
The Development of a New IFOG-Based 3C Rotational Seismometer

 , ,
, ,
Abstract
1. Introduction
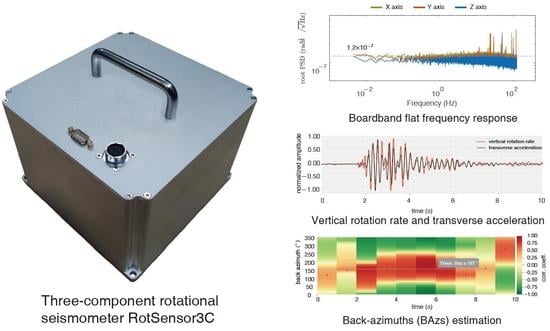
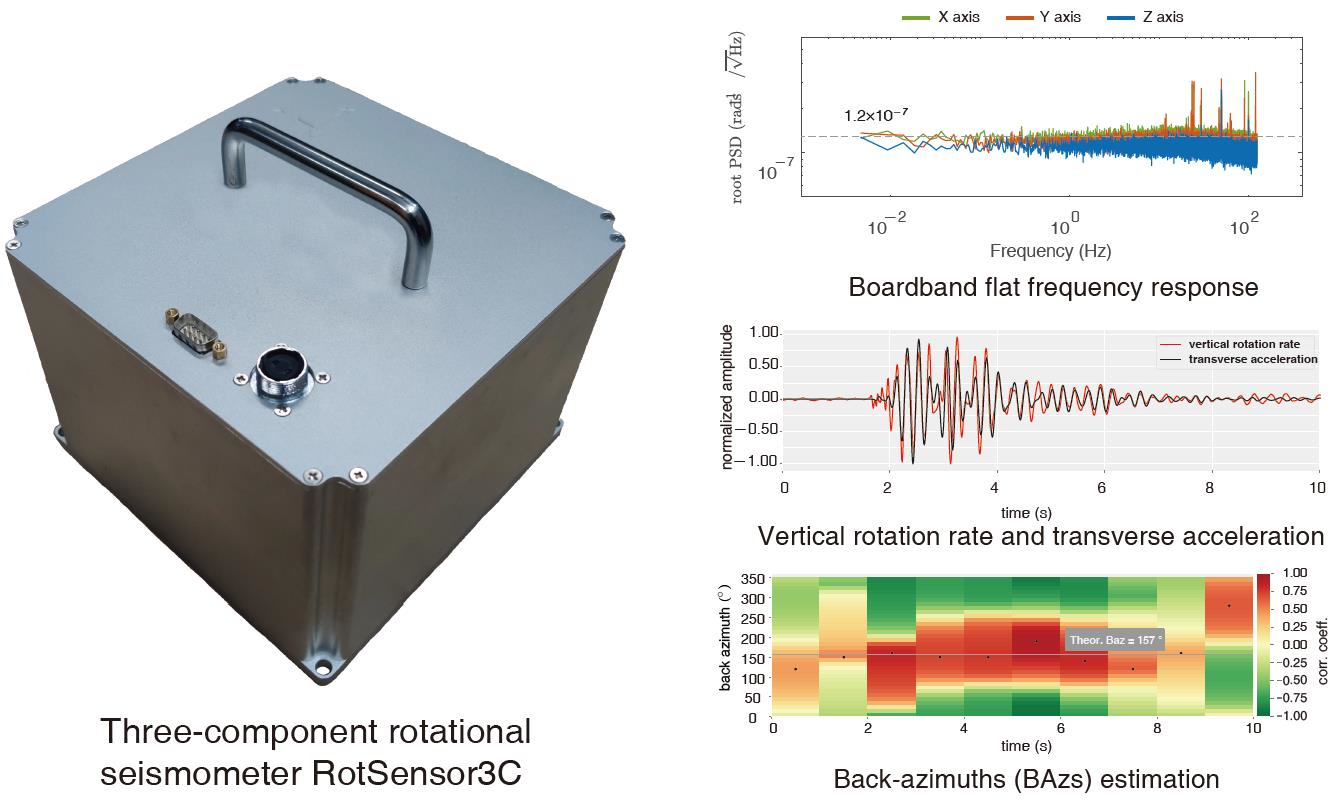
2. Three-Component Rotational Seismometer
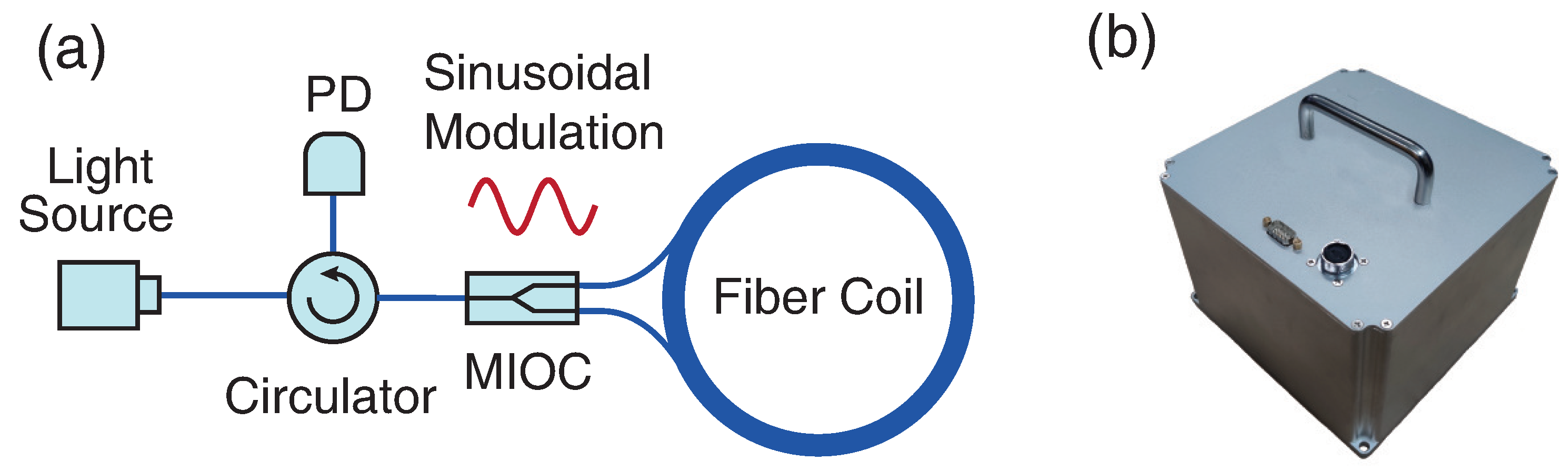
2.1. Working Principal
2.2. Laboratory Tests of 3C Rotation Sensors
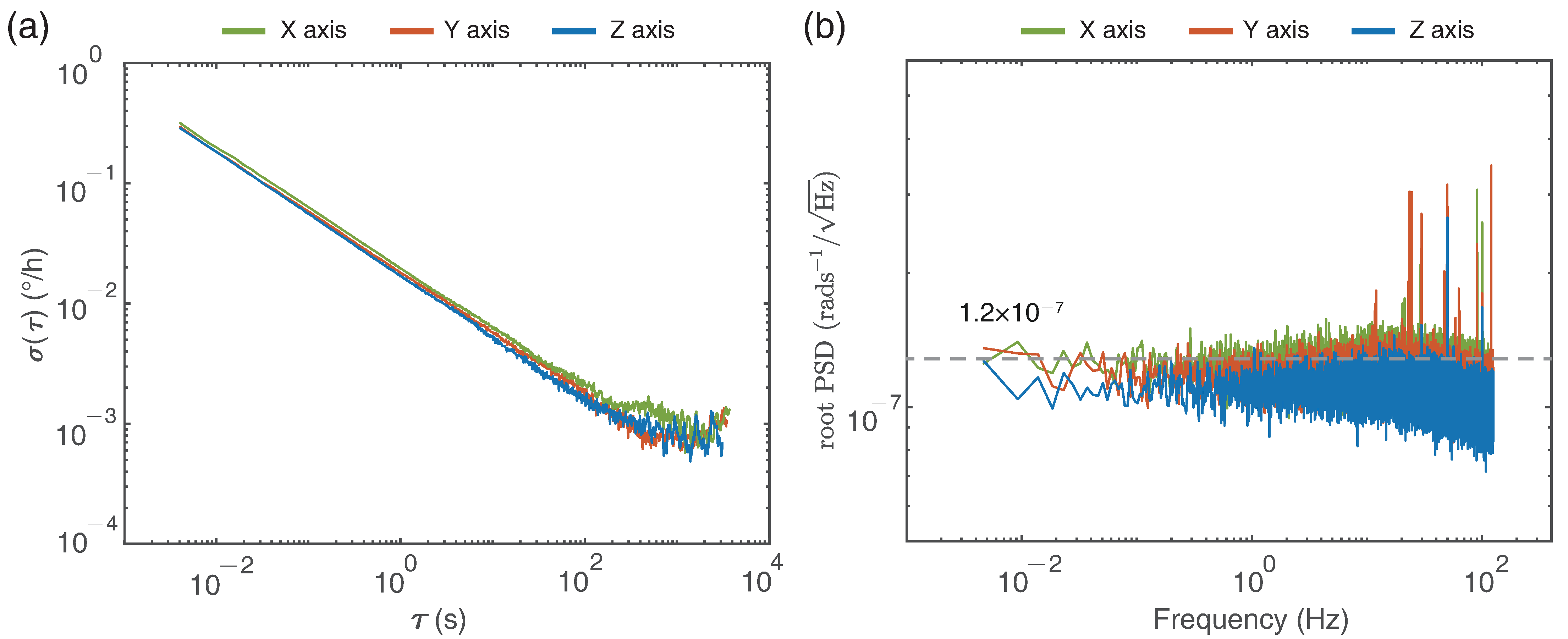
2.2.1. Stability over Time
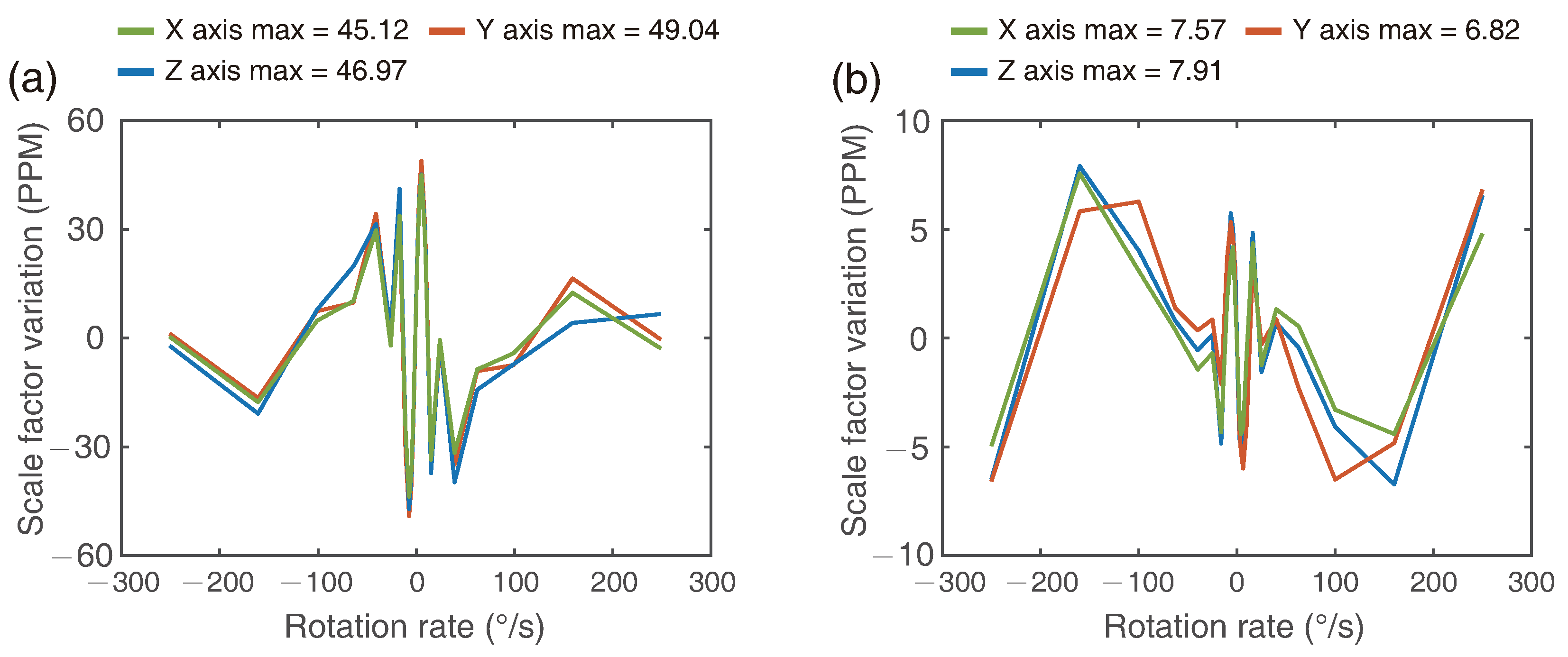
2.2.2. Scale Factor Linearity
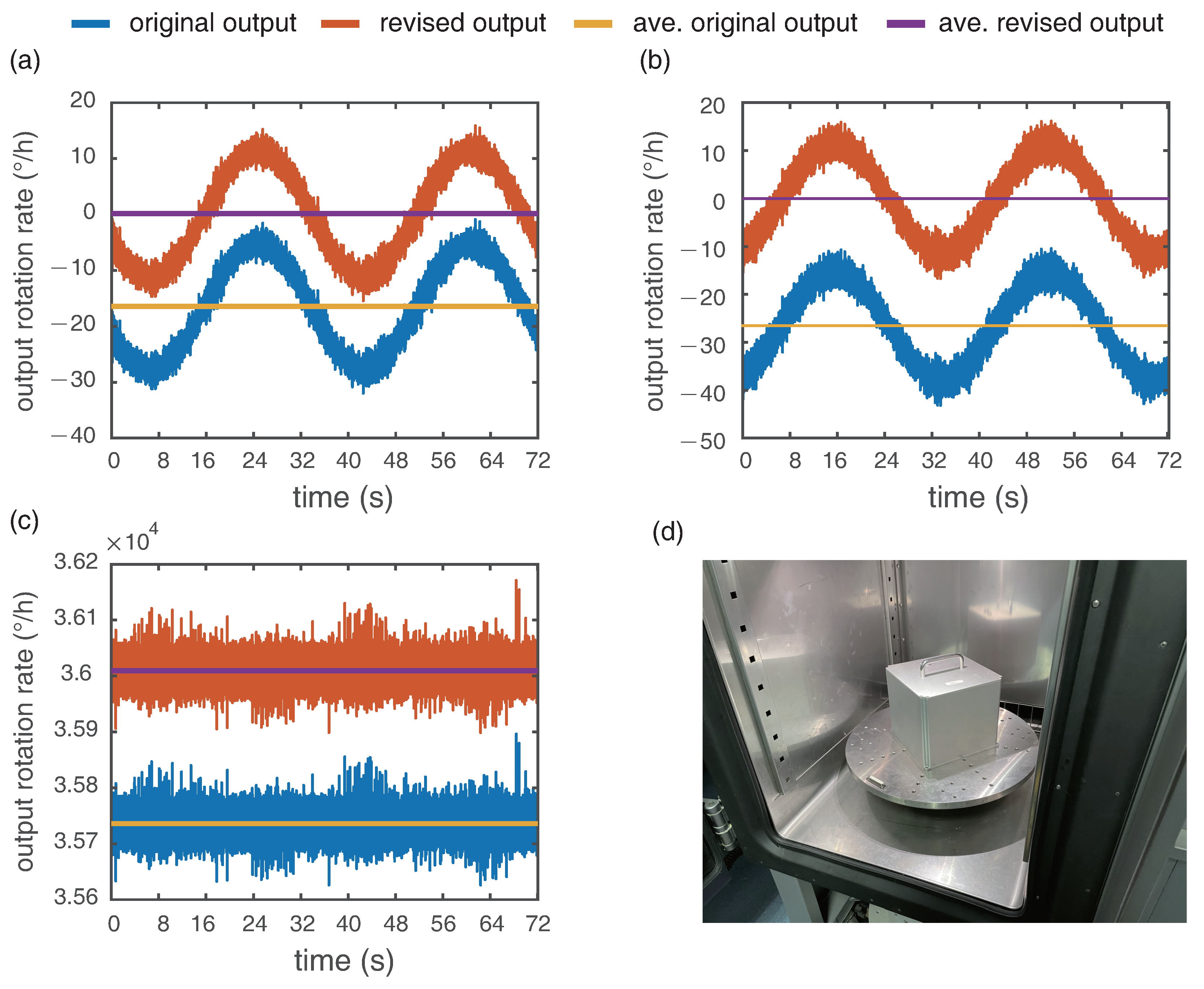
2.2.3. Sensor-Axis Orthogonality
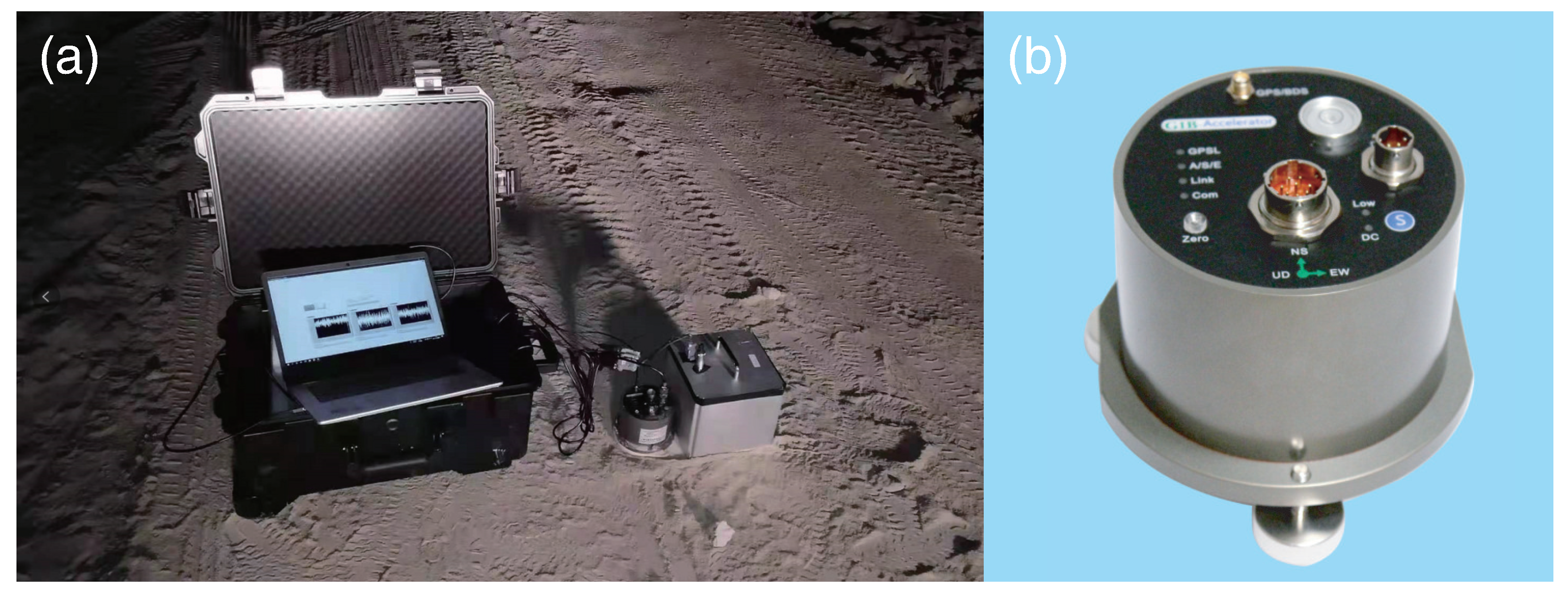
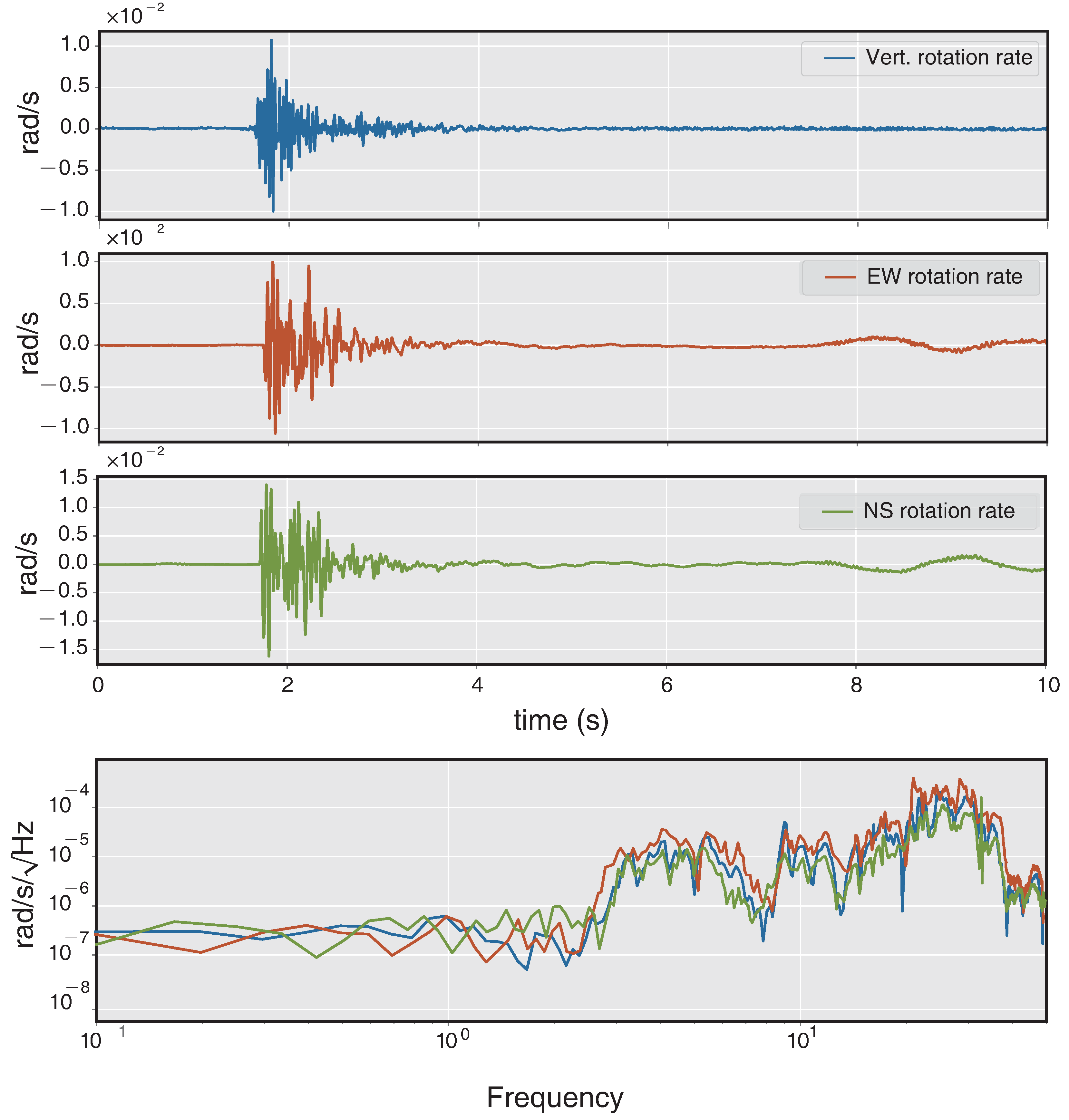
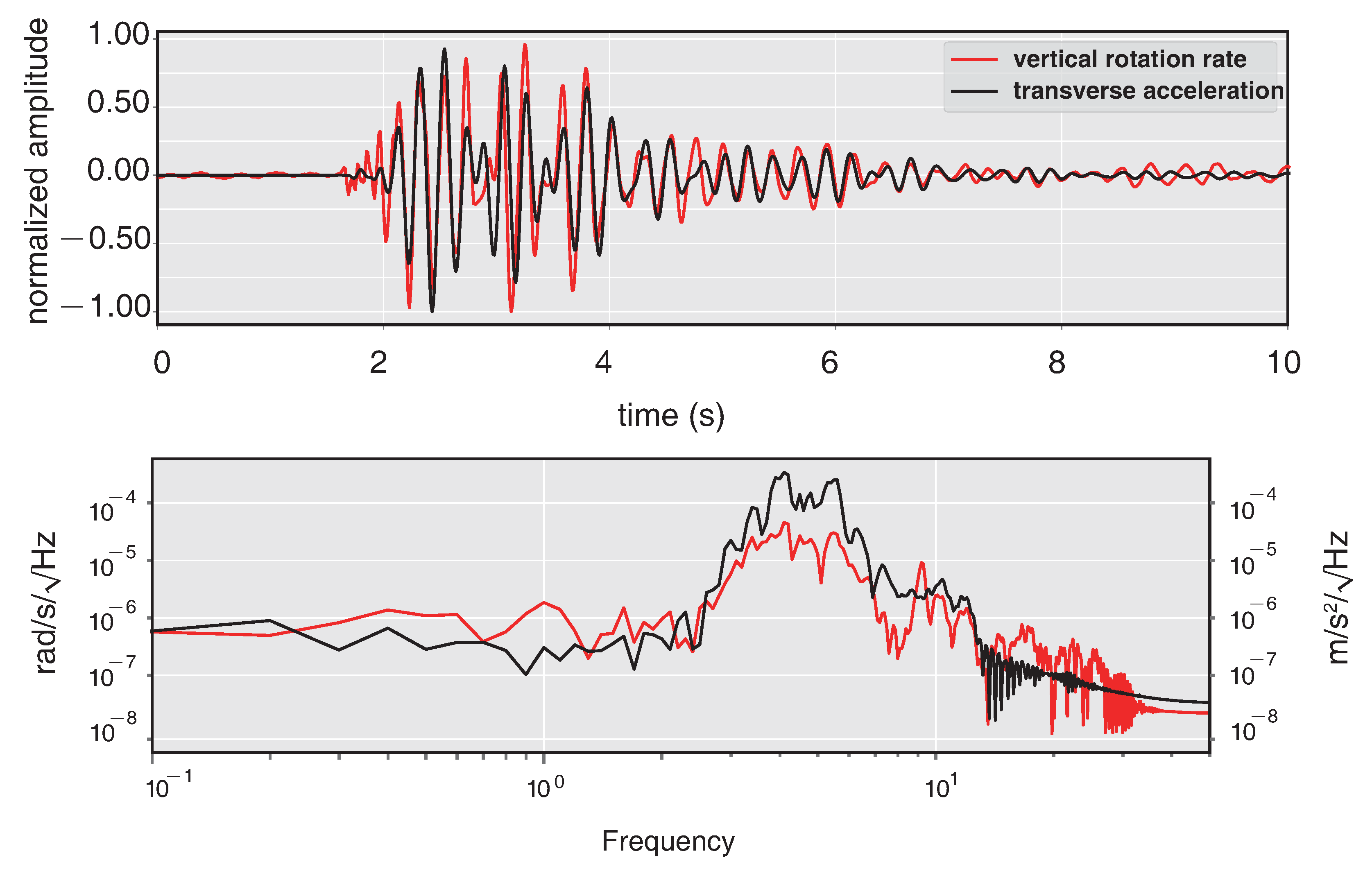
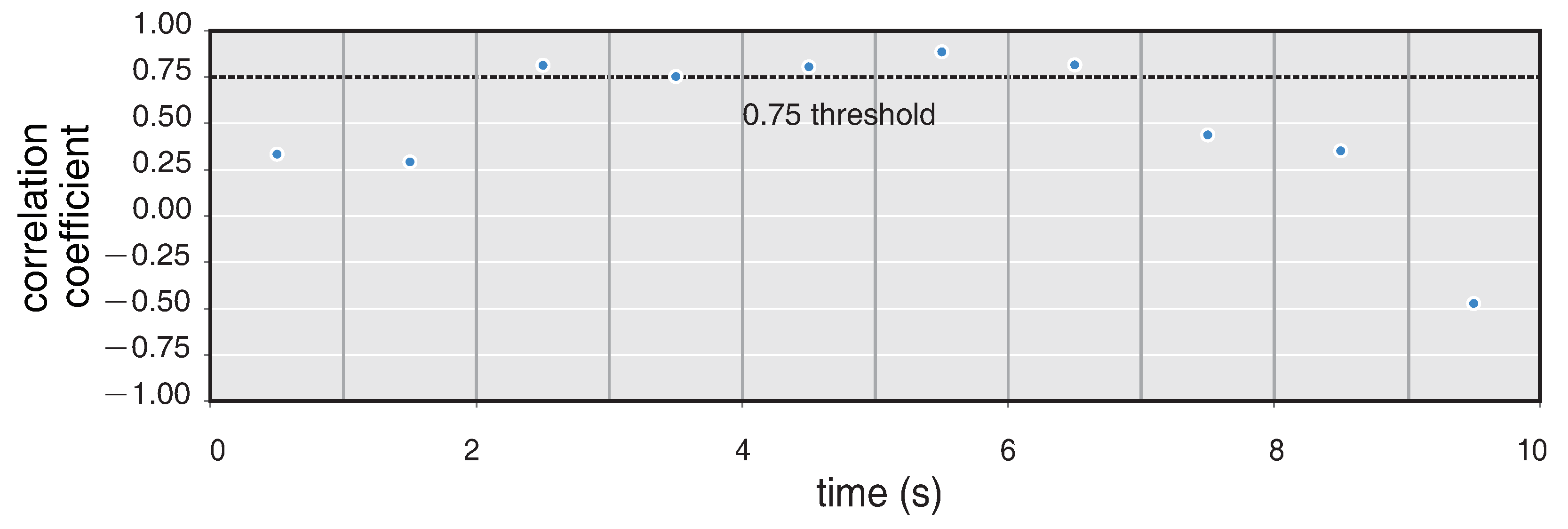
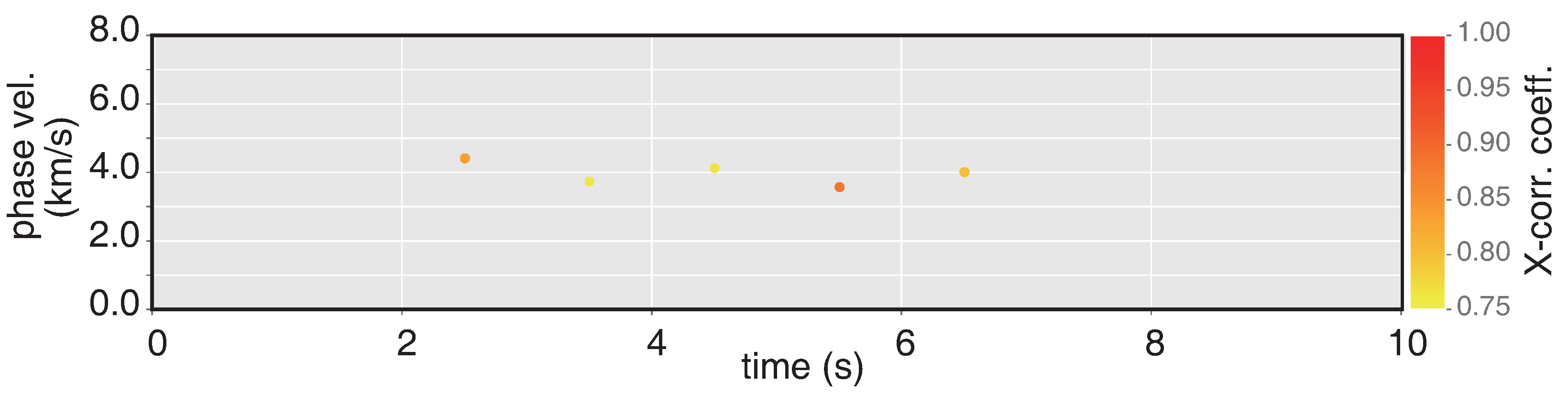
3. Near Field Explosion Seismic Test
4. Conclusions and Prospects
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Cochard, A.; Igel, H.; Schuberth, B.; Suryanto, W.; Velikoseltsev, A.; Schreiber, U.; Wassermann, J.; Scherbaum, F.; Vollmer, D. Rotational motions in seismology: Theory, observation, simulation. In Earthquake Source Asymmetry, Structural Media and Rotation Effects; Springer: Berlin/Heidelberg, Germany, 2006; pp. 391–411. [Google Scholar]
- Lee, W.H.; Igel, H.; Trifunac, M.D. Recent advances in rotational seismology. Seismol. Res. Lett. 2009, 80, 479–490. [Google Scholar] [CrossRef]
- Pham, N.D. Rotational Motions in Seismology: Theory, Observation, Modeling. Ph.D. Thesis, Ludwig-Maximilians-Universität München, München, Germany, 2009. [Google Scholar]
- Guéguen, P.; Guattari, F.; Aubert, C.; Laudat, T. Comparing Direct Observation of Torsion with Array-Derived Rotation in Civil Engineering Structures. Sensors 2021, 21, 142. [Google Scholar] [CrossRef]
- Bońkowski, P.A.; Zembaty, Z.; Minch, M.Y. Engineering analysis of strong ground rocking and its effect on tall structures. Soil Dyn. Earthq. Eng. 2019, 116, 358–370. [Google Scholar] [CrossRef]
- Guéguen, P.; Astorga, A. The torsional response of civil engineering structures during earthquake from an observational point of view. Sensors 2021, 21, 342. [Google Scholar] [CrossRef]
- Sollberger, D.; Igel, H.; Schmelzbach, C.; Edme, P.; van Manen, D.J.; Bernauer, F.; Yuan, S.; Wassermann, J.; Schreiber, U.; Robertsson, J.O. Seismological Processing of Six Degree-of-Freedom Ground-Motion Data. Sensors 2020, 20, 6904. [Google Scholar] [CrossRef]
- Igel, H.; Cochard, A.; Wassermann, J.; Flaws, A.; Schreiber, U.; Velikoseltsev, A.; Pham Dinh, N. Broad-band observations of earthquake-induced rotational ground motions. Geophys. J. Int. 2007, 168, 182–196. [Google Scholar] [CrossRef]
- Huang, B.; Liu, C.; Lin, C.; Wu, C.; Lee, W. Measuring mid-and near-field rotational ground motions in Taiwan. Presented at the 2006 Fall AGU Meeting, San Francisco, CA, USA, 14 December 2006. [Google Scholar]
- Liu, C.C.; Huang, B.S.; Lee, W.H.; Lin, C.J. Observing rotational and translational ground motions at the HGSD station in Taiwan from 2007 to 2008. Bull. Seismol. Soc. Am. 2009, 99, 1228–1236. [Google Scholar] [CrossRef]
- Kurzych, A.; Jaroszewicz, L.R.; Krajewski, Z.; Teisseyre, K.P.; Kowalski, J.K. Fibre optic system for monitoring rotational seismic phenomena. Sensors 2014, 14, 5459–5469. [Google Scholar] [CrossRef]
- Velikoseltsev, A.; Schreiber, K.U.; Yankovsky, A.; Wells, J.P.R.; Boronachin, A.; Tkachenko, A. On the application of fiber optic gyroscopes for detection of seismic rotations. J. Seismol. 2012, 16, 623–637. [Google Scholar] [CrossRef]
- Bernauer, F.; Wassermann, J.; Guattari, F.; Frenois, A.; Bigueur, A.; Gaillot, A.; de Toldi, E.; Ponceau, D.; Schreiber, U.; Igel, H. BlueSeis3A: Full characterization of a 3C broadband rotational seismometer. Seismol. Res. Lett. 2018, 89, 620–629. [Google Scholar] [CrossRef]
- Jaroszewicz, L.R.; Kurzych, A.; Krajewski, Z.; Marć, P.; Kowalski, J.K.; Bobra, P.; Zembaty, Z.; Sakowicz, B.; Jankowski, R. Review of the usefulness of various rotational seismometers with laboratory results of fibre-optic ones tested for engineering applications. Sensors 2016, 16, 2161. [Google Scholar] [CrossRef]
- Post, E.J. Sagnac effect. Rev. Mod. Phys. 1967, 39, 475. [Google Scholar] [CrossRef]
- Vali, V.; Shorthill, R. Fiber ring interferometer. Appl. Opt. 1976, 15, 1099–1100. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Cao, Y.; He, D.; Wu, Y.; Chen, F.; Peng, C.; Li, Z. Thermal phase noise in giant interferometric fiber optic gyroscopes. Opt. Express 2019, 27, 14121–14132. [Google Scholar] [CrossRef]
- Allan, D.W. Statistics of atomic frequency standards. Proc. IEEE 1966, 54, 221–230. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2007, 57, 140–149. [Google Scholar] [CrossRef]
- Lefevre, H.C. The Fiber-Optic Gyroscope; Artech House: London, UK, 2014. [Google Scholar]
- Böhm, K.; Marten, P.; Weidel, E.; Petermann, K. Direct rotation-rate detection with a fibre-optic gyro by using digital data processing. Electron. Lett. 1983, 19, 997–999. [Google Scholar] [CrossRef]
- Gronau, Y.; Tur, M. Digital signal processing for an open-loop fiber-optic gyroscope. Appl. Opt. 1995, 34, 5849–5853. [Google Scholar] [CrossRef]
- Zhao, X.Q.; Chao, D.H.; Song, L.L. Calibration method for angle speed sensor based on single-axis rate turntable. Transducer Microsyst. Technol. 2014, 33, 52–55. [Google Scholar]
- Kislov, K.; Gravirov, V. Rotational Seismology: Review of Achievements and Outlooks. Seism. Instrum. 2021, 57, 187–202. [Google Scholar] [CrossRef]
- Yuan, S.; Simonelli, A.; Lin, C.J.; Bernauer, F.; Donner, S.; Braun, T.; Wassermann, J.; Igel, H. Six Degree-of-Freedom Broadband Ground-Motion Observations with Portable Sensors: Validation, Local Earthquakes, and Signal Processing. Bull. Seismol. Soc. Am. 2020, 110, 953–969. [Google Scholar] [CrossRef]
- Suryanto, W.; Igel, H.; Wassermann, J.; Cochard, A.; Schuberth, B.; Vollmer, D.; Scherbaum, F.; Schreiber, U.; Velikoseltsev, A. First comparison of array-derived rotational ground motions with direct ring laser measurements. Bull. Seismol. Soc. Am. 2006, 96, 2059–2071. [Google Scholar] [CrossRef]
- Lin, C.J.; Huang, H.P.; Pham, N.D.; Liu, C.C.; Chi, W.C.; Lee, W.H. Rotational motions for teleseismic surface waves. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- He, D.; Cao, Y.; Zhou, T.; Peng, C.; Li, Z. Sensitivity enhancement through RIN suppression in dual-polarization fiber optic gyroscopes for rotational seismology. Opt. Express 2020, 28, 34717–34729. [Google Scholar] [CrossRef]
- Luo, R.; Li, Y.; Deng, S.; He, D.; Peng, C.; Li, Z. Compensation of thermal strain induced polarization nonreciprocity in dual-polarization fiber optic gyroscope. Opt. Express 2017, 25, 26747–26759. [Google Scholar] [CrossRef]
- Liu, P.; Li, X.; Guang, X.; Xu, Z.; Ling, W.; Yang, H. Drift suppression in a dual-polarization fiber optic gyroscope caused by the Faraday effect. Opt. Commun. 2017, 394, 122–128. [Google Scholar] [CrossRef]
- Aki, K.; Richards, P.G. Quantitative Seismology; University Science Book: Mill Valley, CA, USA, 2002. [Google Scholar]
- Igel, H.; Schreiber, U.; Flaws, A.; Schuberth, B.; Velikoseltsev, A.; Cochard, A. Rotational motions induced by the M8. 1 Tokachi-oki earthquake, September 25, 2003. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance | RotSensor3C | R-2 | BlueSeis3A |
|---|---|---|---|
| Sensor self-noise | |||
| Frequency range | 0.005–125 Hz | 0.03–50 Hz | 0.001–100 Hz |
| Dynamic range | 152 dB | 117 dB | 135 dB |
| Scale factor linearity | <10 ppm | No data | <20 ppm |
| Dimensions (L × W × H) | 190 × 190 × 165 mm | 120 × 120 × 102 mm | 300 × 300 × 280 mm |
| (No battery) | (No battery) | ||
| Weight | 4.5 kg (No bat.) | 9.53 kg (No bat.) | 20 kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Chen, Y.; Zhou, T.; Yang, C.; Zhu, L.; Zhang, D.; Cao, Y.; Zeng, W.; He, D.; Li, Z. The Development of a New IFOG-Based 3C Rotational Seismometer. Sensors 2021, 21, 3899. https://doi.org/10.3390/s21113899
Cao Y, Chen Y, Zhou T, Yang C, Zhu L, Zhang D, Cao Y, Zeng W, He D, Li Z. The Development of a New IFOG-Based 3C Rotational Seismometer. Sensors. 2021; 21(11):3899. https://doi.org/10.3390/s21113899
Chicago/Turabian StyleCao, Yuwen, Yanjun Chen, Tong Zhou, Chunxia Yang, Lanxin Zhu, Dingfan Zhang, Yujia Cao, Weiyi Zeng, Dong He, and Zhengbin Li. 2021. "The Development of a New IFOG-Based 3C Rotational Seismometer" Sensors 21, no. 11: 3899. https://doi.org/10.3390/s21113899
APA StyleCao, Y., Chen, Y., Zhou, T., Yang, C., Zhu, L., Zhang, D., Cao, Y., Zeng, W., He, D., & Li, Z. (2021). The Development of a New IFOG-Based 3C Rotational Seismometer. Sensors, 21(11), 3899. https://doi.org/10.3390/s21113899