Driver Fatigue Detection Systems Using Multi-Sensors, Smartphone, and Cloud-Based Computing Platforms: A Comparative Analysis



Abstract
1. Introduction
1.1. Overview of Cloud-Based Computing
1.2. Major Contributions
- Describes the DL architectures on Multi-Access Edge Computing (MEC) technology by using 5G networks, in terms of adaptive resource allocation, mobility modeling, security, and energy efficiency.
- Reviews, in detail, the latest research articles in the field of deep learning for detection and prediction of the level of driver’s fatigue. The issues of real-time video processing using DL algorithms are also highlighted to motivate the researchers to focus on computationally efficient, adaptive, and real-time methods.
- Discusses the main challenges in designing and training DL methods for real-time driver fatigue-based video processing and illustrates the recent deep learning trends and direction for future research.
- Explains the importance of multimodal-features based on driver fatigue recognition systems in the deep learning context, which is a new review article in this domain.
- State-of-the-art comparisons were performed on recent multimodal-based driver fatigue detection (DFD) systems to further discuss challenges in this domain.
1.3. Paper Organization
2. Study Background
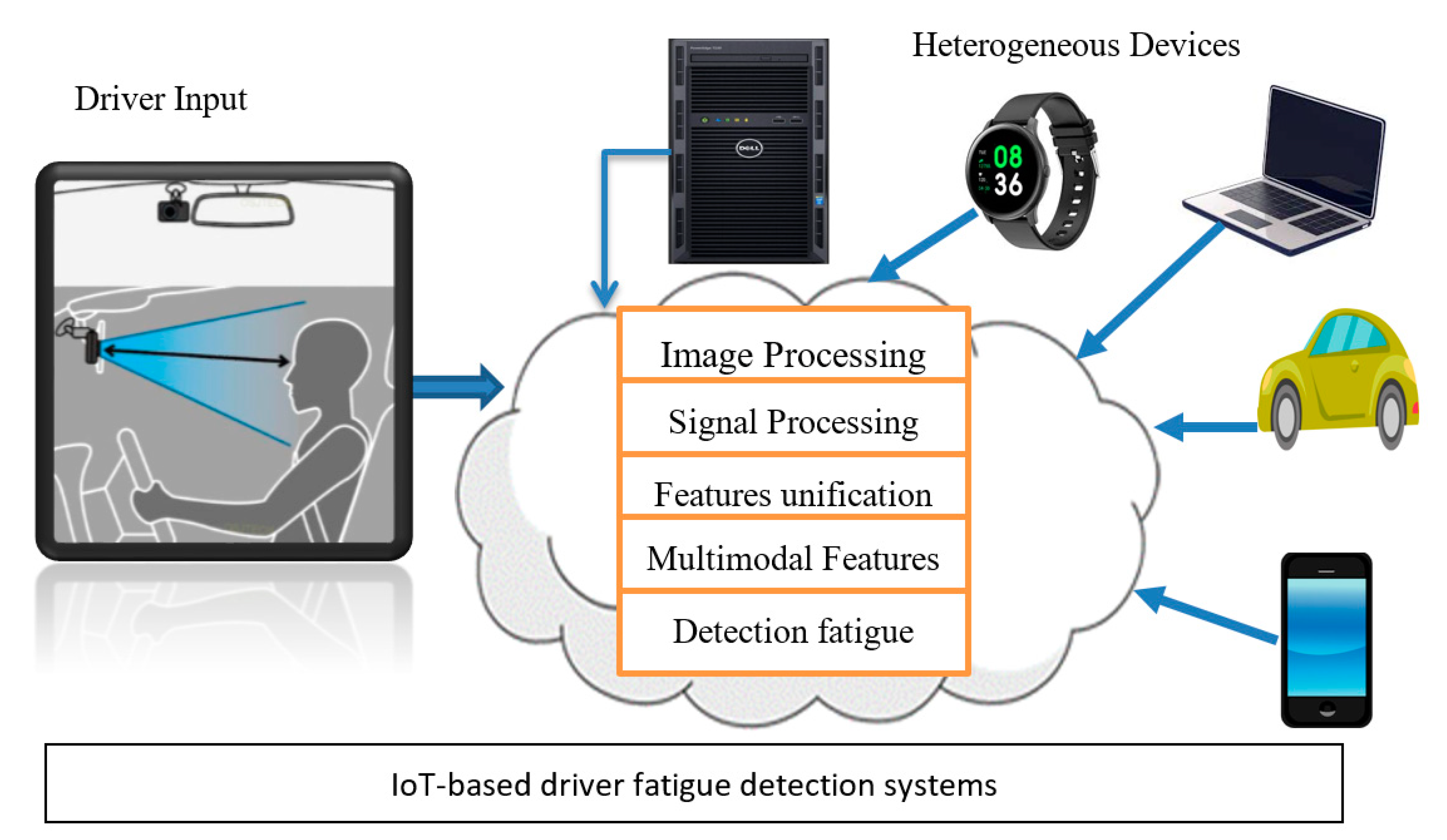
3. IoT-Based Architectures for DFD Systems
3.1. Multi-Sensor Based Driver Fatigue Detection Systems
3.2. Smartphone-Based Driver Fatigue Systems
3.3. Cloud-Based Driver Fatigue Detection Systems
4. Architectural Comparisons
4.1. Smartphone, Multi-Sensor, and Cloud-Based Architectural
4.2. Online Data Sources
4.3. Comparative Analysis
4.3.1. State-of-the-Art Comparisons
4.3.2. Experimental Setup
5. Discussion
5.1. Current Limitations
- Many smartphone-based systems reported that accuracy is not up to the mark when it comes to predicting driver drowsiness in night-vision time.
- A cost-effective solution for detecting driver hypovigilance to promote IoT-based services in developing countries. Still, methodological improvements are required to increase classification results.
- Experiments and evaluations of detecting driver fatigue have been done in a controlled environment.
- Several predicting driver drowsiness through smartphones did not measure four basic physiological behavior states (drowsy, drunk, driving under emotional state disorders, and distracted driving) that may cause traffic accidents.
- A security concern is always present whenever middleware cloud-based architecture is required. This architecture can communicate with the car dashboard, emergency services, and vehicles. However, this facility is not available in modern cars.
- Most of the hypovigilance systems are developed for a next-generation smartphone by supposing the technical support of smart cities.
- For testing and evaluation, there is no international dataset available, which can be used by the research community in case of IoT-based detection of driver fatigue.
- With the ever-increasing population, transport and communication are becoming more demanding and require high-computation processing from big data.
- To predict driver drowsiness, there are several sensors in and outside the vehicle, but, still, data aggregation and communication is becoming another problem in modern cars.
- The rapid growth of cloud-computing and internet connectivity (5G) for large-scale IoT devices in smart cities is increasing. Moreover, it is important to provide same level services to urban areas through deep learning in mobile-edge computing (MEC). Those cities should be required to use MEC computing power to manage energy consumption in growing urban areas for common activities and real-time demand. It is needed to implement DFD systems.
- Moreover, it is important to implement deep learning (DL) by using the MEC technology in large urban areas through light-weight computer vision systems.
5.2. Future Directions on Smartphone-Based/Cloud-Based Platforms
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, X.; Deng, J.; Zhao, J.; Hu, W.; Ngai EC, H.; Wang, R.; Kwok, Y.K. SafeDJ: A crowd-cloud codesign approach to situation-aware music delivery for drivers. ACM Trans. Multimed. Comput. Commun. Appl. (TOMM) 2015, 12, 21. [Google Scholar] [CrossRef]
- Kwon, D.; Hodkiewicz, M.R.; Fan, J.; Shibutani, T.; Pecht, M.G. IoT-based prognostics and systems health management for industrial applications. IEEE Access 2016, 4, 3659–3670. [Google Scholar] [CrossRef]
- Pham, T.N.; Tsai, M.F.; Nguyen, D.B.; Dow, C.R.; Deng, D.J. A cloud-based smart-parking system based on Internet-of-Things technologies. IEEE Access 2015, 3, 1581–1591. [Google Scholar] [CrossRef]
- Kaplan, S.; Guvensan, M.A.; Yavuz, A.G.; Karalurt, Y. Driver behavior analysis for safe driving: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3017–3032. [Google Scholar] [CrossRef]
- Tu, W.; Wei, L.; Hu, W.; Sheng, Z.; Nicanfar, H.; Hu, X.; Ngai, E.C.H.; Leung, V.C. A survey on mobile sensing based mood-fatigue detection for drivers. In Smart City 360°; Springer: Cham, Switzerland, 2016; pp. 3–15. [Google Scholar]
- Pratt, S.G.; Bell, J.L. Analytical observational study of nonfatal motor vehicle collisions and incidents in a light-vehicle sales and service fleet. Accid. Anal. Prev. 2019, 129, 126–135. [Google Scholar] [CrossRef]
- Koesdwiady, A.; Soua, R.; Karray, F.; Kamel, M.S. Recent trends in driver safety monitoring systems: State of the art and challenges. IEEE Trans. Veh. Technol. 2017, 66, 4550–4563. [Google Scholar] [CrossRef]
- Chhabra, R.; Verma, S.; Krishna, C.R. A survey on driver behavior detection techniques for intelligent transportation systems. In Proceedings of the 2017 7th International Conference on Cloud Computing, Data Science & Engineering-Confluence, Noida, India, 12–13 January 2017; IEEE: Noida, India, 2017; pp. 36–41. [Google Scholar]
- Aazam, M.; Fernando, X. Fog Assisted Driver Behavior Monitoring for Intelligent Transportation System. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; IEEE: Toronto, ON, Canada, 2017; pp. 1–5. [Google Scholar]
- Gu, X.; Abdel-Aty, M.; Xiang, Q.; Cai, Q.; Yuan, J. Utilizing UAV video data for in-depth analysis of drivers’ crash risk at interchange merging areas. Accid. Anal. Prev. 2019, 123, 159–169. [Google Scholar] [CrossRef]
- Weng, C.H.; Lai, Y.H.; Lai, S.H. Driver Drowsiness Detection via a Hierarchical Temporal Deep Belief Network. In Asian Conference on Computer Vision Workshop on Driver Drowsiness Detection from Video; Springer: Taipei, Taiwan, 2016. [Google Scholar]
- Li, K.; Wang, S.; Du, C.; Huang, Y.; Feng, X.; Zhou, F. Accurate Fatigue Detection Based on Multiple Facial Morphological Features. J. Sens. 2019, 2019, 7934516. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Barmpounakis, E.N. Driving analytics using smartphones: Algorithms, comparisons and challenges. Transp. Res. Part C Emerg. Technol. 2017, 79, 196–206. [Google Scholar] [CrossRef]
- Liu, W.; Qian, J.; Yao, Z.; Jiao, X.; Pan, J. Convolutional Two-Stream Network Using Multi-Facial Feature Fusion for Driver Fatigue Detection. Future Internet 2019, 11, 115. [Google Scholar] [CrossRef]
- Sadeghi, K.; Banerjee, A.; Sohankar, J.; Gupta, S.K. Safedrive: An autonomous driver safety application in aware cities. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), Sydney, Australia, 14–18 March 2016; IEEE: Sydney, Australia, 2016; pp. 1–6. [Google Scholar]
- Bai, J.; Shen, L.; Sun, H.; Shen, B. Physiological informatics: Collection and analyses of data from wearable sensors and smartphone for healthcare. In Healthcare and Big Data Management; Springer: Singapore, 2017; pp. 17–37. [Google Scholar]
- Melnicuk, V.; Birrell, S.; Crundall, E.; Jennings, P. Towards hybrid driver state monitoring: Review, future perspectives and the role of consumer electronics. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Swede, 19–22 June 2016; pp. 1392–1397. [Google Scholar]
- Smirnov, A.; Kashevnik, A.; Lashkov, I.; Hashimoto, N.; Boyali, A. Smartphone-based two-wheeled self-balancing vehicles rider assistant. In Proceedings of the 2015 17th Conference of Open Innovations Association (FRUCT), Yaroslavl, Russia, 20–21 April 2015; pp. 201–209. [Google Scholar]
- Dinh, H.T.; Lee, C.; Niyato, D.; Wang, P. A survey of mobile cloud computing: Architecture, applications, and approaches. Wireless Communications and Mobile Computing 2013, 13, 1587–1611. [Google Scholar] [CrossRef]
- Abdelaziz, A.; Elhoseny, M.; Salama, A.S.; Riad, A.M. A machine learning model for improving healthcare services on cloud computing environment. Measurement 2018, 119, 117–128. [Google Scholar] [CrossRef]
- Dang, L.M.; Piran, M.; Han, D.; Min, K.; Moon, H. A survey on internet of things and cloud computing for healthcare. Electronics 2019, 8, 768. [Google Scholar] [CrossRef]
- Boukerche, A.; Robson, E. Vehicular cloud computing: Architectures, applications, and mobility. Comput. Netw. 2018, 135, 171–189. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J.-W.; Lee, J. Mobile Personal Multi-Access Edge Computing Architecture Composed of Individual User Devices. Appl. Sci. 2020, 10, 4643. [Google Scholar] [CrossRef]
- Zebin, T.; Scully, P.J.; Peek, N.; Casson, A.J.; Ozanyan, K.B. Design and Implementation of a Convolutional Neural Network on an Edge Computing Smartphone for Human Activity Recognition. IEEE Access 2019, 7, 133509–133520. [Google Scholar] [CrossRef]
- Lee, J.; Kim, D.; Lee, J. ZONE-Based Multi-Access Edge Computing Scheme for User Device Mobility Management. Appl. Sci. 2019, 9, 2308. [Google Scholar] [CrossRef]
- McClellan, M.; Cervelló-Pastor, C.; Sallent, S. Deep Learning at the Mobile Edge: Opportunities for 5G Networks. Appl. Sci. 2020, 10, 4735. [Google Scholar] [CrossRef]
- Matthews, G.; Neubauer, C.; Saxby, D.J.; Wohleber, R.W.; Lin, J. Dangerous intersections? A review of studies of fatigue and distraction in the automated vehicle. Accid. Anal. Prev. 2019, 126, 1–10. [Google Scholar] [CrossRef]
- Chacon-Murguia, M.I.; Prieto-Resendiz, C. Detecting Driver Drowsiness: A survey of system designs and technology. IEEE Consum. Electron. Mag. 2015, 4, 107–119. [Google Scholar] [CrossRef]
- Global Status Report on Road Safety; World Health Organization: Geneva, Switzerland, 2018.
- Sign, H.; Kathuria, A. Analyzing driver behavior under naturalistic driving conditions: A review. Accid. Anal. Prev. 2020, 150, 105908. [Google Scholar]
- Meiring GA, M.; Myburgh, H.C. A review of intelligent driving style analysis systems and related artificial intelligence algorithms. Sensors 2015, 15, 30653–30682. [Google Scholar] [CrossRef] [PubMed]
- Healey, J.; Picard, R. SmartCar: Detecting driver stress. In Proceedings of the 15th International Conference Pattern Recognition, Barcelona, Spain, 3–7 September 2000; Volume 4, pp. 218–221. [Google Scholar]
- Liu, J.; Li, G.; Zhou, J.; Lu, D.; Chen, B.; He, F. Research on Fatigue Driving Monitoring Model and Key Technologies Based on Multi-input Deep Learning. J. Phys. Conf. Ser. 2020, 1648, 1–5. [Google Scholar] [CrossRef]
- Lamba, P.S.; Virmani, D.; Castillo, O. Multimodal human eye blink recognition method using feature level fusion for exigency detection. Soft Comput. 2020, 24, 16829–16845. [Google Scholar] [CrossRef]
- Fatima, B.; Shahid, A.R.; Ziauddin, S.; Safi, A.A.; Ramzan, H. Driver Fatigue Detection Using Viola Jones and Principal Component Analysis. Appl. Artif. Intell. 2020, 34, 456–483. [Google Scholar] [CrossRef]
- Simon, M.; Schmidt, E.A.; Kincses, W.E.; Fritzsche, M.; Bruns, A.; Aufmuth, C.; Schrauf, M. EEG alpha spindle measures as indicators of driver fatigue under real traffic conditions. Clin. Neurophysiol. 2011, 122, 1168–1178. [Google Scholar] [CrossRef]
- Tsai, H.H.; Chang, Y.C. Facial expression recognition using a combination of multiple facial features and support vector machine. Soft Comput. 2018, 22, 4389–4405. [Google Scholar] [CrossRef]
- Kuo, J.; Koppel, S.; Charlton, J.L.; Rudin-Brown, C.M. Neural network-based face detection. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 23–38. [Google Scholar]
- Zhang, T.; Wang, H.; Chen, J.; He, E. Detecting unfavorable driving states in electroencephalography based on a PCA sample entropy feature and multiple classification algorithms. Entropy 2020, 22, 1248. [Google Scholar] [CrossRef]
- Fu, R.; Wang, H.; Zhao, W. Dynamic driver fatigue detection using hidden Markov model in real driving condition. Expert Syst. Appl. 2016, 63, 397–411. [Google Scholar] [CrossRef]
- Fu, R.; Wang, S.; Wang, S. Real-time Alarm Monitoring System for Detecting Driver Fatigue in Wireless Areas. Promet Traffic Transp. 2017, 29, 165–174. [Google Scholar] [CrossRef]
- Maior, C.B.S.; das Chagas Moura, M.J.; Santana, J.M.M.; Lins, I.D. Real-time Classification for Autonomous Drowsiness Detection Using Eye Aspect Ratio. Expert Syst. Appl. 2020, 113505. [Google Scholar] [CrossRef]
- Bacivarov, I.; Ionita, M.; Corcoran, P. Statistical models of appearance for eye tracking and eye-blink detection and measurement. IEEE Trans. Consum. Electron. 2008, 54, 1312–1320. [Google Scholar] [CrossRef]
- Becerra-Riera, F.; Morales-González, A.; Méndez-Vázquez, H. Facial marks for improving face recognition. Pattern Recognit. Lett. 2018, 113, 3–9. [Google Scholar] [CrossRef]
- Gu, W.H.; Zhu, Y.; Chen, X.D.; He, L.F.; Zheng, B.B. Hierarchical CNN-based real-time fatigue detection system by visual-based technologies using MSP model. IET Image Process. 2018, 12, 2319–2329. [Google Scholar] [CrossRef]
- Kiashari, S.E.H.; Nahvi, A.; Bakhoda, H.; Homayounfard, A.; Tashakori, M. Evaluation of driver drowsiness using respiration analysis by thermal imaging on a driving simulator. Multimed. Tools Appl. 2020, 79, 1–23. [Google Scholar] [CrossRef]
- You, F.; Li, Y.H.; Huang, L.; Chen, K.; Zhang, R.H.; Xu, J.M. Monitoring drivers’ sleepy status at night based on machine vision. Multimed. Tools Appl. 2017, 76, 14869–14886. [Google Scholar] [CrossRef]
- Mandal, B.; Li, L.; Wang, G.S.; Lin, J. Towards detection of bus driver fatigue based on robust visual analysis of eye state. IEEE Trans. Intell. Transp. Syst. 2017, 18, 545–557. [Google Scholar] [CrossRef]
- Kumar, A.; Patra, R. Driver drowsiness monitoring system using visual behaviour and machine learning. In Proceedings of the 2018 IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 28–29 April 2018; IEEE: Penang, Malaysia, 2018; pp. 339–344. [Google Scholar]
- Baghdadi, A.; Megahed, F.M.; Esfahani, E.T.; Cavuoto, L.A. A machine learning approach to detect changes in gait parameters following a fatiguing occupational task. Ergonomics 2018, 61, 1116–1129. [Google Scholar] [CrossRef]
- Fogelton, A.; Benesova, W. Eye blink completeness detection. Comput. Vis. Image Underst. 2018, 176, 78–85. [Google Scholar] [CrossRef]
- Al-libawy, H.; Al-Ataby, A.; Al-Nuaimy, W.; Al-Taee, M.A. Modular design of fatigue detection in naturalistic driving environments. Accid. Anal. Prev. 2018, 120, 188–194. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, A.; Dasgupta, A.; Chaudhuri, A.; George, A.; Routray, A.; Guha, R. A multimodal system for assessing alertness levels due to cognitive loading. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1037–1046. [Google Scholar] [CrossRef] [PubMed]
- Zeng, H.; Yang, C.; Dai, G.; Qin, F.; Zhang, J.; Kong, W. EEG classification of driver mental states by deep learning. Cogn. Neurodyn. 2018, 12, 597–606. [Google Scholar] [CrossRef]
- Zheng, W.L.; Lu, B.L. A multimodal approach to estimating vigilance using EEG and forehead EOG. J. Neural Eng. 2017, 14, 026017. [Google Scholar] [CrossRef] [PubMed]
- Karuppusamy, N.S.; Kang, B.Y. Multimodal System to Detect Driver Fatigue Using EEG, Gyroscope, and Image Processing. IEEE Access 2020, 8, 129645–129667. [Google Scholar] [CrossRef]
- Lee, B.-G.; Lee, B.-L.; Chung, W.-Y. Mobile Healthcare for Automatic Driving Sleep-Onset Detection Using Wavelet-Based EEG and Respiration Signals. Sensors 2014, 14, 17915–17936. [Google Scholar] [CrossRef]
- Patel, M.; Lal, S.K.; Kavanagh, D.; Rossiter, P. Applying neural network analysis on heart rate variability data to assess driver fatigue. Expert Syst. Appl. 2011, 38, 7235–7242. [Google Scholar] [CrossRef]
- Kurt, M.B.; Sezgin, N.; Akin, M.; Kirbas, G.; Bayram, M. The ANN-based computing of drowsy level. Expert Syst. Appl. 2009, 36, 2534–2542. [Google Scholar] [CrossRef]
- Halim, Z.; Kalsoom, R.; Bashir, S.; Abbas, G. Artificial intelligence techniques for driving safety and vehicle crash prediction. Artif. Intell. Rev. 2016, 46, 351–387. [Google Scholar] [CrossRef]
- Barr, L.; Howarth, H.; Popkin, S.; Carroll, R.J. A Review and Evaluation of Emerging Driver Fatigue Detection Measures and Technologies; National Transportation Systems Center: Cambridge, UK; US Department of Transportation: Washington, DC, USA, 2005.
- McDonald, A.D.; Lee, J.D.; Schwarz, C.; Brown, T.L. A contextual and temporal algorithm for driver drowsiness detection. Accid. Anal. Prev. 2018, 113, 25–37. [Google Scholar] [CrossRef]
- Čegovnik, T.; Stojmenova, K.; Jakus, G.; Sodnik, J. An analysis of the suitability of a low-cost eye tracker for assessing the cognitive load of drivers. Appl. Ergon. 2018, 68, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Wang, H.; Fu, R. Automated detection of driver fatigue based on entropy and complexity measures. IEEE Trans. Intell. Transp. Syst. 2014, 15, 168–177. [Google Scholar] [CrossRef]
- Bhaskar, A. EyeAwake: A cost effective drowsy driver alert and vehicle correction system. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; pp. 1–6. [Google Scholar]
- Van Gent, P.; Melman, T.; Farah, H.; van Nes, N.; van Arem, B. Multi-Level Driver Workload Prediction using Machine Learning and Off-the-Shelf Sensors. Transp. Res. Rec. 2018, 2672, 141–152. [Google Scholar] [CrossRef]
- Muñoz-Organero, M.; Corcoba-Magaña, V. Predicting upcoming values of stress while driving. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1802–1811. [Google Scholar] [CrossRef]
- Zhang, Q.; Wu, Q.; Zhou, Y.; Wu, X.; Ou, Y.; Zhou, H. Webcam-based, non-contact, real-time measurement for the physiological parameters of drivers. Measurement 2017, 100, 311–321. [Google Scholar] [CrossRef]
- Hashemi, A.; Saba, V.; Resalat, S.N. Real time driver’s drowsiness detection by processing the EEG signals stimulated with external flickering light. Basic Clin. Neurosci. 2014, 5, 22–27. [Google Scholar]
- Lin, C.T.; Chang, C.J.; Lin, B.S.; Hung, S.H.; Chao, C.F.; Wang, I.J. A real-time wireless brain–computer interface system for drowsiness detection. IEEE Trans. Biomed. Circuits Syst. 2010, 4, 214–222. [Google Scholar] [CrossRef]
- Hyun, J.; Gih, S.; Ko, K.; Kwang, S. A smart health monitoring chair for nonintrusive measurement of biological signals. Ieee Trans. Inf. Technol. Biomed. 2012, 16, 150–158. [Google Scholar] [CrossRef]
- Forsman, P.M.; Vila, B.J.; Short, R.A.; Mottd, C.G.; van Dongen, H.P.A. Efficient driver drowsiness detection at moderate levels of drowsiness. Accid. Anal. Prev. 2013, 50, 341–350. [Google Scholar] [CrossRef]
- Wierwille, W.W.; Knipling, R.R. Vehicle-based drowsy driver detection: Current status and future prospects. In Proceedings of the IVHS America 4th Annual Meeting, Atlanta, GA, USA, 17–20 April 1994; pp. 1–24. [Google Scholar]
- Abbas, Q.; Ibrahim, M.E.; Jaffar, M.A. A comprehensive review of recent advances on deep vision systems. Artif. Intell. Rev. 2019, 52, 39–76. [Google Scholar] [CrossRef]
- Abbas, Q.; Ibrahim, M.E.; Jaffar, M.A. Video scene analysis: An overview and challenges on deep learning algorithms. Multimed. Tools Appl. 2018, 77, 20415–20453. [Google Scholar] [CrossRef]
- Wu, C.; Cheng, H.-P.; Li, S.; Li, H.H.; Chen, Y. ApesNet: A Pixel-wise Efficient Segmentation Network. In Proceedings of the 14th ACM/IEEE Symposium on Embedded Systems for Real-Time Multimedia (ESTIMedia’16); ACM: Pittsburgh, PA, USA, 2016; pp. 2–8. ISBN 978-1-4503-4543-9. [Google Scholar] [CrossRef]
- Wu, H.; Chen, X.; Li, G. Simultaneous Tracking and Recognition of Dynamic Digit Gestures for Smart TV Systems. In Proceedings of the Fourth International Conference on Digital Home, Guangzhou, China, 23–25 November 2012; pp. 351–356. [Google Scholar] [CrossRef]
- Wu, L.; Shen, C.; Hengel, A.V.-D. PersonNet: Person Re-identification with Deep Convolutional Neural Networks. In Proceedings of the 11th International Conference on Semantics, Knowledge and Grids (SKG’15), Beijing, China, 24–28 August 2015. [Google Scholar]
- Wu, Z.; Huang, Y.; Wang, L. Learning Representative Deep Features for Image Set Analysis. IEEE Trans. Multimed. 2015, 17, 1960–1968. [Google Scholar] [CrossRef]
- Xiao, T.; Li, H.; Ouyang, W.; Wang, X. Learning Deep Feature Representations with Domain Guided Dropout for Person Re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR’16), Las Vegas, NV, USA, 27–30 June 2016; pp. 1249–1258. [Google Scholar] [CrossRef]
- Xie, D.; Zhang, L.; Bai, L. Deep Learning in Visual Computing and Signal Processing. J. Appl. Comput. Intell. Sot Comput. 2017, 2017, 1320780. [Google Scholar] [CrossRef]
- Xie, S.; Girshick, R.B.; Doll, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the Computer Vision and Pattern Recognition (CVPR’17), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Xue, H.; Liu, Y.; Cai, D.; He, X. Tracking people in RGBD videos using deep learning and motion clues. J. Neurocomput. 2016, 204, 70–76. [Google Scholar] [CrossRef]
- Zagorukyo, S.; Komodakis, N. Wide Residual Networks. In Proceedings of the Computer Vision and Pattern Recognition (CVPR’17), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 818–833. [Google Scholar] [CrossRef]
- Zhang, D.; Han, J.; Li, C.; Wang, J.; Li, X. Detection of Co-Salient Objects by Looking Deep and Wide. Int. J. Comput. 2016, 120, 215–232. [Google Scholar] [CrossRef]
- Alotaibi, A.; Mahmood, A. Deep Face Liveness Detection Based on Nonlinear Diffusion Using Convolution Neural Network. Signal Image Video Process. 2017, 14, 713–720. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, Y.; Khosla, D. Spiking Deep Convolutional Neural Networks for Energy-Efficient Object Recognition. Int. J. Comput. Vis. 2015, 113, 54–66. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object Detection via Region-based Fully Convolutional Networks. In Proceedings of the Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Ding, S.; Lin, L.; Wang, G.; Chao, H. Deep Feature Learning with Relative Distance Comparison for Person Re-identification. J. Pattern. Recognit. 2015, 48, 2993–3003. [Google Scholar] [CrossRef]
- Forczmanski, P.; Nowosielski, A. Deep Learning Approach to Detection of Preceding Vehicle in Advanced Driver Assistance. In Proceedings of the 16th International Conference on Transport Systems Telematics (TST’16), Katowice-Ustron, Poland, 16–19 March 2016; pp. 293–304. [Google Scholar] [CrossRef]
- Gando, G.; Yamada, T.; Sato, H.; Oyama, S.; Kurihara, M. Fine-Tuning Deep Convolutional Neural Networks for Distinguishing Illustrations from Photographs. Int. J. Expert Syst. Appl. 2016, 66, 295–301. [Google Scholar] [CrossRef]
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S.O.; Villena-Martinez, V.; Garcia-Rodriguez, J. A Review on Deep Learning Techniques Applied to Semantic Segmentation. arXiv 2017, arXiv:1704.06857. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- He, T.; Mao, H.; Yi, Z. Moving Object Recognition Using Multi-View Three-Dimensional Convolutional Neural Networks. Neural Comput. Appl. 2017, 28, 3827–3835. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. In Proceedings of the 25th International Conference on Neural Information Processing Systems (NIPS’12), Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Kim, B.; Roh, J.; Dong, S.; Lee, S. Hierarchical Committee of Deep Convolutional Neural Networks for Robust Facial Expression Recognition. J. Multimodal User Interfaces 2016, 10, 173–189. [Google Scholar] [CrossRef]
- Liu, Z.; Peng, Y.; Hu, W. Driver fatigue detection based on deeply-learned facial expression representation. J. Visual Commun. Image Represent. 2020, 71, 102723. [Google Scholar] [CrossRef]
- Naqvi, R.; Arsalan, M.; Batchuluun, G.; Yoon, H.; Park, K. Deep learning-based gaze detection system for automobile drivers using a NIR camera sensor. Sensors 2018, 18, 456. [Google Scholar] [CrossRef]
- Henni, K.; Mezghani, N.; Gouin-Vallerand, C.; Ruer, P.; Ouakrim, Y.; Vallières, É. Feature selection for driving fatigue characterization and detection using visual-and signal-based sensors. In Applied Informatics; Springer: Berlin/Heidelberg, Germany, 2018; Volume 5, p. 7. [Google Scholar]
- Hernández Rojas, L.G.; Martinez Mozos, O.; Ferrández, J.M.; Antelis Ortiz, J.M. EEG-based detection of braking intention under different car driving conditions. Front. Neuroinform. 2018, 12, 29. [Google Scholar] [CrossRef]
- Bergasa, L.M.; Nuevo, J.; Sotelo, M.A.; Barea, R.; Lopez, M.E. Real time system for monitoring driver vigilance. IEEE Trans. Intell. Transp. Syst. 2006, 7, 63–77. [Google Scholar] [CrossRef]
- Ji, Q.; Yang, X. Real-Time eye, gaze, and face pose tracking for monitoring driver vigilance. Real Time Imaging 2002, 8, 357–377. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, J.; Ren, M.; Zheng, Y. Driver fatigue detection: A survey. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006. [Google Scholar]
- Park, I.; Ahn, J.H.; Byun, H. Efficient measurement of the eye blinking by using decision function for intelligent vehicles. In International Conference on Computational Science; Springer: Berlin/Heidelberg, Germany, 2007; pp. 546–549. [Google Scholar]
- Cyganek, B.; Gruszczy´nski, S. Hybrid computer vision system for drivers’ eye recognition and fatigue monitoring. Neurocomputing 2014, 126, 78–94. [Google Scholar] [CrossRef]
- Jo, J.; Lee, S.J.; Park, K.R.; Kim, I.J.; Kim, J. Detecting driver drowsiness using feature-level fusion and user-specific classification. Expert Syst. Appl. 2014, 41, 1139–1152. [Google Scholar] [CrossRef]
- Asim AL-Anizy, G.J.; Nordin, M.J.; Razooq, M.M. Automatic driver drowsiness detection using haar algorithm and support vector machine techniques. Asian J. Appl. Sci. 2015, 8, 149–157. [Google Scholar] [CrossRef]
- Alkinani, M.H.; Khan, W.Z.; Arshad, Q. Detecting Human Driver Inattentive and Aggressive Driving Behavior Using Deep Learning: Recent Advances, Requirements and Open Challenges. IEEE Access 2020, 8, 105008–105030. [Google Scholar] [CrossRef]
- Benrachou, D.E.; dos Santos, F.N.; Boulebtateche, B.; Bensaoula, S. Automatic eye localization; multi-block LBP vs. Pyramidal LBP three-levels image decomposition for eye visual appearance description. In Iberian Conference on Pattern Recognition and Image Analysis; Springer: Cham, Switzerland, 2015; pp. 718–726. [Google Scholar]
- Kuo, J.; Koppel, S.; Charlton, J.L.; Rudin-Brown, C.M. Computer vision and driver distraction: Developing a behaviour-flagging protocol for naturalistic driving data. Accid. Anal. Prev. 2014, 72, 177–183. [Google Scholar] [CrossRef]
- Sigari, M.H.; Fathy, M.; Soryani, M. A driver face monitoring system for fatigue and distraction detection. Int. J. Veh. Technol. 2013, 2013, 1–13. [Google Scholar] [CrossRef]
- Emam, A. Intelligent drowsy eye detection using image mining. Inf. Syst. Front. 2015, 17, 947–960. [Google Scholar] [CrossRef]
- Gou, C.; Wu, Y.; Wang, K.; Wang, K.; Wang, F.Y.; Ji, Q. A joint cascaded framework for simultaneous eye detection and eye state estimation. Pattern Recognit. 2017, 67, 23–31. [Google Scholar] [CrossRef]
- Sun, W.; Zhang, X.; Peeta, S.; He, X.; Li, Y. A real-time fatigue driving recognition method incorporating contextual features and two fusion levels. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3408–3420. [Google Scholar] [CrossRef]
- Diaz-Chito, K.; Hernández-Sabaté, A.; López, A.M. A reduced feature set for driver head pose estimation. Appl. Soft Comput. 2016, 45, 98–107. [Google Scholar] [CrossRef]
- de Naurois, C.J.; Bourdin, C.; Stratulat, A.; Diaz, E.; Vercher, J.L. Detection and prediction of driver drowsiness using artificial neural network models. Accid. Anal. Prev. 2019, 126, 95–104. [Google Scholar] [CrossRef]
- Park, S.; Pan, F.; Kang, S.; Yoo, C.D. Driver drowsiness detection system based on feature representation learning using various deep networks. In Proceedings of the Asian Conference on Computer Vision, Taipei, Taiwan, 20–24 November 2016; Springer: Cham, Switzerland, 2016; pp. 154–164. [Google Scholar]
- El Kaddouhi, S.; Saaidi, A.; Abarkan, M. Eye detection based on the Viola-Jones method and corners points. Multimed. Tools Appl. 2017, 76, 23077–23097. [Google Scholar] [CrossRef]
- Lee, I.; Lee, K. The Internet of Things (IoT): Applications, investments, and challenges for enterprises. Bus. Horiz. 2015, 58, 431–440. [Google Scholar] [CrossRef]
- Henze, M.; Hermerschmidt, L.; Kerpen, D.; Häußling, R.; Rumpe, B.; Wehrle, K. A comprehensive approach to privacy in the cloud-based Internet of Things. Future Generation Computer Systems 2016, 56, 701–718. [Google Scholar] [CrossRef]
- Cubo, J.; Nieto, A.; Pimentel, E. A Cloud-Based Internet of Things Platform for Ambient Assisted Living. Sensors 2014, 14, 14070–14105. [Google Scholar] [CrossRef] [PubMed]
- Budak, U.; Bajaj, V.; Akbulut, Y.; Atila, O.; Sengur, A. An effective hybrid model for EEG-based drowsiness detection. IEEE Sens. J. 2019, 19, 7624–7631. [Google Scholar] [CrossRef]
- Benalia, E.; Bitam, S.; Mellouk, A. Data dissemination for Internet of vehicle based on 5G communications: A survey. Trans. Emerg. Telecommun. Technol. 2020, 31, e3881. [Google Scholar] [CrossRef]
- Reyes-Muñoz, A.; Domingo, M.C.; López-Trinidad, M.A.; Delgado, J.L. Integration of body sensor networks and vehicular ad-hoc networks for traffic safety. Sensors 2016, 16, 107. [Google Scholar] [CrossRef]
- Arumugam, S.; Bhargavi, R. A survey on driving behavior analysis in usage based insurance using big data. J. Big Data 2019, 6, 86. [Google Scholar] [CrossRef]
- Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. Performance Evaluation of an Integrated Fuzzy-Based Driving-Support System for Real-Time Risk Management in VANETs. Sensors 2020, 20, 6537. [Google Scholar] [CrossRef]
- Kumar, V.S.; Ashish, S.N.; Gowtham, I.V.; Balaji, S.A.; Prabhu, E. Smart driver assistance system using raspberry pi and sensor networks. Microprocess. Microsyst. 2020, 79, 103275. [Google Scholar] [CrossRef]
- He, X.U.; Ye, D.I.N.G.; Peng, L.I.; Ruchuan, W.A.N.G. A Novel Cloud Computing Architecture Oriented Internet of Vehicles. In International Conference on P2P, Parallel, Grid, Cloud and Internet Computing; Springer: Cham, Switzerland, 2016; pp. 447–458. [Google Scholar]
- Chen, L.B.; Chang, W.J.; Hu, W.W.; Wang, C.K.; Lee, D.H.; Chiou, Y.Z. A band-pass IR light photodetector for wearable intelligent glasses in a drowsiness-fatigue-detection system. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; IEEE: Las Vegas, NV, USA, 2018; pp. 1–2. [Google Scholar]
- Hu, X.; Li, X.; Ngai, E.C.; Zhao, J.; Leung, V.C.; Nasiopoulos, P. Health drive: Mobile healthcare onboard vehicles to promote safe driving. In Proceedings of the 2015 48th Hawaii International Conference on System Sciences, Kauai, HI, USA, 5–8 January 2015; IEEE: Kauai, HI, USA, 2015; pp. 3074–3083. [Google Scholar]
- Kang, J.J.; Venkatraman, S. An Integrated mHealth and Vehicular Sensor Based Alarm System Emergency Alarm Notification System for Long Distance Drivers using Smart Devices and Cloud Networks. In Proceedings of the 2018 28th International Telecommunication Networks and Applications Conference (ITNAC), Sydney, Australia, 21–23 November 2018; IEEE: Sydney, Australia, 2018; pp. 1–6. [Google Scholar]
- Lee, B.G.; Park, J.H.; Pu, C.C.; Chung, W.Y. Smartwatch-based driver vigilance indicator with kernel-fuzzy-C-means-wavelet method. IEEE Sens. J. 2016, 16, 242–253. [Google Scholar] [CrossRef]
- Lin, C.-T.; Chuang, C.-H.; Huang, C.-S.; Tsai, S.-F.; Lu, S.-W. Wireless and Wearable EEG System for Evaluating Driver Vigilance. IEEE Trans. Biomed. Circuits Syst. 2014, 8, 165–176. [Google Scholar] [PubMed]
- Min, J.; Wang, P.; Hu, J. Driver fatigue detection through multiple entropy fusion analysis in an EEG-based system. PLoS ONE 2017, 12, e0188756. [Google Scholar] [CrossRef] [PubMed]
- Chang, W.J.; Chen, L.B.; Chiou, Y.Z. Design and Implementation of a Drowsiness-Fatigue-Detection System Based on Wearable Smart Glasses to Increase Road Safety. IEEE Trans. Consum. Electron. 2018, 64, 461–469. [Google Scholar] [CrossRef]
- Chhabra, R.; Krishna, C.R.; Verma, S. Smartphone based context-aware driver behavior classification using dynamic bayesian network. J. Intell. Fuzzy Syst. 2019, 36, 4399–4412. [Google Scholar] [CrossRef]
- Lee, B.L.; Lee, B.G.; Chung, W.Y. Standalone wearable driver drowsiness detection system in a smartwatch. IEEE Sens. J. 2016, 16, 5444–5451. [Google Scholar] [CrossRef]
- Guo, Y.; Guo, B.; Liu, Y.; Wang, Z.; Ouyang, Y.; Yu, Z. CrowdSafe: Detecting extreme driving behaviors based on mobile crowdsensing. In Proceedings of the 2017 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computed, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), San Francisco, CA, USA, 4–8 August 2017; IEEE: San Francisco, CA, USA, 2017; pp. 1–8. [Google Scholar]
- Chai, R.; Naik, G.R.; Nguyen, T.N.; Ling, S.H.; Tran, Y.; Craig, A.; Nguyen, H.T. Driver fatigue classification with independent component by entropy rate bound minimization analysis in an EEG-based system. IEEE J. Biomed. Health Inform. 2016, 21, 715–724. [Google Scholar] [CrossRef]
- Luo, H.; Qiu, T.; Liu, C.; Huang, P. Research on fatigue driving detection using forehead EEG based on adaptive multi-scale entropy. Biomed. Signal Process. Control 2019, 51, 50–58. [Google Scholar] [CrossRef]
- Singh, R.R.; Conjeti, S.; Banerjee, R. A comparative evaluation of neural network classifiers for stress level analysis of automotive drivers using physiological signals. Biomed. Signal Process. Control 2013, 8, 740–754. [Google Scholar] [CrossRef]
- Sikander, G.; Anwar, S. Driver Fatigue Detection Systems: A Review. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2339–2352. [Google Scholar] [CrossRef]
- Cao, L.; Li, J.; Xu, Y.; Zhu, H.; Jiang, C. A hybrid vigilance monitoring study for mental fatigue and its neural activities. Cogn. Comput. 2016, 8, 228–236. [Google Scholar] [CrossRef]
- Swan, M. Connected car: Quantified self becomes quantified car. J. Sens. Actuator Netw. 2015, 4, 2–29. [Google Scholar] [CrossRef]
- Zhang, N.; Zheng, W.L.; Liu, W.; Lu, B.L. Continuous vigilance estimation using lstm neural networks. In International Conference on Neural Information Processing; Springer: Cham, Switzerland, 2016; pp. 530–537. [Google Scholar]
- Craye, C.; Karray, F. Driver distraction detection and recognition using RGB-D sensor. arXiv 2015, arXiv:1502.00250. [Google Scholar]
- Koesdwiady, A.; Abdelmoula, R.; Karray, F.; Kamel, M. Driver inattention detection system: A PSO-based multiview classification approach. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 1624–1629. [Google Scholar]
- Mårtensson, H.; Keelan, O.; Ahlström, C. Driver sleepiness classification based on physiological data and driving performance from real road driving. IEEE Trans. Intell. Transp. Syst. 2018, 20, 421–430. [Google Scholar] [CrossRef]
- Chhabra, R.; Verma, S.; Krishna, C.R. Detecting Aggressive Driving Behavior using Mobile Smartphone. In Proceedings of the 2nd International Conference on Communication, Computing and Networking; Springer: Singapore, 2019; pp. 513–521. [Google Scholar]
- RK, K. Mobile and E-Healthcare: Recent Trends and Future Directions. J. Health Med. Econ. 2016, 2, 10. [Google Scholar]
- Grossi, M. A sensor-centric survey on the development of smartphone measurement and sensing systems. Measurement 2018, 135, 572–592. [Google Scholar] [CrossRef]
- Rashvand, H.F.; Hsiao, K.F. Smartphone intelligent applications: A brief review. Multimed. Syst. 2015, 21, 103–119. [Google Scholar] [CrossRef]
- Lee, B.G.; Chung, W.Y. Multi-classifier for highly reliable driver drowsiness detection in android platform. Biomed. Eng. Appl. Basis Commun. 2012, 24, 147–154. [Google Scholar] [CrossRef]
- García, F.; de la Escalera, A.; Armingol, J.M. Driver Monitoring Based on Low-Cost 3-D Sensors. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1855–1866. [Google Scholar]
- Lee, B.G.; Chung, W.Y. A Smartphone-Based Driver Safety Monitoring System Using Data Fusion. Sensors 2012, 12, 17536–17552. [Google Scholar] [CrossRef]
- Xu, L.; Li, S.; Bian, K.; Zhao, T.; Yan, W. Sober-Drive: A Smartphone-assisted Drowsy Driving Detection System. In Proceedings of the 2014 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 3–6 February 2014. [Google Scholar]
- Škrjanc, I.; Andonovski, G.; Ledezma, A.; Sipele, O.; Iglesias, J.A.; Sanchis, A. Evolving cloud-based system for the recognition of drivers’ actions. Expert Syst. Appl. 2018, 99, 231–238. [Google Scholar] [CrossRef]
- Dasgupta, A.; Rahman, D.; Routray, A. A Smartphone-Based Drowsiness Detection and Warning System for Automotive Drivers. IEEE Trans. Intell. Transp. Syst. 2018, 20, 4045–4054. [Google Scholar] [CrossRef]
- Zhang, S.; He, H.; Wang, Z.; Gao, M.; Mao, J. Low-Power Listen Based Driver Drowsiness Detection System Using Smartwatch. In International Conference on Cloud Computing and Security; Springer: Cham, Switzerland, 2018; pp. 453–464. [Google Scholar]
- Freidlin, R.Z.; Dave, A.D.; Espey, B.G.; Stanley, S.T.; Garmendia, M.A.; Pursley, R.; Ehsani, J.P.; Simons-Morton, B.G.; Pohida, T.J. Measuring risky driving behavior using an mhealth smartphone app: Development and evaluation of gforce. JMIR mHealth uHealth 2018, 6, e69. [Google Scholar] [CrossRef] [PubMed]
- Bakar AS, A.; Shan, G.K.; Ta, G.L.; Karim, R.A. IOT—Eye Drowsiness Detection System by Using Intel Edison with GPS Navigation. In Proceedings of the 10th National Technical Seminar on Underwater System Technology, 2018; Springer: Singapore, 2018; pp. 485–493. [Google Scholar]
- Yin, J.L.; Chen, B.H.; Lai KH, R.; Li, Y. Automatic dangerous driving intensity analysis for advanced driver assistance systems from multimodal driving signals. IEEE Sens. J. 2017, 18, 4785–4794. [Google Scholar] [CrossRef]
- Wang, J.; Lu, Y.; Wang, X.; Dong, J.; Hu, X. SAR: A Social-Aware Route Recommendation System for Intelligent Transportation. Comput. J. 2018, 61, 987–997. [Google Scholar] [CrossRef]
- Moon, S.; Min, M.; Nam, J.; Park, J.; Lee, D.; Kim, D. Drowsy Driving Warning System Based on GS1 Standards with Machine Learning. In Proceedings of the 2017 IEEE International Congress on Big Data (BigData Congress), Honolulu, HI, USA, 25–30 June 2017; IEEE: Honolulu, HI, USA, 2017; pp. 289–296. [Google Scholar]
- Prawiro EA, P.J.; Yeh, C.I.; Chou, N.K.; Lee, M.W.; Lin, Y.H. Integrated wearable system for monitoring heart rate and step during physical activity. Mobile Inf. Syst. 2016, 2016, 6850168. [Google Scholar] [CrossRef]
- Bellagente, P.; Crema, C.; Depari, A.; Flammini, A.; Lenzi, G.; Rinaldi, S.; Vezzoli, A. Easy implementation of sensing systems for smart living. In Proceedings of the 2017 IEEE International Systems Engineering Symposium (ISSE), Vienna, Austria, 11–13 October 2017; IEEE: Vienna, Austria, 2017; pp. 1–6. [Google Scholar]
- Yu, J.; Chen, Z.; Zhu, Y.; Chen, Y.J.; Kong, L.; Li, M. Fine-grained abnormal driving behaviors detection and identification with smartphones. IEEE Trans. Mob. Comput. 2017, 16, 2198–2212. [Google Scholar] [CrossRef]
- Yin, J.; Hu, J.; Mu, Z. Developing and evaluating a mobile driver fatigue detection network based on electroencephalograph signals. Healthc. Technol. Lett. 2017, 4, 34–38. [Google Scholar] [CrossRef]
- Dinh, T.; Kim, Y.; Lee, H. A location-based interactive model of internet of things and cloud (IoT-Cloud) for mobile cloud computing applications. Sensors 2017, 17, 489. [Google Scholar] [CrossRef]
- Mora, H.; Signes-Pont, M.; Gil, D.; Johnsson, M. Collaborative working architecture for IoT-based applications. Sensors 2018, 18, 1676. [Google Scholar] [CrossRef]
- Kashevnik, A.; Lashkov, I.; Ponomarev, A.; Teslya, N.; Gurtov, A. Cloud-Based Driver Monitoring System Using a Smartphone. IEEE Sensors Journal 2020, 20, 6701–6715. [Google Scholar] [CrossRef]
- Wang, L.; Von Laszewski, G.; Younge, A.; He, X.; Kunze, M.; Tao, J.; Fu, C. Cloud Computing: A Perspective Study. New Gener. Comput. 2010, 28, 137–146. [Google Scholar] [CrossRef]
- Wei, G.; Athanasios, V.; Zheng, Y.; Xiong, N. A game-theoretic method of fair resource allocation for cloud computing services. J. Supercomput. 2020, 54, 252–269. [Google Scholar] [CrossRef]
- Dodani, M. The Silver Lining of Cloud Computing. J. Object Technol. 2009, 8, 29–38. [Google Scholar] [CrossRef]
- Mell, P.; Grance, T. Cloud Computing Definition; Version 15; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2009.
- Weiss, A. Computing in the Clouds; ACM: New York, NY, USA, 2007. [Google Scholar]
- Hu, Y.C.; Patel, M.; Sabella, D.; Sprecher, N.; Young, V. Mobile Edge Computing: A Key Technology towards 5G. Technical Report. ETSI. 2015. Available online: https://www.etsi.org/images/files/ETSIWhitePapers/etsi_wp11_mec_a_key_technology_towards_5g.pdf (accessed on 25 November 2020).
- Ed-Doughmi, Y.; Idrissi, N.; Hbali, Y. Real-Time System for Driver Fatigue Detection Based on a Recurrent Neuronal Network. J. Imaging 2020, 6, 8. [Google Scholar] [CrossRef]
- Sagonas, C.; Tzimiropoulos, G.; Zafeiriou, S.; Pantic, M. A semi-automatic methodology for facial landmark annotation. In Proceedings of the IEEE International Conference Computer Vision and Pattern Recognition (CVPR-W), 5th Workshop on Analysis and Modeling of Faces and Gestures (AMFG 2013), Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Jegham, I.; Khalifa, A.B.; Alouani, I.; Mahjoub, M.A. A novel public dataset for multimodal multiview and multispectral driver distraction analysis: 3MDAD. Signal Process. Image Commun. 2020, 88, 115960. [Google Scholar] [CrossRef]
- Akrout, B.; Mahdi, W. Spatio-temporal features for the automatic control of driver drowsiness state and lack of concentration. Mach. Vis. Appl. 2015, 26, 1–13. [Google Scholar] [CrossRef]
- Ujir, H.; Spann, M.; Hipiny, I.H.M. 3D facial expression classification using 3D facial surface normal. In The 8th International Conference on Robotic, Vision, Signal Processing & Power Applications; Springer: Singapore, 2014; pp. 245–253. [Google Scholar]
- Min, J.; Wang, P.; Hu, J. The Original EEG Data for Driver Fatigue Detection. Figshare. Available online: https://figshare.com/articles/dataset/The_original_EEG_data_for_driver_fatigue_detection/5202739/1 (accessed on 1 February 2019).
- Cao, Z.; Chuang, M.; King, J.T.; Lin, C.-T. Multi-Channel EEG Recordings during a Sustained-Attention Driving Task. Figshare. Fileset. 2018. Available online: https://figshare.com/articles/dataset/Multi-channel_EEG_recordings_during_a_sustained-attention_driving_task/6427334 (accessed on 4 March 2020).
- Cao, Z.; Chuang, C.H.; King, J.K.; Lin, C.T. Multi-channel EEG recordings during a sustained-attention driving task. Sci. Data 2019, 6, 1–8. [Google Scholar] [CrossRef]
- Cattan, G.; Rodrigues, P.L.C.; Congedo, M. EEG Alpha Waves Dataset. Available online: https://zenodo.org/record/2348892#.X4bNidAzaM8 (accessed on 20 February 2020).
- Ahmad, Z.; Khan, N. Human Action Recognition Using Deep Multilevel Multimodal (M2) Fusion of Depth and Inertial Sensors. IEEE Sens. J. 2019, 20, 1445–1455. [Google Scholar] [CrossRef]
- Abouelenien, M.; Burzo, M.; Mihalcea, R. Cascaded multimodal analysis of alertness related features for drivers safety applications. In Proceedings of the 8th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 1–3 July 2015; pp. 1–8. [Google Scholar]
- Du, L.H.; Liu, W.; Zheng, W.L.; Lu, B.L. Detecting driving fatigue with multimodal deep learning. In Proceedings of the 2017 8th International IEEE/EMBS Conference on Neural Engineering (NER), Shanghai, China, 25–28 May 2017; pp. 74–77. [Google Scholar]
- Daza, R.; Morales, A.; Fierrez, J.; Tolosana, R. mEBAL: A Multimodal Database for Eye Blink Detection and Attention Level Estimation. arXiv 2020, arXiv:2006.05327. [Google Scholar]
- Němcová, A.; Svozilová, V.; Bucsuházy, K.; Smíšek, R.; Mézl, M.; Hesko, B.; Belák, M.; Bilík, M.; Maxera, P.; Seitl, M.; et al. Multimodal Features for Detection of Driver Stress and Fatigue. IEEE Trans. Intell. Transp. Syst. 2020, 1–20. [Google Scholar] [CrossRef]
- Chen, L.B.; Chang, W.J.; Su, J.P.; Ciou, J.Y.; Ciou, Y.J.; Kuo, C.C.; Li KS, M. A wearable-glasses-based drowsiness-fatigue-detection system for improving road safety. In Proceedings of the 2016 IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; pp. 1–2. [Google Scholar]
- Lawanont, W.; Inoue, M.; Mongkolnam, P.; Nukoolkit, C. Neck posture monitoring system based on image detection and smartphone sensors using the prolonged usage classification concept. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 1501–1510. [Google Scholar] [CrossRef]
- Han, W.; Yang, Y.; Huang, G.B.; Sourina, O.; Klanner, F.; Denk, C. Driver drowsiness detection based on novel eye openness recognition method and unsupervised feature learning. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Kowloon, China, 9–12 October 2015; pp. 1470–1475. [Google Scholar]
- Ye, B.; Qiu, T.; Bai, X.; Liu, P. Research on Recognition Method of Driving Fatigue State Based on Sample Entropy and Kernel Principal Component Analysis. Entropy 2018, 20, 701. [Google Scholar] [CrossRef] [PubMed]
- Carmona, J.; García, F.; Martín, D.; Escalera, A.; Armingol, J. Data fusion for driver behaviour analysis. Sensors 2015, 15, 25968–25991. [Google Scholar] [CrossRef]
- Al-Libawy, H.; Al-Ataby, A.; Al-Nuaimy, W.; Al-Taee, M.A. HRV-based operator fatigue analysis and classification using wearable sensors. In Proceedings of the 2016 13th International Multi-Conference on Systems, Signals & Devices (SSD), Leipzig, Germany, 21–24 March 2016; pp. 268–273. [Google Scholar]
- Krishnan, A.S.; Hu, X.; Deng, J.Q.; Wang, R.; Liang, M.; Zhu, C.; Leung, V.C.; Kwok, Y.K. A novel cloud-based crowd sensing approach to context-aware music mood-mapping for drivers. In Proceedings of the 2015 IEEE 7th International Conference on Cloud Computing Technology and Science (CloudCom), Vancouver, BC, Canada, 30 November–3 December 2015; pp. 475–478. [Google Scholar]
- Gordienko, N. Multi-parametric statistical method for estimation of accumulated fatigue by sensors in ordinary gadgets. arXiv 2016, arXiv:1605.04984. [Google Scholar]
- Al-shareeda, M.A.; Anbar, M.; Hasbullah, I.H.; Manickam, S. Survey of Authentication and Privacy Schemes in Vehicular ad hoc Networks. IEEE Sensors J. 2020, 21, 2422–2433. [Google Scholar] [CrossRef]
- Bose, B.; Dutta, J.; Ghosh, S.; Pramanick, P.; Roy, S. Smartphone based system for real-time aggressive driving detection and marking rash driving-prone areas. In Proceedings of the Workshop Program of the 19th International Conference on Distributed Computing and Networking, Varanasi, India, 4–7 January 2018; ACM: New York, NY, USA, 2019; p. 27. [Google Scholar]
- Park, S.; Han, C.H.; Im, C.H. Design of Wearable EEG Devices Specialized for Passive Brain–Computer Interface Applications. Sensors 2020, 20, 4572. [Google Scholar] [CrossRef]
- Wijnands, J.S.; Thompson, J.; Nice, K.A.; Aschwanden, G.D.; Stevenson, M. Real-time monitoring of driver drowsiness on mobile platforms using 3D neural networks. Neural Comput. Appl. 2019, 32, 1–13. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Collobert, R.; Weston, J. A Unified Architecture for Natural Language Processing: Deep Neural Networks with Multitask Learning. In Proceedings of the 25th International Conference on Machine Learning (ICML 2008), Helsinki, Finland, 5–9 July 2008; pp. 160–167. [Google Scholar]
- Park, J.; Samarakoon, S.; Bennis, M.; Debbah, M. Wireless Network Intelligence at the Edge. Proc. IEEE 2019, 107, 2204–2239. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cited | Features | Classification | Sensors | Accuracy | Cost | Robustness |
|---|---|---|---|---|---|---|
| [62] | V + nV features | DBN | steering angle and acceleration | NA | High | High |
| [63] | Eye features | Fuzzy logic | ET | NA | Low | Low |
| [64] | nV features | ANN | EEG, ECG, EOG | ACC: 96.5%, AUC: 0.99 | High | High |
| [100] | PCCR | CNN model | NIR camera sensor | NA | Low | Low |
| [145] | V + nV features | Fisher classifier | EEG | NA | Middle | Middle |
| [146] | nV features | NA | Five killer QS | NA | Low | Low |
| [147] | V + nV features | LSTM-RNN model | EEG, EOG | NA | High | High |
| [148] | V + nV features | AdaBoost and HMM | Kinect sensor | 85% to 90% | Middle | High |
| [149] | nV features | RF and PSO | multi-sensory | 91.46% | High | Middle |
| [150] | nV | RF | EEG, ECG, EOG | 94.1% | High | Low |
| Cited | Sensors/Parameters | Algorithms | Accuracy | Platforms |
|---|---|---|---|---|
| [156] Garc et al. (2014) | Eye movements and PPG signals | ANN, DBN, SVM, ICA and GA | NA | Android |
| [157] Chang et al. (2012) | ECG, PPG, temperature, heart rate, blood pressure, temperature, speed and PERCLOS | Fuzzy Bayesian framework | NA | Android |
| [158] Xu et al. (2014) | PERCLOS, blink time and blink rate | NN | ACC: 90% | Android |
| [159] Zhang et al. (2014) | EEG, ECG, EOG | ACC: 96.5 | Android | |
| [160] Dasgupta et al. (2018) | PERCLOS, Infrared Light and Microphone | Percentage of eyelid | ACC: 93.33% | Android |
| [161] Zhang et al. (2018) | Steering behavior and heart rate of the driver | Wearing smartwatch and second heart rate | ACC: 94.39% | Android |
| [162] Freidlin et al. (2018) | ECG, EMG and galvanic skin response (GSR) modules and accelerometers, a magnetometer and a gyroscope | NA | NA | IOS & Android |
| [163] Bakar et al. (2015) | PERCLOS and GPS | NA | NA | Android |
| [164] Yin et al. (2017) | EEG and PEN | Fuzzy Entropy and SVM | ACC: 95% | Android |
| Cited. | Sensors/Parameters | Algorithms | Cloud Environment | Processing Cost | Overhead |
|---|---|---|---|---|---|
| [1] Hu X et al. (2015) | Drivers’ social context | NA | Cloud Server | Low | Low |
| [126] Muñoz et al. (2016) | PERCLOS, blink time and blink rate | NN | Body Sensor Networks (BSNs) with Vehicular ad hoc Networks (VANETs) | Middle | Middle |
| [136] Ming et al. (2017) | EEG | Fuzzy Entropy and SVM | Cloud Server | High | High |
| [159] Škrjanc et al. (2018) | Driver by speed, revolutions, steering-wheel and pedals etc., without using intelligence sensors | NA | Cloud Server | High | High |
| [160] Dasgupta et al. (2018) | mobile sensors | NA | multi-tier vehicular social network (M-VSN) |
| Cited | Data Source | Features | Link URL |
|---|---|---|---|
| [11] | NTHU-DDD Dataset | 36 subjects, video: 9.5 h, 5 different classes | http://cv.cs.nthu.edu.tw/php/callforpaper/datasets/DDD/ |
| [180] | UTA-RLDD dataset | Video—30 h, 3 features: alertness, low vigilance, and drowsiness, frame rate: 30 fps, participant: 60 | http://vlm1.uta.edu/~athitsos/projects/drowsiness/ |
| [181] | MultiPIE | different subjects, poses, illumination, occlusions, 68 landmark points | https://ibug.doc.ic.ac.uk/resources/facial-point-annotations/ |
| - | Kaggle-distracted drivers | 22,424 images of size (480 × 680), 10 classes | https://www.kaggle.com/c/state-farm-distracted-driver-detection |
| [182] | 3MDAD | 60 subjects, 16 different actions | https://sites.google.com/site/benkhalifaanouar1/6-datasets#h.nzos3chrzmb2 |
| [183] | MiraclHB | AVI format with a resolution of 640 × 480 and frequency 30 fps, 12: subjects | http://www.belhassen-akrout.com/ |
| [184] | BU-3DFE | 100: subjects with 2500 facial expression models | http://www.cs.binghamton.edu/~lijun/Research/3DFE/3DFE_Analysis.html |
| Cited | Data Source | Features | Link URL | Format |
|---|---|---|---|---|
| [185] Min et al. | Fatigue—EEG | 12 subjects, 40 channels | https://figshare.com/articles/dataset/the_original_EEG_data_for_driver_fatigue_detection/5202739/1 | .cnt |
| [186,187] Cao et al. | Fatigue—multi-channel EEG | 27 subjects, 32 channels, EEGLab software | https://figshare.com/articles/Multi-channel_EEG_recordings_during_a_sustained-attention_driving_task/6427334/2 | .set |
| [188] Cattan et al. | EEG—Alphawave | 20 subjects, 16 channels | https://zenodo.org/record/2348892#.X4bfptAzaM9 | .mat |
| Devices and Components | Parameters Setup |
|---|---|
| CPU | Intel ® Core i7-7200U processor G8, 16 GB of RAM |
| Screen Resolution | 1280 × 960 |
| Network | Ethernet Network Driver |
| Hard Disk | 512 GB |
| Camera | 720 p HD video, Widescreen, Length: 4.3”/109 mm Width: 1.75”/44.5 mm |
| Arduino | Uno, Microcontroller: ATmega328, Operating Voltage: 5 V |
| Multi-sensors | ECG, EEG for Arduino |
| Mobile platform | Android Studio 8.1 with emulator |
| Cloud platform | Microsoft Azure cloud services |
| Classifiers | AL | VL | MD | ED |
|---|---|---|---|---|
| ANN | SE: 65.6, SP: 67.5, PR: 0.64, ACC: 67 | SE: 66.2, SP: 67, PR: 0.65, ACC: 68 | SE: 67, SP: 68.3, PR: 0.65, ACC: 68 | SE: 75.3, SP: 76.4, PR: 0.75, ACC: 76.5 |
| SVM | SE: 81.3, SP: 82.2, PR: 0.80, ACC: 81 | SE: 80.0, SP: 81.5, PR: 0.81, ACC: 80 | SE: 71.2, SP: 72.3, PR: 0.70, ACC: 71 | SE: 77.1, SP: 78.1, PR: 0.78, ACC: 79.5 |
| CNN+ANN | SE: 82.6, SP: 83.4, PR: 0.82, ACC: 82 | SE: 80.4, SP: 81.3, PR: 0.82, ACC: 81 | SE: 72.4, SP: 73.5, PR: 0.73, ACC: 72 | SE: 78.4, SP: 79.1, PR: 0.78, ACC: 79.0 |
| CNN+SVM | SE: 81.3, SP: 82.2, PR: 0.80, ACC: 81 | SE: 84.0, SP: 85.5, PR: 0.83, ACC: 84 | SE: 78.2, SP: 79.3, PR: 0.78, ACC: 77 | SE: 80.1, SP: 81.1, PR: 0.81, ACC: 81.5 |
| CNN with soft-max classification | SE: 82, SP: 83, PR: 0.83, ACC: 83 | SE: 84, SP: 85, PR: 0.84, ACC: 84 | SE: 81.2, SP: 82.3, PR: 0.84, ACC: 84 | SE: 84.5, SP: 0.85, PR: 0.84, ACC: 85 |
| CNN+RNN-LSTM | SE: 86.3, SP: 87.6, PR: 0.85, ACC: 86 | SE: 88.3, SP: 89, PR: 0.89, ACC: 89 | SE: 90.0, SP: 91.2, PR: 0.90, ACC: 90 | SE: 92, SP: 93, PR: 0.91, ACC: 92 |
| Techniques | AL | VL | MD | ED |
|---|---|---|---|---|
| ANN | SE: 83.6, SP: 84.4, PR: 0.83, ACC: 83 | SE: 80.4, SP: 81.3, PR: 0.82, ACC: 81 | SE: 72.4, SP: 73.5, PR: 0.73, ACC: 72 | SE: 78.4, SP: 79.1, PR: 0.78, ACC: 9.0 |
| SVM | SE: 82.3, SP: 83.2, PR: 0.81, ACC: 82 | SE: 84.0, SP: 85.5, PR: 0.83, ACC: 84 | SE: 78.2, SP: 79.3, PR: 0.78, ACC: 77 | SE: 80.1, SP: 81.1, PR: 0.81, ACC: 1.5 |
| CNN+ANN | SE: 83, SP: 84, PR: 0.84, ACC: 84 | SE: 84, SP: 85, PR: 0.84, ACC: 84 | SE: 81.2, SP: 82.3, PR: 0.84, ACC: 84 | SE: 84.5, SP: 0.85, PR: 0.84, ACC: 85 |
| CNN+SVM | SE: 88.3, SP: 89.6, PR: 0.87, ACC: 88 | SE: 88.3, SP: 89, PR: 0.89, ACC: 89 | SE: 90.0, SP: 91.2, PR: 0.90, ACC: 90 | SE: 93.5, SP: 94.3, PR: 0.92, ACC: 93 |
| CNN with soft-max classification | SE: 83, SP: 84, PR: 0.84, ACC: 84 | SE: 84, SP: 85, PR: 0.84, ACC: 84 | SE: 81.2, SP: 82.3, PR: 0.84, ACC: 84 | SE: 84.5, SP: 0.85, PR: 0.84, ACC: 85 |
| CNN+RNN-LSTM | SE: 88.3, SP: 89.6, PR: 0.87, ACC: 88 | SE: 88.3, SP: 89, PR: 0.89, ACC: 89 | SE: 90.0, SP: 91.2, PR: 0.90, ACC: 90 | SE: 93.5, SP: 94.3, PR: 0.92, ACC: 93 |
| Cited | Methodology | Detection Accuracy (ACC) | Time | Platform |
|---|---|---|---|---|
| (a) Classification driver fatigue without pre-training | ||||
| [36] Simon_EEG (2012) | EEG with statistical analysis | FT: 83.5%, NM: 84.5% | 6.7 s | No |
| [157] BJ Chang-smartphone (2012) | Different sensors, including video, electrocardiography, photoplethysmography, temperature, and a three-axis accelerometer | FT: 85.5%, NM: 86.5% | 7.88 s | Yes |
| (b) Classification driver fatigue in cloud platform | ||||
| [36] Simon_EEG (2012) | EEG with statistical analysis | FT: 83.5%, NM: 84.5% | 4.33 s | No |
| [157] BJ Chang-smartphone (2012) | Different sensors, including video, electrocardiography, photoplethysmography, temperature, and a three-axis accelerometer | FT: 85.5%, NM: 86.5% | 6.35 s | Yes |
| (c) M-DFD: Combine visual and non-visual features without smartphone | ||||
| Visual and non-visual features | CNN + RNN without pre-training | FT: 89.65%, NM: 89.5% | 3.45 s | NA |
| Visual and non-visual features | CNN + RNN with pre-training on scratch | FT: 90.40%, NM: 90.5% | 3.75 s | NA |
| (d) M-DFD: Combine visual and non-visual features with smartphone | ||||
| Visual and non-visual features | CNN+ RNN without pre-training | FT: 89.65%, NM: 88.5% | 3.77 s | Yes |
| Visual and non-visual features | CNN + RNN with pre-training on scratch | FT: 94.50%, NM: 92.5% | 3.85 s | Yes |
| (e) M-DFD: Combine visual and non-visual features with smartphone and Cloud | ||||
| Visual and non-visual features | CNN+ RNN without pre-training | FT: 89.65%, NM: 88.5% | 1.2 s | Yes |
| Visual and non-visual features | CNN + RNN with pre-training on scratch | FT: 94.50%, NM: 93.5% | 1.3 s | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbas, Q.; Alsheddy, A. Driver Fatigue Detection Systems Using Multi-Sensors, Smartphone, and Cloud-Based Computing Platforms: A Comparative Analysis. Sensors 2021, 21, 56. https://doi.org/10.3390/s21010056
Abbas Q, Alsheddy A. Driver Fatigue Detection Systems Using Multi-Sensors, Smartphone, and Cloud-Based Computing Platforms: A Comparative Analysis. Sensors. 2021; 21(1):56. https://doi.org/10.3390/s21010056
Chicago/Turabian StyleAbbas, Qaisar, and Abdullah Alsheddy. 2021. "Driver Fatigue Detection Systems Using Multi-Sensors, Smartphone, and Cloud-Based Computing Platforms: A Comparative Analysis" Sensors 21, no. 1: 56. https://doi.org/10.3390/s21010056
APA StyleAbbas, Q., & Alsheddy, A. (2021). Driver Fatigue Detection Systems Using Multi-Sensors, Smartphone, and Cloud-Based Computing Platforms: A Comparative Analysis. Sensors, 21(1), 56. https://doi.org/10.3390/s21010056