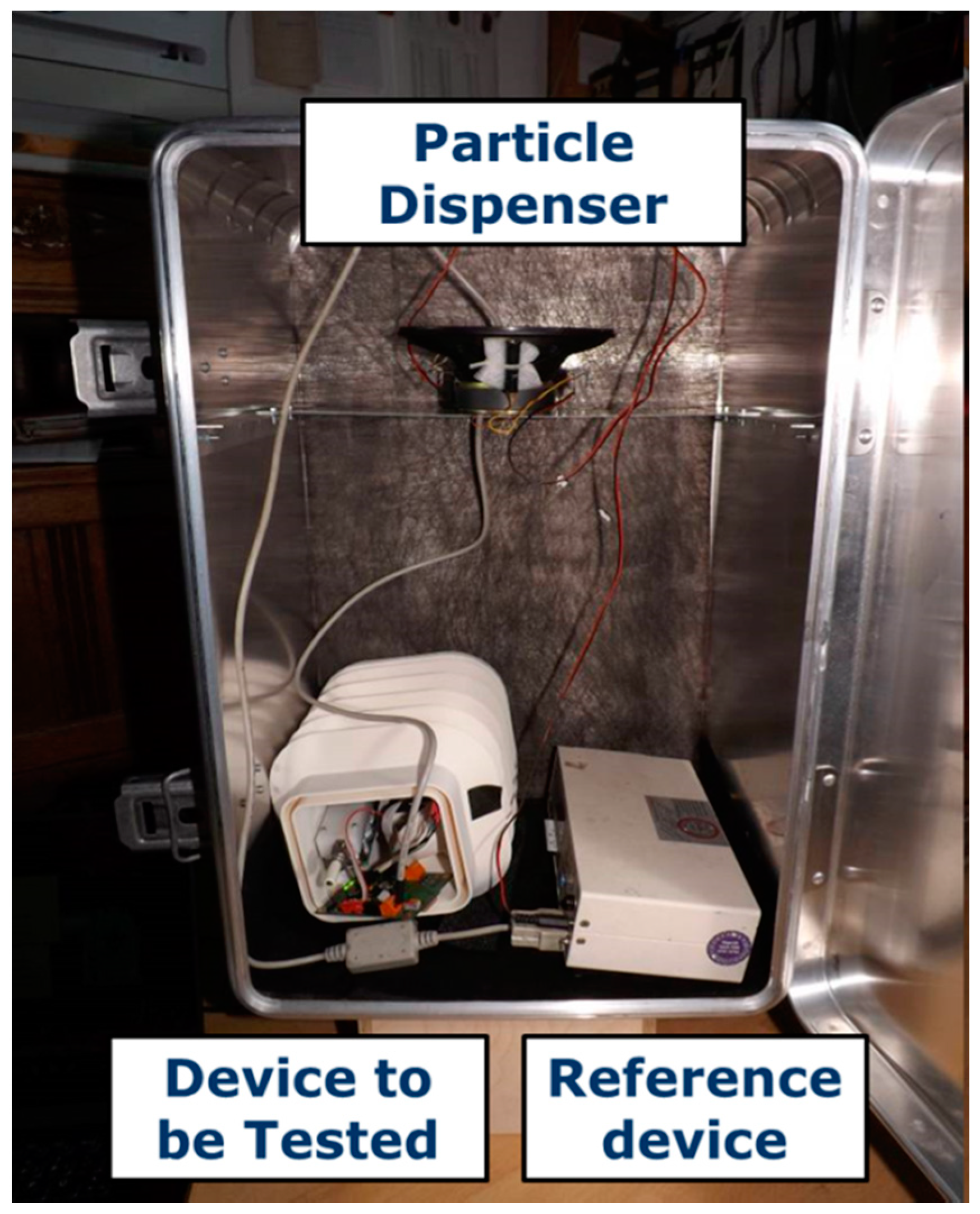
3.2. Calibration of the URBMOBI 3.0 System in a Stationary Setup
3.3. Calibration of the URBMOBI 3.0 in a Mobile Setup
- The data sets were checked for outliers and inconsistencies due to manual or electrical errors. The first and the last 1% quantile of the URBMOBI 3.0 data are considered as outliers and removed.
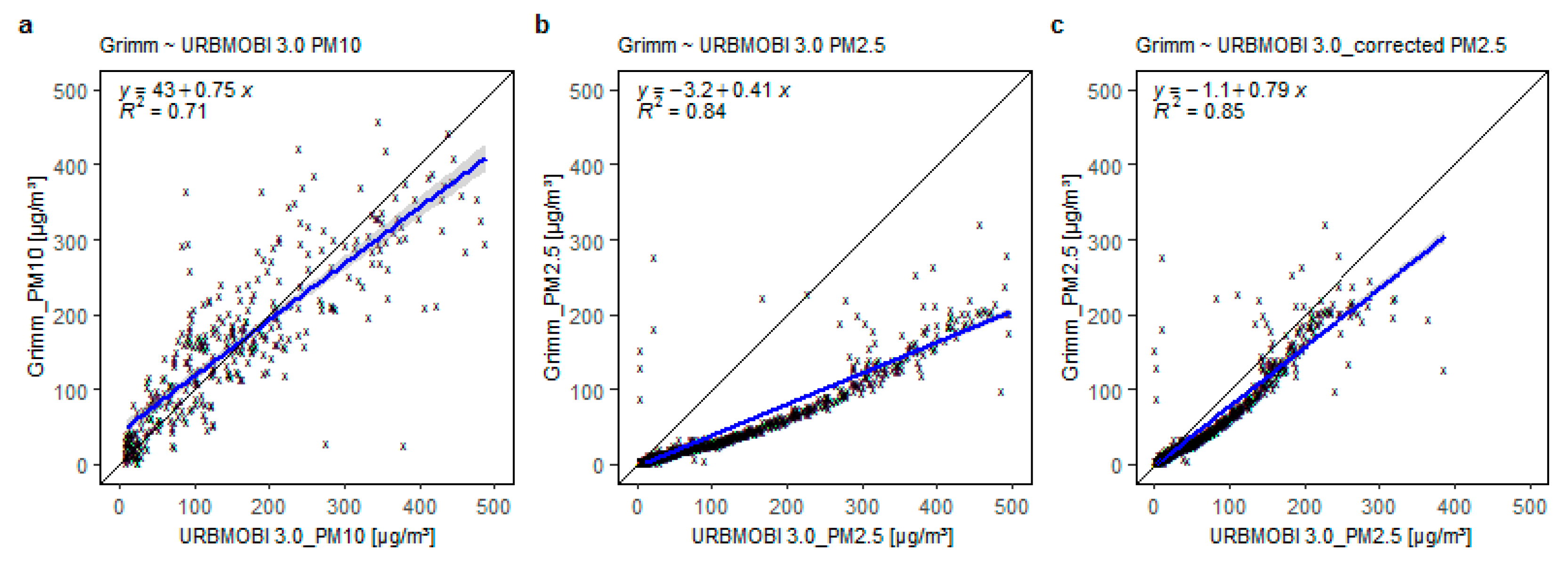
- Low performance of LCS due to RH is an issue repeatedly discussed in different studies on LCS. To compensate for the effect of aerosol hygroscopicity, the method described by Crilley et al. (2018) [50] wherein a correction factor “C”, derived based on the Köhler’s theory [51], is used. Crilley et al. (2018) [50] state that for a situation with RH < 60% a calibration against suitable reference instruments is sufficient. In the experiments we conducted, RH ranged from 50% to 85%. Therefore, it was decided to use the correction factor based on Köhler’s theory for the entire dataset. The value of ĸ is assumed to be 0.4 since the measurements were carried out in an urban area similar to that of the study conducted in Crilley et al. (2020) [54]. The URBMOBI 3.0 data is corrected for relative humidity using the following Equations (3) and (4).where, is the measured relative humidity over 100, ĸ is equal to 0.4, and density of particle () is set to 1.65 g/mL. The C-factor is then applied to the measurement data using:
- The difference between the medians of the URBMOBI 3.0 (Uc) data set corrected for the influence of humidity and the Grimm 1.109 (G) data set is subtracted from the URBMOBI 3.0 to bring the measurements into the same range as the Grimm 1.109 data and then labeled with the subscript “s”.
- Two models, linear regression (lm) and quantile mapping (qm) are tested for calibration. Each model uses two approaches. The first approach uses 100% of the Grimm 1.109 concurrent dataset to calibrate the URBMOBI 3.0 data (G~Uc). The second approach limits the derivation of calibration parameters to 20% of the common data, 10% at the beginning and 10% at the end, to check whether the statistical quantities found in this way can be used to reliably adjust the 80% original data during the mobile measurement without parallel reference.
- As an additional step, outliers that might have been missed in step “1” are identified after step “4” as outliers in a boxplot. These values are removed and the Grimm 1.109 and URBMOBI 3.0 (RH-corrected) is correlated again (G~Wo).
- The accuracy of the corrected URBMOBI 3.0 data (Uc) is checked. Accuracy (A) in this case is the percentage of data points that are within ±10% of the Grimm 1.109 data point at the same measurement time after calibration.
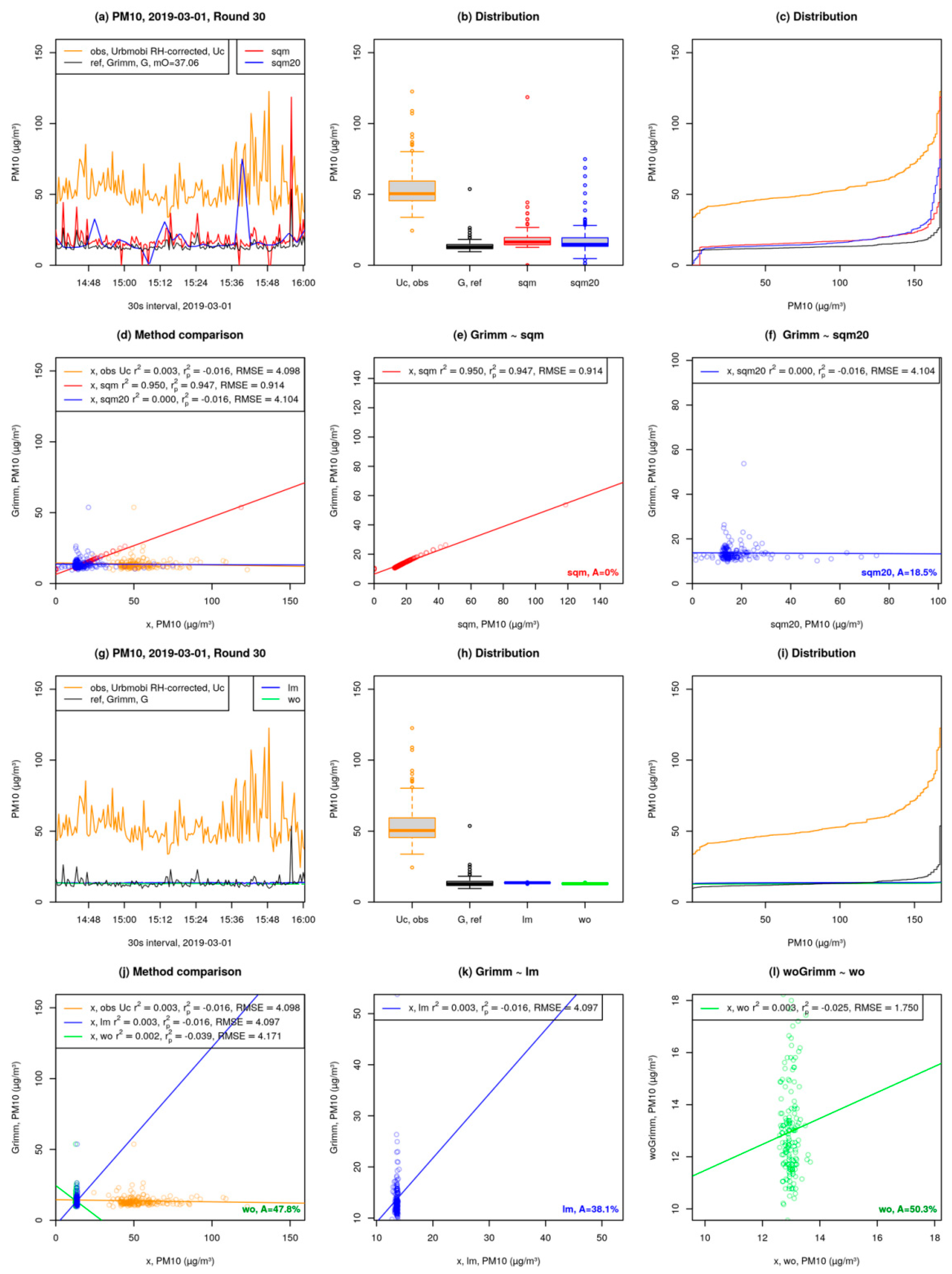
- Time series in 30 s interval (preprocessed): Observation (obs), is the URBMOBI 3.0 (U) data (shown in dark orange). Reference (ref) is the Grimm data (shown in black). “mO” denotes the offset between the median of Grimm and URBMOBI 3.0. “sqm” is the corrected URBMOBI 3.0 time series after applying the median offset and before quantile mapping (shown in red). “sqm20” is the same as sqm but using only 20% of the Grimm device data (first and last 10%; this procedure reduces the time resolution; shown in blue) (Figure 7a).
- Comparison of methods used for URBMOBI 3.0 correction shown in Figure 7a, including a regression line based on simple linear regression. “obs” refers to the correlation between original URBMOBI 3.0 and Grimm data. “sqm” is the correlation between corrected URBMOBI 3.0 data using median offset before quantile mapping and the Grimm data (shown in dark orange). “sqm20” is same as sqm but with 20% of the Grimm data (first and last 10%; fewer data points) as reference. is the correlation coefficient of the correlation between Grimm and the corrected URBMOBI 3.0 data. denotes predicted based on the same data (Figure 7d).
- Correlation between sqm20 and Grimm (same as sqm in d) (Figure 7f).
- Time series in preprocessed 30s interval: Observations (obs, URBMOBI 3.0) are shown in dark orange. Reference (ref, Grimm) is shown in black. “lm” refers to the corrected URBMOBI 3.0 data based on multi-linear regression (lm(G~U + RH + T)) wherein the intercepts and coefficients are gathered using a 5-min mean of URBMOBI 3.0 and Grimm data. Intercepts and coefficients are applied to the original URBMOBI 3.0 in the 30 s interval are shown in blue. For URBMOBI 3.0 data that was already RH-corrected with the C-factor RH was not considered for the multi-linear regression. “wo” is the same as lm, but with the outliers removed before calculating the intercepts and coefficients over a 5-min mean of both URMOBI 3.0 and Grimm data. Outliers are based on 30 s interval data: >1.5·Inter quartile range (IQR) as shown in light green (Figure 7g).
- Comparison of methods used for URBMOBI 3.0 correction shown in Figure 7g including a regression line based on simple linear regression: obs–correlation between URBMOBI 3.0 and Grimm data (shown in dark orange); lm–correlation between Grimm and corrected URBMOBI 3.0 based on 5-min means and Grimm data (shown in blue); wo–correlation between Grimm and corrected URBMOBI 3.0 data without outliers (shown in green). For a description of r2 and RMSE see Figure 7d with x as either obs, lm, or wo. and are not the correlation coefficients of the multi-linear model which was used for corrections). The accuracy (A) for correction without outliers was calculated using the same method as described for Figure 7e (Figure 7j).
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Organisation | City, Country | Project | Sensor |
|---|---|---|---|---|
| Saúl García | Instituto de Salud Carlos III | Madrid, Spain | ICARUS | Uhoo, ioTech-portable PM sensor |
| David Kocman | Department of Environmental Sciences, Institut “Jozes Stefan” | Ljubljana, Slovenia | ICARUS | Uhoo, ioTech-portable PM sensor |
| Ondřej Mikeš | RECETOX, Masaryk University | Brno, Czech Republic | ICARUS | Uhoo, ioTech-portable PM sensor |
| Bernd Laquai | University of Stuttgart | Stuttgart, Germany | Feasibility study, for the use of sensors in the context of an epidemiological study. | Sensors from Alphasense Ltd., SDS011 |
| Andreas Madsasck | Ok Lab | Stuttgart, Germany | SENSOR.COMMUNITY | SDS011 |
| Núria Castell | Norwegian Institute for Air Research (NILU) | Oslo, Norway | iFLINK European Citizen Science Association Working Group | Alphasense Ltd., SDS011 |
| Robert Heinecke | Breeze Technology | Hamburg, Germany | The state of Hennef, The state of Moers, and own Projects | Purchased from different companies |
| Hester Volten | National Institute for Public Health and the Environment, Ministry of Health, Welfare and Sport. | Netherlands | Multiple Citizen Science Projects | SDS011, Alphasense Ltd. |
| Helge Simon & Lorenz Harr | Johannes Gutenberg–Universität Mainz | Mainz, Germany | Own Project | Alphasense Ltd. |
| Michel Gerboles & Annette Borowiak | European Commission Joint Research Centre | Ispra, Italy | AirSensEUR, AQUILA | Different sensor boxes |
| Christof Asbach | Institut für Energie and Umwelttechnik (IUTA) e.V. | Duisburg, Germany | Own Project | SDS011, sensors from Alphasense Ltd. |
| Dieter Klemp & Robert Wagner | Forschungszentrums Jülich | Juelich, Germany | Sensoren zur Messung von Aerosolen and reaktiven Gasen and Analyse ihrer Auswirkung auf die Gesandheit (SMARAGD) | SDS011, Alphasense Ltd. (NO2-B43F, NO-B4, OX-B431, CO-B4) |
| Anke Lükewille | European Environmental Agency (EEA) | Copenhagen, Denmark | EEA report on Assessing air quality through citizen science | |
| Panagiota Syropoulou | DRAXIS, hackAIR | Greece | hackAIR | Air quality awareness project that eventually leads to the use of SDS011. |
| Erika von Schneidemesser | Institute for Advanced Sustainability Studies (IASS) | Potsdam, Germany | Urban Climate Under Change [UC]² | Earth Sense (Zephyr) |
| Andreas Phillip | Universität Augsburg | Augsburg, Germany | Smart AQnet | SDS011, Alphasense Ltd. |
| Alberto Gotti | EUCENTRE, Department of Risk Scenarios | Pavia, Italy | ICARUS | Uhoo, ioTech-portable PM sensor |
| Danielle Vienneau | Swiss TPH | Basel, Switzerland | ICARUS | Uhoo, ioTech-portable PM sensor |
| Markus Pesch | Grimm Aerosol Technik GmbH | Muldestausee, Germany | Smart AQnet | Alphasense OPC N3 |
| Stefan Hogekamp | PALAS | Karlsruhe, Germany | Own Project | Own technology |
| M. M. Prada | Bosch | Renningen, Germany | Own Project | Different sensors |
References
- Mehta, A.J.; Zanobetti, A.; Koutrakis, P.; Mittleman, M.A.; Sparrow, D.; Vokonas, P.; Schwartz, J. Associations between Short-term Changes in Air Pollution and Correlates of Arterial Stiffness: The Veterans Affairs Normative Aging Study, 2007–2011. Am. J. Epidemiol. 2013, 179, 192–199. [Google Scholar] [CrossRef]
- Hemmingsen, J.G.; Rissler, J.; Lykkesfeldt, J.; Sallsten, G.; Kristiansen, J.; Møller, P.; Loft, S. Controlled exposure to particulate matter from urban street air is associated with decreased vasodilation and heart rate variability in overweight and older adults. Part. Fibre Toxicol. 2015, 12. [Google Scholar] [CrossRef]
- Lee, B.-J.; Kim, B.; Lee, K. Air Pollution Exposure and Cardiovascular Disease. Toxicol. Res. 2014, 30, 71–75. [Google Scholar] [CrossRef] [PubMed]
- Münzel, T.; Gori, T.; Al-Kindi, S.; Deanfield, J.; Lelieveld, J.; Daiber, A.; Rajagopalan, S. Effects of gaseous and solid constituents of air pollution on endothelial function. Eur. Heart J. 2018, 39, 3543–3550. [Google Scholar] [CrossRef]
- Weichenthal, S. Selected physiological effects of ultrafine particles in acute cardiovascular morbidity. Environ. Res. 2012, 115, 26–36. [Google Scholar] [CrossRef] [PubMed]
- United Nations. Transforming Our World: The 2030 Agenda for Sustainable Development Goals. Available online: https://sustainabledevelopment.un.org/post2015/transformingourworld (accessed on 29 January 2020).
- World Health Organisation. Outdoor Air Pollution a Leading Environmental Cause of Cancer Deaths. Available online: http://www.euro.who.int/en/health-topics/environment-and-health/urban-health/news/news/2013/10/outdoor-air-pollution-a-leading-environmental-cause-of-cancer-deaths (accessed on 29 January 2020).
- Lukeville, A. Assessing Air Quality through Citizen Science; Publications Office of the European Union: Luxembourg, 2019; ISBN 1977-B449. [Google Scholar]
- Federal Ministry of Justice and Consumer Protection, Germany. Neununddreißigste Verordnung zur Durchführung des Bundes-Immissionsschutzgesetzes (Verordnung über Luftqualitätsstandards und Emissionshöchstmengen—39. BImSchV) Anlage 5 (zu den §§ 14 und 15) Kriterien für die Festlegung der Mindestzahl der Probenahmestellen für ortsfeste Messungen der Werte für Schwefeldioxid, Stickstoffdioxid und Stickstoffoxide, Partikel (PM10, PM2,5), Blei, Benzol und Kohlenmonoxid in der Luft. In Anlage 5 39. BimSchV—Einzelnorm; 2010. Available online: https://www.gesetze-im-internet.de/bimschv_39/anlage_5.html (accessed on 8 February 2020).
- Federal Ministry of Justice and Consumer Protection, Germany. Neununddreißigste Verordnung zur Durchführung des Bundes-Immissionsschutzgesetzes (Verordnung über Luftqualitätsstandards und Emissionshöchstmengen—39. BImSchV) Anlage 6 (zu den §§ 1, 16 und 19) Referenzmethoden für die Beurteilung der Konzentrationen von Schwefeldioxid, Stickstoffdioxid und Stickstoffoxiden, Partikeln (PM10 und PM2,5), Blei, Benzol, Kohlenmonoxid und Ozon. In Anlage 6 39. BimSchV—Einzelnorm; 2010. Available online: https://www.gesetze-im-internet.de/bimschv_39/anlage_6.html (accessed on 8 February 2020).
- Adamiec, E.; Dajda, J.; Gruszecka-Kosowska, A.; Helios-Rybicka, E.; Kisiel-Dorohinicki, M.; Klimek, R.; Pałka, D.; Wąs, J. Using Medium-Cost Sensors to Estimate Air Quality in Remote Locations. Case Study of Niedzica, Southern Poland. Atmosphere 2019, 10, 393. [Google Scholar] [CrossRef]
- Wesseling, J.; de Ruiter, H.; Blokhuis, C.; Drukker, D.; Weijers, E.; Volten, H.; Vonk, J.; Gast, L.; Voogt, M.; Zandveld, P.; et al. Development and Implementation of a Platform for Public Information on Air Quality, Sensor Measurements, and Citizen Science. Atmosphere 2019, 10, 445. [Google Scholar] [CrossRef]
- PurpleAir. PurpleAir|Real Time Air Quality Monitoring. Available online: https://www2.purpleair.com/ (accessed on 1 February 2021).
- Johnson, K.; Holder, A.; Frederick, S.; Clements, A. PurpleAir PM2.5 U.S. Correction and Performance during Smoke Events 4/2020. In Proceedings of the International Smoke Symposium, Raleigh, NC, USA, 20–24 April 2020. [Google Scholar]
- Breeze Technologies. Hochlokale Luftqualitätsdaten für eine lebenswertere Umwelt: Breeze Technologies. Available online: https://www.breeze-technologies.de/de/ (accessed on 18 February 2021).
- United States Environmental Protection Agency. Performance Evaluation of Low-Cost Air Quality Sensors|US EPA. Available online: https://www.epa.gov/research-fellowships/performance-evaluation-low-cost-air-quality-sensors (accessed on 8 February 2020).
- United States Environmental Protection Agency. DRAFT Roadmap for Next Generation Air Monitoring. 2013. Available online: https://www.epa.gov/sites/production/files/2014–09/documents/roadmap-20130308.pdf (accessed on 8 February 2020).
- Gerboles, M.; Spinelle, L.; Signorini, M. AirSensEUR: An Open Data/Software/Hardware Multi-Sensor Platform for Air Quality Monitoring. Part A: Sensor Shield; Publications Office of the European Union: Luxembourg, 2015; Available online: https://publications.jrc.ec.europa.eu/repository/handle/JRC97581 (accessed on 15 March 2019).
- European Commission; DRAXIS. hackAIR. Available online: https://www.hackair.eu/ (accessed on 10 February 2020).
- Draxis Environmental SA. Emission: Integrated Platform for the More Efficient Monitoring of Air Pollution with the Use of IoT Network. Available online: https://draxis.gr/projects/emission (accessed on 10 February 2020).
- Rai, C.A.; Kumar, P.; Pilla, F.; Skouloudis, A.; Camprodon, G. Summary of Air Quality Sensors and Recommendations for Application. iSCAPE—Improving the Smart Control of Air Pollution in Europe. 2016. Available online: https://www.iscapeproject.eu/wp-content/uploads/2018/12/Resubmitted-D1.5-Summary-of-air-quality-sensors-and-recommendations-for-application.pdf (accessed on 2 June 2021).
- Rai, C.A.; Kumar, P.; Pilla, F. Summary of Air Quality Sensors and Recommendations for Application. 2017. Available online: https://www.iscapeproject.eu/wp-content/uploads/2017/09/iSCAPE_D1.5_Summary-of-air-quality-sensors-and-recommendations-for-application.pdf (accessed on 2 June 2021).
- Karagulian, F.; Barbiere, M.; Kotsev, A.; Spinelle, L.; Gerboles, M.; Lagler, F.; Redon, N.; Crunaire, S.; Borowiak, A. Review of the Performance of Low-Cost Sensors for Air Quality Monitoring. Atmosphere 2019, 10, 506. [Google Scholar] [CrossRef]
- senseBox. Available online: https://sensebox.de/en/ (accessed on 18 February 2021).
- Air Quality Monitoring Open Framework—AirSensEUR. Available online: https://airsenseur.org/website/airsenseur-air-quality-monitoring-open-framework/ (accessed on 18 February 2021).
- Schuetze, A.; Hertel, O.; Karatzas, K.; Tiebe, C.; Conrad, T.; Gerboles, M. Workshop: Setting Standards for Low-Cost Air Quality Sensors, 11 April 2019, Berlin—LMT. Available online: https://www.lmt.uni-saarland.de/index.php/de/aktuelles/43-aktuelles-weiterbildung/1245-setting-standards (accessed on 24 December 2020).
- Gerboles, M. The Road to Developing Performance Standards for Low Cost Sensors in Europe. Available online: https://www.epa.gov/sites/production/files/2020–02/documents/session_01_b_gerboles.pdf (accessed on 23 August 2019).
- European Commission. Measuring Air Pollution with Low-Cost Sensors: Thoughts on the Quality of Data Measured by Sensors. 2017. Available online: https://ec.europa.eu/environment/air/pdf/Brochure%20lower-cost%20sensors.pdf (accessed on 2 June 2021).
- Spinelle, L.; Gerboles, M.; Villani, M.G.; Aleixandre, M.; Bonavitacola, F. Field calibration of a cluster of low-cost available sensors for air quality monitoring. Part A: Ozone and nitrogen dioxide. Sens. Actuators B Chem. 2015, 215, 249–257. [Google Scholar] [CrossRef]
- Johnson, N.E.; Bonczak, B.; Kontokosta, C.E. Using a gradient boosting model to improve the performance of low-cost aerosol monitors in a dense, heterogeneous urban environment. Atmos. Environ. 2018, 184, 9–16. [Google Scholar] [CrossRef]
- de Vito, S.; Esposito, E.; Castell, N.; Schneider, P.; Bartonova, A. On the robustness of field calibration for smart air quality monitors. Sens. Actuators B Chem. 2020, 310, 127869. [Google Scholar] [CrossRef]
- Kuula, J. Opportunities and Limitations of Aerosol Sensors to Urban Air Quality Monitoring. Ph.D. Thesis, Finnish Meteorological Institute, Helsinki, Finland, 2020. ISBN 9789523361171. [Google Scholar]
- Kuula, J.; Mäkelä, T.; Aurela, M.; Teinilä, K.; Varjonen, S.; González, Ó.; Timonen, H. Laboratory evaluation of particle-size selectivity of optical low-cost particulate matter sensors. Atmos. Meas. Tech. 2020, 13, 2413–2423. [Google Scholar] [CrossRef]
- Baumbach, G. Air Quality Control; Springer: Berlin/Heidelberg, Germany, 1996; ISBN 978–3–642–79003–4. [Google Scholar]
- Emeis, S. Measurement Methods in Atmospheric Sciences: In Situ and Remote; Borntraeger: Stuttgart, Germany, 2010; ISBN 9783443010669. [Google Scholar]
- Chemistry Dictionary. Beer-Lambert Law|History, Definition & Example Calculation. Available online: https://chemdictionary.org/beer-lambert-law/ (accessed on 1 February 2021).
- Grimm Aerosol Technik GmbH. Portable Laser Aerosol Spectrometer and Dust Monitor_Model_1108–1109. Available online: http://www.wmo-gaw-wcc-aerosol-physics.org/files/opc-grimm-model--1.108-and-1.109.pdf (accessed on 13 June 2016).
- Alphasense OPC-N2. Available online: https://www.manualslib.com/manual/1540841/Alphasense-Opc-N2.html (accessed on 5 August 2017).
- Nova Fitness Co., Ltd. SDS011 Laser PM2.5 Sensor Specification. Available online: http://www.inovafitness.com/en/a/chanpinzhongxin/95.html (accessed on 2 June 2021).
- Sensiron. Sensors Specification Statement: How to Understand Specifications of Sensiron Particulate Matter Sensors. Available online: https://www.sensirion.com/en/download-center/particulate-matter-sensors-pm/particulate-matter-sensor-sps30/ (accessed on 5 June 2020).
- Alfano, B.; Barretta, L.; Del Giudice, A.; de Vito, S.; Di Francia, G.; Esposito, E.; Formisano, F.; Massera, E.; Miglietta, M.L.; Polichetti, T. A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives. Sensors 2020, 20, 6819. [Google Scholar] [CrossRef]
- Sensor Community. Build Your Own Sensor and Join the Worldwide Civic Tech Network. Available online: https://sensor.community/en/ (accessed on 24 March 2021).
- Zusman, M.; Schumacher, C.S.; Gassett, A.J.; Spalt, E.W.; Austin, E.; Larson, T.V.; Carvlin, G.; Seto, E.; Kaufman, J.D.; Sheppard, L. Calibration of low-cost particulate matter sensors: Model development for a multi-city epidemiological study. Environ. Int. 2020, 134, 105329. [Google Scholar] [CrossRef] [PubMed]
- CityOS Air: Community Driven Air Monitoring Network. Available online: https://cityos.io/air (accessed on 1 June 2021).
- Microsoft Corporation. Available online: https://www.microsoft.com/de-de/ (accessed on 20 October 2020).
- Raspberry Pi Foundation. Available online: https://www.raspberrypi.org/ (accessed on 20 October 2020).
- Arduino IDE. Available online: https://www.arduino.cc/ (accessed on 20 October 2020).
- Sousan, S.; Koehler, K.; Hallett, L.; Peters, T.M. Evaluation of the Alphasense Optical Particle Counter (OPC-N2) and the Grimm Portable Aerosol Spectrometer (PAS-1.108). Aerosol. Sci. Technol. 2016, 50, 1352–1365. [Google Scholar] [CrossRef]
- Di Antonio, A.; Popoola, O.A.M.; Ouyang, B.; Saffell, J.; Jones, R.L. Developing a Relative Humidity Correction for Low-Cost Sensors Measuring Ambient Particulate Matter. Sensors 2018, 18, 2790. [Google Scholar] [CrossRef]
- Crilley, L.R.; Shaw, M.; Pound, R.; Kramer, L.J.; Price, R.; Young, S.; Lewis, A.C.; Pope, F.D. Evaluation of a low-cost optical particle counter (Alphasense OPC-N2) for ambient air monitoring. Atmos. Meas. Tech. Discuss. 2018, 1–24. [Google Scholar] [CrossRef]
- Köhler, H. The nucleus in and the growth of Hygroscopic droplets. Trans. Faraday Soc. 1936, 32, 1152–1161. [Google Scholar] [CrossRef]
- Khvorostyanov, V.I.; Curry, J.A. Refinements to the Köhler’s theory of aerosol equilibrium radii, size spectra, and droplet activation: Effects of humidity and insoluble fraction. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- Samad, A.; Melchor Mimiaga, F.E.; Laquai, B.; Vogt, U. Investigating a Low-Cost Dryer Designed for Low-Cost PM Sensors Measuring Ambient Air Quality. Sensors 2021, 21, 804. [Google Scholar] [CrossRef]
- Crilley, L.R.; Singh, A.; Kramer, L.J.; Shaw, M.D.; Alam, M.S.; Apte, J.S.; Bloss, W.J.; Hildebrandt Ruiz, L.; Fu, P.; Fu, W.; et al. Effect of aerosol composition on the performance of low-cost optical particle counter correction factors. Atmos. Meas. Tech. 2020, 13, 1181–1193. [Google Scholar] [CrossRef]
- Laquai, B.; Saur, A. Development of a Calibration Methodology for the SDS011 Low-Cost PM-Sensor with Respect to Professional Reference Instrumentation 2017. Available online: https://www.researchgate.net/publication/322628807_Development_of_a_Calibration_Methodology_for_the_SDS011_Low-Cost_PM-Sensor_with_respect_to_Professional_Reference_Instrumentation (accessed on 2 June 2021).
- Datta, A.; Saha, A.; Zamora, M.L.; Buehler, C.; Hao, L.; Xiong, F.; Gentner, D.R.; Koehler, K. Statistical field calibration of a low-cost PM2.5 monitoring network in Baltimore. Atmos. Environ. 2020, 117761. [Google Scholar] [CrossRef]
- Tanzer, R.; Malings, C.; Hauryliuk, A.; Subramanian, R.; Presto, A.A. Demonstration of a Low-Cost Multi-Pollutant Network to Quantify Intra-Urban Spatial Variations in Air Pollutant Source Impacts and to Evaluate Environmental Justice. Int. J. Environ. Res. Public Health 2019, 16, 2523. [Google Scholar] [CrossRef] [PubMed]
- Mahajan, S.; Kumar, P. Evaluation of low-cost sensors for quantitative personal exposure monitoring. Sustain. Cities Soc. 2020, 57, 102076. [Google Scholar] [CrossRef]
- Seidel, J.; Ketzler, G.; Bechtel, B.; Thies, B.; Philipp, A.; Böhner, J.; Egli, S.; Eisele, M.; Herma, F.; Langkamp, T.; et al. Mobile measurement techniques for local and micro-scale studies in urban and topo-climatology. Erde 2016, 147, 15–39. [Google Scholar] [CrossRef]
- Alphasense NO2-A43BF. Available online: http://www.alphasense.com/WEB1213/wp-content/uploads/2018/12/NO2A43F.pdf (accessed on 19 March 2019).
- Alphasense NO-A4. Available online: http://www.alphasense.com/WEB1213/wp-content/uploads/2016/03/NO-A4.pdf (accessed on 19 March 2019).
- Alphasense OX-A431. Available online: http://www.alphasense.com/WEB1213/wp-content/uploads/2018/12/OXA431.pdf (accessed on 21 March 2019).
- EKO Instruments B.V. ML-01 Si-Pyranometer. Available online: https://eko-eu.com/products/solar-energy/si-pyranometers/mL-01-si-pyranometer (accessed on 2 June 2021).
- Sensiron SHT 35. Available online: https://www.sensirion.com/fileadmin/user_upload/customers/sensirion/Dokumente/2_Humidity_Sensors/Datasheets/Sensirion_Humidity_Sensors_SHT3x_Datasheet_digital.pdf (accessed on 2 June 2021).
- Laquai, B.; Chourdakis, I.; Chacon, M.; Samad, A.; Solis, G.; Vogt, U. A Lower-Cost PM/NO2 Air Quality Measurement Unit with a Low-Cost Air Dryer for Stationary Outdoor Use. 2020. Available online: http://www.opengeiger.de/Feinstaub/SMboxPaperV1_4_060220_1058.pdf (accessed on 2 June 2021).
- Fenner, D.; Meier, F.; Bechtel, B.; Otto, M.; Scherer, D. Intra and inter ‘local climate zone’ variability of air temperature as observed by crowdsourced citizen weather stations in Berlin, Germany. Meteorol. Z. 2017, 26, 525–547. [Google Scholar] [CrossRef]
- European Environment Agency. CORINE Land Cover. Available online: https://www.eea.europa.eu/publications/COR0-landcover (accessed on 18 February 2021).
- Frost, J. How to Interpret Adjusted R-Squared and Predicted R-Squared in Regression. Available online: https://statisticsbyjim.com/regression/interpret-adjusted-r-squared-predicted-r-squared-regression/ (accessed on 18 February 2021).
- Hopper, T. Can We Do Better than R-Squared? Available online: https://tomhopper.me/2014/05/16/can-we-do-better-than-r-squared/ (accessed on 18 February 2021).









| Manufacturer | Model | Dimension | Principle | Measurement and Detection Range | T.R. | Cost |
|---|---|---|---|---|---|---|
| Alphasense Ltd. (Great Britain) | OPC-N2 | 75 × 63.5 × 60 | L.S.S. | 0.38–17 µm, 16 Channels (Number concentration), PM1, PM2.5, PM10 | 1.4 s | N.A. |
| OPC-N3 | 75 × 63.5 × 60 | L.S.S. | 0–2000 µg/m3 0.35–40 µm, 24 Channels (Number concentration), PM1, PM2.5, PM10, Temperature and RH | 1 s | 415 € | |
| OPC-R1 | 72 × 25.5 × 21.5 | L.S.S. | 0.35–12.4 µm 16 Channels (Number concentration), PM1, PM2.5, PM10, Temperature and RH | 1 s | 210 € | |
| Dylos Corp (USA) | DC1700 PM PM2.5/PM10 AQM | 17.8 × 11.4 × 7.6 | L.S.S. | 0–106 Particle/cm3 >0.5 and >2.5 µm and PM2.5 and PM10 in µg/m3 | 60 s | 420 € |
| Honeywell (USA) | HPMA115SO-XXX | 36 × 43 × 24 | L.S.S. | 0–1000 µg/m3 PM2.5 in µg/m3 (PM10 in µg/m3 with additional programming) | N.A. | 30 € |
| Met One (USA) | 831 Aerosol Mass Monitor | 159 × 92.2 × 50.8 | Photometer | 0–1.000 µg/m3 >0.1 µm | 60 s | 1700 € |
| Nova Fitness (China) | SDS011 | 71 × 70 × 23 | L.S.S. | 0–999.9 µg/m3 0.3–10 µm | 1 s | 30 € |
| SDS018 | 59 × 45 × 20 | L.S.S. | 0–999.9 µg/m3 0.3–10 µm | 1 s | 30 € | |
| SDS198 | 71 × 70 × 23 | L.S.S. | 0–20 mg/m3 1–100 µm | 1 s | 30 € | |
| Plantower (China) | PMS 1003 | 65 × 42 × 23 | L.S.S. | 0–500 µg/m3 0.3–1.0; 1.0–2.5; 2.5–10 µm in three channels | N.A. | 15 € |
| PMSA003 | 38 × 35 × 12 | L.S.S. | 0–500 µg/m3 0.3–1.0; 1.0–2.5; 2.5–10 µm in three channels | N.A. | 20 € | |
| PMS 3003 | 65 × 42 × 23 | L.S.S. | 0.3–1.0; 1.0–2.5; 2.5–10 µm in three channels | N.A. | 20 € | |
| PMS 5003 | N.A. | L.S.S. | N.A. | N.A. | 15 € | |
| PMS 7003 | N.A. | L.S.S. | N.A. | N.A. | 20 € | |
| Samyoung (South Korea) | PSML(LPO) | N.A. | Photometer | 0–900 μg/m3 PM2.5 and PM1 | 1 s | N.A. |
| DSM501A | N.A. | Photometer | >1 µm | N.A. | 17 € | |
| Sensiron (Switzerland) | SPS30 | 40.6 × 40.6 × 12.2 | L.S.S | 1–1000 μg/m3 PM1, PM2.5, PM4, and PM10 (Mass) PM0.5, PM1, PM2.5, PM4 and PM10 (Particle number) | N.A. | 40 € |
| Sharp (Japan) | GP2Y1010AU0F | 46 × 30 × 17.6 | Photometer | N.A. | N.A. | 12 € |
| DN7C3CA006 | 51 × 53 × 40 | Photometer | 25–500 µg/m3 | N.A. | 22 € | |
| Shinyei (China) | PPD42NJ | 59 × 45 × 22 | Photometer | >1 µm | N.A. | 25 € |
| PPD60PV-T2 | 88 × 60 × 20 | Photometer | >0.5 µm | N.A. | N.A. | |
| PPD20V | 88 × 60 × 20 | Photometer | >1 µm | N.A. | N.A. | |
| PPD71 | 34 × 30 × 28 | Photometer | >0.5 µm | N.A. | N.A. | |
| Winsen (China) | ZH03B | 50 × 32.4 × 21 | Photometer | 0–1000 µg/m3 | N.A. | 32 € |
| Manufacturer | Model | T and RH | Voltage and Power Consumption | Uncertainty | Sensor Life | Integrated Calibration | Reaction Time |
|---|---|---|---|---|---|---|---|
| Alphasense Ltd. (Great Britain) | OPC-N2 | −10–50 °C 0–95% (n.c.) | 4.8–5.2 V 0.90 W | N.A. | N.A. | No | N.A. |
| OPC-N3 | −10–50 °C 0–95% (n.c.) | 4.8–5.2 V 0.90 W | N.A. | N.A. | Yes | N.A. | |
| OPC-R1 | −10–50 °C 0–95% (n.c.) | 4.8–5.2 V 0.48 W | N.A. | N.A. | Yes | N.A. | |
| Dylos Corp (USA) | DC1700 PM PM2.5/PM10 AQM | N.A. | 110 V or Battery | N.A. | N.A. | Yes | 6 s |
| Honeywell (USA) | HPMA115SO-XXX | −10–50 °C 0–95% (n.c.) | 5 ± 0.2 V 0.40 W | ±15 µg/m3 (0–100 µg/m3) ±15% (100–1000 µg/m3) at 25 ± 5 °C | 20,000 h | No | <6 s |
| Met One (USA) | 831 Aerosol Mass Monitor | 0–50 °C | 100–240 V to 8.4 V(AC/DC) Li-Battery, rechargeable | N.A. | N.A. | Yes | N.A. |
| Nova Fitness (China) | SDS011 | −20–60 °C <70% | 5 ± 0.2 V 0.40 W | Max. ±15% and ±10 µg/m3 at 25 °C, 50% RH | N.A. | No | <10 s |
| SDS018 | −20–60 °C <70% | 5 ± 0.2 V 0.35 W | Max. ±15% and ±10 µg/m3 at 25 °C, 50% RH | N.A. | No | <10 s | |
| SDS198 | −20–60 °C <70% | 5 ± 0.2 V 0.40 W | Max. ±20% and ±30 µg/m3 at 25 °C, 50% RH | N.A. | No | <10 s | |
| Plantower (China) | PMS 1003 | N.A. | 5 ± 0.2 V | N.A. | N.A. | No | N.A. |
| PMSA003 | −10–60 °C 0–99% | 5 ± 0.5 V | ±10 µg/m3 (0–100 µg/m3) ±10% (100–500 µg/m3) | N.A. | No | 10 s | |
| PMS 3003 | N.A. | 5 ± 0.2 V | N.A. | N.A. | No | N.A. | |
| PMS 5003 | N.A. | N.A. | N.A. | N.A. | No | N.A. | |
| PMS 7003 | N.A. | N.A. | N.A. | N.A. | No | N.A. | |
| Samyoung (South Korea) | PSML(LPO) | −10–65 °C <95% (n.c.) | 5.0 ± 10% V 0.43 W | N.A. | N.A. | No | N.A. |
| DSM501A | −10–65 °C | 5 ± 0.5 V | N.A. | N.A. | No | N.A. | |
| Sensiron (Switzerland) | SPS30 | −10–60 °C | 5 ± 0.5 V 0.30 W | ±10 μg/m3 (0 to 100 μg/m3) ±10% (100–1000 μg/m3) | >8 Years | Yes | N.A. |
| Sharp (Japan) | GP2Y1010AU0F | −10–60 °C 10–90% | 5 ± 0.5 V 0.10 W | N.A. | N.A. | No | N.A. |
| DN7C3CA006 | −10–60 °C 10–90% | 5 ± 0.25 V 0.10 W | N.A. | N.A. | No | N.A. | |
| Shinyei (China) | PPD42NJ | 0–45 °C <95% (n.c.) | 5 ± 0.2 V | N.A. | N.A. | No | N.A. |
| PPD60PV-T2 | 0–45 °C <95% (n.c.) | 5 ± 0.2 V | N.A. | N.A. | No | N.A. | |
| PPD20V | 0–40 °C <95% (n.c.) | 5 ± 0.2 V | N.A. | N.A. | No | N.A. | |
| PPD71 | −10–60 °C <95% (n.c.) | 5 ± 10% V | N.A. | N.A. | No | N.A. | |
| Winsen (China) | ZH03B | −10–50 °C 0–85% (n.c.) | 5 ± 0.1 V 0.60 W | N.A. | 3 Years | No | N.A. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venkatraman Jagatha, J.; Klausnitzer, A.; Chacón-Mateos, M.; Laquai, B.; Nieuwkoop, E.; van der Mark, P.; Vogt, U.; Schneider, C. Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research. Sensors 2021, 21, 3960. https://doi.org/10.3390/s21123960
Venkatraman Jagatha J, Klausnitzer A, Chacón-Mateos M, Laquai B, Nieuwkoop E, van der Mark P, Vogt U, Schneider C. Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research. Sensors. 2021; 21(12):3960. https://doi.org/10.3390/s21123960
Chicago/Turabian StyleVenkatraman Jagatha, Janani, André Klausnitzer, Miriam Chacón-Mateos, Bernd Laquai, Evert Nieuwkoop, Peter van der Mark, Ulrich Vogt, and Christoph Schneider. 2021. "Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research" Sensors 21, no. 12: 3960. https://doi.org/10.3390/s21123960
APA StyleVenkatraman Jagatha, J., Klausnitzer, A., Chacón-Mateos, M., Laquai, B., Nieuwkoop, E., van der Mark, P., Vogt, U., & Schneider, C. (2021). Calibration Method for Particulate Matter Low-Cost Sensors Used in Ambient Air Quality Monitoring and Research. Sensors, 21(12), 3960. https://doi.org/10.3390/s21123960