3.2. Parametric Model Validation
This section validates the developed rain area detection and correction technique using the independent validation datasets for both the daytime and nighttime and the entire evaluation period. First, the point to pixel validation of the model results using the gauge station data is presented. Next, the developed rain area correction technique is described and demonstrated for two selected daytime (on 14 April 2018 11:00 UTC) and nighttime (on 6th March 2018 17:00 UTC) periods from the validation dataset due to the variety of detected rain areas present in the scene. Finally, both the model detected rain areas and rain rate are compared with the GPM IMERG satellite rainfall product results to validate the model spatially.
- (I)
Point validation of the parametric model’s rain area
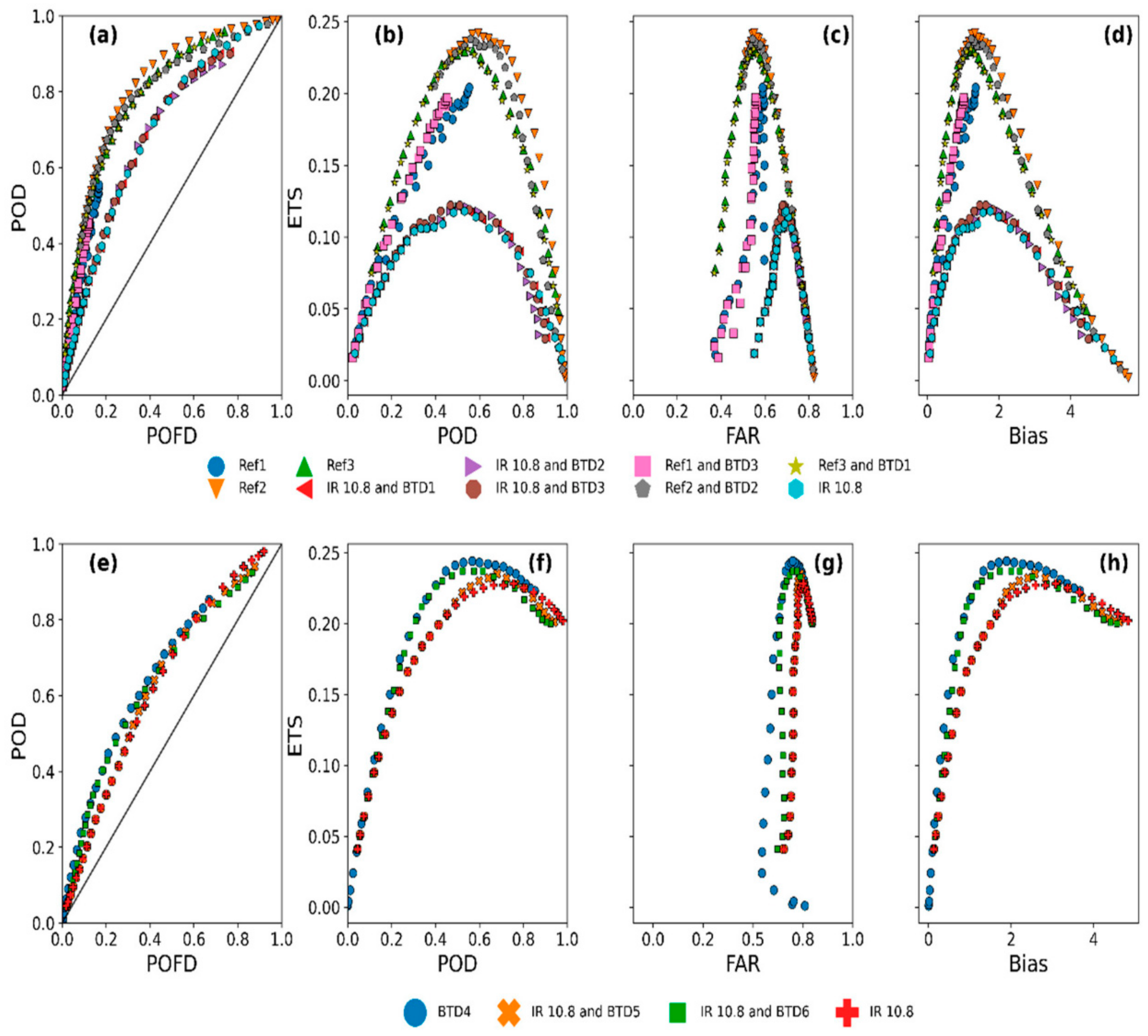
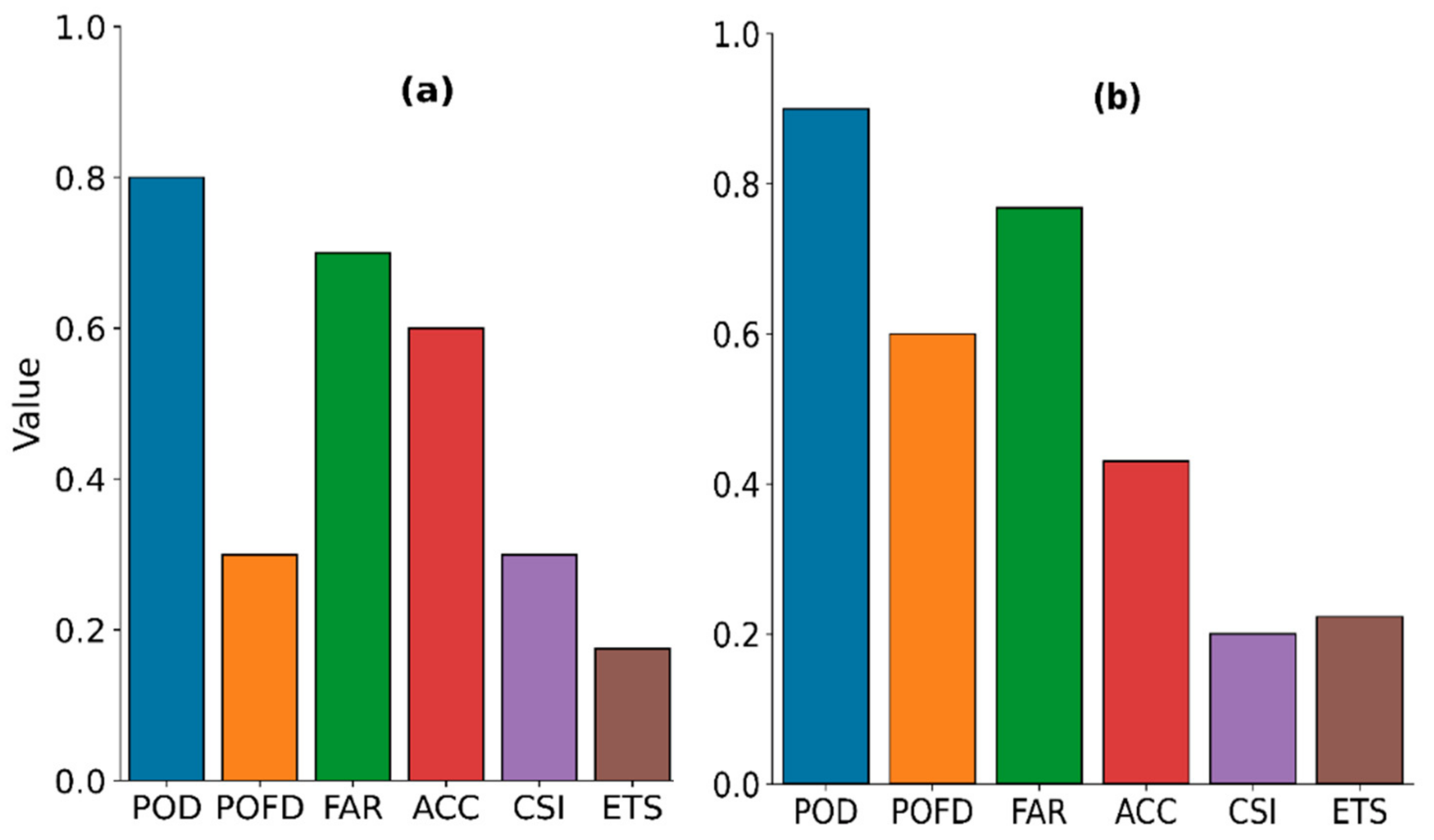
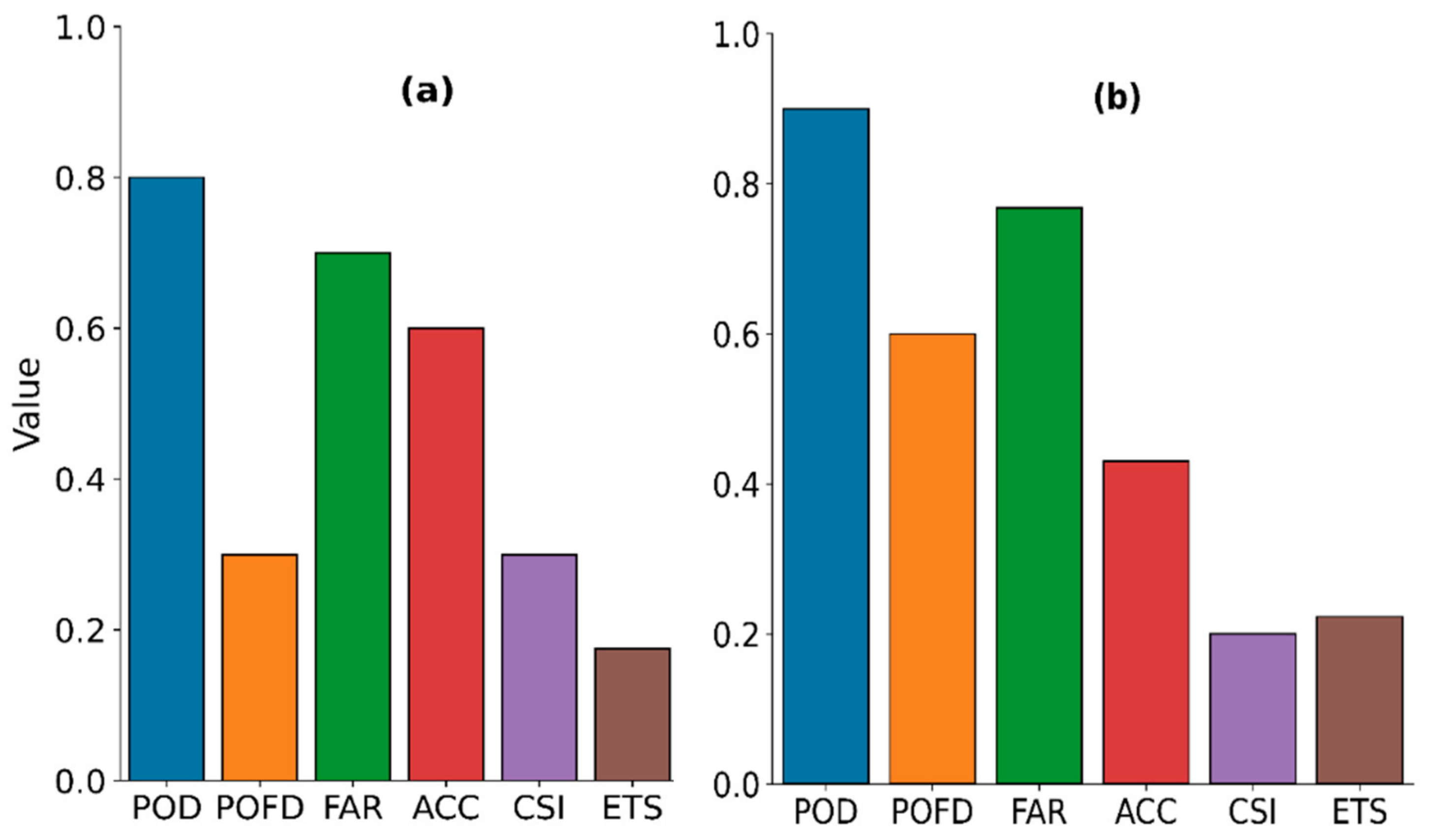
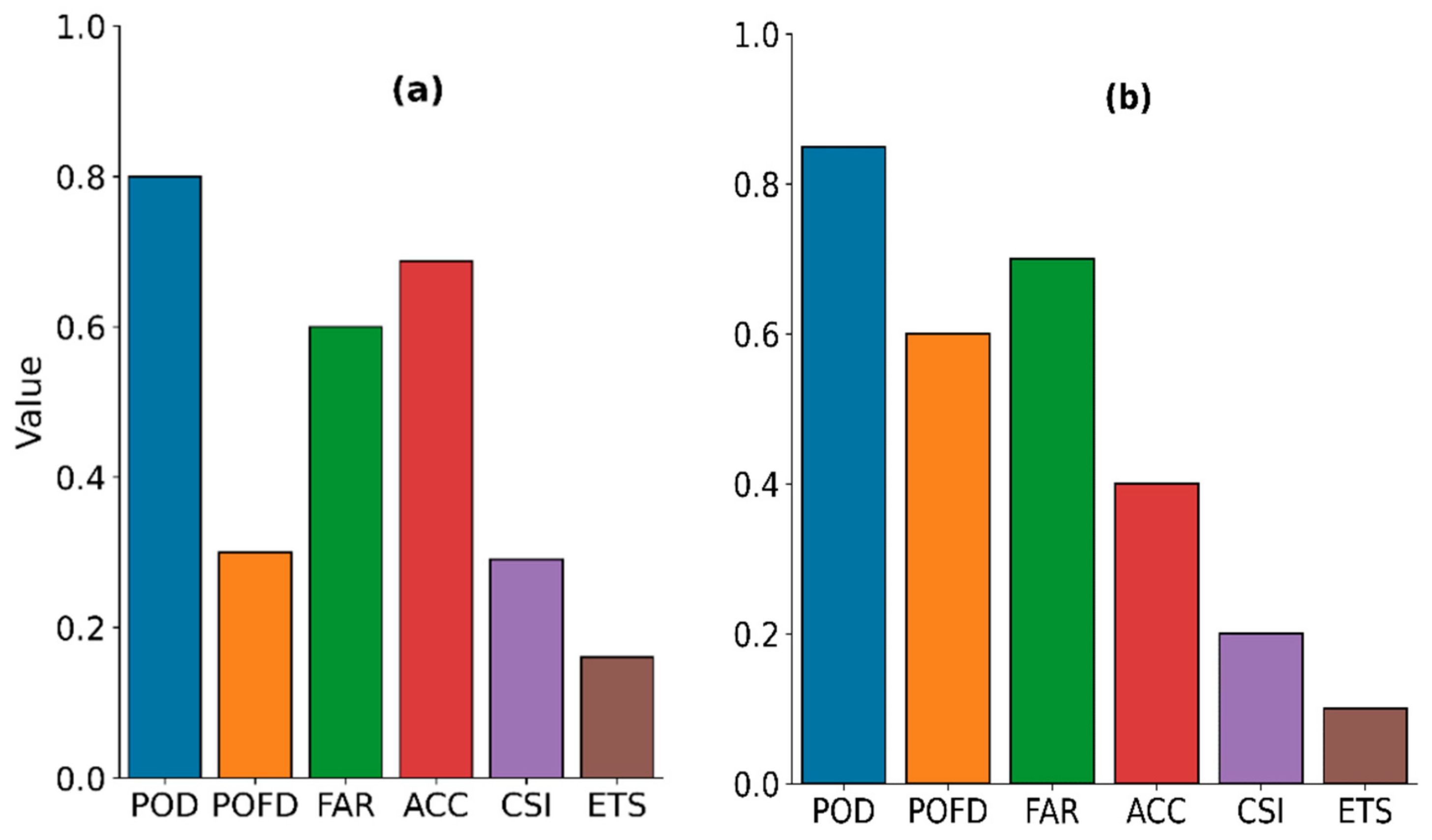
Figure 7 presents the categorical scores of rain area detection, indicating the best rain detection models’ performance when the model results were compared with the daytime (
Figure 7a) and nighttime (
Figure 7b) gauge station data. The results show improved daytime detection, indicated by high ACC, low FAR and a marginal increase in bias (2.3) scores compared to the calibration scores. However, the low ETS and high bias (4.11) scores, compared to its previous calibration scores, suggest a decreased model performance for the nighttime.
- (II)
The rain area correction scheme
Corrections were applied to the detected rain areas because the indirect relationship between rain and the inferred cloud top properties from the satellite often results in retrieval uncertainties [
66]. Moreover, both the point validation of the initial rain area detection results (shown above) and its preliminary comparison with the results from EUMETSAT’s Multisensor Precipitation Estimate (MPE) [
67,
68] (not used in this study) and GPM IMERG (used in this study) showed high FAR and comparatively extensive raining areas, respectively, which required corrections. Below is a summary and results that detail the implementation of the correction technique.
This study implemented rain area correction for only the validation data because of the large number of datasets. The correction scheme relies on adaptive parametric thresholds applied to spectral characteristics from the detected rain area. This implies that for each classification scene and detected rain area, the applied corrections were based on scene and rain area-specific parameters. They were more precisely derived from the gradient in the spectral characteristics computed for each rain area, i.e., the identified raining cloud object (cloud object gradient) and each pixel (pixel gradient) in a cloud object. These two kinds of gradients differ for daytime and nighttimes due to the different data and information content used for the rain area detection. Nonetheless, their implementations are for the same purpose during day and night.
Cloud objects gradient aim to reduce the number of detected rain areas by combining the gradient computed for each cloud object (i.e., the detected raining area) with the average gradient and standard deviation from all cloud objects to locate non-raining areas previously classified as raining in the initial results. The number of detected rain areas herein refers to the number of areas (of different sizes) identified by the parametric model as raining. The pixel gradient is resulting in a reduction of the size of the cloud object because it compares the gradient computed for each pixel in a cloud object to its median and average median (from all cloud objects) to locate the non-raining high/low gradient (depending on the day/night application) pixels in the initial results.
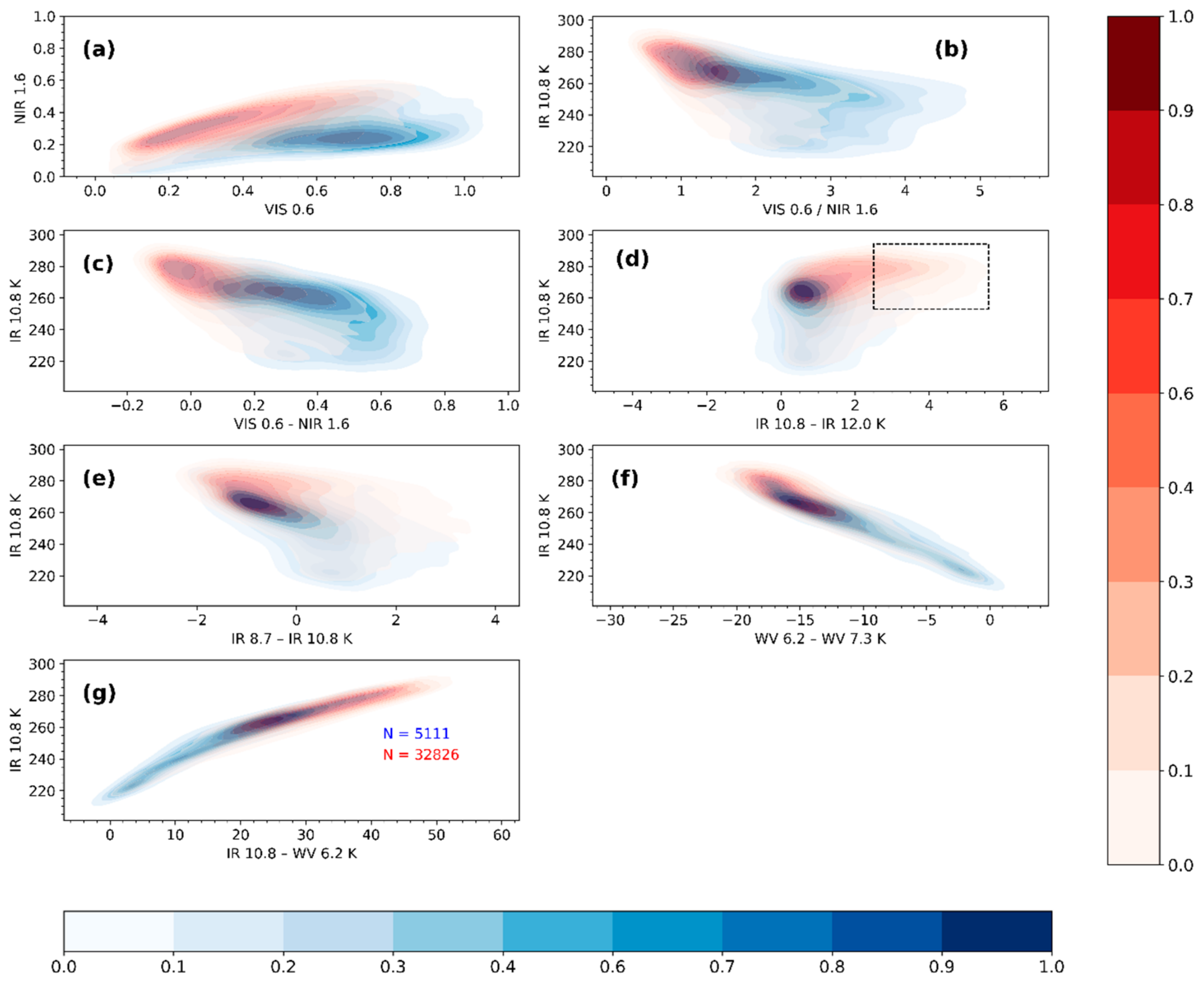
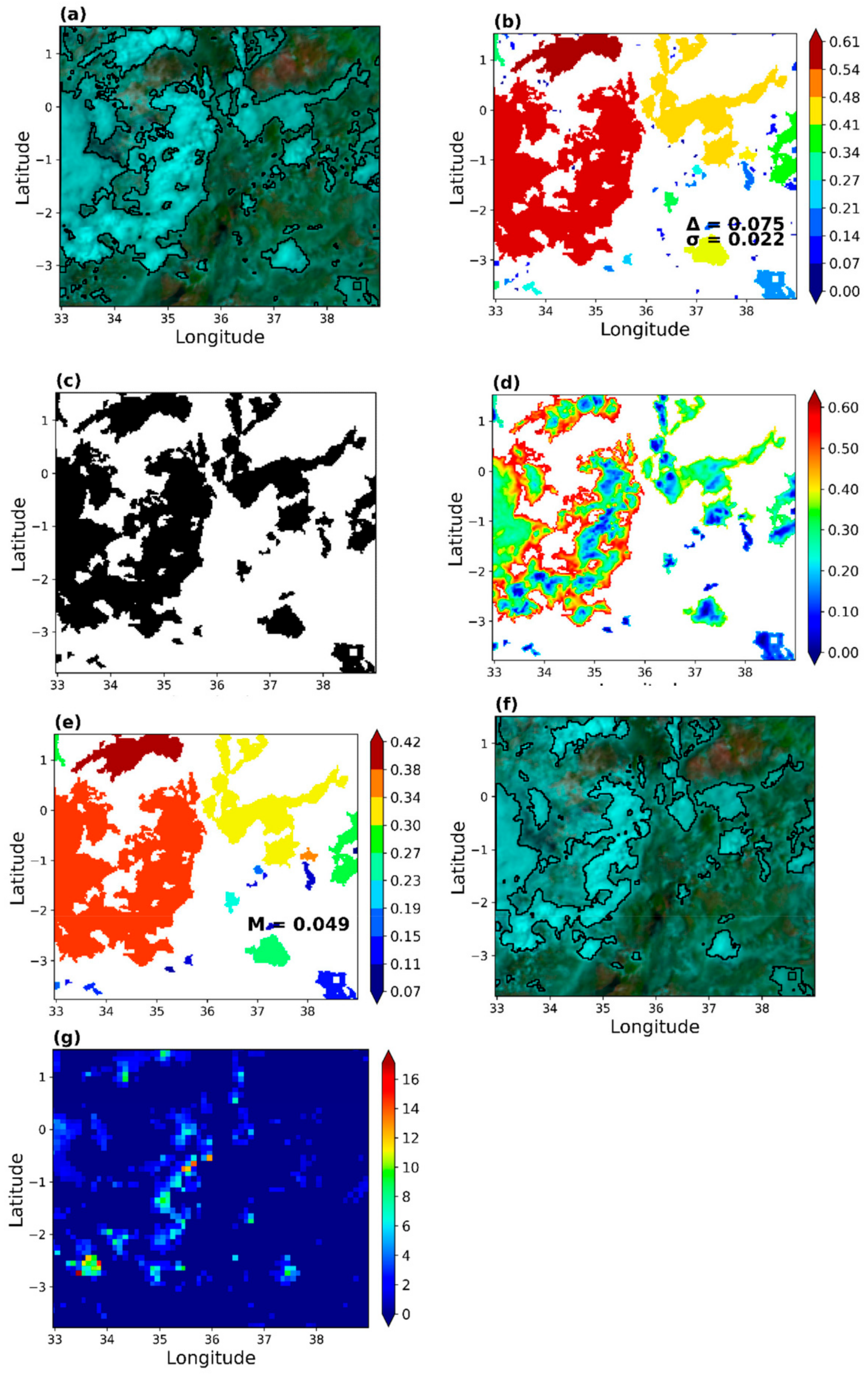
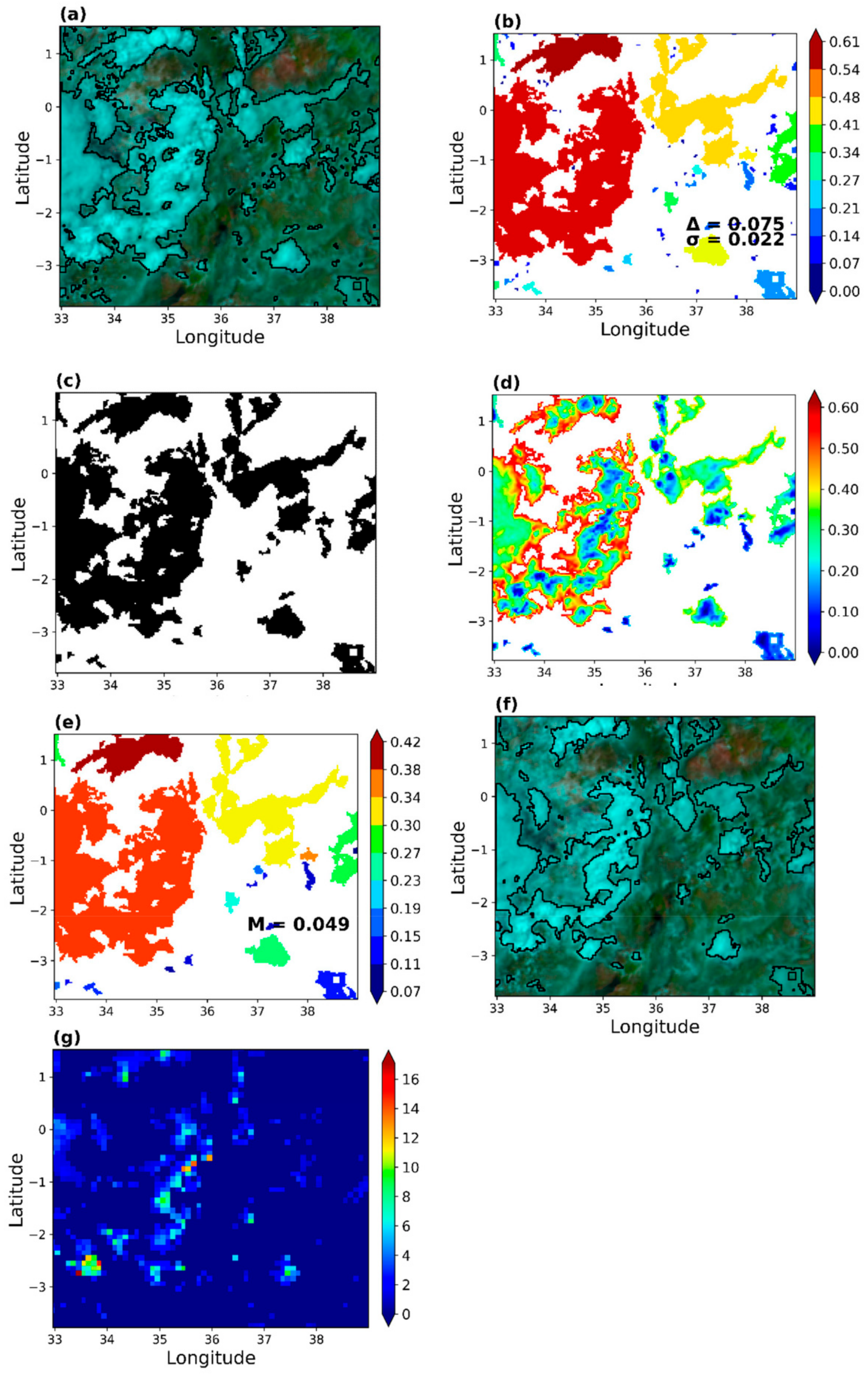
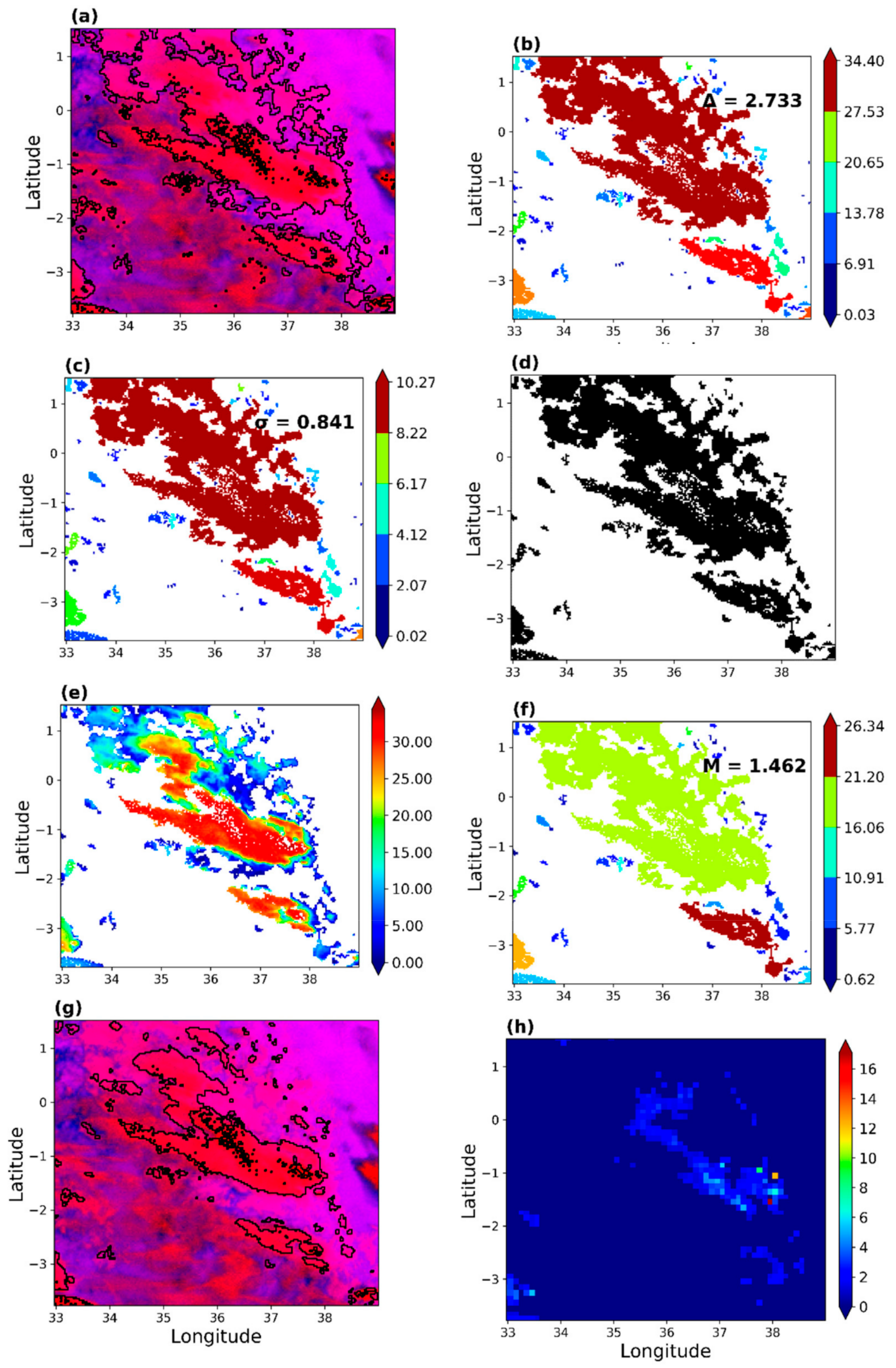
Figure 8 demonstrates the implementation of the daytime rain area correction scheme. The best daytime model was determined to be the VIS0.6
NIR1.6 parametric model (Ref 3). As was shown in
Section 3.1.1 (
Figure 3c), the raining spectral characteristics (i.e., those sampled when rainfall in the gauge was equal to or above 1 mmh
−1) were mainly above 0.2, suggesting that higher differences correspond to high rain probabilities.
Figure 8a is a Daytime Natural Colour RGB [
69] composite of SEVIRI NIR1.6, VIS0.8 and VIS0.6 µm channels, respectively, over the study area. High reaching clouds with ice tops, e.g., cumulonimbus type clouds, appear cyan in the figure. Black lines demarcate the raining areas initially detected by the developed daytime parametric model. The cloud object gradient (
Figure 8b) represents an area-specific gradient computed (for each detected raining area in
Figure 8a) as the maximum reflectance difference (max(VIS0.6–NIR1.6)) of each cloud objects minus its minimum (min(VIS0.6–NIR1.6)). The cloud object gradient is combined with the average gradient (Δ) and standard deviation (σ), both indicated in
Figure 8b, to identify non-raining areas in the initial results and thus reduce the number of detected ted cloud objects (
Figure 8c).
The pixel gradient (
Figure 8d) was computed for each cloud object in
Figure 8c as max (VIS0.6-NIR1.6) minus the pixel value. Thus, the low gradients in
Figure 8d correspond with high VIS0.6–NIR1.6 differences, whereas the high gradients are the low differences. These gradients, combined with the median pixel gradient (
Figure 8e) for each cloud object and the average of the median (M) pixel gradient from all cloud objects, identify and reclassify high gradient pixels as non-raining. The result is a reduction in the detected rain area’s size, as shown in the RGB colour composite in
Figure 8f.
Figure 8g is the GPM IMERG rainfall estimate over the study area. Comparing the initial results in
Figure 8a–f (the corrected version) and the rainfall estimates in 8g, it is evident that the correction scheme can improve the initial results to estimates that are comparable with the GPM IMERG satellite estimates.
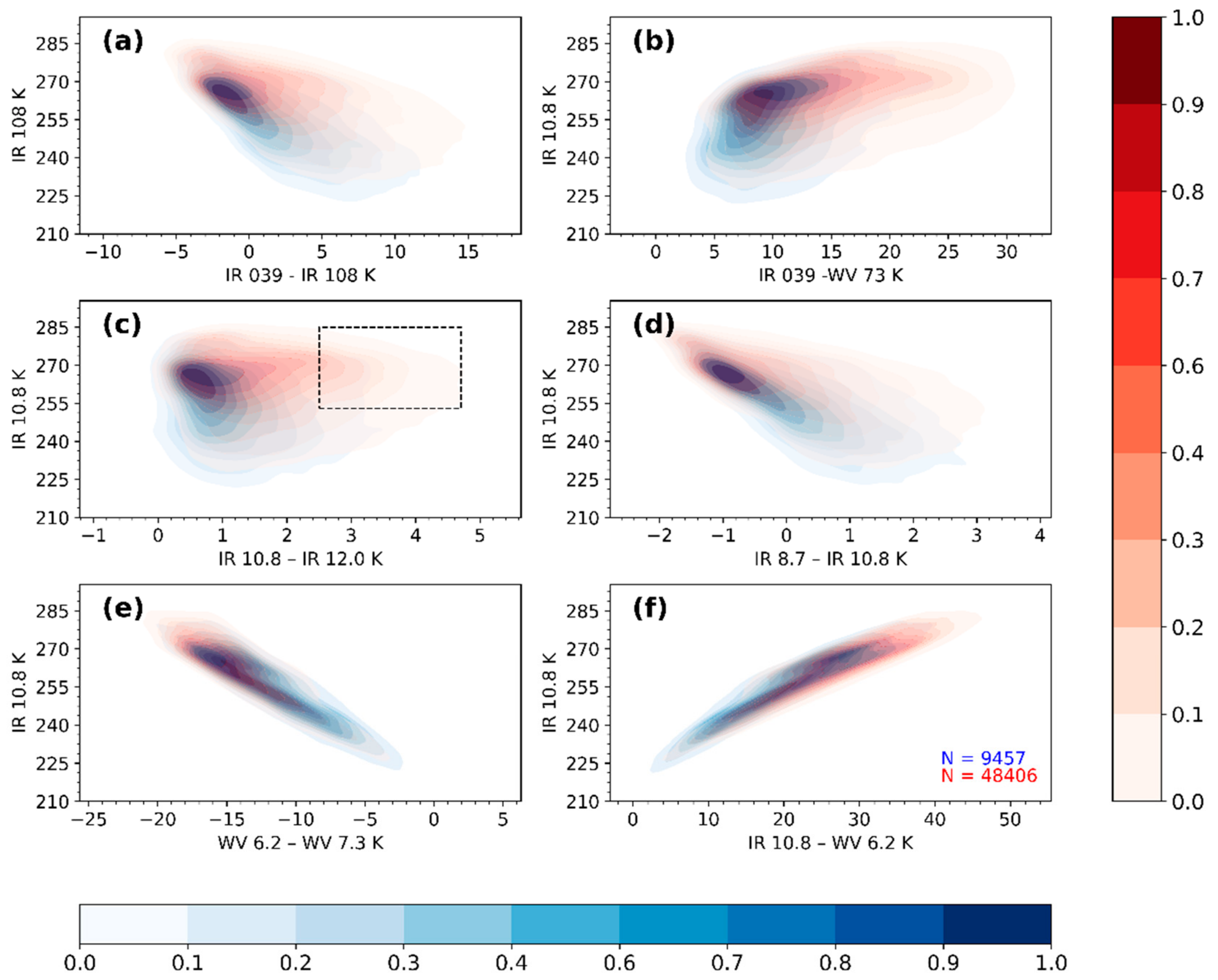
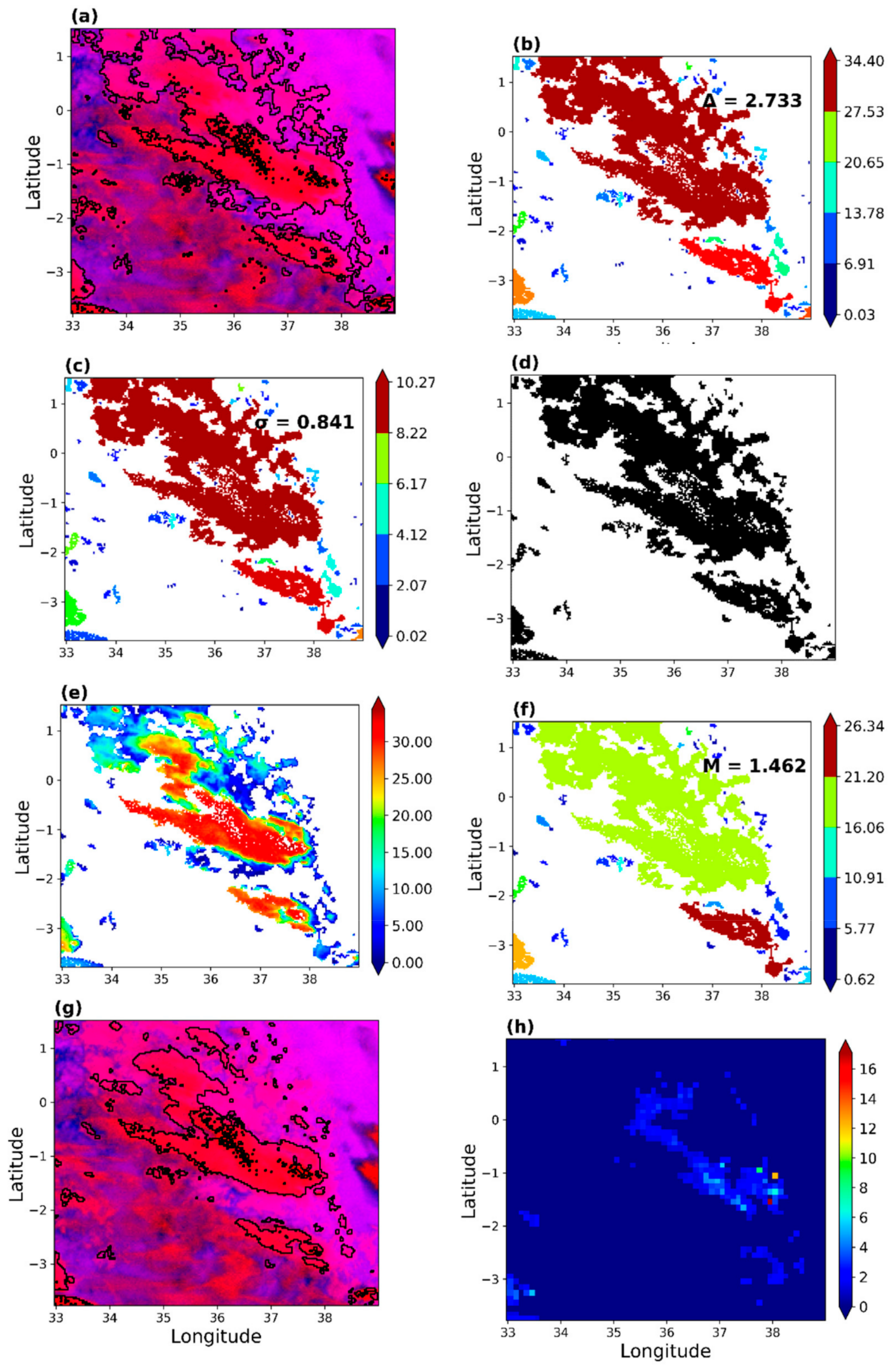
Figure 9 demonstrated rain area correction for the nighttime. Unlike the daytime, nighttime rain detection was based on a combination of IR3.9–IR10.8, IR3.9–WV7.3 and IR10.8–WV6.2 BTD (BTD4). Here, the rain area-specific parameters used in correcting the detected rain areas were from IR10.8–WV6.2 K to reduce redundancy in the data used for the correction.
Figure 3g and
Figure 4f indicate that most of the raining spectral characteristics of the IR10.8–WV6.2 are less than 30 K (in
Table A1 and
Table A3, on average, 75% are <26 K), suggesting that low differences indicate high rain probabilities.
Figure 9a is a Nighttime Microphysics RGB colour composite of SEVIRI IR12.0 –IR10.8 µm and IR10.8–IR3.9 µm channel differences, and IR10.8 µm channel, respectively, over the study area. Detailed colour interpretation is provided in [
69]; of interest is the reddish-brown areas that indicate optically thick ice clouds. The initially detected rain areas by the nighttime parametric model are demarcated in black. The cloud object gradient (
Figure 9b) and Δ were computed similarly to the daytime. The cloud object standard deviation in
Figure 9c and the σ (shown in
Figure 9c) represents an area-specific standard deviation and σ of the IR10.8–WV6.2 BTD for the detected raining area. Combined with
Figure 9b, they were used to reduce the number of detected cloud objects as shown in
Figure 9d, similar to the daytime approach. The pixel gradient in the IR10.8–WV6.2 BTD for the areas in
Figure 9d is also shown in
Figure 9e. It was computed similar to the daytime approach. Thus, the high gradient area corresponds to the low IR10.8–WV6.2 BTD and vice versa. The median pixel gradient and the M shown in
Figure 9f were derived from the raining areas in
Figure 9e. They were used to reduce the sizes of the detected rain areas, as shown in
Figure 9g.
Figure 9h is the rainfall estimate from the GPM IMERG; its comparison with the initial and final (the corrected version) rain areas result (
Figure 9a,g, respectively) provided a better perspective of the effect of the developed correction scheme similar to the daytime.
- (III)
Spatial validation of the parametric model’s rain area and rate
Figure 10 is an “eyeball” verification of the corrected rain areas (
Figure 8f and
Figure 9g) compared with the initial rain areas detections (
Figure 8a and
Figure 9a, lime green demarcations) and detections by the GPM IMERG (white demarcations) for the daytime and nighttime in an RGB colour composite to validate the developed parametric model spatially. The daytime comparison in
Figure 10a shows a convincing agreement in the detected rain areas’ spatial dynamics by the model and IMERG. For instance, areas between latitudes 0 to −2 and longitude 34 to 36 show a good spatial match in rain areas. These observations correlate with the high POD, ACC and CSI scores observed for the daytime in the previous validation, thus indicating high confidence in the model results.
Nevertheless, there are some differences in
Figure 10a. IMERG detects more rainy areas (of varying sizes) than the developed model. Instead, the raining rain areas detected by the model are mainly organised into large areas and fewer in number. Additionally, a close inspection of
Figure 10a reveals a slight shift in the detected rain areas by IMERG relative to the model.
Figure 10b is an analogous comparison of
Figure 10a but for the nighttime. Compared to IMERG, the corrected rain areas’ spatial dynamics shows good agreement, especially for the large rain areas. However, the figure also shows that the nighttime detection shows some tendency to detecting more rainy areas than IMERG, which may explain the high POFD, low ACC and high bias scores observed in the previous validation. Moreover, the spatial shift in the detected rain areas of IMERG relative to the parametric model observed for the daytime is again noticeable.
The differences in rain areas detected by IMERG and the parametric model were mainly attributed to factors such as differences in the native resolution of the model dataset and IMERG. The spatial and temporal aggregation method used to match the two datasets could also further contribute to these differences.
Table 8 presents descriptive statistics of the detected rain areas’ spatial properties; herein, the number and size (i.e., the area in km
2) for the uncorrected parametric model, corrected parametric model, and IMERG. The number of detected rain areas expresses the average count of all detected rain clouds, the 50% percentile, 75% percentile and standard deviation per 30 min validation timestep. On the other hand, the area in
Table 8 expresses the average size, 50% percentile, 75% percentile and standard deviation of the clouds detected per 30 min validation timestep. Based on the
Table 8 results, IMERG, on average, detects a comparatively smaller number of rain clouds of large sizes than the parametric model, which may be because of IMERG’s larger native spatial resolution than the model.
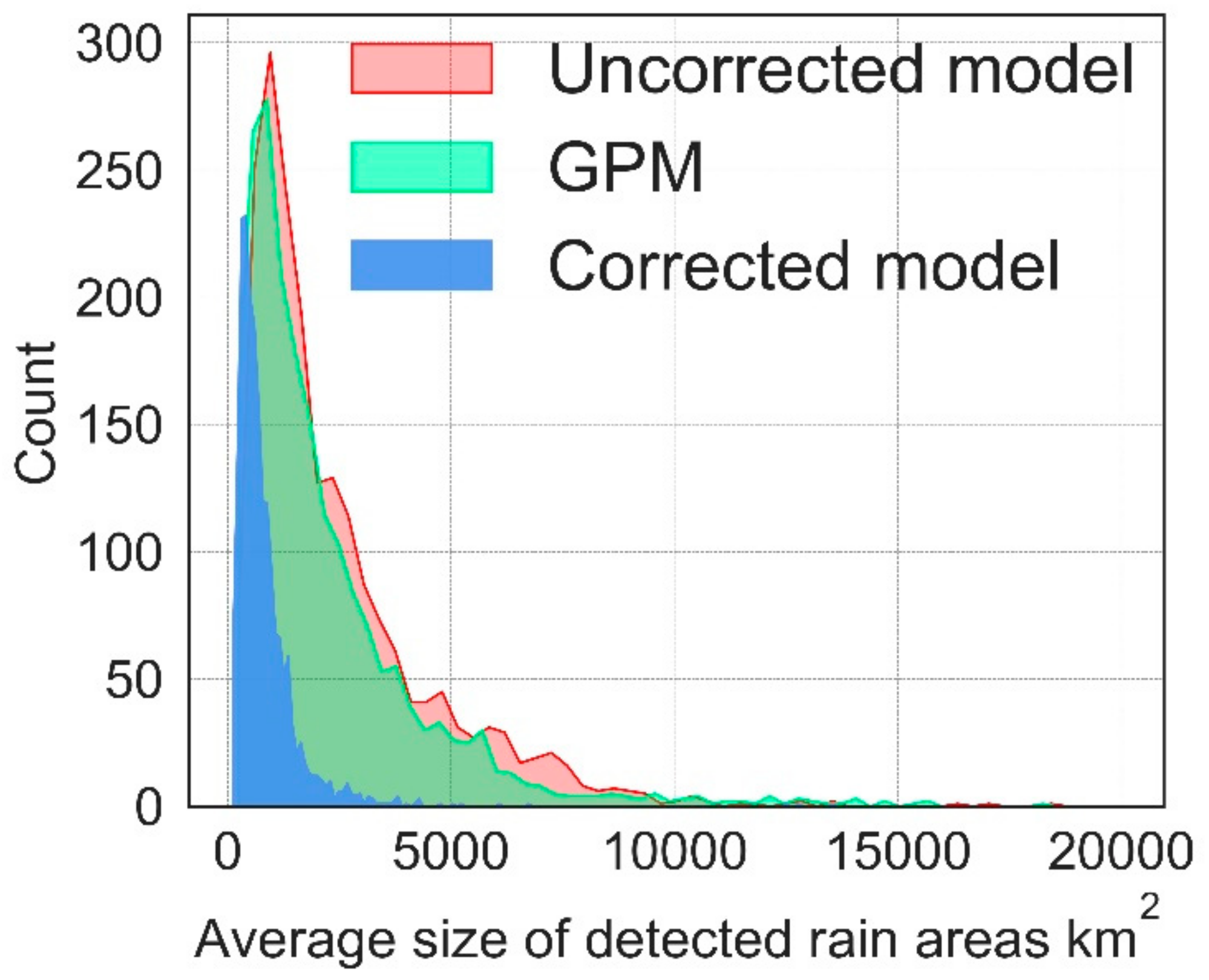
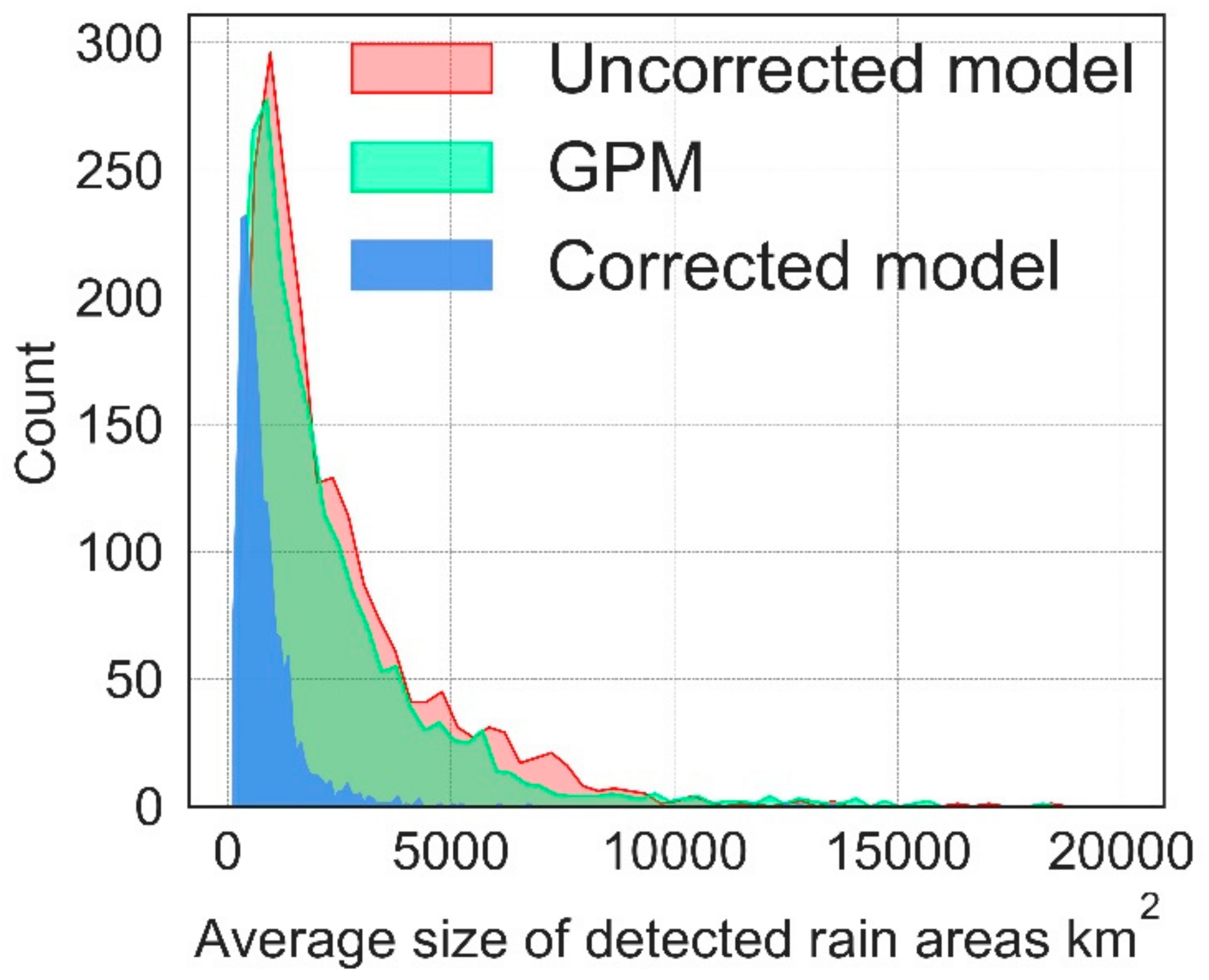
Figure 11 compares the average sizes of the parametric model’s detected rain areas before and after correction to rain areas from IMERG for the entire validation period. The figure shows the average detected rain area for sizes ranging from 81 to 20,000 km
2 because it constitutes most of the detected rain area sizes, and it allows for a clear visual comparison.
In general, the initial model results detected extensive rain areas of varying sizes. Nonetheless, the implemented correction technique was effective in reducing the number and sizes of the detected rain areas. From visual inspection of uncorrected and corrected detected rain areas, the daytime rain area correction mainly occurred at the fringes of initially detected large contiguous raining areas, whereas the small areas were mainly reclassified non-raining. On the contrary, the nighttime implementation showed that large areas initially flagged as raining were reclassified as non-raining.
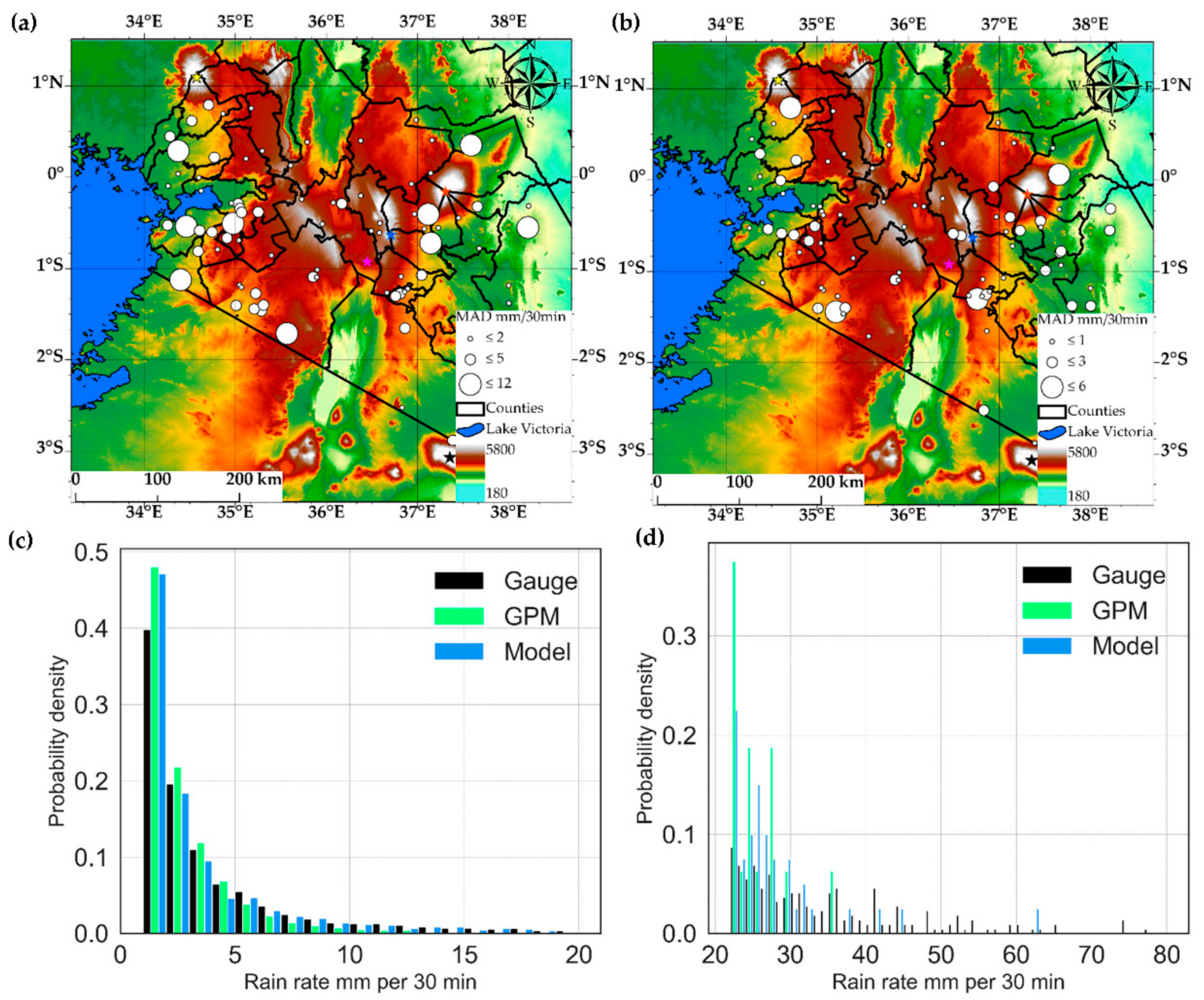
Figure 12 compares the gauge stations’ detected rain rates to those detected by the parametric model and IMERG for the entire validation period, using absolute differences and probability densities.
Figure 12a,b are the absolute differences between the mean rain rates detected at each gauge station by the parametric model and IMERG compared separately for the daytime and nighttime, respectively. The probability densities of the rain rates from the gauge, IMERG and parametric model were also compared for rain rates below and above 20 mmh
−1 (
Figure 11c,d) for the entire validation period to evaluate the models’ detected rain rates against the actual observations) and IMERG.
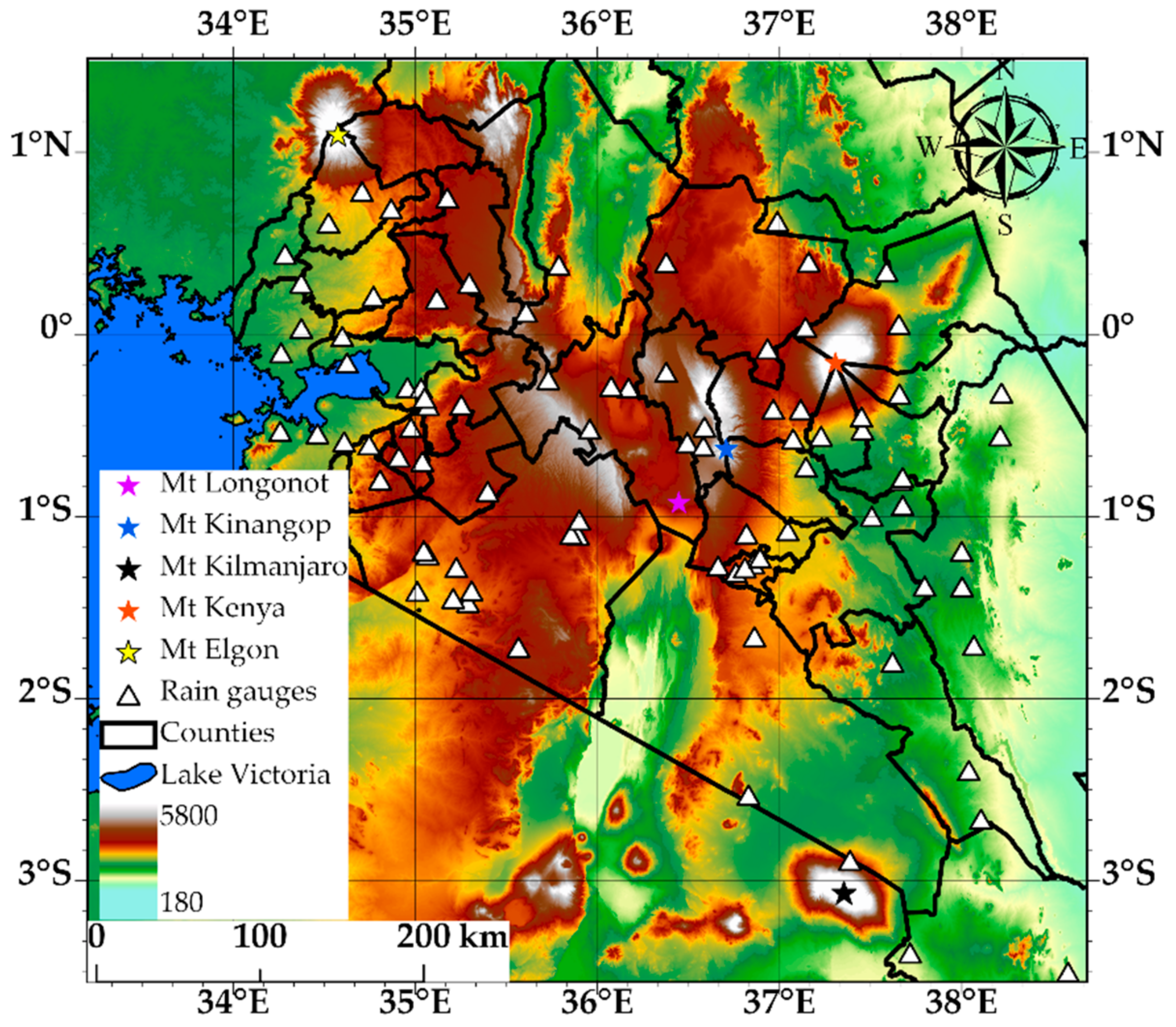
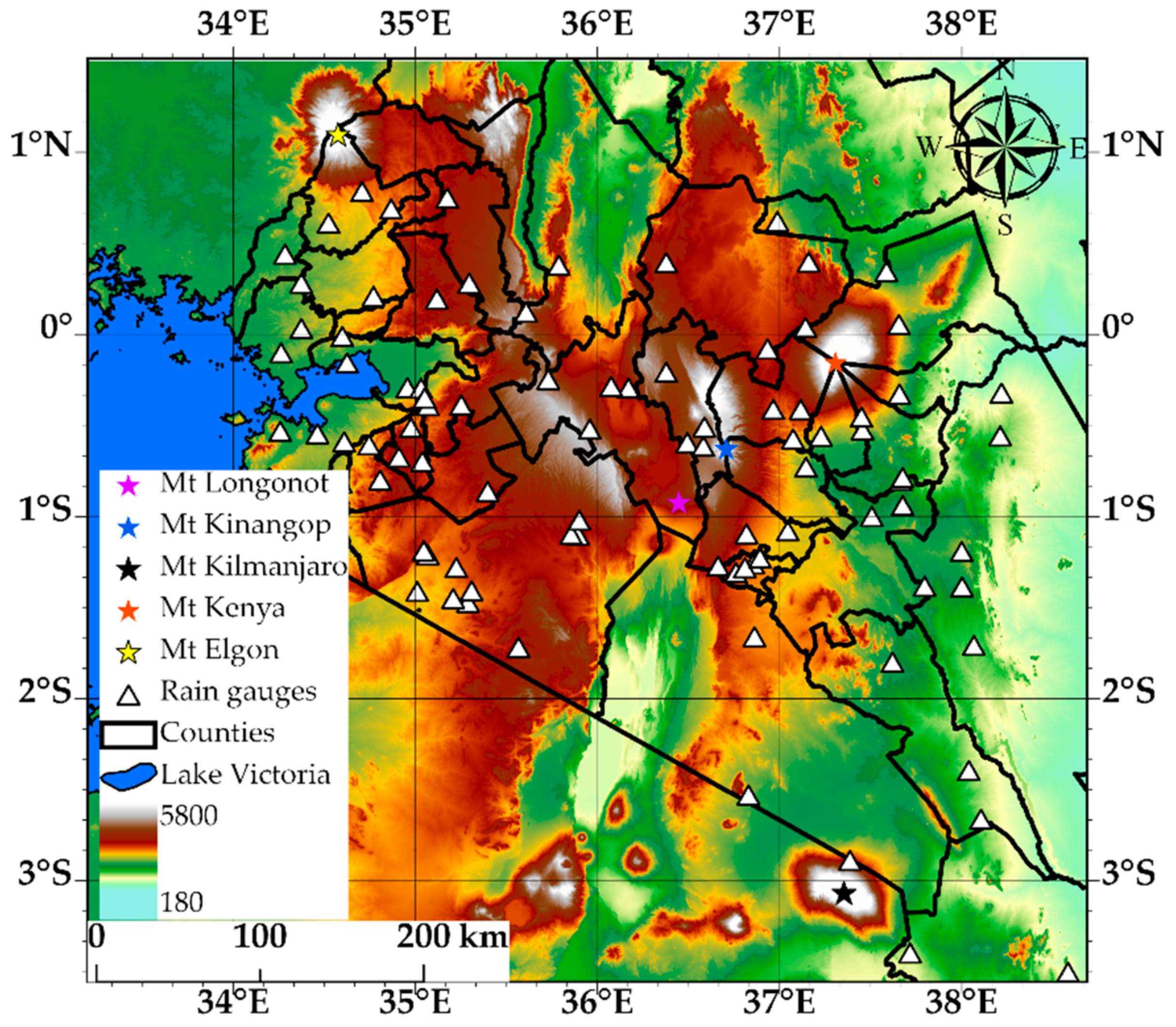
Figure 12a shows spatially varying daytime mean differences especially around mountainous areas (e.g., between Mount Kenya and Kinangop) and Lake Victoria, where the highest differences (<12 mmh
−1 on average) were observed. These areas coincide with areas previously identified with high spatially varying rain rates [
49,
70] and differences between satellite and gauge rain rates [
1,
71] which may be due to the extreme precipitation observed in these areas [
72] and the influence of orography and large water body on rainfall variability [
24,
71,
73]. In particular, mountains pose a unique challenge to PMW rainfall retrievals because their rainfall signal over land mainly comes from ice hydrometeors from convective clouds, which for orographic rain, may not produce much ice aloft and thus, may lead to underestimation of the surface rainfall [
73]. A process-based analysis of the IMERG precipitation datasets using cloud top properties sampled from rain gauge and IMERG rainy episodes [
61] showed that IMERG frequently misinterprets the warm rains. The authors attributed this to the oversensitivity of IMERG for the low cloud optical thickness and effective radius. The fact that IMERG estimate rainfall from multiple PMW estimates from the GPM constellation could explain the notable differences between the detected rain rates, particularly in the mountainous areas. However, comparatively low elevation areas, notably within the Rift Valley, show low differences instead, probably, due to the low rain rates observed in these areas [
49]. The mean differences compared in
Figure 12b for the nighttime show similar spatial variability to the daytime, although the differences are comparatively lower than during the daytime.
Figure 12c shows comparable probability densities of the detected rain rates by the gauge, model and IMERG for rain rates below 20 mm per 30 min interval. By contrast, the densities for the above 20 mm rain rates compared in
Figure 12d shows that IMERG’s maximum detected rain rate was below 40 mm. On the other hand, the model detections were mainly comparable to the ground truth and above 50 mm per 30 min, suggesting that IMERG has a low tendency to detect very high rain rates. The model’s comparable detected rain rates with the ground truth is because it was calibrated using a dense rain gauge network. IMERG’s low tendency to detecting very high rain rates may be due to the spatial and temporal averaging technique used to merge and intercailibrate rainfall estimates from several PMW sources.
Based on the results, it can be stated that the developed rain area detection and correction technique using multispectral data from the MSG SEVIRI was successful in detecting rain areas at 2 scales: (1) at point and pixel scale when the detected rain areas were compared with gauge station data, and (2) at a large scale when compared to the spatial dynamics of rain areas detected by IMERG. Furthermore, retrieval and comparison of the model, IMERG, and gauge rain rates reveal the model’s capability to detect rain rates comparable to rain gauge data and with better tendency for detecting higher intensities than IMERG.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}