Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication

 , , ,
, , ,  ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- synchronization of chaotic systems with unknown time delays;
- (2)
- synchronization of chaotic systems in the presence of disturbance and uncertainty with unknown boundaries and variable parameters;
- (3)
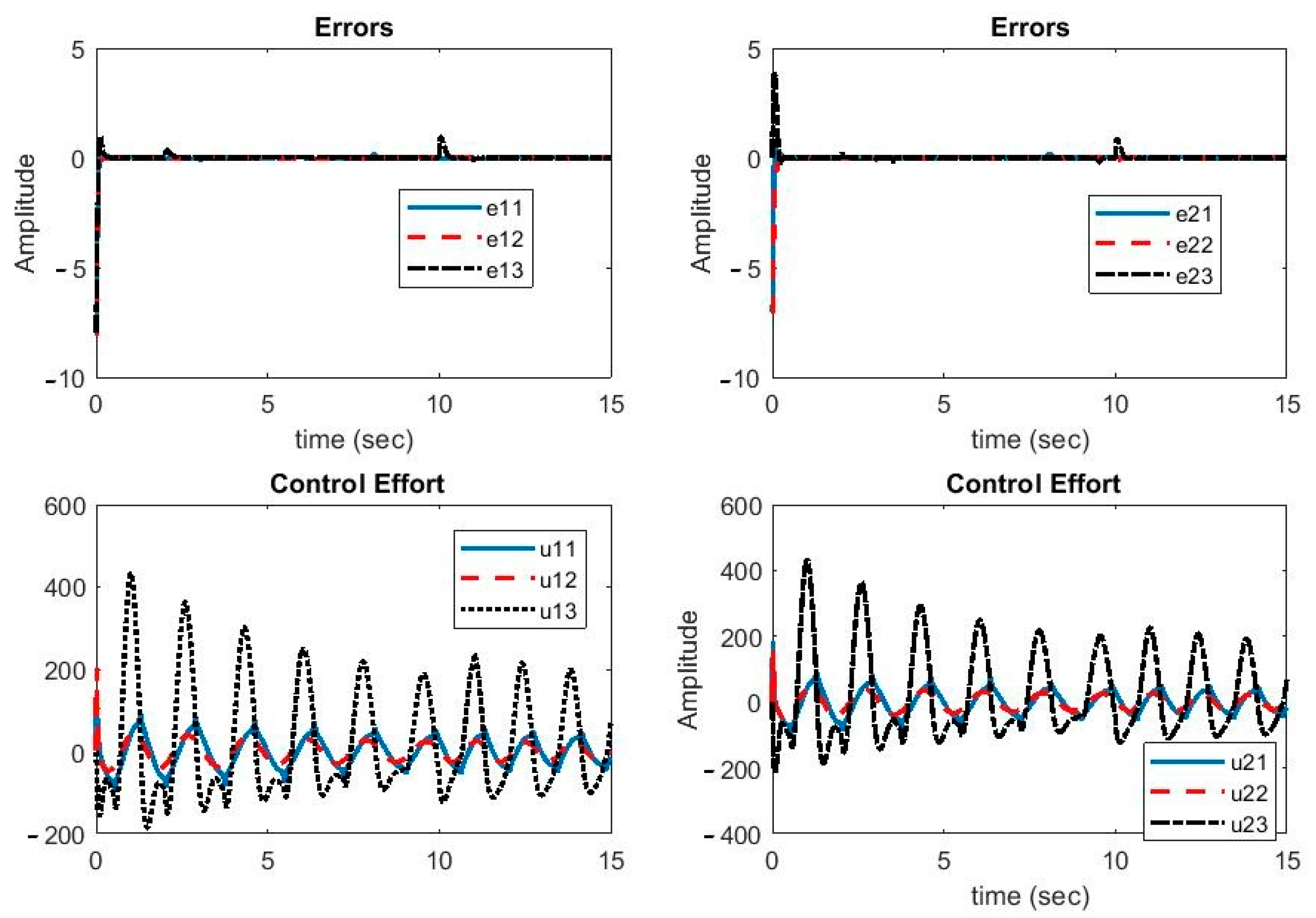
- guarantee of convergence of tracking errors and parameters estimation to zero;
- (4)
- Determining the rules for updating parameters, time delays, and disturbance and uncertainty boundaries.
2. Multi-State Synchronization of Chaotic Systems in the Presence of Disturbance and Uncertainty
3. Application in Secure Communication Based on Chaotic Masking
4. Simulation and Results
5. Discussion
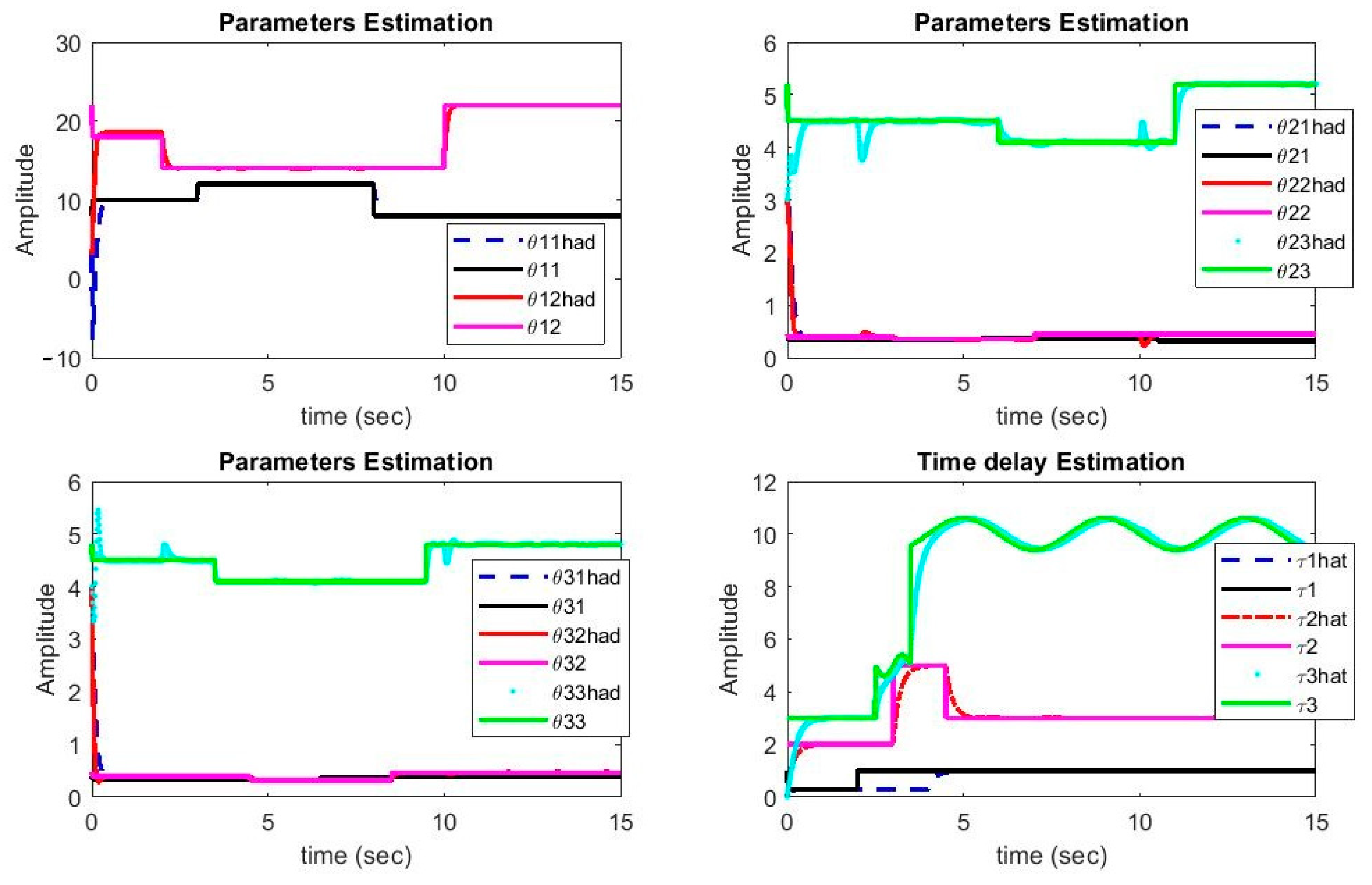
- Accurate estimation of variable time delays and parameters.
- Specifying the control laws as continuous time functions.
- Capable of dealing with disturbance and uncertainties with unknown boundaries.
- Faithful recovery of message signal in secure communication.
- Involves relatively large magnitude of control signal in a few cases (control functions ).
- Changes occur solely in a step-like manner; hence, there is a large distance between parameter changes.
- (1)
- Presence of delay and variable parameters in master and slave systems.
- (2)
- Ability to switch to different slave systems.
- (3)
- Presence of undesirable and unwanted factors such as disturbances and uncertainty.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bendoukha, S.; Abdelmalek, S.; Ouannas, A. Secure communication systems based on the synchronization of chaotic systems. In Mathematics Applied to Engineering, Modelling, and Social Issues; Springer: Cham, Switzerland, 2019; pp. 281–311. [Google Scholar]
- Mewada, D.; Dave, N.; Prajapati, R.K. A survey: Prospects of Internet of Things (IoT) using cryptography based on its subsequent challenges. Aust. J. Wirel. Technol. Mobil. Secur. 2019, 1, 28–30. [Google Scholar] [CrossRef]
- Taha, M.S.; Rahim, M.S.M.; Lafta, S.A.; Hashim, M.M.; Alzuabidi, H.M. Combination of steganography and cryptography: A short survey. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 518, p. 052003. [Google Scholar]
- AlMajed, H.; AlMogren, A. A Secure and Efficient ECC-Based Scheme for Edge Computing and Internet of Things. Sensors 2020, 20, 6158. [Google Scholar] [CrossRef] [PubMed]
- Gulsezim, D.; Zhansaya, S.; Razaque, A.; Ramina, Y.; Amsaad, F.; Almiani, M.; Oun, A. Two Factor Authentication using Twofish Encryption and Visual Cryptography Algorithms for Secure Data Communication. In 2019 Sixth International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Granada, Spain, 22–25 October 2019; IEEE: New York, NY, USA, 2019; pp. 405–411. [Google Scholar]
- Yang, T.; Wu, C.W.; Chua, L.O. Cryptography based on chaotic systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 469–472. [Google Scholar] [CrossRef]
- Crandall, R.E. Cryptographic system using chaotic dynamics. U.S. Patent 6587563, 2003. [Google Scholar]
- Liu, S.; Wei, Y.; Liu, J.; Chen, S.; Zhang, G. Multi-Scroll Chaotic System Model and Its Cryptographic Application. Int. J. Bifurc. Chaos 2020, 30, 2050186. [Google Scholar] [CrossRef]
- Pham, V.T.; Kingni, S.T.; Volos, C.; Jafari, S.; Kapitaniak, T. A simple three-dimensional fractional-order chaotic system without equilibrium: Dynamics, circuitry implementation, chaos control and synchronization. AEU Int. J. Electron. Commun. 2017, 78, 220–227. [Google Scholar] [CrossRef]
- Chen, D.; Li, S.; Wu, Q. Rejecting chaotic disturbances using a super-exponential-zeroing neurodynamic approach for synchronization of chaotic sensor systems. Sensors 2019, 19, 74. [Google Scholar] [CrossRef]
- Pham, V.T.; Ouannas, A.; Volos, C.; Kapitaniak, T. A simple fractional-order chaotic system without equilibrium and its synchronization. AEU Int. J. Electron. Commun. 2018, 86, 69–76. [Google Scholar] [CrossRef]
- Zare, A.; Mirrezapour, S.Z.; Hallaji, M.; Shoeibi, A.; Jafari, M.; Ghassemi, N.; Mosavi, A. Robust Adaptive Synchronization of a Class of Uncertain Chaotic Systems with Unknown Time-Delay. Appl. Sci. 2020, 10, 8875. [Google Scholar] [CrossRef]
- Tirandaz, H.; Hajipour, A. Adaptive synchronization and anti-synchronization of TSUCS and Lü unified chaotic systems with unknown parameters. Optik 2017, 130, 543–549. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Pham, V.T.; Volos, C. Adaptive control, synchronization and circuit simulation of a memristor-based hyperchaotic system with hidden attractors. In Advances in Memristors, Memristive Devices and Systems; Springer: Cham, Switzerland, 2017; pp. 101–130. [Google Scholar]
- Khan, A. Hybrid function projective synchronization of chaotic systems via adaptive control. Int. J. Dyn. Control 2017, 5, 1114–1121. [Google Scholar] [CrossRef]
- Mani, P.; Rajan, R.; Shanmugam, L.; Joo, Y.H. Adaptive control for fractional order induced chaotic fuzzy cellular neural networks and its application to image encryption. Inf. Sci. 2019, 491, 74–89. [Google Scholar] [CrossRef]
- Chen, X.; Park, J.H.; Cao, J.; Qiu, J. Adaptive synchronization of multiple uncertain coupled chaotic systems via sliding mode control. Neurocomputing 2018, 273, 9–21. [Google Scholar] [CrossRef]
- Song, C.; Fei, S.; Cao, J.; Huang, C. Robust synchronization of fractional-order uncertain chaotic systems based on output feedback sliding mode control. Mathematics 2019, 7, 599. [Google Scholar] [CrossRef]
- Shukla, M.K.; Sharma, B.B. Control and synchronization of a class of uncertain fractional order chaotic systems via adaptive backstepping control. Asian J. Control 2018, 20, 707–720. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Zhao, Z.S.; Zhang, J.; Wang, R.K.; Li, Z. Adaptive fuzzy control design for synchronization of chaotic time-delay system. Inf. Sci. 2020, 535, 225–241. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Ghaemi, S.; Kaynak, O. Robust predictive synchronization of uncertain fractional-order time-delayed chaotic systems. Soft Comput. 2019, 23, 6883–6898. [Google Scholar] [CrossRef]
- Xu, S.; Lv, H.; Liu, H.; Liu, A. Robust Control of Disturbed Fractional-Order Economical Chaotic Systems with Uncertain Parameters. Complexity 2019, 2019. [Google Scholar] [CrossRef]
- Chen, H.C.; Liau, B.Y.; Hou, Y.Y. Hardware implementation of Lorenz circuit systems for secure chaotic communication applications. Sensors 2013, 13, 2494–2505. [Google Scholar] [CrossRef]
- Cicek, S.; Kocamaz, U.E.; Uyaroğlu, Y. Secure chaotic communication with jerk chaotic system using sliding mode control method and its real circuit implementation. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 687–698. [Google Scholar] [CrossRef]
- Khan, A.; Jahanzaib, L.S.; Trikha, P. Secure communication: Using parallel synchronization technique on novel fractional order chaotic system. IFAC PapersOnLine 2020, 53, 307–312. [Google Scholar] [CrossRef]
- Yu, F.; Zhang, Z.; Liu, L.; Shen, H.; Huang, Y.; Shi, C.; Xu, Q. Secure communication scheme based on a new 5D multistable four-wing memristive hyperchaotic system with disturbance inputs. Complexity 2020, 2020. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Shu, M.; Zhang, F.; Leng, S.; Sun, X. Secure communication of fractional complex chaotic systems based on fractional difference function synchronization. Complexity 2019, 2019. [Google Scholar] [CrossRef]
- Wang, T.; Wang, D.; Wu, K. Chaotic adaptive synchronization control and application in chaotic secure communication for industrial Internet of Things. IEEE Access 2018, 6, 8584–8590. [Google Scholar] [CrossRef]
- Yu, W.; Wang, J.; Wang, J.; Zhu, H.; Li, M.; Li, Y.; Jiang, D. Design of a new seven-dimensional hyperchaotic circuit and its application in secure communication. IEEE Access 2019, 7, 125586–125608. [Google Scholar] [CrossRef]
- Chen, Y.J.; Chou, H.G.; Wang, W.J.; Tsai, S.H.; Tanaka, K.; Wang, H.O.; Wang, K.C. A polynomial-fuzzy-model-based synchronization methodology for the multi-scroll Chen chaotic secure communication system. Eng. Appl. Artif. Intell. 2020, 87, 103251. [Google Scholar] [CrossRef]
- He, W.; Luo, T.; Tang, Y.; Du, W.; Tian, Y.C.; Qian, F. Secure communication based on quantized synchronization of chaotic neural networks under an event-triggered strategy. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31. [Google Scholar] [CrossRef]
- A Rahman, Z.A.S.; Al-Kashoash, H.A.; Ramadhan, S.M.; Al-Yasir, Y.I. Adaptive Control Synchronization of a Novel Memristive Chaotic System for Secure Communication Applications. Inventions 2019, 4, 30. [Google Scholar] [CrossRef]
- Ouannas, A.; Bendoukha, S.; Volos, C.; Boumaza, N.; Karouma, A. Synchronization of fractional hyperchaotic Rabinovich systems via linear and nonlinear control with an application to secure communications. Int. J. Control. Autom. Syst. 2019, 17, 2211–2219. [Google Scholar] [CrossRef]
- Wang, W.; Jia, X.; Luo, X.; Kurths, J.; Yuan, M. Fixed-time synchronization control of memristive MAM neural networks with mixed delays and application in chaotic secure communication. Chaos Solitons Fractals 2019, 126, 85–96. [Google Scholar] [CrossRef]
- Wang, J.; Yu, W.; Wang, J.; Zhao, Y.; Zhang, J.; Jiang, D. A new six-dimensional hyperchaotic system and its secure communication circuit implementation. Int. J. Circuit Theory Appl. 2019, 47, 702–717. [Google Scholar] [CrossRef]
- Zirkohi, M.M. An efficient approach for digital secure communication using adaptive backstepping fast terminal sliding mode control. Comput. Electr. Eng. 2019, 76, 311–322. [Google Scholar] [CrossRef]
- Chen, X.; Park, J.H.; Cao, J.; Qiu, J. Sliding mode synchronization of multiple chaotic systems with uncertainties and disturbances. Appl. Math. Comput. 2017, 308, 161–173. [Google Scholar] [CrossRef]
- Ren, H.P.; Bai, C.; Huang, Z.Z.; Grebogi, C. Secure communication based on hyperchaotic Chen system with time-delay. Int. J. Bifurc. Chaos 2017, 27, 1750076. [Google Scholar] [CrossRef]
- Lin, T.C.; Huang, F.Y.; Du, Z.; Lin, Y.C. Synchronization of fuzzy modeling chaotic time delay memristor-based Chua’s circuits with application to secure communication. Int. J. Fuzzy Syst. 2015, 17, 206–214. [Google Scholar] [CrossRef]
- Kwon, O.M.; Park, J.H.; Lee, S.M. Secure communication based on chaotic synchronization via interval time-varying delay feedback control. Nonlinear Dyn. 2011, 63, 239–252. [Google Scholar] [CrossRef]
- Ali, T.S.; Ali, R. A Novel Medical Image Signcryption Scheme Using TLTS and Henon Chaotic Map. IEEE Access 2020, 8, 71974–71992. [Google Scholar] [CrossRef]
- Shoeibi, A.; Ghassemi, N.; Khodatars, M.; Jafari, M.; Hussain, S.; Alizadehsani, R.; Zare, A. Epileptic seizure detection using deep learning techniques: A Review. arXiv 2020, 2007, 01276. [Google Scholar]
- Shoeibi, A.; Ghassemi, N.; Alizadehsani, R.; Rouhani, M.; Hosseini-Nejad, H.; Khosravi, A.; Nahavandi, S. A comprehensive comparison of handcrafted features and convolutional autoencoders for epileptic seizures detection in EEG signals. Exp. Syst. Appl. 2020, 163, 113788. [Google Scholar] [CrossRef]
- Martin-Isla, C.; Campello, V.M.; Izquierdo, C.; Raisi-Estabragh, Z.; Baeßler, B.; Petersen, S.E.; Lekadir, K. Image-based cardiac diagnosis with machine learning: A review. Front. Cardiovasc. Med. 2020, 7, 1. [Google Scholar] [CrossRef]
- Alizadehsani, R.; Khosravi, A.; Roshanzamir, M.; Abdar, M.; Sarrafzadegan, N.; Shafie, D.; Bishara, A. Coronary Artery Disease Detection Using Artificial Intelligence Techniques: A Survey of Trends, Geographical Differences and Diagnostic Features 1991–2020. Comput. Biol. Med. 2020, 128, 104095. [Google Scholar] [CrossRef]
- Shoeibi, A.; Khodatars, M.; Alizadehsani, R.; Ghassemi, N.; Jafari, M.; Moridian, P. Alizadehsani, Z. Automated detection and forecasting of covid-19 using deep learning techniques: A review. arXiv 2020, 2007, 10785. [Google Scholar]
- Kumar, A.; Gupta, P.K.; Srivastava, A. A review of modern technologies for tackling COVID-19 pandemic. Diabet. Metab. Syndr. Clin. Res. Rev. 2020. [CrossRef] [PubMed]
- Abd-Elaziz, E.M.; Marin, M.; Othman, M.I. On the effect of Thomson and initial stress in a thermo-porous elastic solid under GN electromagnetic theory. Symmetry 2019, 11, 413. [Google Scholar] [CrossRef]
- Vlase, S.; Marin, M.; Öchsner, A.; Scutaru, M.L. Motion equation for a flexible one-dimensional element used in the dynamical analysis of a multibody system. Contin. Mech. Thermodyn. 2019, 31, 715–724. [Google Scholar] [CrossRef]
- Jian, B.L.; Wang, C.C.; Chang, J.Y.; Su, X.Y.; Yau, H.T. Machine tool chatter identification based on dynamic errors of different self-synchronized chaotic systems of various fractional orders. IEEE Access 2019, 7, 67278–67286. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kekha Javan, A.A.; Shoeibi, A.; Zare, A.; Hosseini Izadi, N.; Jafari, M.; Alizadehsani, R.; Moridian, P.; Mosavi, A.; Acharya, U.R.; Nahavandi, S. Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication. Sensors 2021, 21, 254. https://doi.org/10.3390/s21010254
Kekha Javan AA, Shoeibi A, Zare A, Hosseini Izadi N, Jafari M, Alizadehsani R, Moridian P, Mosavi A, Acharya UR, Nahavandi S. Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication. Sensors. 2021; 21(1):254. https://doi.org/10.3390/s21010254
Chicago/Turabian StyleKekha Javan, Ali Akbar, Afshin Shoeibi, Assef Zare, Navid Hosseini Izadi, Mahboobeh Jafari, Roohallah Alizadehsani, Parisa Moridian, Amir Mosavi, U. Rajendra Acharya, and Saeid Nahavandi. 2021. "Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication" Sensors 21, no. 1: 254. https://doi.org/10.3390/s21010254
APA StyleKekha Javan, A. A., Shoeibi, A., Zare, A., Hosseini Izadi, N., Jafari, M., Alizadehsani, R., Moridian, P., Mosavi, A., Acharya, U. R., & Nahavandi, S. (2021). Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication. Sensors, 21(1), 254. https://doi.org/10.3390/s21010254