
IoT Sensing for Reality-Enhanced Serious Games, a Fuel-Efficient Drive Use Case


 ,
,  ,
, 
Abstract
1. Introduction
2. Literature Review
3. Experimental Settings
4. Instant Fuel Consumption Estimation
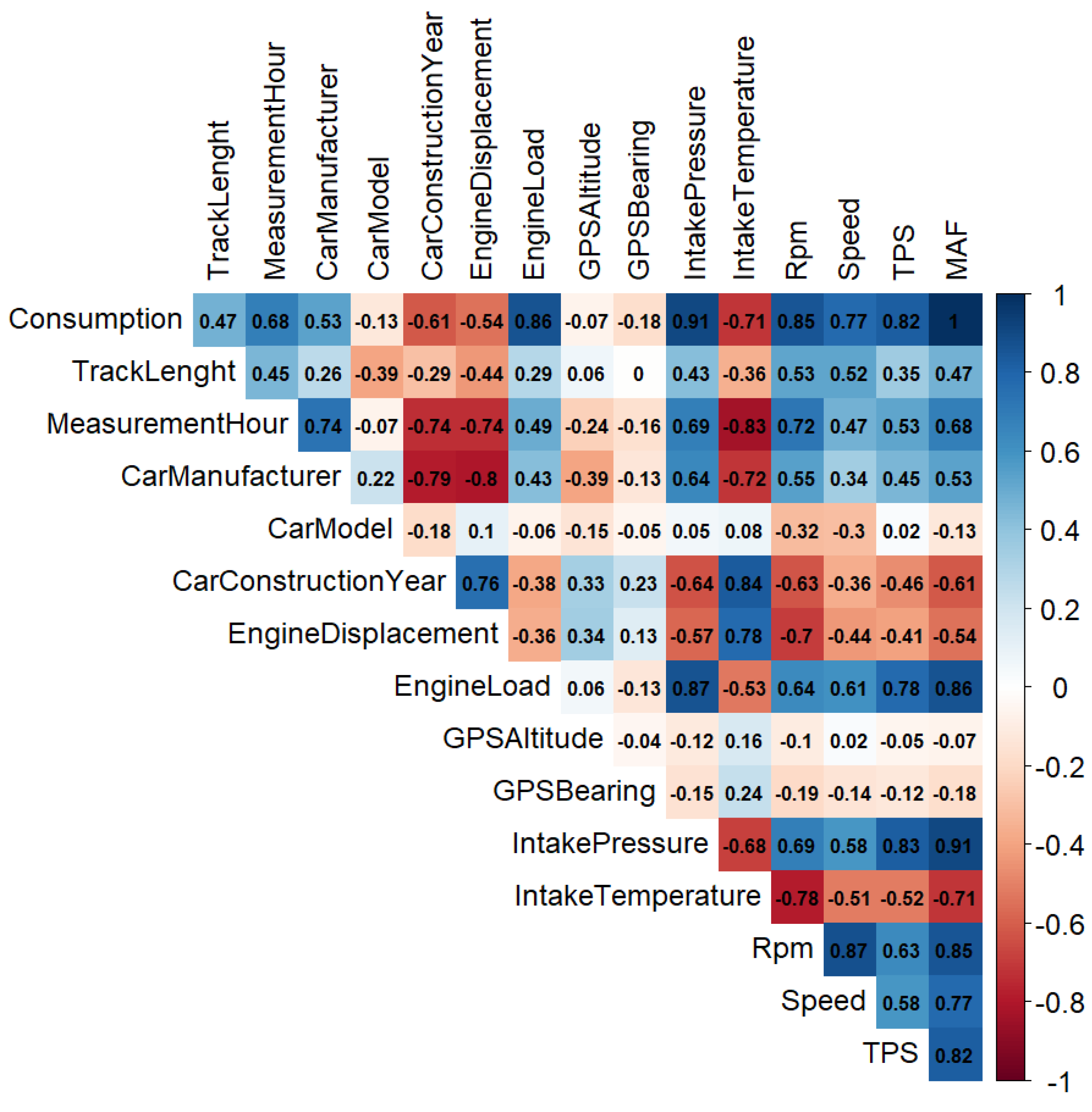
4.1. Data Analysis and Predictors Selection
4.2. Fuel Consumption Modeling
5. Instant Driving Recommendations
6. Results/Case Study and Discussion
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge Computing: Vision and Challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Drakoulis, R.; Bellotti, F.; Bakas, I.; Berta, R.; Paranthaman, P.K.; Dange, G.R.; Lytrivis, P.; Pagle, K.; De Gloria, A.; Amditis, A.; et al. A Gamified Flexible Transportation Service for On-Demand Public Transport. IEEE Trans. Intell. Transp. Syst. 2018, 19, 921–933. [Google Scholar] [CrossRef]
- Fijnheer, J.D.; van Oostendorp, H. Steps to design a household energy game. In Proceedings of the International Conference on Games and Learning Alliance, Rome, Italy, 9–11 December 2015; pp. 12–22. [Google Scholar]
- Bellotti, F.; Berta, R.; Paranthaman, P.K.; Dange, G.; De Gloria, A. REAL: Reality-Enhanced AppLied-games. IEEE Trans. Games (T-G) 2019, 12, 281–290. [Google Scholar] [CrossRef]
- Ritterfeld, U.; Cody, M.; Vorderer, P. Serious Games: Mechanisms and Effects; Routledge: New York, NY, USA, 2009; pp. 3–9. ISBN 978-1-135-84891-0. [Google Scholar]
- Kosmides, P.; Demestichas, K.; Adamopoulou, E.; Koutsouris, N.; Oikonomidis, Y.; De Luca, V. InLife: Combining Real Life with Serious Games using IoT. In Proceedings of the P2018 IEEE Conference on Computational Intelligence and Games (CIG), Maastricht, The Netherlands, 14–17 August 2018; pp. 1–7. [Google Scholar]
- Shalev-Shwartz, S.; Ben-David, S. Understanding Machine Learning: From Theory to Algorithms; Cambridge University Press: Cambridge, UK, 2014; pp. 1–12. ISBN 978-1-107-05713-5. [Google Scholar]
- Ma, H.; Xie, H.; Huang, D.; Xiong, S. Effects of driving style on the fuel consumption of city buses under different road conditions and vehicle masses. Transp. Res. D Transp. Environ. 2015, 41, 205–216. [Google Scholar] [CrossRef]
- Gonder, J.; Earleywine, M.; Sparks, W. Analyzing vehicle fuel saving opportunities through intelligent driver feedback. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2012, 5, 446–450. [Google Scholar] [CrossRef]
- Bingham, C.; Walsh, C.; Carroll, S. Impact of driving characteristics on electric vehicle energy consumption and range. IET Intel. Transport Syst. 2012, 6, 29–35. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, G.; Ou, B. A fuel economy optimization system with applications in vehicles with human drivers and autonomous vehicles. Transport. Res. Part D: Transp. Environ. 2012, 16, 515–524. [Google Scholar] [CrossRef]
- Walker, G.H.; Stanton, N.A.; Young, M.S. Hierarchical task analysis of driving: A new research tool. In Contemporary Ergonomics; CRC Press: Boca Raton, FL, USA, 2001; pp. 435–440. [Google Scholar]
- Tulusan, J.; Soi, L.; Paefgen, J.; Brogle, M.; Staake, T. Eco-efficient feedback technologies: Which eco-feedback types prefer drivers most? In Proceedings of the IEEE International Symposium on World of Wireless Mobile and Multimedia Networks (WoWMoM), Lucca, Italy, 7–11 June 2011; pp. 1–8. [Google Scholar]
- Magana, V.C.; Munoz-Organero, M. Gafu: Using a gamification tool to save fuel. IEEE Intell. Transp. Syst. Mag. 2015, 7, 58–70. [Google Scholar] [CrossRef]
- Li, G.; Li, S.E.; Cheng, B.; Green, P. Estimation of driving style in naturalistic highway traffic using maneuver transition probabilities. Transp. Res. Part C Emerg. Technol. 2017, 74, 113–125. [Google Scholar] [CrossRef]
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the 14th 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar]
- Panou, M.C. Intelligent personalized ADAS warnings. Eur. Transp. Res. Rev. 2018, 10, 59. [Google Scholar] [CrossRef]
- Gamberini, L.; Spagnolli, A.; Corradi, N.; Jacucci, G.; Tusa, G.; Mikkola, T.; Hoggan, E. Tailoring Feedback to Users’ Actions in a Persuasive Game for Household Electricity Conservation. In Proceedings of the International conference on persuasive technology, Oulu, Finland, 4–6 June 2012; pp. 100–111. [Google Scholar]
- Reeves, B.; Cummings, J.J.; Scarborough, J.K.; Yeykelis, L. Increasing Energy Efficiency With Entertainment Media: An Experimental and Field Test of the Influence of a Social Game on Performance of Energy Behaviors. Environ. Behav. 2015, 47, 102–115. [Google Scholar] [CrossRef]
- Fijnheer, J.D.; van Oostendorp, H. Steps to Design a Household Energy Game. Int. J. Serious Games 2016, 3. [Google Scholar] [CrossRef]
- Fijnheer, J.D.L.; van Oostendorp, H.; Veltkamp, R. Household Energy Conservation Intervention: A Game versus Dashboard Comparison. Int. J. Serious Games 2019, 6, 23–36. [Google Scholar] [CrossRef]
- Göbel, S.; Hardy, S.; Wendel, V.; Mehm, F.; Steinmetz., R. Serious games for health: Personalized exergames. In Proceedings of the 18th ACM international conference on Multimedia (MM’10), New York, NY, USA, 25–29 October 2010; pp. 1663–1666. [Google Scholar]
- Bellotti, F.; Kopetzki, S.; Berta, R.; Paranthaman, P.K.; Dange, G.R.; Lytrivis, P.; Amditis, A.J.; Raffero, M.; Aittoniemi, E.; Basso, R.; et al. Team applications for collaborative road mobility. IEEE Trans. Industr. Inform. 2018, 15, 1105–1119. [Google Scholar] [CrossRef]
- Melthis, J.; Tang, S.O.T.; Yang, P.; Hanneghan, M.; Carter, C. Topologies for combining the Internet of Things and Serious Games. J. Intell. Fuzzy Syst. 2016, 31, 2685–2696. [Google Scholar] [CrossRef]
- Postolache, O.; Hemanth, D.J.; Alexandre, R.; Gupta, D.; Geman, O.; Khanna, A. Remote Monitoring of Physical Rehabilitation of Stroke Patients Using IoT and Virtual Reality. IEEE J. Sel. Areas Commun. 2021, 39, 562–573. [Google Scholar] [CrossRef]
- Lazzaroni, L.; Mazzara, A.; Bellotti, F.; De Gloria, A.; Berta, R. Employing an IoT Framework as a Generic Serious Games Analytics Engine. In Games and Learning Alliance. In GALA 2020. Lecture Notes in Computer Science; Marfisi-Schottman, I., Bellotti, F., Hamon, L., Klemke, R., Eds.; Springer: Cham, Switzerland, 2020; Volume 12517. [Google Scholar] [CrossRef]
- Berta, R.; Kobeissi, A.; Bellotti, F.; De Gloria, A. Atmosphere, an Open Source Measurement-Oriented Data Framework for IoT. IEEE Trans. Industr. Inform. 2020, 17, 1927–1936. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. In Proceedings of the 1st Annual Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. Airsim: High-fidelity visual and physical simulation for autonomous vehicles. In Field and Service Robotics; Hutter, M., Siegwart, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 5, pp. 621–635. [Google Scholar]
- Rockstar Games, Grand Theft Auto V (GTA V). Available online: https://www.rockstargames.com/V/ (accessed on 6 May 2021).
- Mei, H.; Poslad, S.; Du, S. A Game-Theory Based Incentive Framework for an Intelligent Traffic System as Part of a Smart City Initiative. Sensors 2017, 17, 2874. [Google Scholar] [CrossRef]
- Poslad, S.; Ma, A.; Wang, Z.; Mei, H. Using a Smart City IoT to Incentivise and Target Shifts in Mobility Behaviour—Is it a Piece of Pie? Sensors 2015, 15, 13069–13096. [Google Scholar] [CrossRef]
- Law, F.L.; Kasirun, Z.M.; Wang, Z.; Mei, H. Gamification towards sustainable mobile application. In Proceedings of the IEEE Malaysian Conference in Software Engineering, Johor Bharu, Malaysia, 13–14 December 2011; pp. 349–353. [Google Scholar]
- Liimatainen, H. Utilization of fuel consumption data in an ecodriving incentive system for heavy-duty vehicle drivers. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1087–1095. [Google Scholar] [CrossRef]
- Ando, R.; Nishihori, Y.; Ochi, D. Development of a system to promote eco-driving and safe-driving. In Smart Spaces and Next Generation Wired/Wireless Networking; Springer: Berlin/Heidelberg, Germany, 2010; pp. 207–218. [Google Scholar]
- Cnali, R. Game Design for Eco Driving. Megamification. 2017. Available online: http://www.megamification.com/game-design-for-eco-driving/ (accessed on 17 May 2021).
- TechCrunch. In Efforts To Be Green, Ford Receives Patents For SmartGauge With EcoGuide. 2017. Available online: https://techcrunch.com/2011/03/17/in-efforts-to-be-green-ford-receives-patents-for-smartgauge-with-ecoguide/ (accessed on 17 May 2021).
- Cogan, R. Honda’s Eco Assist Makes You a More Efficient Driver. Green Car Journal. 2014. Available online: https://greencarjournal.com/top-stories/hondas-eco-assist-makes-you-a-more-efficient-driver/ (accessed on 17 May 2021).
- Godavarty, S.; Broyles, S.; Parten, M. Interfacing to the on-board diagnostic system. Vehicular Technology Conference Fall 2000. IEEE VTS Fall VTC2000. In Proceedings of the 52nd Vehicular Technology Conference (Cat. No.00CH37152), Bostong, MA, USA, 24–28 September 2000; Volume 4, pp. 2000–2004. [Google Scholar] [CrossRef]
- Bröring, A.; Remke, A.; Stasch, C.; Autermann, C.; Rieke, M.; Möllers, J. enviroCar: A Citizen Science Platform for Analyzing and Mapping Crowd-Sourced Car Sensor Data. Trans. GIS 2015, 19, 362–376. [Google Scholar] [CrossRef]
- Google Maps Reverse Geocoding. Available online: https://developers.google.com/maps/documentation/geocoding/start (accessed on 17 May 2021).
- Laukonen, E.G.; Passino, K.M.; Krishnaswami, V.; Luh, G.-C.; Rizzoni, G. Fault detection and isolation for an experimental internal combustion engine via fuzzy identification. IEEE Trans. Control. Syst. Technol. 1995, 3, 347–355. [Google Scholar] [CrossRef]
- Massoud, R.; Bellotti, F.; Berta, R.; De Gloria, A.; Poslad, S. Eco-driving Profiling and Behavioral Shifts Using IoT Vehicular Sensors Combined with Serious Games. In Proceedings of the 2019 IEEE Conference on Games (CoG); IEEE: New York, NY, USA, 2019; pp. 1–8. [Google Scholar] [CrossRef]
- 52north Envirocar Project. Available online: https://wiki.52north.org/Projects/EnviroCar (accessed on 17 May 2021).
- scikit-learn, Machine Learning in Python. Available online: https://sklearn.org/ (accessed on 17 May 2021).
- Vapnik, N.V. Statistical learning theory; Wiley-Interscience: New York, NY, USA, 1998. [Google Scholar]
- Shin, H.; Ch, O.S. Response modeling with support vector machines. Expert Syst. Appl. 2006, 30, 746–760. [Google Scholar] [CrossRef]
- Gunn, S.R. Support vector machines for classification and regression. ISIS Tech. Rep. 1998, 14, 5–16. [Google Scholar]
- Perrotta, F.; Parry, T.; Neves, L.C. Application of machine learning for fuel consumption modeling of trucks. In Proceedings of the 2017 IEEE International Conference on Big Data (Big Data); Institute of Electrical and Electronics Engineers (IEEE), Boston, MA, USA, 11–14 December 2017. [Google Scholar]
- Zeng, W.; Miwa, T.; Morikawa, T. Exploring trip fuel consumption by machine learning from GPS and CAN bus data. J. East. Asia Soc. Transp. Stud. 2015, 11, 906–921. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Rokach, L. Ensemble-based classifiers. Artif. Intell. Rev. 2010, 33, 1–39. [Google Scholar] [CrossRef]
- Karonis, D.; Lois, E.; Zannikos, F.; Alexandridis, A.; Sarimveis, H. A neural network approach for the correlation of exhaust emissions from a diesel engine with diesel fuel properties. Energy Fuels 2003, 17, 1259–1265. [Google Scholar] [CrossRef]
- Keras: The Python Deep Learning Library. Available online: https://keras.io/ (accessed on 17 May 2021).
- Bai, Y.; Wang, D. Fundamentals of fuzzy logic control-fuzzy sets, fuzzy rules and defuzzifications. In Advanced Fuzzy Logic Technologies in Industrial Applications; Springer: London, UK, 2006; pp. 17–36. [Google Scholar]
- Nasution, H.; Jamaluddin, H.; Syeriff, J.M. Energy analysis for air conditioning system using fuzzy logic controller. TELKOMNIKA Telecommun. Comput. Electron. Control 2011, 9, 139–150. [Google Scholar] [CrossRef]
- Massou, R.; Poslad, S.; Bellotti, F.; Bert, A.R.; Mehran, K.; De Gloria, A. A fuzzy logic module to estimate a driver’s fuel consumption for reality-enhanced serious games. Int. J. Serious Games 2018, 5, 45–62. [Google Scholar] [CrossRef]
- Massoud, R.; Bellotti, F.; Poslad, S.; Berta, R.; De Gloria, A. Exploring Fuzzy Logic and Random Forest for Car Drivers’ Fuel Consumption Estimation in IoT-Enabled Serious Games. In Proceedings of the 2019 IEEE 14th International Symposium on Autonomous Decentralized System (ISADS); Institute of Electrical and Electronics Engineers (IEEE), Utrecht, The Netherlands, 8–10 April 2019. [Google Scholar]
- Massoud, R.; Bellotti, F.; Poslad, S.; Berta, R.; De Gloria, A. Towards a Reality-Enhanced Serious Game to Promote Eco-Driving in the Wild. In Proceedings of the International Conference on Games and Learning Alliance, Athens, Greece, 27–29 November; pp. 245–255.
- OpenStreetMap Homepage. Available online: http://www.openstreetmap.org (accessed on 17 May 2021).
- Fiat eco:Drive, Uconnect. Available online: https://www.driveuconnect.eu/it/features/dettagli-ecodrive (accessed on 17 May 2021).
- Khedkar, S.; Oswal, A.; Setty, M.; Ravi, S. Driver evaluation system using mobile phone and OBD-II system. Int. J. Comput. Sci. Inf. Technol. 2015, 6, 2738–2745. [Google Scholar]
- Poslad, S.; Hamdi, M.; Abie, H. Adaptive security and privacy management for the internet of things (ASPI). In Proceedings of the ACM Conference on Pervasive and Ubiquitous Computing Adjunct Publication, New York, NY, USA, 8–12 September 2013; pp. 373–378. [Google Scholar]
- Jensen, C.D.; Poslad, S.; Dimitrakos, T. (Eds.) Proc. 2nd Int. Conf. on Trust Management (iTrust) Lecture Notes in Computer Science (LNCS) 2995; Springer-Verlag: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Zuboff, S. The Age of Surveillance Capitalism: The Fight for a Human Future at the New Frontier of Power; PublicAffairs: New York, NY, USA, 2019. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event Detector | Value | Classification |
|---|---|---|
| Small | 0.1 to 0.3, light blue | −0.1 to −0.3, light coral (shade of orange) |
| Medium | 0.3 to 0.5, mid blue | −0.3 to −0.5, mid coral |
| Large | 0.5 to 1, dark blue | −0.5 to −1, dark red |
| No correlation | 0, white | 0, white |
| Predictor Group | Variables | Notes |
|---|---|---|
| Related to car characteristics | Car manufacturer; car model; car construction year; engine displacement | - |
| Read from the car’s internal sensors (OBD-II scanner) | Engine load, “%” | Indicates the amount of air and fuel being sucked into the engine |
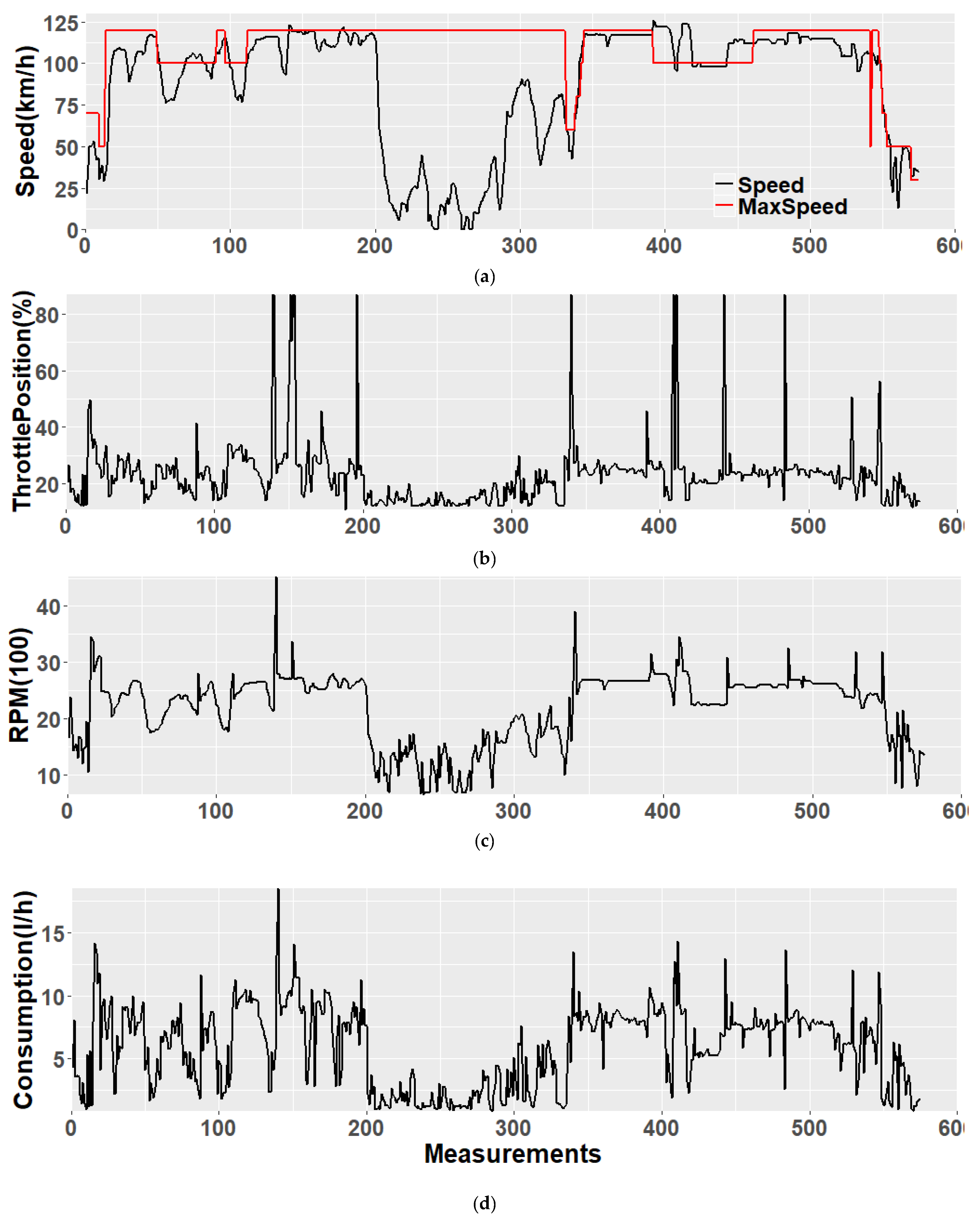
| Speed, “km/h” | The actual speed of the vehicle shown by the odometer (when there is no readable value from the speed sensor, we rely on the GNSS derived speed): speed burns fuel | |
| Intake-air temperature, “c” | Senses the air temperature inside the cylinders into the engine. This information is provided to the ECU for correcting the mixture formation and the ignition to determine the correct amount of fuel needed for optimum engine performance and economic outcomes | |
| Number of engine revolutions per minute (RPM) | Fuel consumption is typically related to high RPM [43]. Optimal RPM depends on the vehicle’s engine characteristics and on the road slope as well | |
| Throttle position sensor (TPS) or accelerator, “%” | Regulates the engine’s air and fuel intake. It is directly controlled by the driver, thus representing a fundamental element for comprehensible feedback and coaching | |
| MAF “L/s” | Presented above | |
| Intake manifold absolute pressure (MAP) | Used by the ECU to compute the MAF | |
| Computed post-hoc and added on the community’s server | FC “L/h” | Described in Section 4 |
| Calculated MAF “g/s” | For the cases when the OBD adapter delivers no result for MAF [44] | |
| Track’s length | Track traveled distances in kilometers | |
| Embedded sensors in Smartphone and timestamp data | GNSS speed | (When OBD-II adapter delivers no result for speed, the GNSS speed value is considered in this work) and the time of day (in hours) |
| Indicators | Estimation | Driver’s Feedback | ||
|---|---|---|---|---|
| RPM | TPS | Speed | FC | |
| L | H | H | VH | Shift down the gear (and raise the accelerator pedal) |
| L | H | VH | H | Shift down the gear and raise the accelerator pedal |
| H | M | H or VH | H | Shift up the gear (and reduce speed) |
| H | M | M | H | Shift up the gear |
| H | H | H | Shift up the gear (and raise the accelerator pedal) | |
| VH | M | H | Shift up the gear | |
| VH | H | VH | Shift up the gear | |
| Performance Metric | SVR | RF | ANN |
|---|---|---|---|
| MSE | 0.06 | 0.02 | 0.05 |
| R2 | 0.98 | 0.99 | 0.98 |
| Training time (min) | 154 | 12 | 117 |
| Inference time (ms) | 1 | 27 | 0.28 |
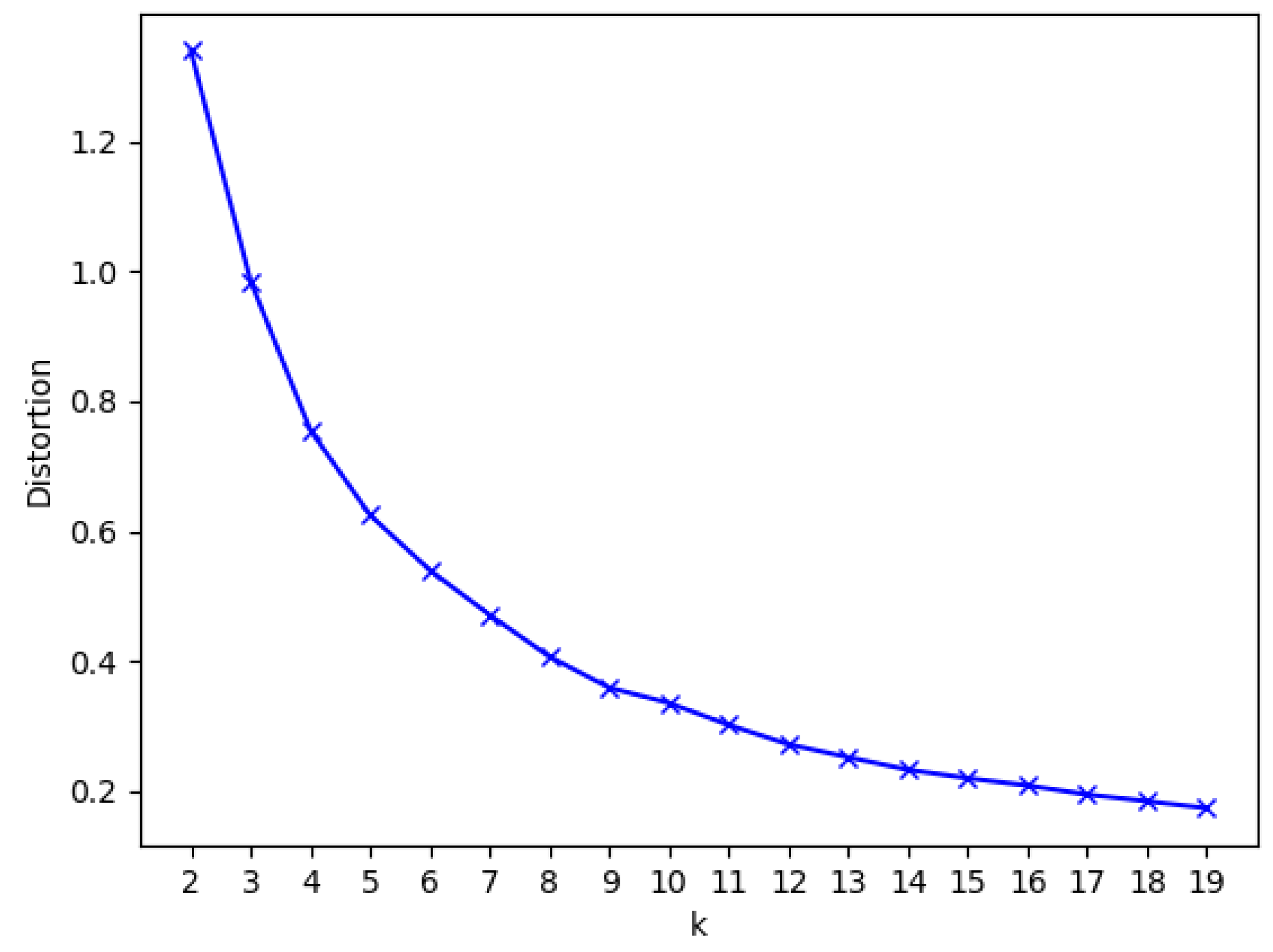
| k | Centroids (L/h) |
|---|---|
| 5 | 1.76, 4.35, 6.93, 9.04, 11.91 |
| 9 | 1.37, 2.65, 4.15, 5.68, 7.17, 8.46, 9.73, 11.45, 14.84 |
| Event Detector | Value | Classification |
|---|---|---|
| RPM | 4530 | VH |
| Speed/OSM speed | 117.36/120 km/h | H, respect the speed limit |
| TPS | 87% | H |
| Driving Recommendation | ||
| “Shift-up the gear” | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massoud, R.; Berta, R.; Poslad, S.; De Gloria, A.; Bellotti, F. IoT Sensing for Reality-Enhanced Serious Games, a Fuel-Efficient Drive Use Case. Sensors 2021, 21, 3559. https://doi.org/10.3390/s21103559
Massoud R, Berta R, Poslad S, De Gloria A, Bellotti F. IoT Sensing for Reality-Enhanced Serious Games, a Fuel-Efficient Drive Use Case. Sensors. 2021; 21(10):3559. https://doi.org/10.3390/s21103559
Chicago/Turabian StyleMassoud, Rana, Riccardo Berta, Stefan Poslad, Alessandro De Gloria, and Francesco Bellotti. 2021. "IoT Sensing for Reality-Enhanced Serious Games, a Fuel-Efficient Drive Use Case" Sensors 21, no. 10: 3559. https://doi.org/10.3390/s21103559
APA StyleMassoud, R., Berta, R., Poslad, S., De Gloria, A., & Bellotti, F. (2021). IoT Sensing for Reality-Enhanced Serious Games, a Fuel-Efficient Drive Use Case. Sensors, 21(10), 3559. https://doi.org/10.3390/s21103559