
Exploration of Driver Posture Monitoring Using Pressure Sensors with Lower Resolution


Abstract
1. Introduction
2. Materials and Methods
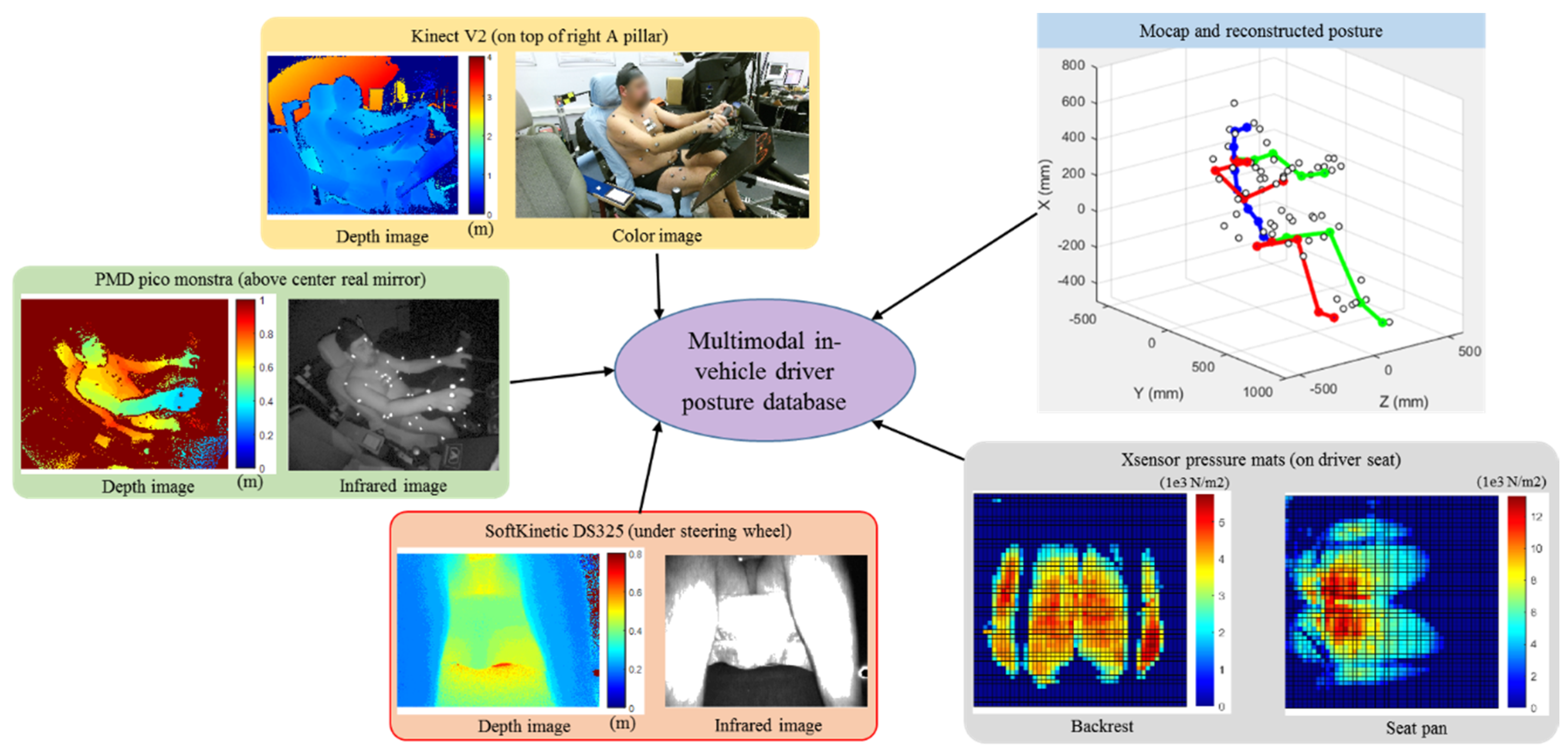
2.1. Data Collection
2.2. Data Analysis
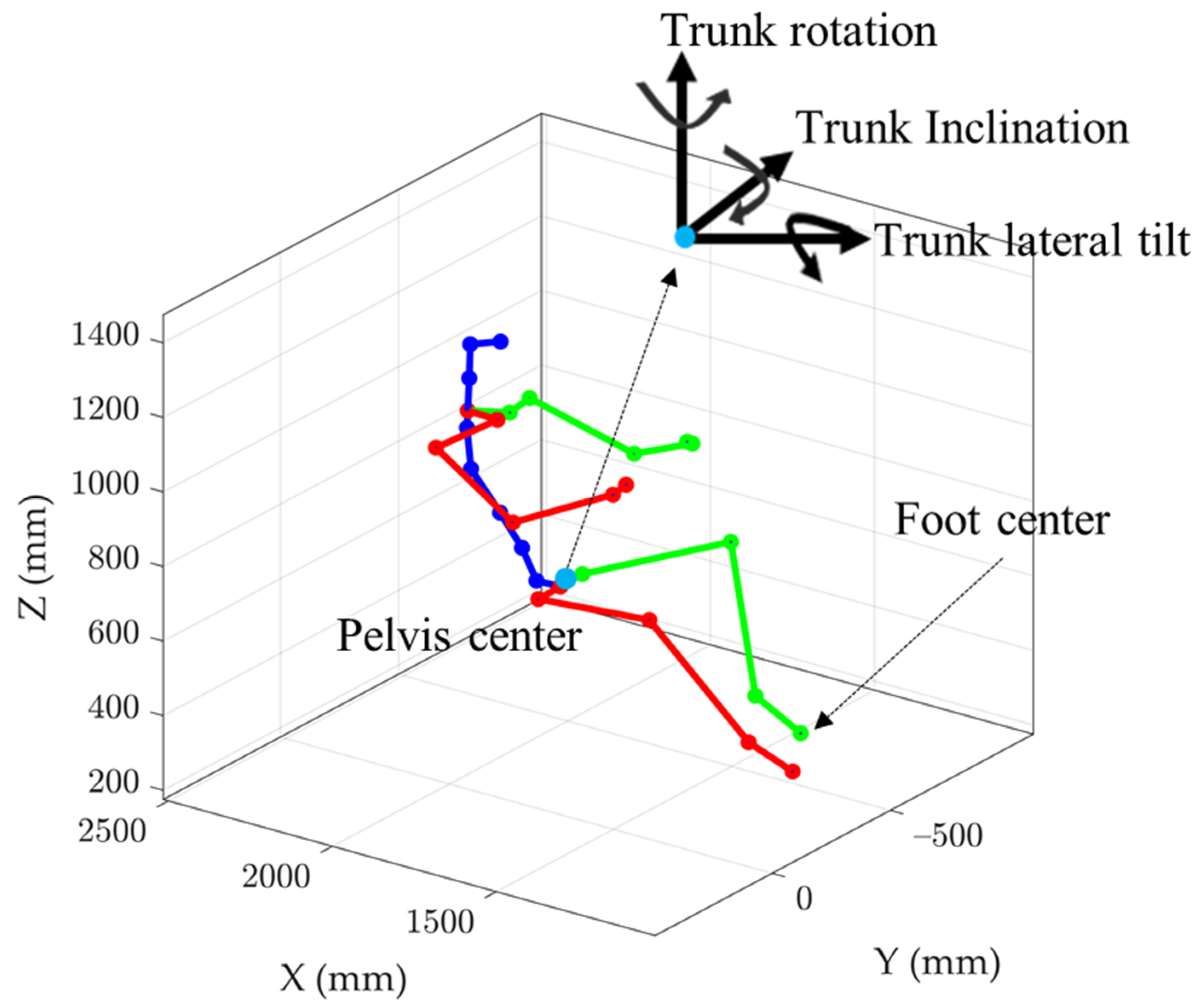
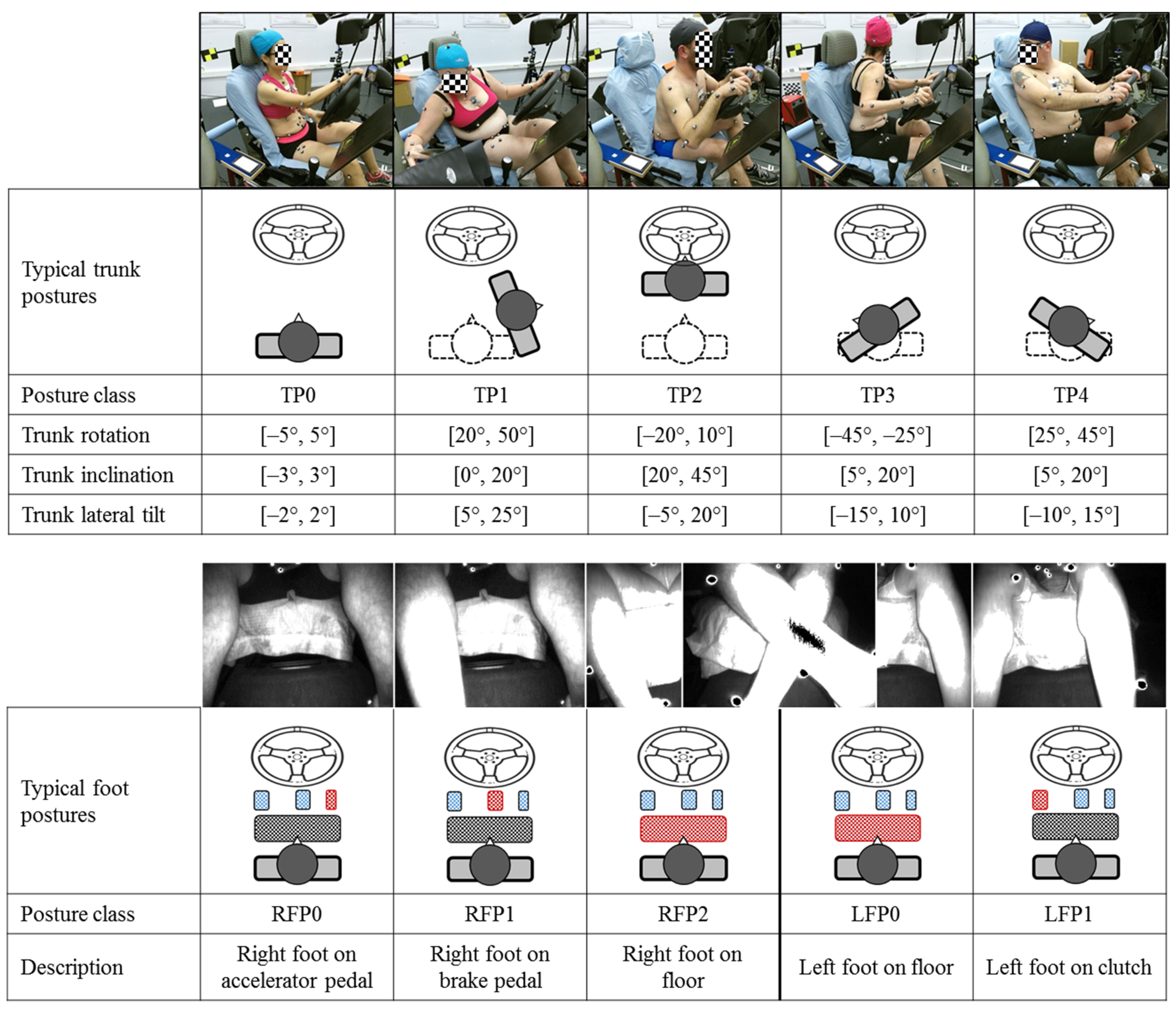
2.2.1. Definition of Posture Classes
2.2.2. BPD Feature Extraction and Evaluation
2.2.3. Posture Classification and Evaluation
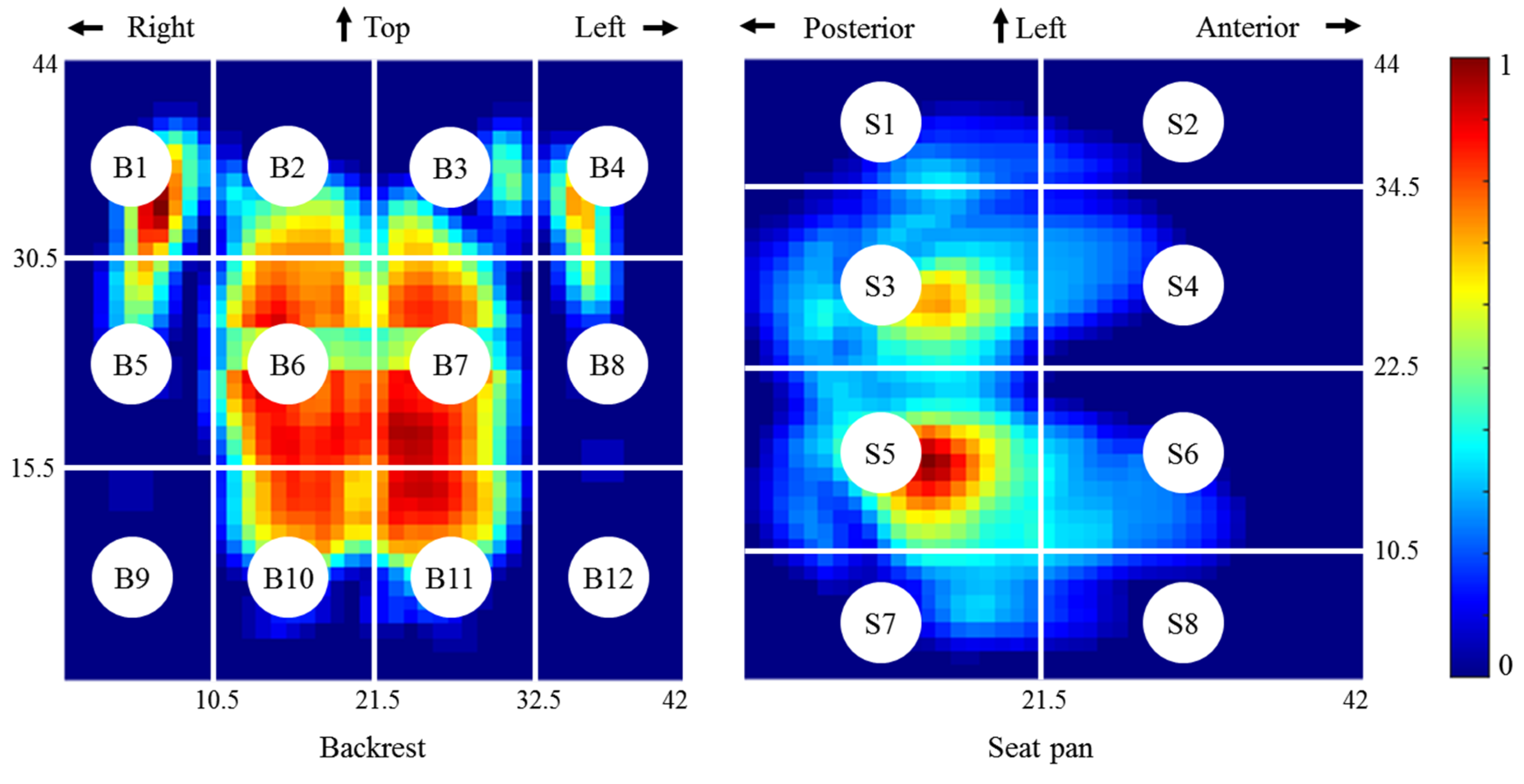
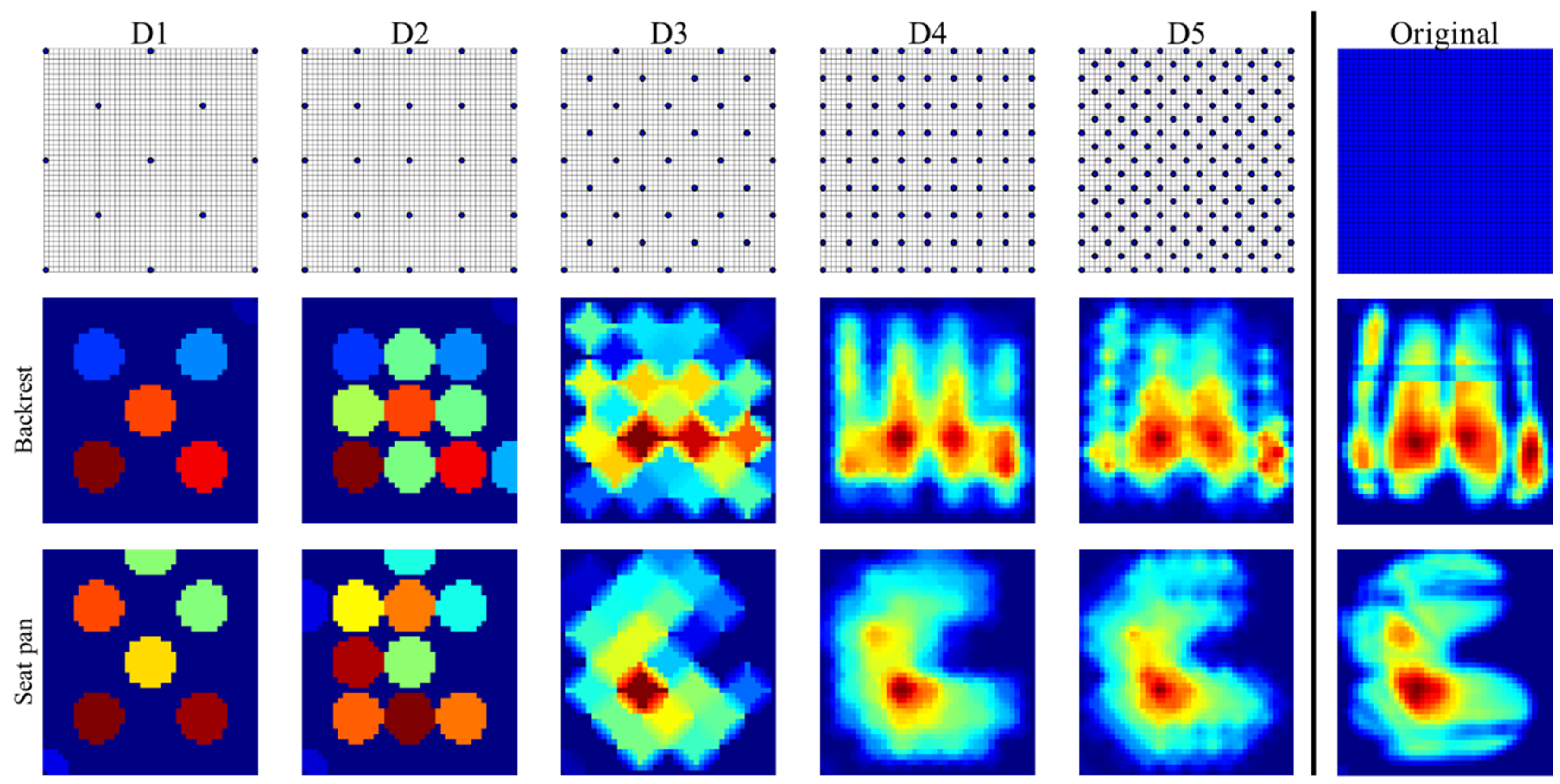
2.2.4. Pressure Sensor Layout Designs
3. Results
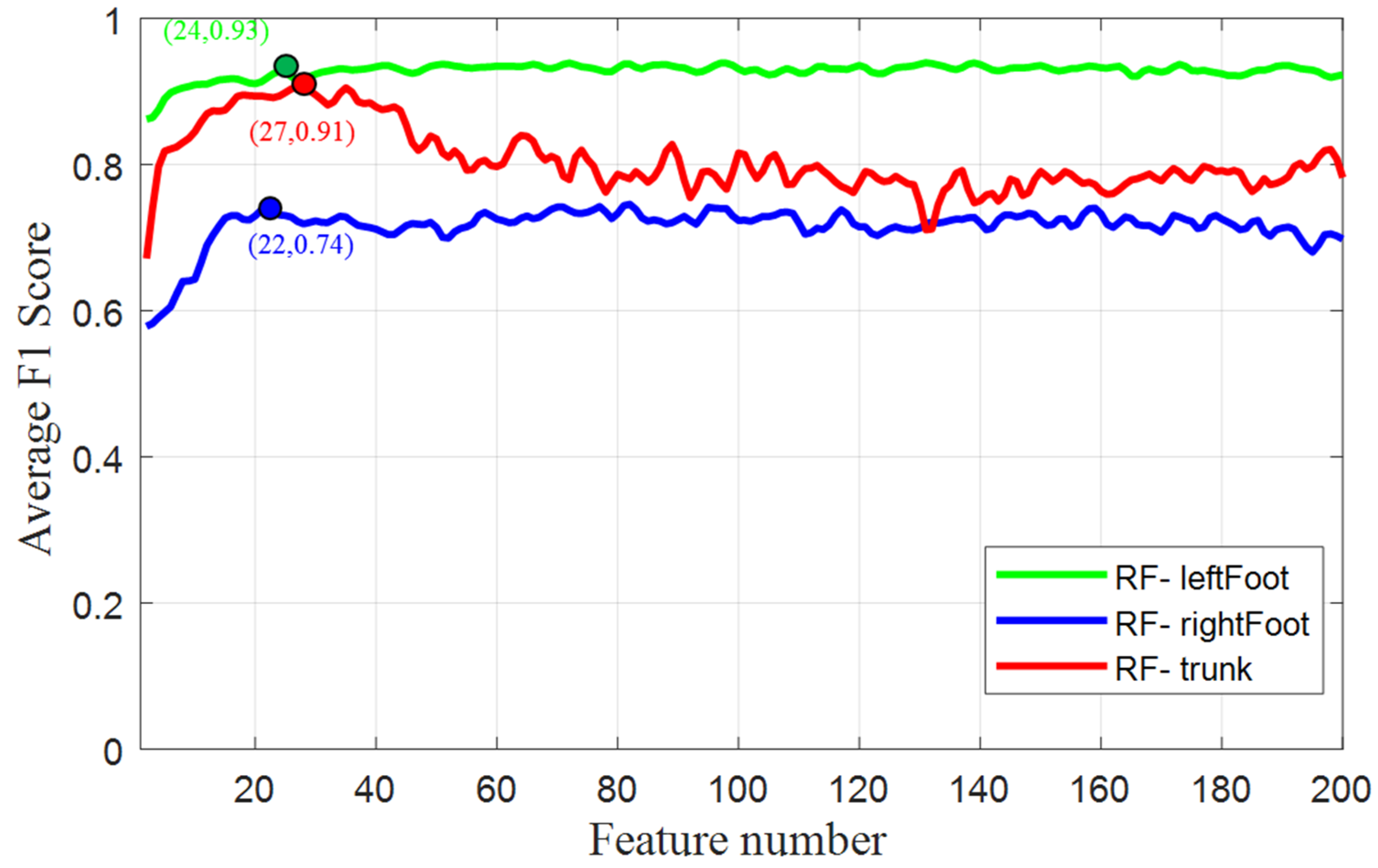
3.1. Evaluation of Importance of Pressure Parameters
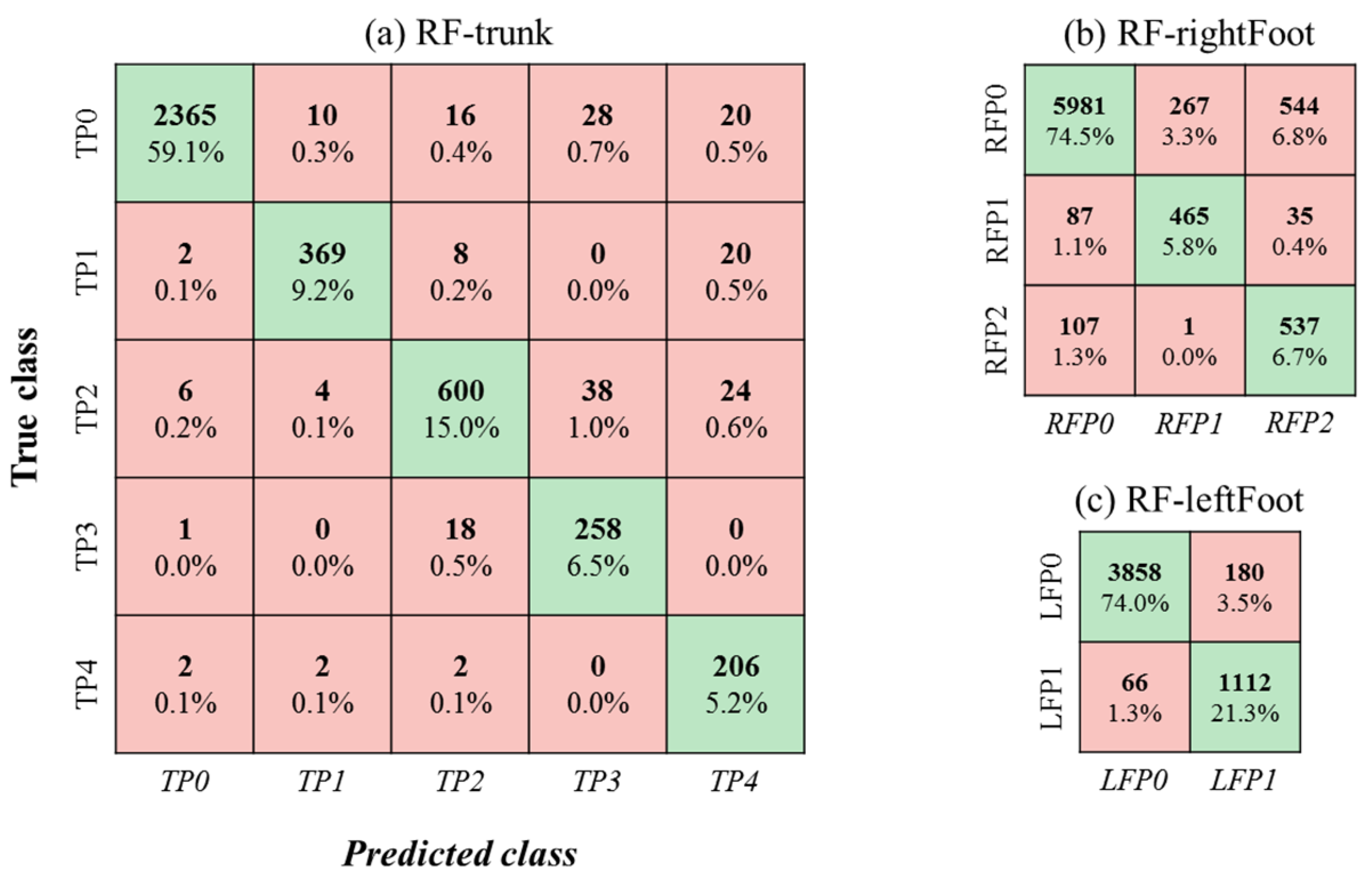
3.2. LOO Cross-Validation of the Posture Classifiers
3.3. Evaluation of the Proposed Pressure Sensor Layouts of Lower Resolution
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BPD | body pressure distribution |
| CAP | contact area proportion |
| COP | center of pressure |
| IMU | inertial measurement unit |
| k-NN | k-nearest neighbors |
| LOO | leave one out |
| MLP | multilayer perceptron |
| NB | naïve Bayes |
| OOB | out of bag |
| PR | pressure ratio |
| PREC | precision |
| REC | recall |
| SVM | support vector machine |
References
- Singh, S. Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; NHTSA’s National Center for Statistics and Analysis: Washington, DC, USA, 2015.
- Née, M.; Contrand, B.; Orriols, L.; Gil-Jardiné, C.; Galéra, C.; Lagarde, E. Road safety and distraction, results from a responsibility case-control study among a sample of road users interviewed at the emergency room. Accid. Anal. Prev. 2019, 122, 19–24. [Google Scholar] [CrossRef]
- Beanland, V.; Fitzharris, M.; Young, K.L.; Lenné, M.G. Driver inattention and driver distraction in serious casualty crashes: Data from the Australian National Crash In-depth Study. Accid. Anal. Prev. 2013, 54, 99–107. [Google Scholar] [CrossRef]
- Lu, Z.; Happee, R.; Cabrall, C.D.; Kyriakidis, M.; de Winter, J. Human factors of transitions in automated driving: A general framework and literature survey. Transport. Res. F 2016, 43, 183–198. [Google Scholar] [CrossRef]
- Cabrall, C.D.; Eriksson, A.; Dreger, F.; Happee, R.; De Winter, J. How to keep drivers engaged while supervising driving automation? A literature survey and categorisation of six solution areas. Theor. Issues Ergon. Sci. 2019, 20, 332–365. [Google Scholar] [CrossRef]
- Yoon, S.H.; Ji, Y.G. Non-driving-related tasks, workload, and takeover performance in highly automated driving contexts. Transport. Res. F 2019, 60, 620–631. [Google Scholar] [CrossRef]
- Khan, M.Q.; Lee, S. A comprehensive survey of driving monitoring and assistance systems. Sensors 2019, 19, 2574. [Google Scholar] [CrossRef]
- Large, D.R.; Burnett, G.; Morris, A.; Muthumani, A.; Matthias, R. A longitudinal simulator study to explore drivers’ behaviour during highly-automated driving. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Los Angeles, CA, USA, 17–21 July 2017; pp. 583–594. [Google Scholar]
- Filatov, A.; Scanlon, J.M.; Bruno, A.; Danthurthi, S.S.K.; Fisher, J. Effects of Innovation in Automated Vehicles on Occupant Compartment Designs, Evaluation, and Safety: A Review of Public Marketing, Literature, and Standards. SAE Tech. Pap. Ser. 2019. [Google Scholar] [CrossRef]
- Wu, H.; Hou, H.; Shen, M.; Yang, K.H.; Jin, X. Occupant kinematics and biomechanics during frontal collision in autonomous vehicles—can rotatable seat provides additional protection? Comput. Methods Biomech. Biomed. Eng. 2020, 23, 191–200. [Google Scholar] [CrossRef]
- Jiang, B.; Ren, H.; Zhu, F.; Chou, C.; Bai, Z. A Preliminary Study on the Restraint System of Self-Driving Car. SAE Tech. Pap. Ser. 2020. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, M.; Beurier, G.; Wang, X. Automobile Driver Posture Monitoring Systems: A Review. China J. Highw. Transp. 2019, 32, 1–18. [Google Scholar]
- Ding, M.; Suzuki, T.; Ogasawara, T. Estimation of driver’s posture using pressure distribution sensors in driving simulator and on-road experiment. In Proceedings of the IEEE International Conference on Cyborg and Bionic Systems (CBS), Beijing, China, 17–19 October 2017; pp. 215–220. [Google Scholar]
- Okabe, K.; Watanuki, K.; Kaede, K.; Muramatsu, K. Study on estimation of driver’s state during automatic driving using seat pressure. In Proceedings of the International Conference on Intelligent Human Systems Integration, Dubai, United Arab Emirates, 7–9 January 2018; pp. 35–41. [Google Scholar]
- Vergnano, A.; Leali, F. Out of position driver monitoring from seat pressure in dynamic maneuvers. In Proceedings of the International Conference on Intelligent Human Systems Integration, San Diego, CA, USA, 7–10 February 2019; pp. 76–81. [Google Scholar]
- Zhao, M.; Beurier, G.; Wang, H.; Wang, X. Driver posture monitoring in highly automated vehicles using pressure measurement. Traffic Inj. Prev. 2021, 1–6. [Google Scholar] [CrossRef]
- Zhao, M.; Beurier, G.; Wang, H.; Wang, X. Extraction of pressure features for predicting driver posture. In Proceedings of the International Research Conference on the Biomechanics of Impact, Munich, Germany, 9 August 2020; pp. 398–409. [Google Scholar]
- Bibbo, D.; Carli, M.; Conforto, S.; Battisti, F. A Sitting Posture Monitoring Instrument to Assess Different Levels of Cognitive Engagement. Sensors 2019, 19, 455. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Li, W.; Gravina, R.; Fortino, G. Posture detection based on smart cushion for wheelchair users. Sensors 2017, 17, 719. [Google Scholar] [CrossRef]
- Roh, J.; Park, H.-j.; Lee, K.; Hyeong, J.; Kim, S.; Lee, B. Sitting posture monitoring system based on a low-cost load cell using machine learning. Sensors 2018, 18, 208. [Google Scholar] [CrossRef]
- Bourahmoune, K.; Amagasa, T. AI-powered posture training: Application of machine learning in sitting posture recognition using the lifechair smart cushion. In Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 5808–5814. [Google Scholar]
- Zemp, R.; Tanadini, M.; Plüss, S.; Schnüriger, K.; Singh, N.B.; Taylor, W.R.; Lorenzetti, S. Application of machine learning approaches for classifying sitting posture based on force and acceleration sensors. BioMed Res. Int. 2016. [Google Scholar] [CrossRef]
- Ma, C.; Li, W.; Gravina, R.; Cao, J.; Li, Q.; Fortino, G. Activity level assessment using a smart cushion for people with a sedentary lifestyle. Sensors 2017, 17, 2269. [Google Scholar] [CrossRef]
- Gravina, R.; Li, Q. Emotion-relevant activity recognition based on smart cushion using multi-sensor fusion. Inform. Fusion 2019, 48, 1–10. [Google Scholar] [CrossRef]
- Jeong, H.; Park, W. Developing and Evaluating a Mixed Sensor Smart Chair System for Real-time Posture Classification: Combining Pressure and Distance sensors. IEEE J. Biomed. Health. 2020. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer Science & Business Media: New York, NY, USA, 2009. [Google Scholar]
- Altman, N.S. An introduction to kernel and nearest-neighbor nonparametric regression. Am. Stat. 1992, 46, 175–185. [Google Scholar]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Zhao, M.; Beurier, G.; Wang, H.; Wang, X. In vehicle diver postural monitoring using a depth camera kinect. In Proceedings of the WCX™ World Congress Experience, Detroit, MI, USA, 10–12 April 2018; pp. 1–9. [Google Scholar]
- Sun, M.; Kohli, P.; Shotton, J. Conditional regression forests for human pose estimation. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3394–3401. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifier | Parameters | Value |
|---|---|---|
| RF | Number of variables to sample | 10 |
| Maximum number of splits | 200 | |
| Predictor selection criterion | “interaction curvature” | |
| Other parameters | Default | |
| SVM | Model | error-correcting output code multiclass |
| Kernel function | “rbf” | |
| Kernel scale | “auto” | |
| Standardize | true | |
| Other parameters | Default | |
| MLP | Number of hidden layers | 512 |
| Size of mini batch | 300 | |
| Optimizer | “adam” | |
| Maximum number of epochs | 40 | |
| Other parameters | Default | |
| k-NN | Number of neighbors | 3 |
| Other parameters | Default | |
| NB | Data distributions | Multivariate multinomial distribution |
| Other parameters | Default |
| Class | RF | NB | SVM | MLP | k-NN |
|---|---|---|---|---|---|
| TP0 | 0.98 | 0.96 | 0.89 | 0.90 | 0.96 |
| TP1 | 0.94 | 0.87 | 0.75 | 0.77 | 0.82 |
| TP2 | 0.91 | 0.77 | 0.84 | 0.82 | 0.84 |
| TP3 | 0.86 | 0.60 | 0.42 | 0.51 | 0.77 |
| TP4 | 0.85 | 0.61 | 0.51 | 0.70 | 0.64 |
| LFP0 | 0.97 | 0.94 | 0.86 | 0.91 | 0.95 |
| LFP1 | 0.90 | 0.88 | 0.84 | 0.86 | 0.80 |
| RFP0 | 0.92 | 0.85 | 0.82 | 0.83 | 0.84 |
| RFP1 | 0.70 | 0.62 | 0.57 | 0.59 | 0.65 |
| RFP2 | 0.61 | 0.53 | 0.50 | 0.53 | 0.57 |
| Average | 0.86 | 0.76 | 0.70 | 0.74 | 0.78 |
| Time * (ms) | 45 | 33 | 138 | 0.25 | 28 |
| Layout | TP0 | TP1 | TP2 | TP3 | TP4 | LFP0 | LFP1 | RFP0 | RFP1 | RFP2 |
|---|---|---|---|---|---|---|---|---|---|---|
| D1 | 0.89 ** | 0.72 ** | 0.62 ** | 0.64 ** | 0.05 ** | 0.89 ** | 0.64 ** | 0.91 ** | 0.29 ** | 0.47 ** |
| D2 | 0.92 ** | 0.69 ** | 0.61 ** | 0.67 ** | 0.10 ** | 0.90 * | 0.69 ** | 0.91 ** | 0.22 ** | 0.50 ** |
| D3 | 0.97 ** | 0.91 * | 0.89 * | 0.84 ** | 0.57 ** | 0.94 * | 0.80 ** | 0.93 * | 0.42 ** | 0.54 * |
| D4 | 0.98 * | 0.91 * | 0.85 * | 0.83 | 0.68 ** | 0.94 | 0.81 ** | 0.92 | 0.56 ** | 0.53 ** |
| D5 | 0.98 | 0.94 | 0.88 | 0.85 | 0.83 * | 0.95 | 0.86 * | 0.93 | 0.68 * | 0.58 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, M.; Beurier, G.; Wang, H.; Wang, X. Exploration of Driver Posture Monitoring Using Pressure Sensors with Lower Resolution. Sensors 2021, 21, 3346. https://doi.org/10.3390/s21103346
Zhao M, Beurier G, Wang H, Wang X. Exploration of Driver Posture Monitoring Using Pressure Sensors with Lower Resolution. Sensors. 2021; 21(10):3346. https://doi.org/10.3390/s21103346
Chicago/Turabian StyleZhao, Mingming, Georges Beurier, Hongyan Wang, and Xuguang Wang. 2021. "Exploration of Driver Posture Monitoring Using Pressure Sensors with Lower Resolution" Sensors 21, no. 10: 3346. https://doi.org/10.3390/s21103346
APA StyleZhao, M., Beurier, G., Wang, H., & Wang, X. (2021). Exploration of Driver Posture Monitoring Using Pressure Sensors with Lower Resolution. Sensors, 21(10), 3346. https://doi.org/10.3390/s21103346