1. Introduction
The Internet of Things (IoT) has become an essential part of our lives. The total number of connected IoT devices is projected to rise to almost 76 billion worldwide by 2025, a fivefold increase in ten years [
1]. Those devices are, in most cases, supplied by batteries. The use and replacement of batteries are often two of the most expensive aspects of IoT devices, and are also not environmentally friendly. The environmental impact of finding all the lithium required to enable enough energy storage has already become a severe issue in itself. Nevertheless, the impact caused by the extraction of lithium for the components of the Li-ion battery is less than 2.3%. The primary cause of the environmental burden is the supply of copper and aluminum [
2]. Moving to recovery, recycling, and reuse of lithium battery materials is strongly encouraged. It has become clear that particular attention should be paid to the method of powering connected devices. Some solutions for increasing the lifetime of the battery are reducing power consumption, increasing energy efficiency, and extending the energy storage capacity.
Power management is one of the primary concerns in sensor networks. Some devices are powered by harvesting energy from the surrounding environment. Due to the size and price of the needed harvester, this option is often put away. A good compromise to overcome this issue is to combine the harvester with an energy storage element; for example, a battery. In such systems, the life of the battery is sometimes extended by up to a decade, even if only a small amount of energy is available in the environment. Such a combined powering structure shifts the need to have sufficient energy extracted from a source to the need to have a source present.
One of the energy sources that is the most omnipresent, but carries little energy, is sound. It is omnipresent, and even if it is not, in some sporadic cases, sound can even be produced from a distance. Sound is an essential factor in monitoring the activity of an environment. It helps to catalog wildlife, represent traffic, or even measure sound pollution. One of the main problems with such devices is that they require quite a large amount of power to supply microphones (mW/microphone) and to make the needed spectrum analysis. Therefore, harvesting energy from sound seems to be adequate, but challenging. The process used here to harvest energy out of sound is called triboelectrification, a process that uses electrostatic charges created on the surface of materials with different electron affinities. Since the creation of the first triboelectric nanogenerator in 2012, it is clear that a new way of harvesting energy was born. In 2016, the process was modeled in the book called “Triboelectric nanogenerators” [
3], where every contact mode, equivalent circuit diagram, power characterization, and more were discussed. The author, Pr. Z.L. Wang, achieved a notable power density of 50 mW/cm
. This technology, which has enjoyed a growing interest, has inspired, through its structure and use, a lot of innovative works, such as: triboelectric and pyroelectric hybrid harvesters [
4] and electrochromic energy harvesters [
5]. Thanks to their properties, triboelectric devices are often used as sensors and harvesters at the same time [
6].
Congestion severely affects our minds and costs billions of euros. Last year, for example, it cost over 300 billion dollars in the U.S. according to INRIX, a transportation consulting firm conducting large-scale research on global vehicular traffic. The U.S. experienced an increase in cost of 10 billion dollars since 2016. Our application concerns the mobility of priority vehicles, such as police cars or ambulances. Those kinds of vehicles need to move fast. They are slowed down due to traffic jams, traffic lights, and other various circumstances.
The solutions proposed to address this problem consist of measuring information like vehicle count, distance, and speed using visual sensing methods [
7] or on-board transceivers [
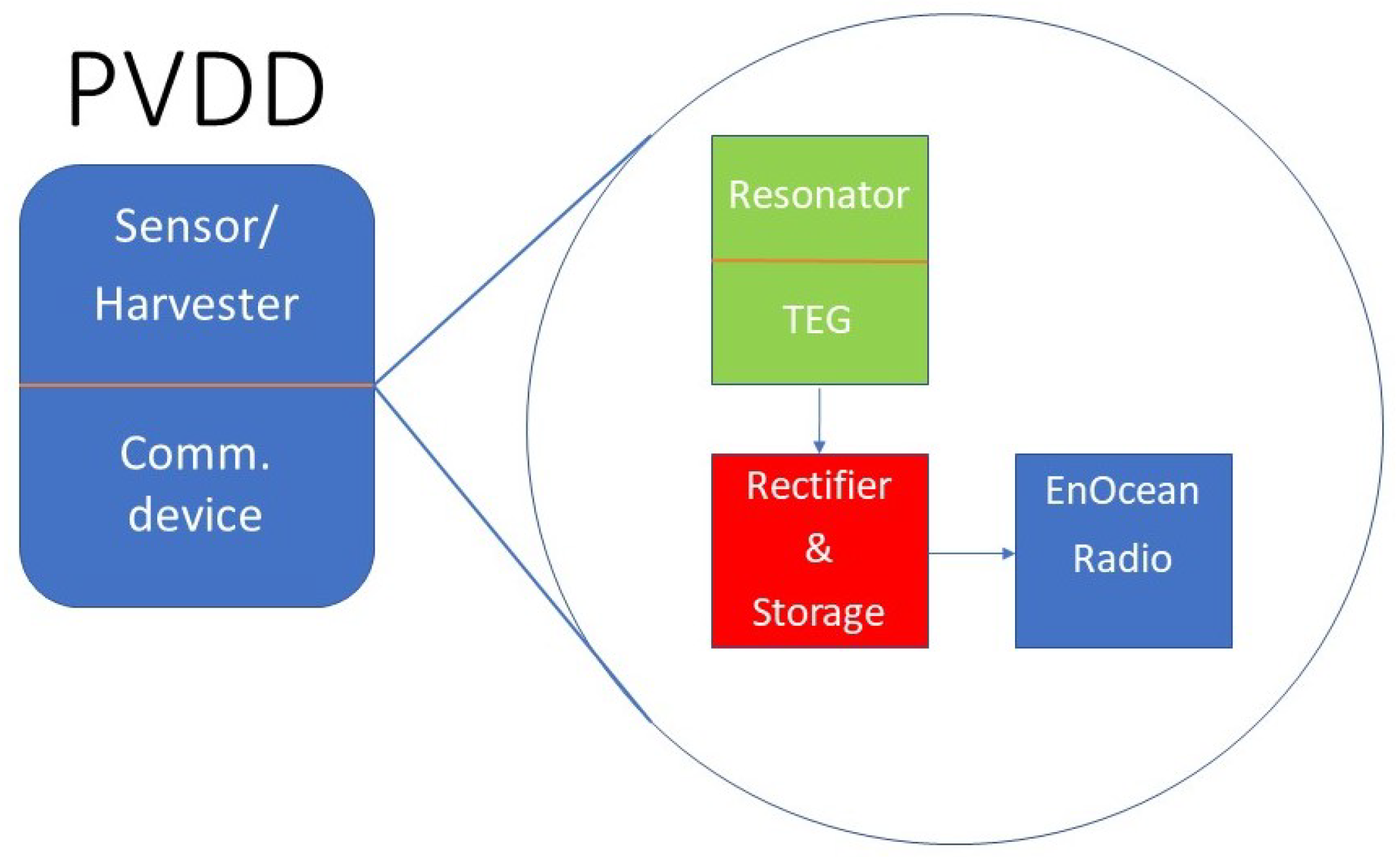
8]. The information is sent to a traffic management center to manage emergency traffic efficiently. A lot of processing power and speed are needed, but are not always available where monitoring is needed. If the system relies on vehicles equipped with transceivers, the vehicles that do not use such transceivers will not be detected or taken into account. To avoid these issues, we developed a device that can detect, thanks to a triboelectric sensor/harvester, different kinds of priority vehicles, and can send the data to, for example, a gateway or a traffic light in such a way that the traffic light can adapt its light scheme. The developed device produces its own energy and can be placed in a sensor network.
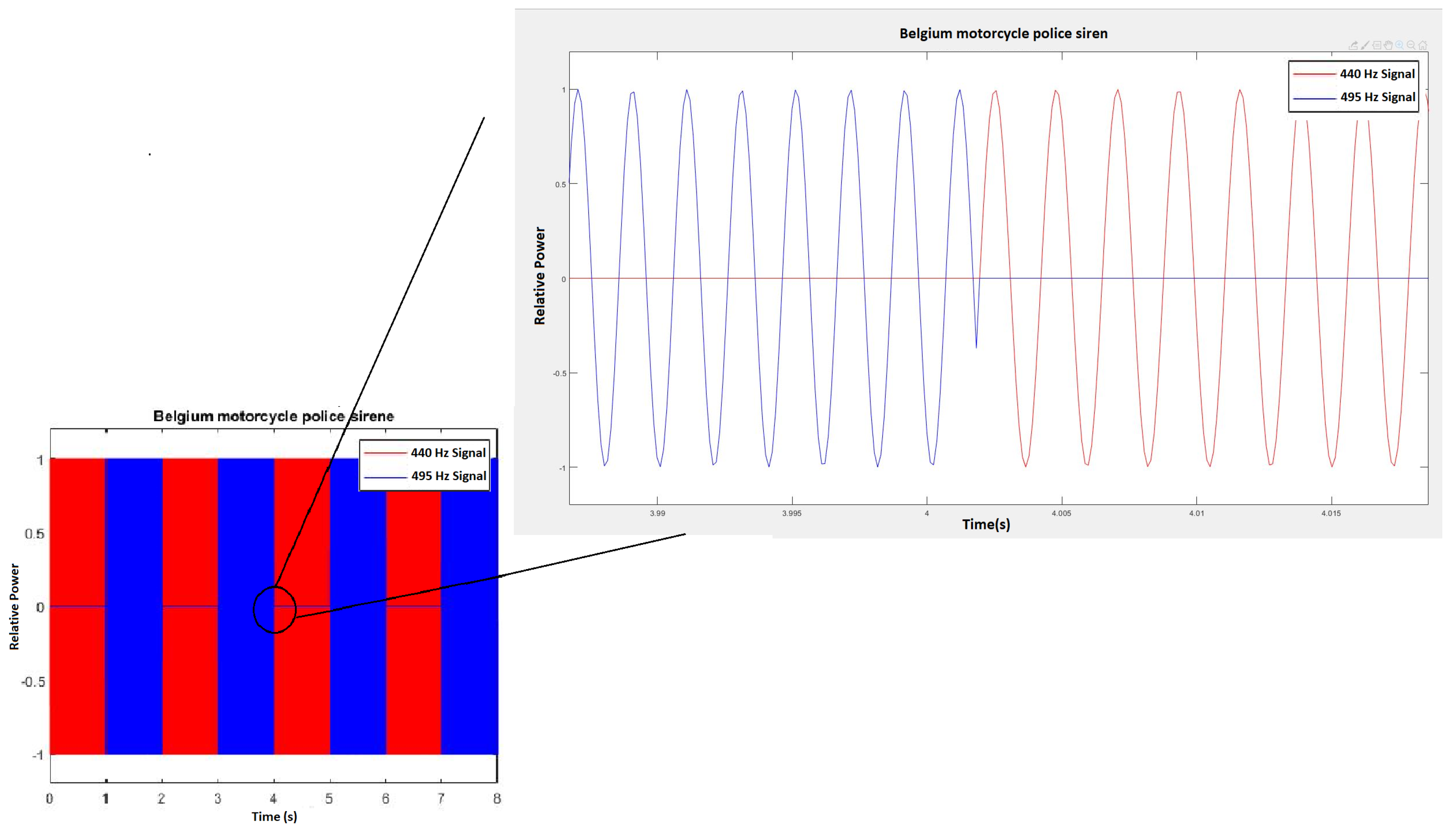
In this paper, we will propose and describe a novel self-powering priority vehicle detection device that relies on the acoustic emissions of the priority vehicle’s siren. In
Section 2, we will explain the acoustic emission profile of the siren. Based on that emission profile, a dedicated sensor—harvester was designed, built, and tested. Then, an application scenario is discussed, in which multiple devices are deployed to form a sensor network.
Section 3 gives a review of the test results.
3. Results
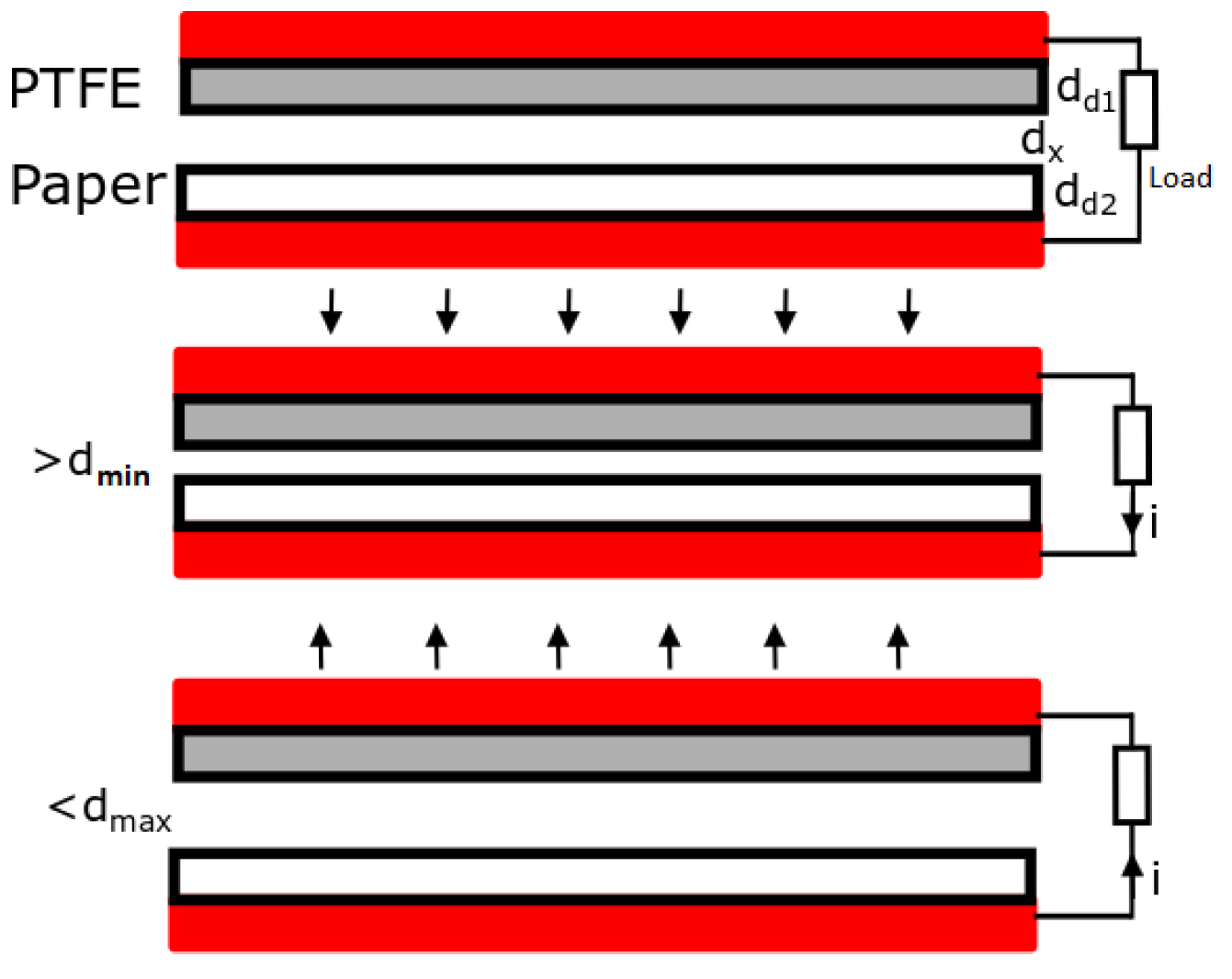
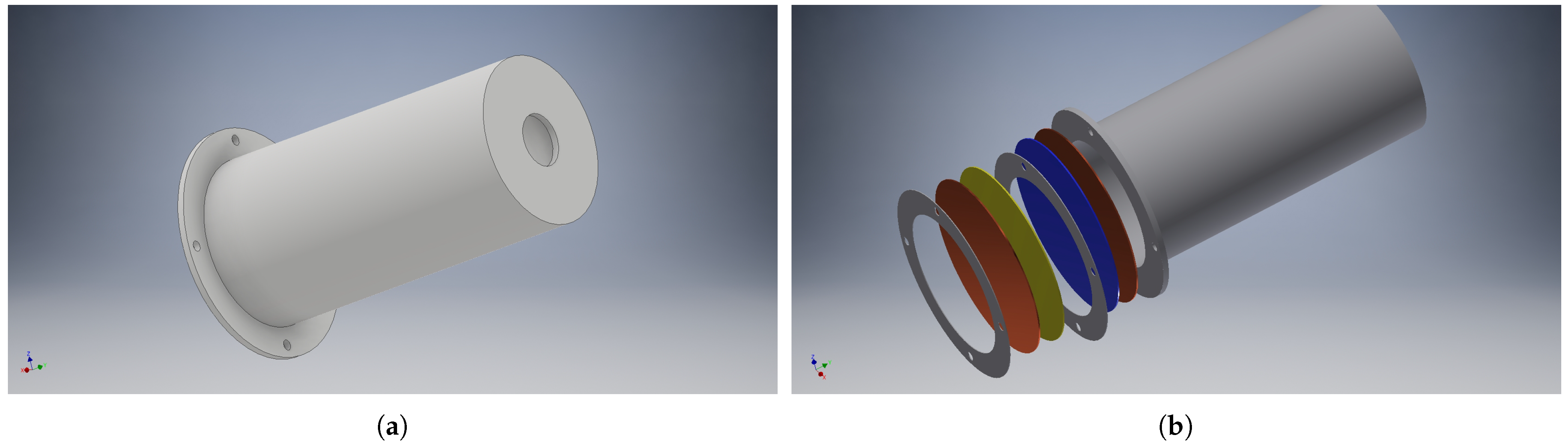
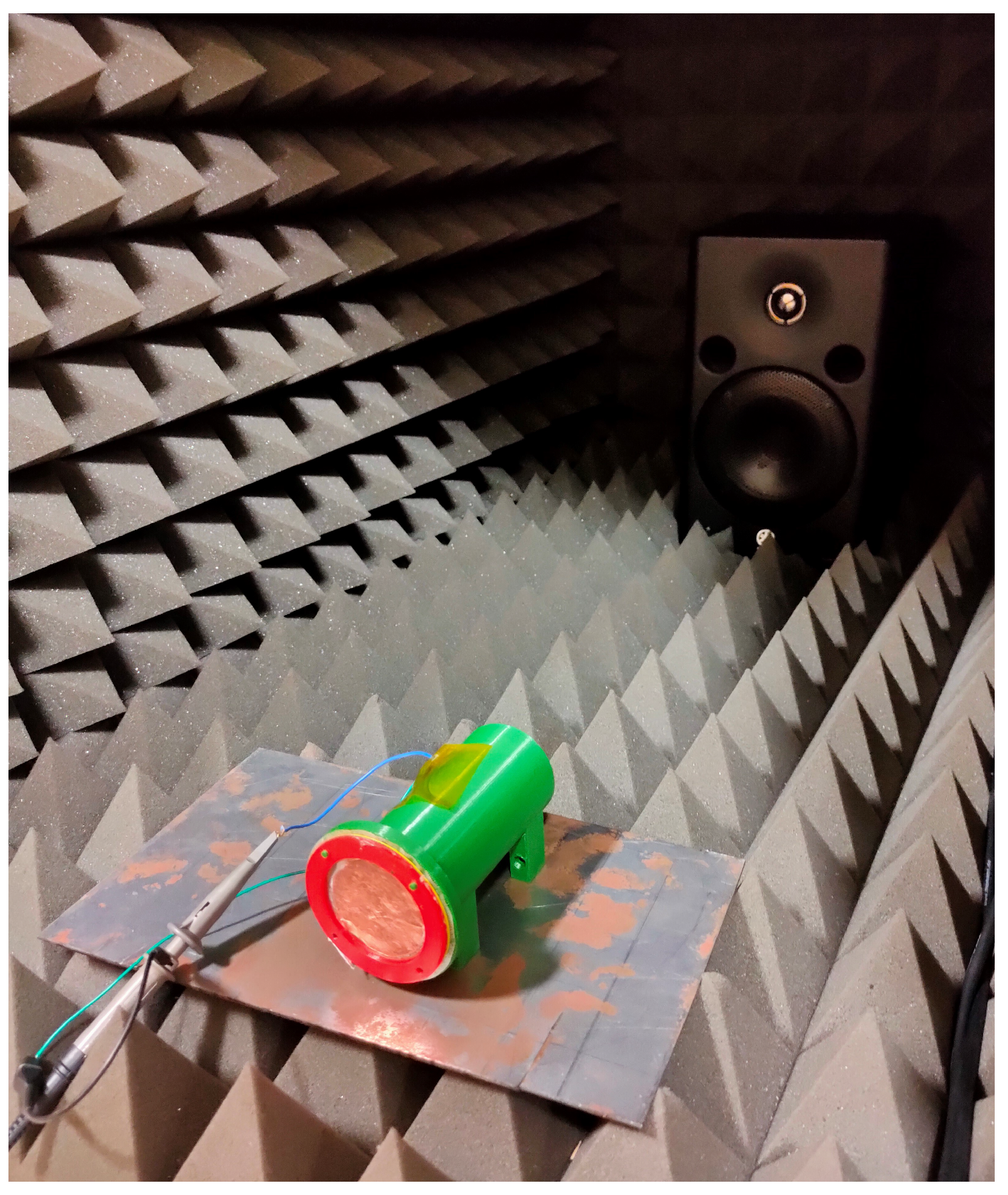
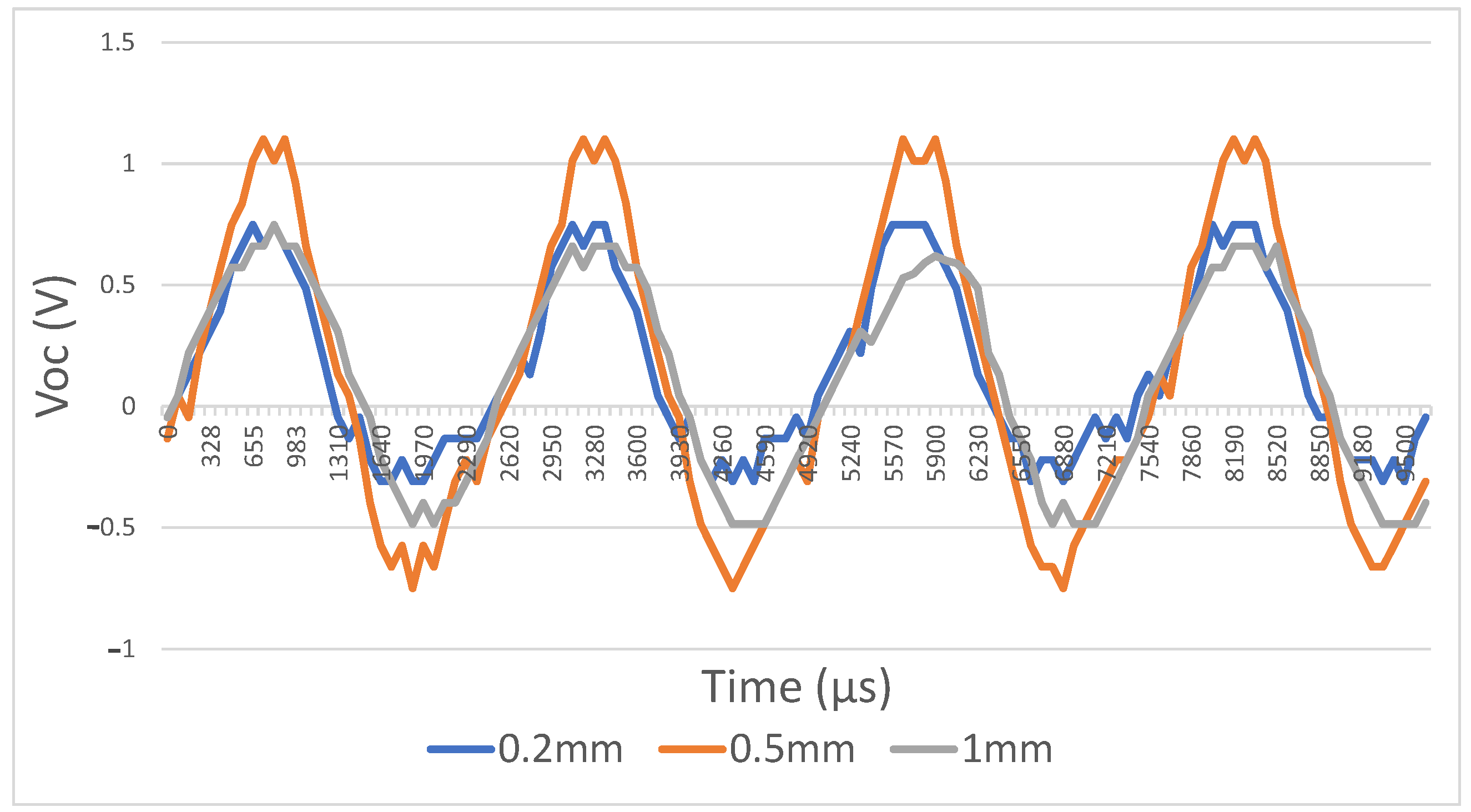
A speaker was placed two meters away from the device to trigger the harvester at a frequency of 495 Hz at 95 dB (measurement instruments used: MSOX3012A mixed-signal oscilloscope, INA139 current sensor, UMIK-2 minidsp measurement microphone, and Fluke 175 multimeter). Firstly, the dielectric layers were made from woven steel on one side and teflon on the other side. The first parameter we tested was the maximum contact gap distance. Three different-sized spacers (200
m, 500
m, and 1 mm) were printed. The best results were obtained at a distance of 500
m (
Table 8),
Figure 13. One-millimeter spacing performed more poorly because it was equal to approximately seven times the effective thickness of the dielectrics, which is near the limit, resulting in zero power output. The 200
m spacing performed more poorly because it induced little possibility for movement.
Next, we tested techniques to enhance the power output by combining different materials’ advantages. Here, carbon nanotubes were added between the dielectric layer and the electrode to lower the contact resistance. Another test was also performed by introducing barium titanate between those layers. Barium titanate is an oxide, and thus has a highly positive triboelectric affinity.
Carbon nanotubes have better carrier mobility and higher intrinsic carrier density than the superposed dielectric layer, resulting in worse outputs (
Figure 14). On the other hand, barium titanate showed very promising improvements by increasing the layer’s total storage charge, reaching a peak-to-peak voltage of 3.1 V.
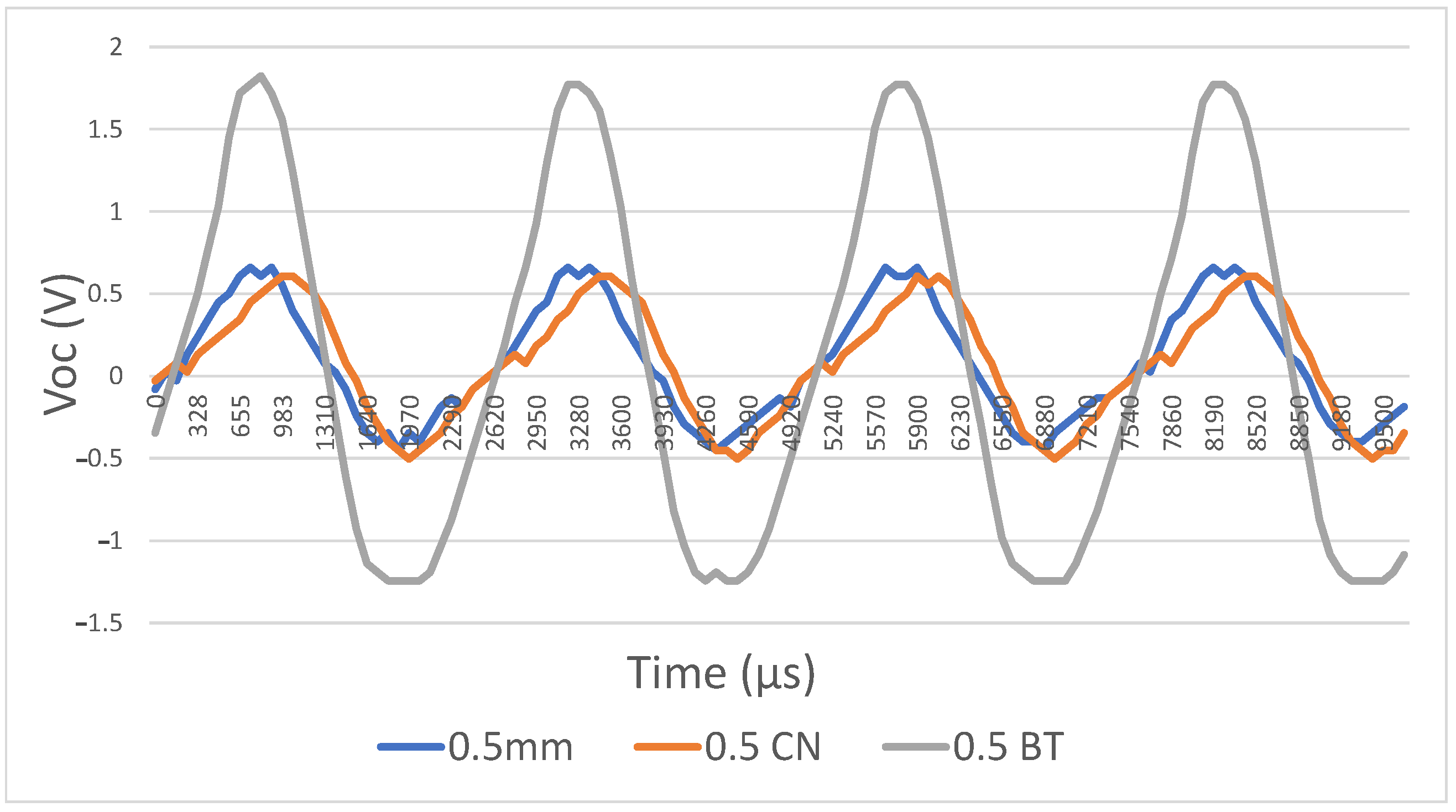
For the last test on the harvester structure, we adapted the material of the dielectric layers.
Table 8 depicts the results of those tests. We achieved the highest output voltage with paper and teflon as the dielectric layer. We further improved the TENG by adding barium titanate between the electrode and the paper layer. The results are shown in
Figure 15.
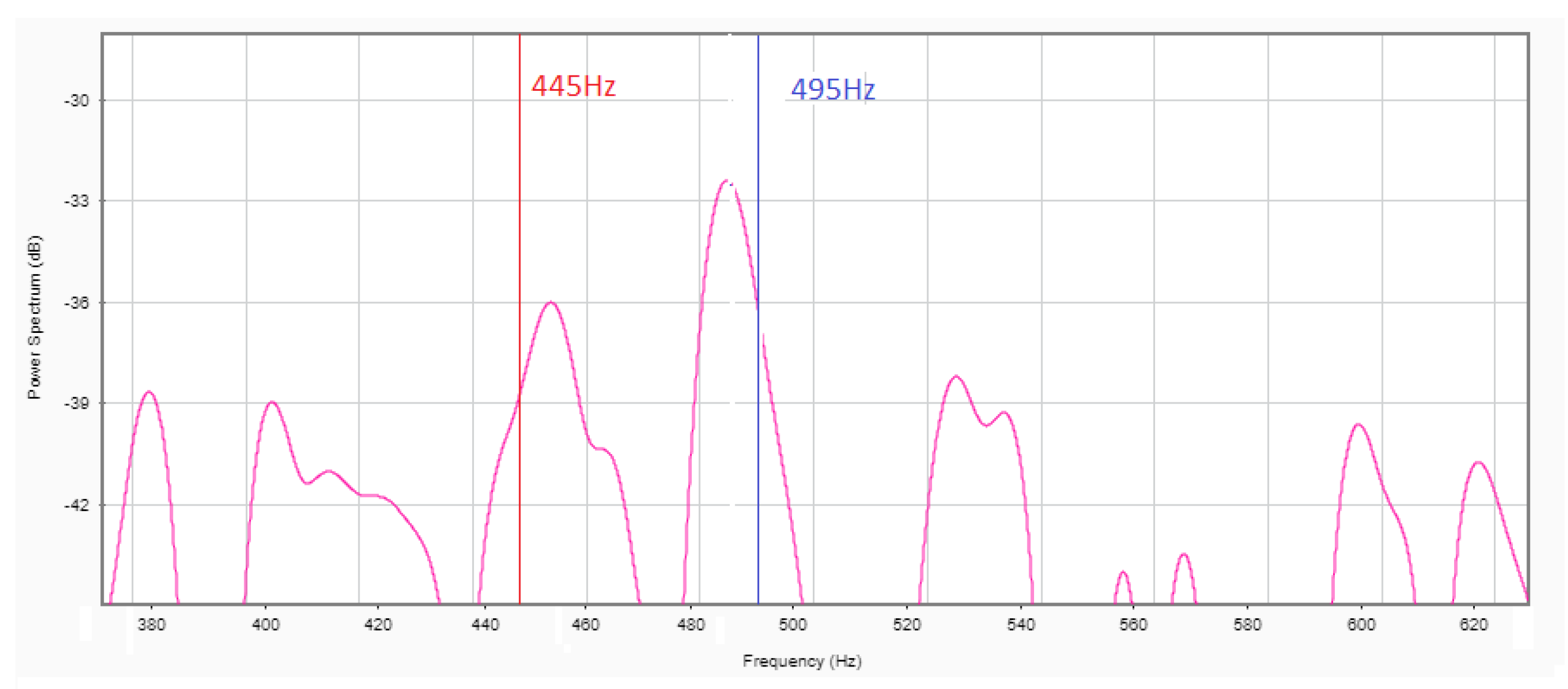
Now that the structure of the harvester/sensor is settled, we can test its frequency response.
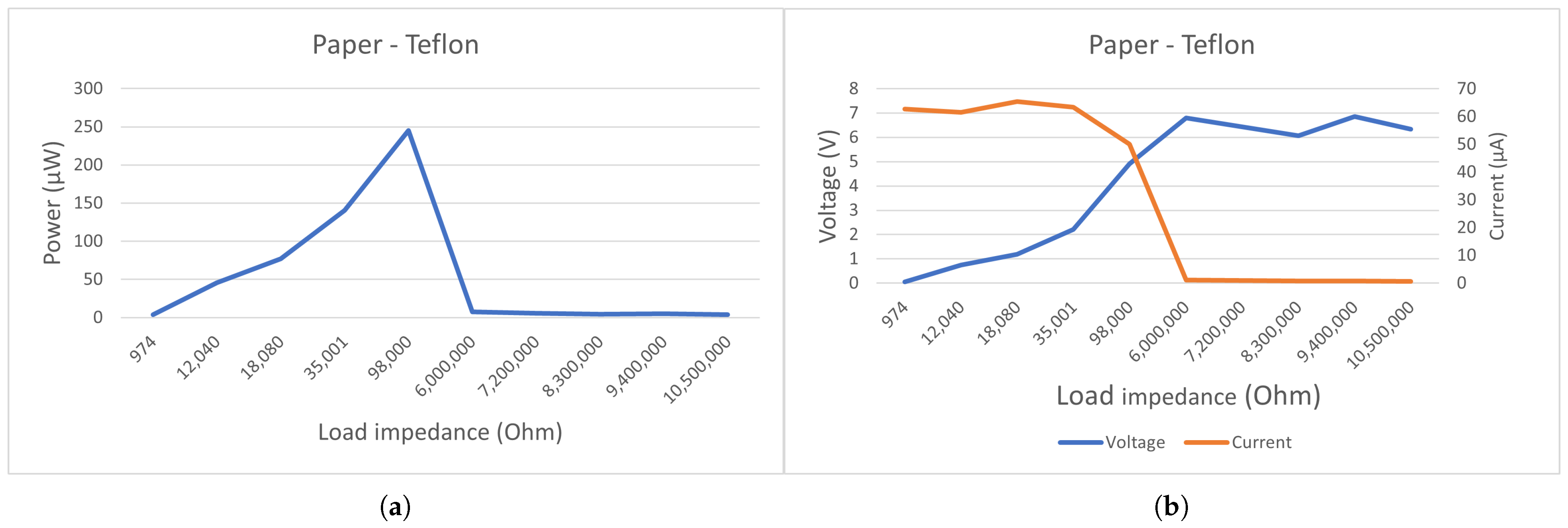
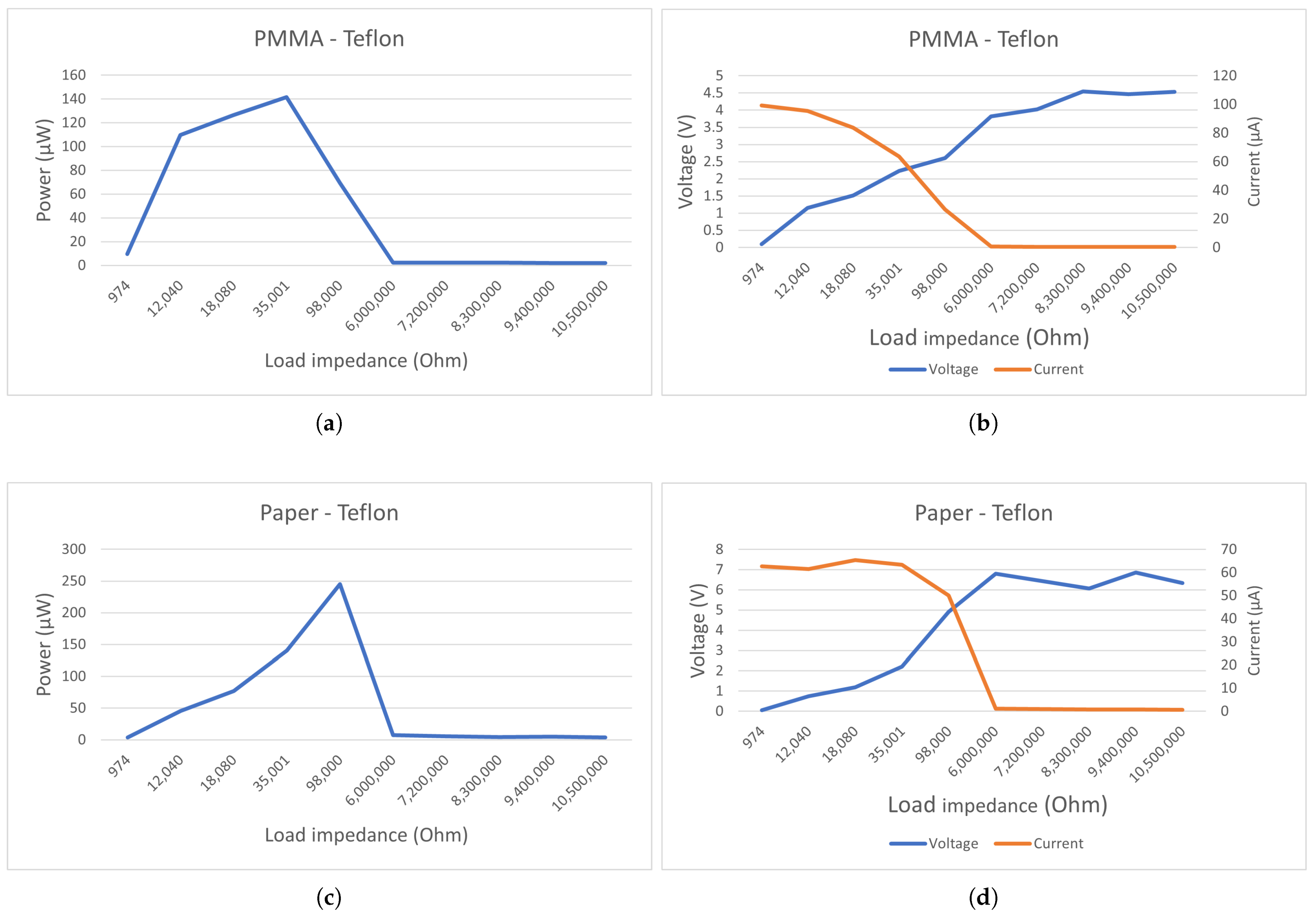
Figure 16 shows that the response is mainly centered around 490 Hz. The response lies ideally for the 495 and 445 Hz signals of a priority vehicle. The other peaks are, respectively, 6 and 3 db lower, which makes the identification of a priority vehicle simple. With this setup, the highest power output we found was equal to 245
W at a voltage of 4.9 V. We did the same test with PMMA as a dielectric layer, but it performed less well (
Figure 17) with 141
W at a voltage of 2.2 V. From
Figure 17a,b we can deduct that the best matching load impedance for this setup using paper lies around 100 k
, and using PMMA
Figure 17c,d, it lies around 35 k
.
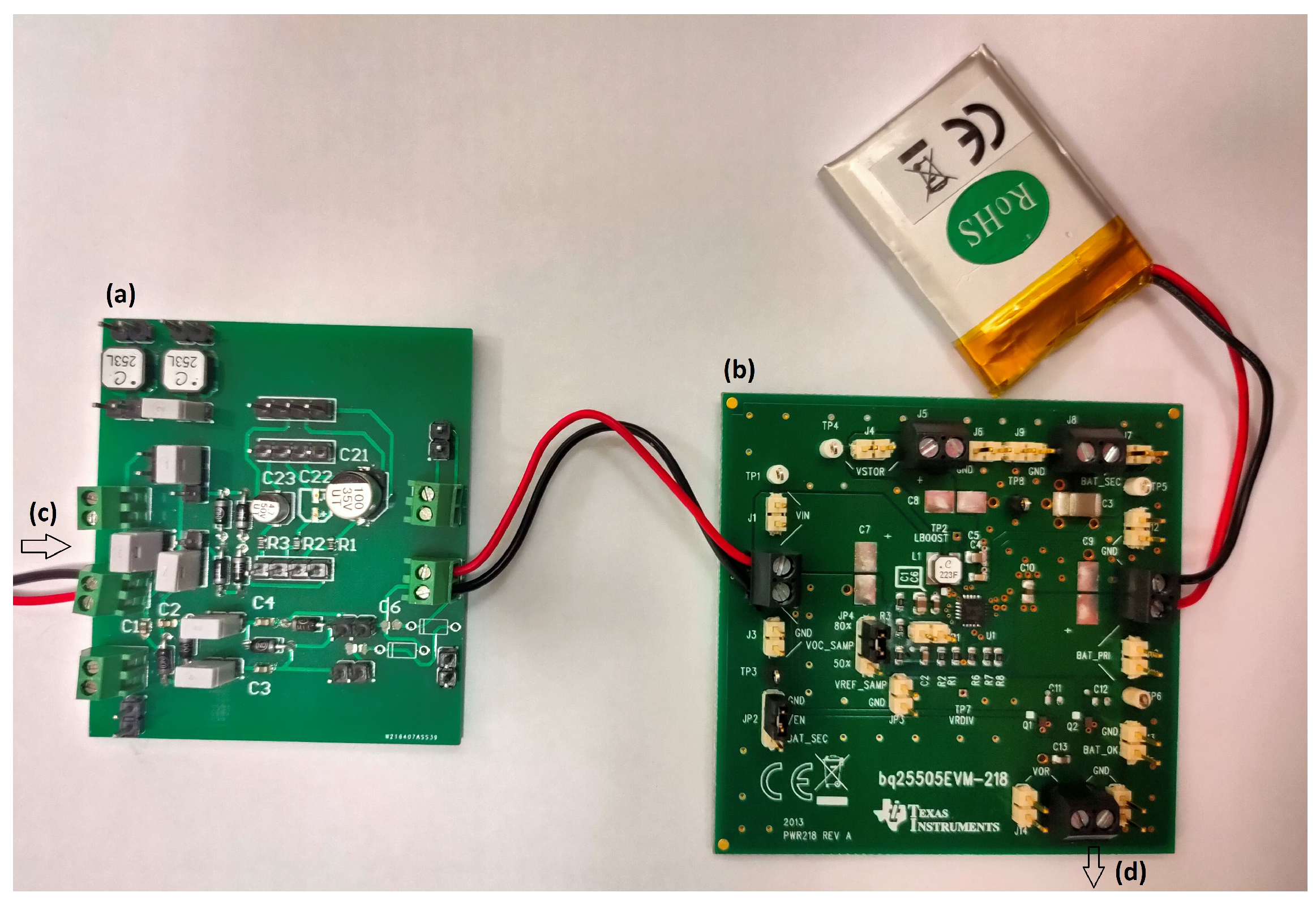
With the presented method, sufficient energy is produced to power the nodes.
Table 9 shows how long it takes for a particular node to have enough energy to receive or transmit a message.
The most extended period to needed to harvest energy is approximately four seconds for the RN2483. The (traffic) light will power the node that is placed on it. The other nodes can store enough energy while a priority vehicle passes by to transmit and receive many messages.
4. Conclusions
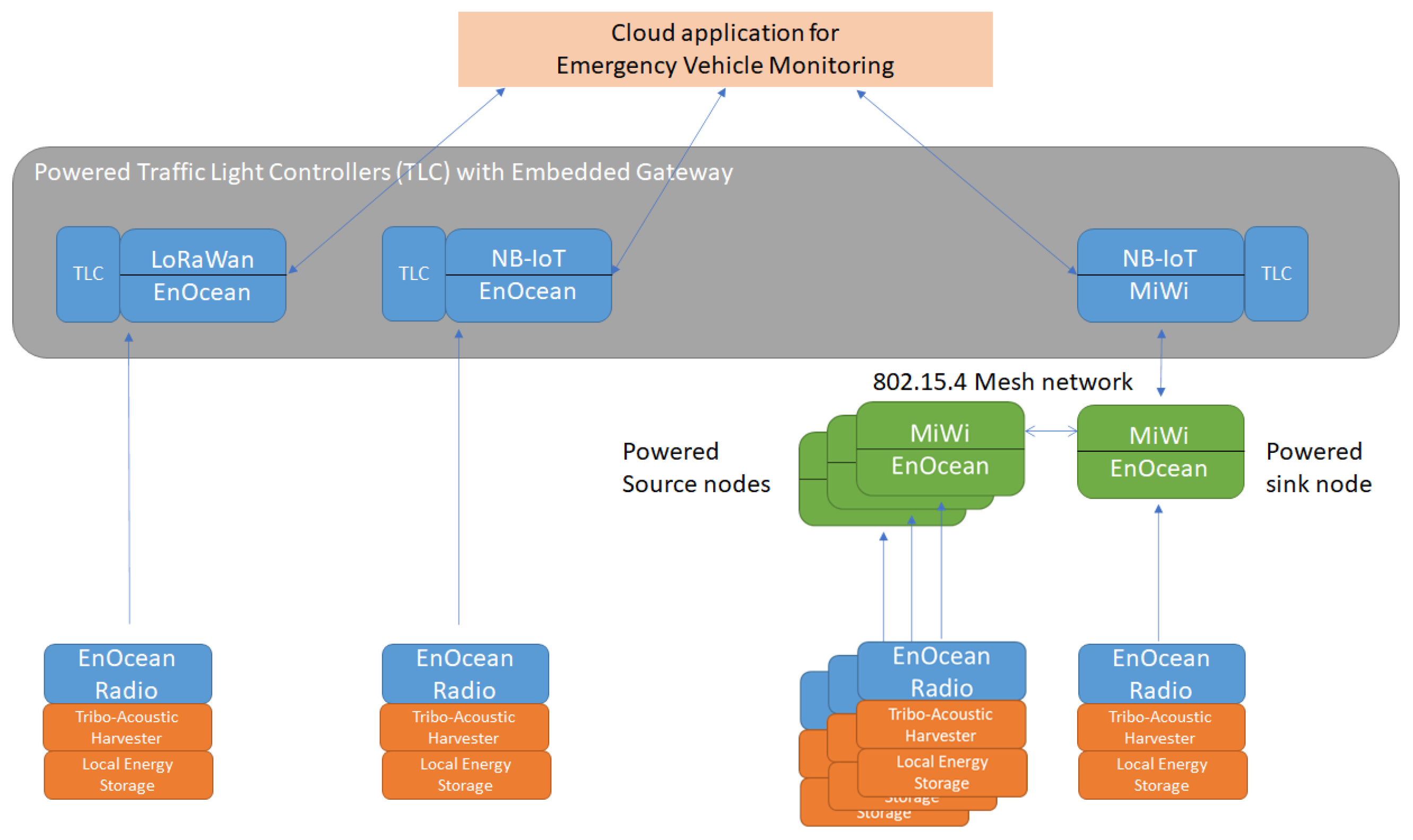
Priority vehicles, such as police cars or ambulances, regularly need to move fast. They are often slowed down, resulting in severe costs. We developed a device that can detect different kinds of priority vehicles and send the data to control traffic lights. The device containing our 3D-printed harvester dedicated to harvesting a 445/495 Hz mixed source can detect acoustic energy at the same time. Our device has a high output performance (245 W) compared to other low-cost acoustic solutions, is self-powering, and is small (no array of harvesters needed). Furthermore, we also presented several network architecture possibilities that integrate a self-powered tribo-acoustic harvester and sensor as part of the priority vehicle detection system. In all cases, the self-powered sensor uses the EnOcean communication protocol to communicate directly with a powered gateway. Two different interconnection schemes can be adopted. The first interconnection scheme connects the EnOcean radio with a smart traffic light controller, which includes an embedded gateway that supports a full-stack IoT protocol (NB-IoT or LoRaWan) and an EnOcean Radio. The second connection scheme provides a two-layered interconnection scheme. The first layer connects the self-powered sensors with a powered mesh network. The mesh network routes all the data to a sink, from which the data are sent further to a smart traffic light controller.
The next steps in our research will consist of the deployment of the PVDDs proposed in this work in outdoor scenarios for long-term testing. Improvements to the PVDDs that are based on simulations and measured performance results will be worked out.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}