Gesture Recognition Based on Multiscale Singular Value Entropy and Deep Belief Network



Abstract
1. Introduction
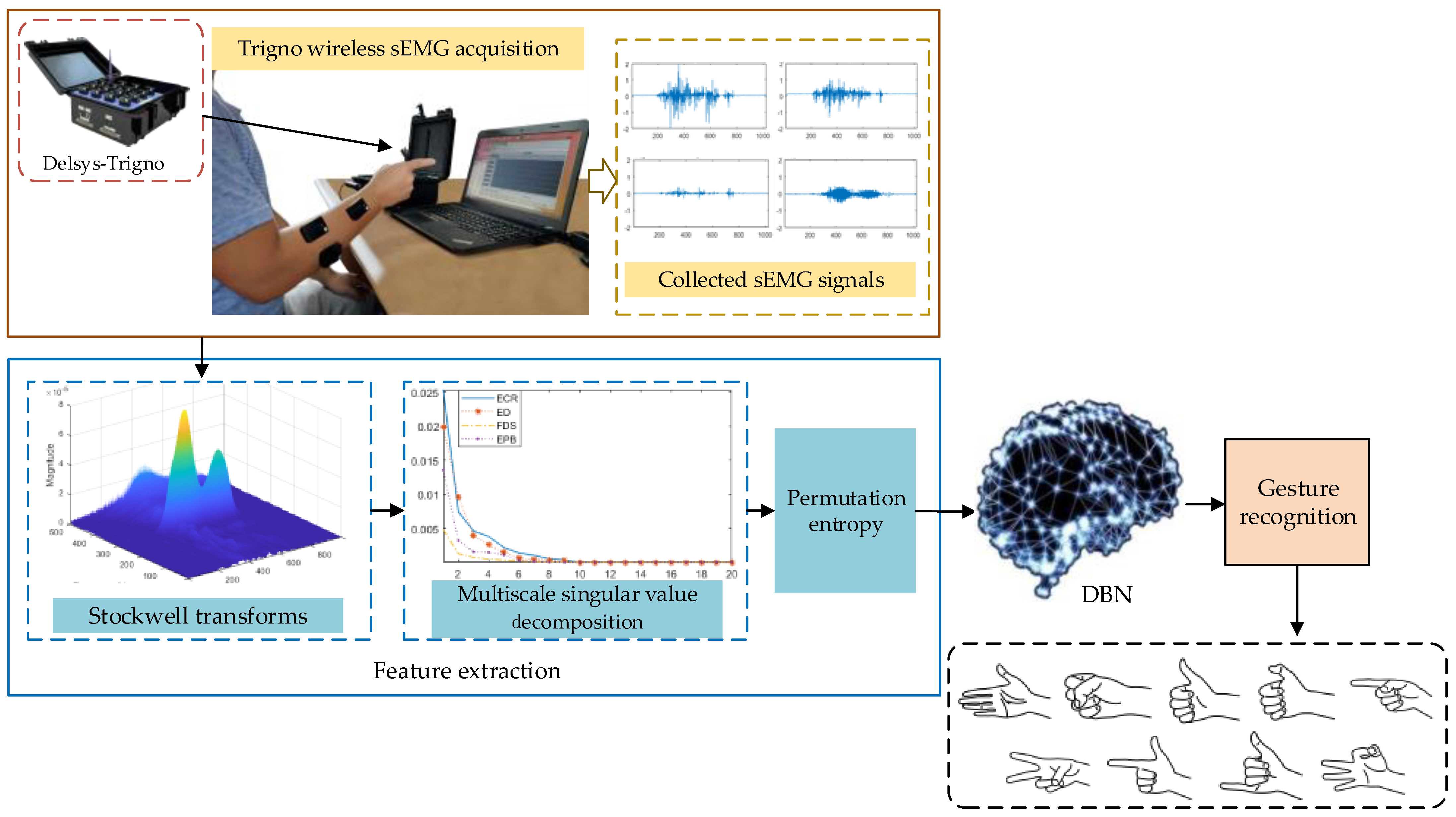
2. Materials and Methods
2.1. Muscle Selection
2.2. Gesture Category
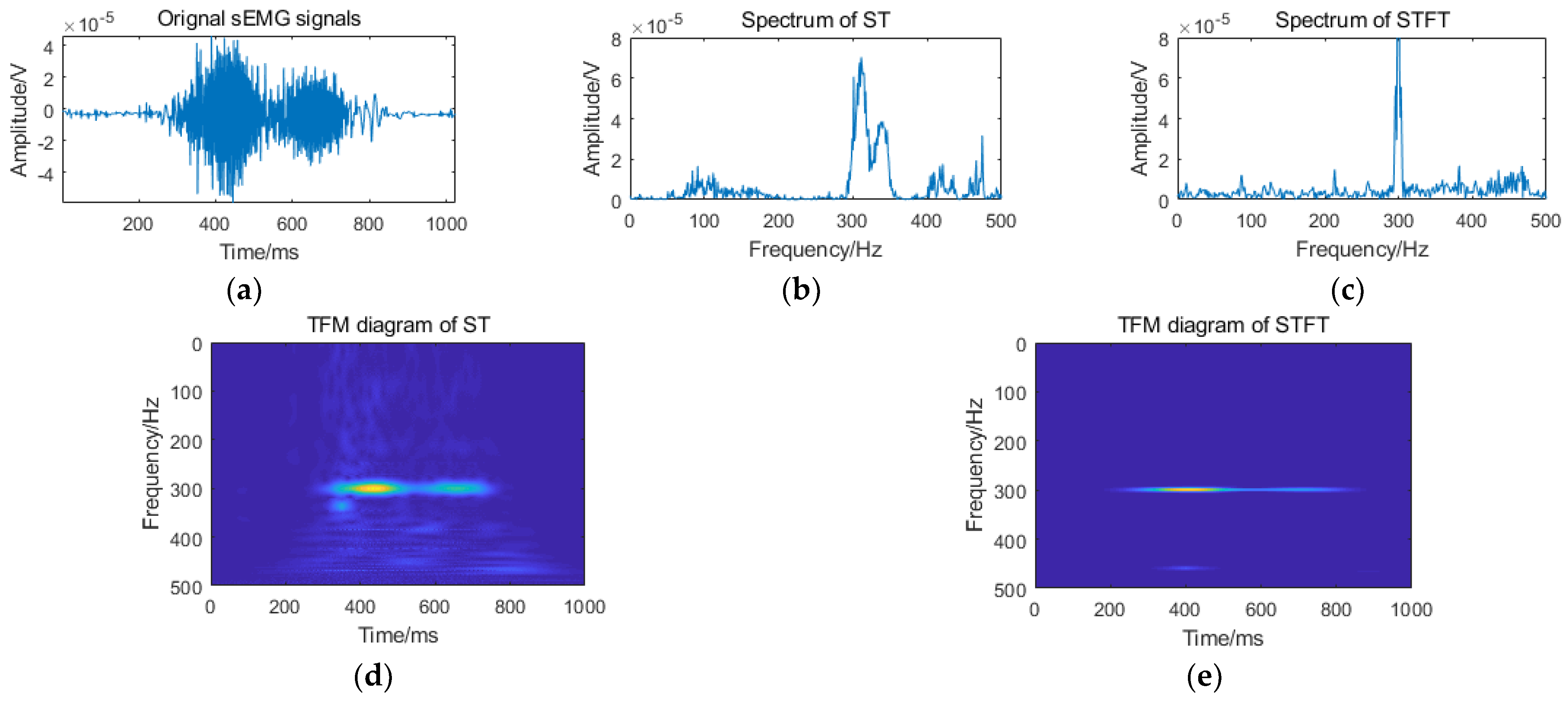
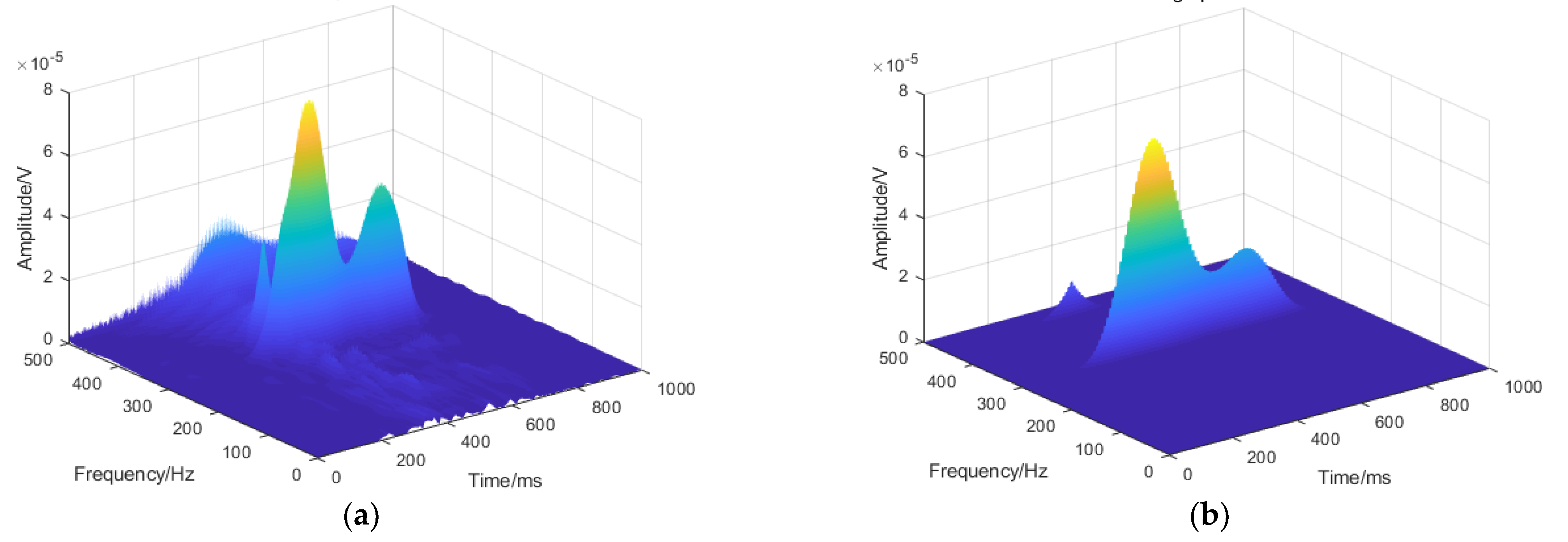
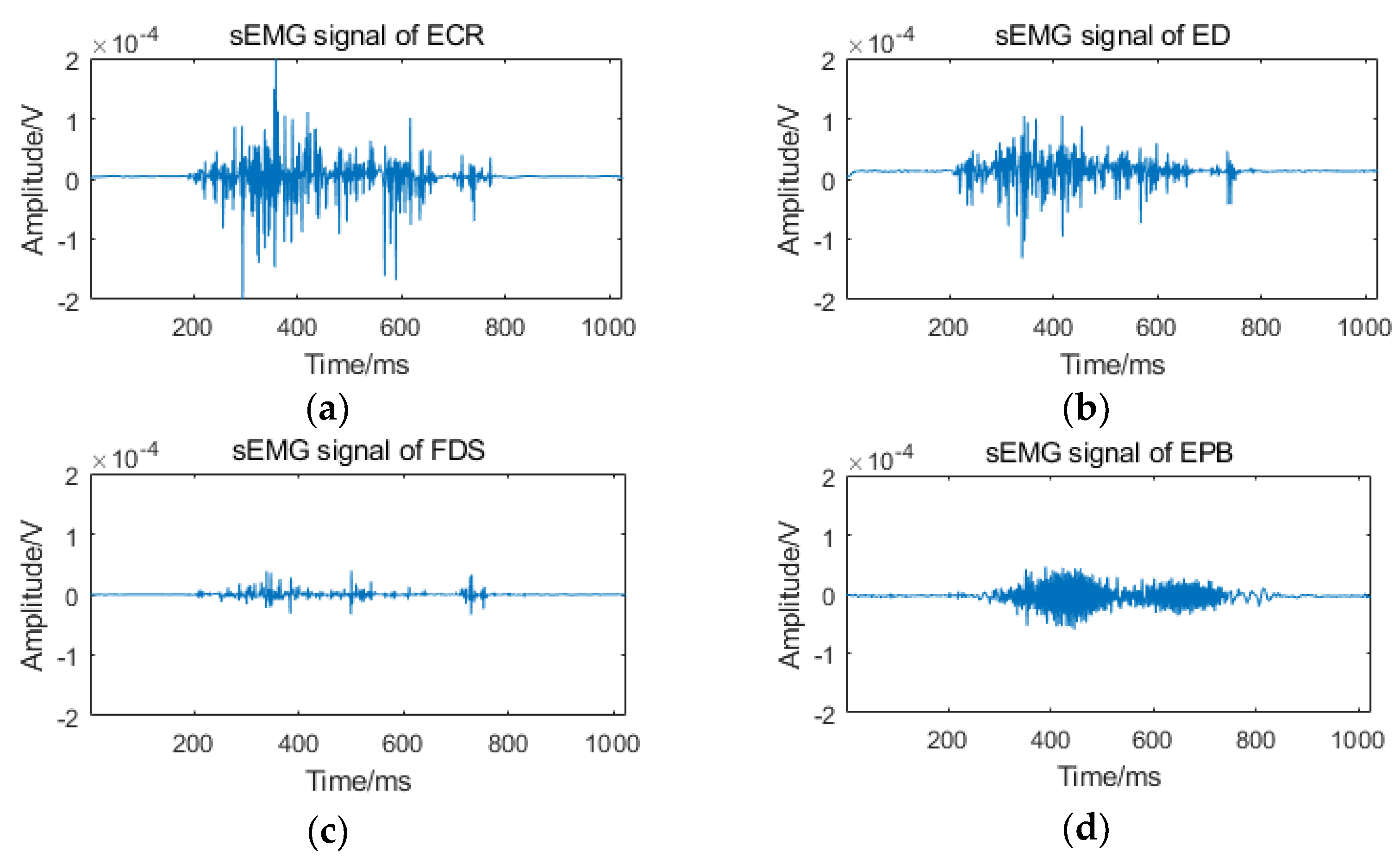
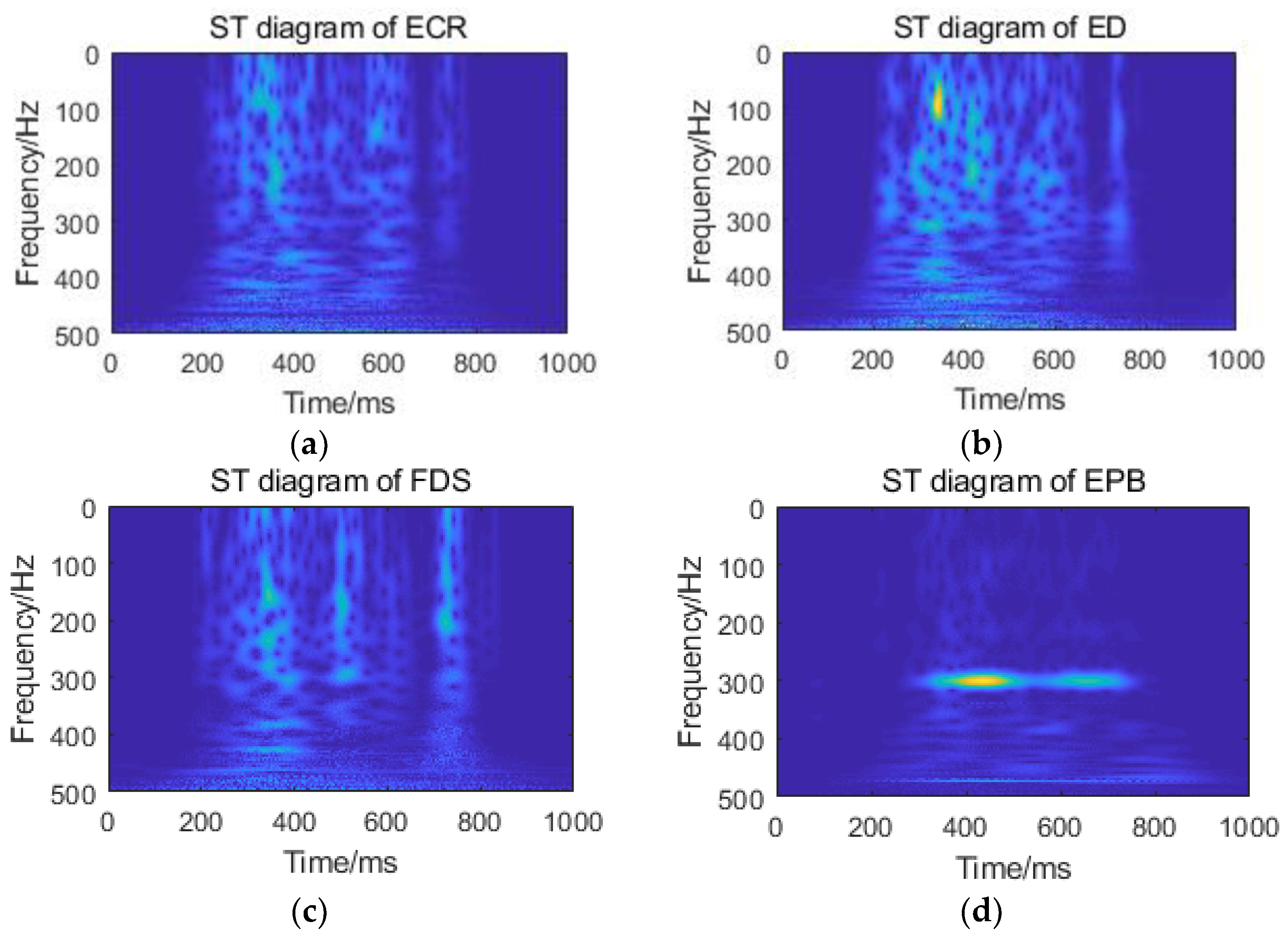
2.3. ST of sEMG Signal
2.4. Multiscale Singular Value PE
- (1)
- The TFM A is obtained by ST of the sEMG signal.
- (2)
- Calculate the global singular value eigenvector of matrix A.
- (3)
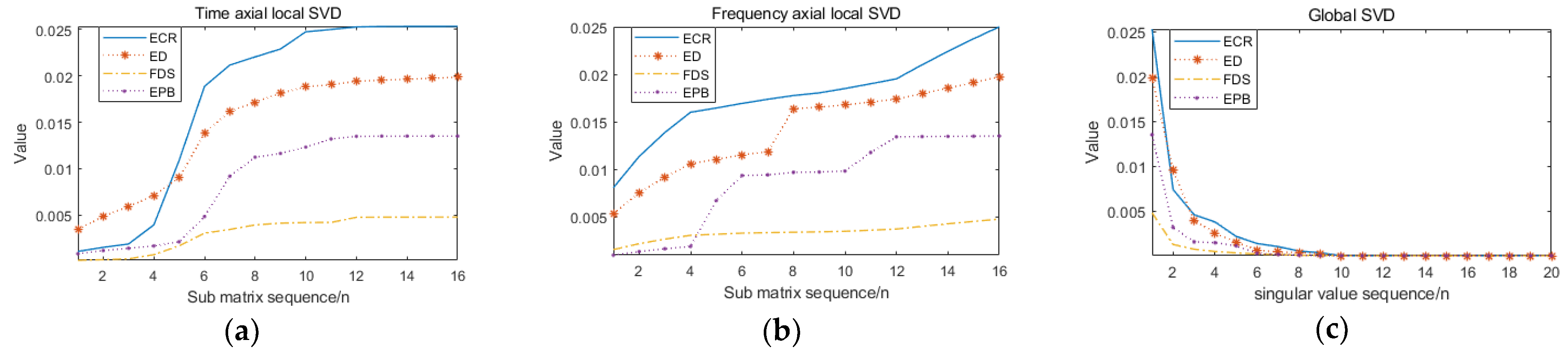
- A is divided into sub matrices along the time axis and sub matrices along the frequency axis. The division method is shown in Figure 6.
- (4)
- SVD is applied to the sub matrix to obtain the corresponding singular value sequence.
- (5)
- Since the singular value sequence of each sub matrix decays rapidly in numerical value, the largest singular value of each sub matrix is selected to construct eigenvectors, that is and .
- (6)
- PE is performed on multiscale singular values. As a nonlinear dynamic method based on complexity measurement, PE has been gradually applied to the analysis of complex bioelectrical signals [32]. PE is mainly used to analyze the changes of nonlinear time series, and its basic principles are defined as follows:
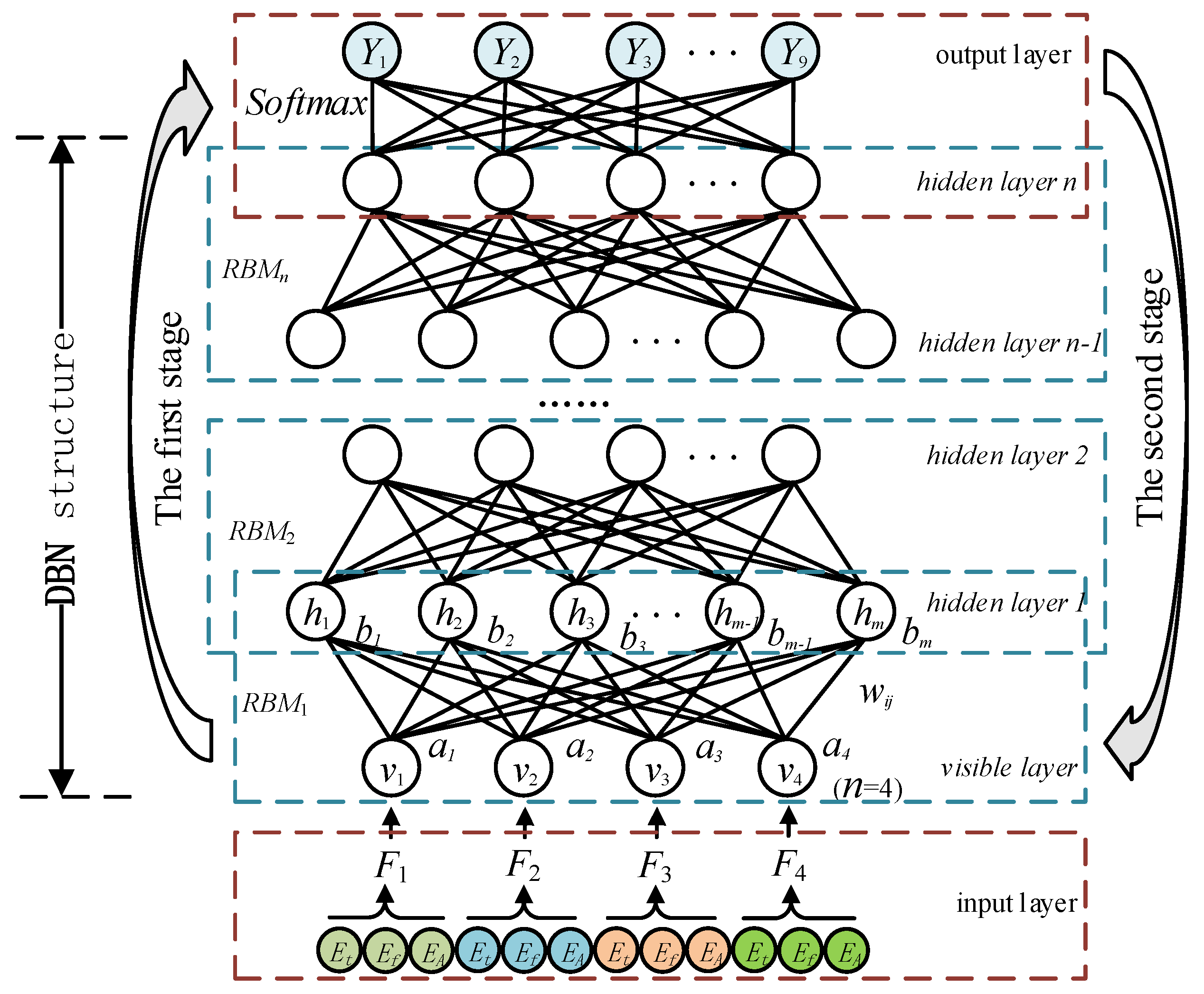
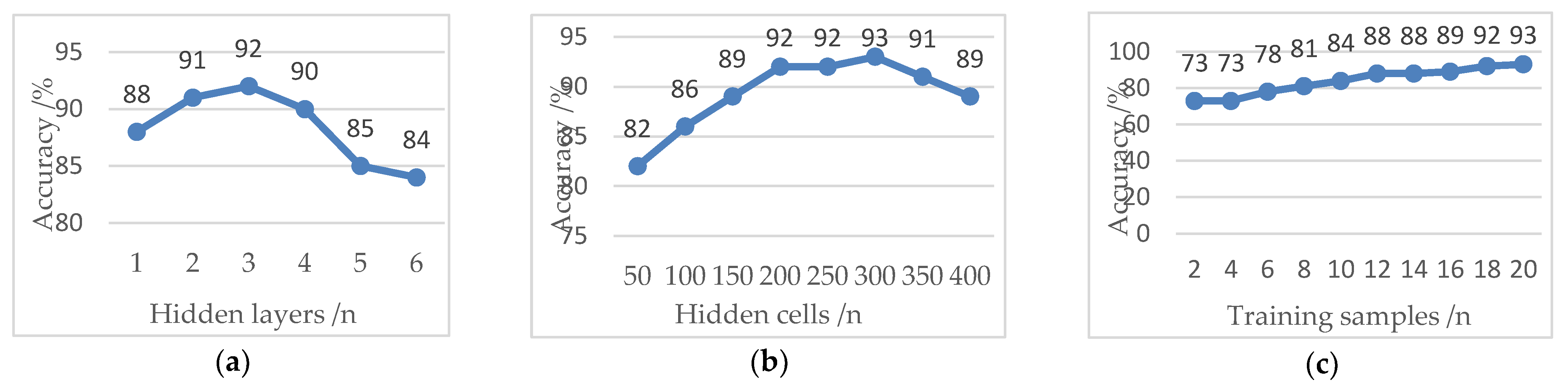
2.5. Gesture Classification
3. Results and Discussion
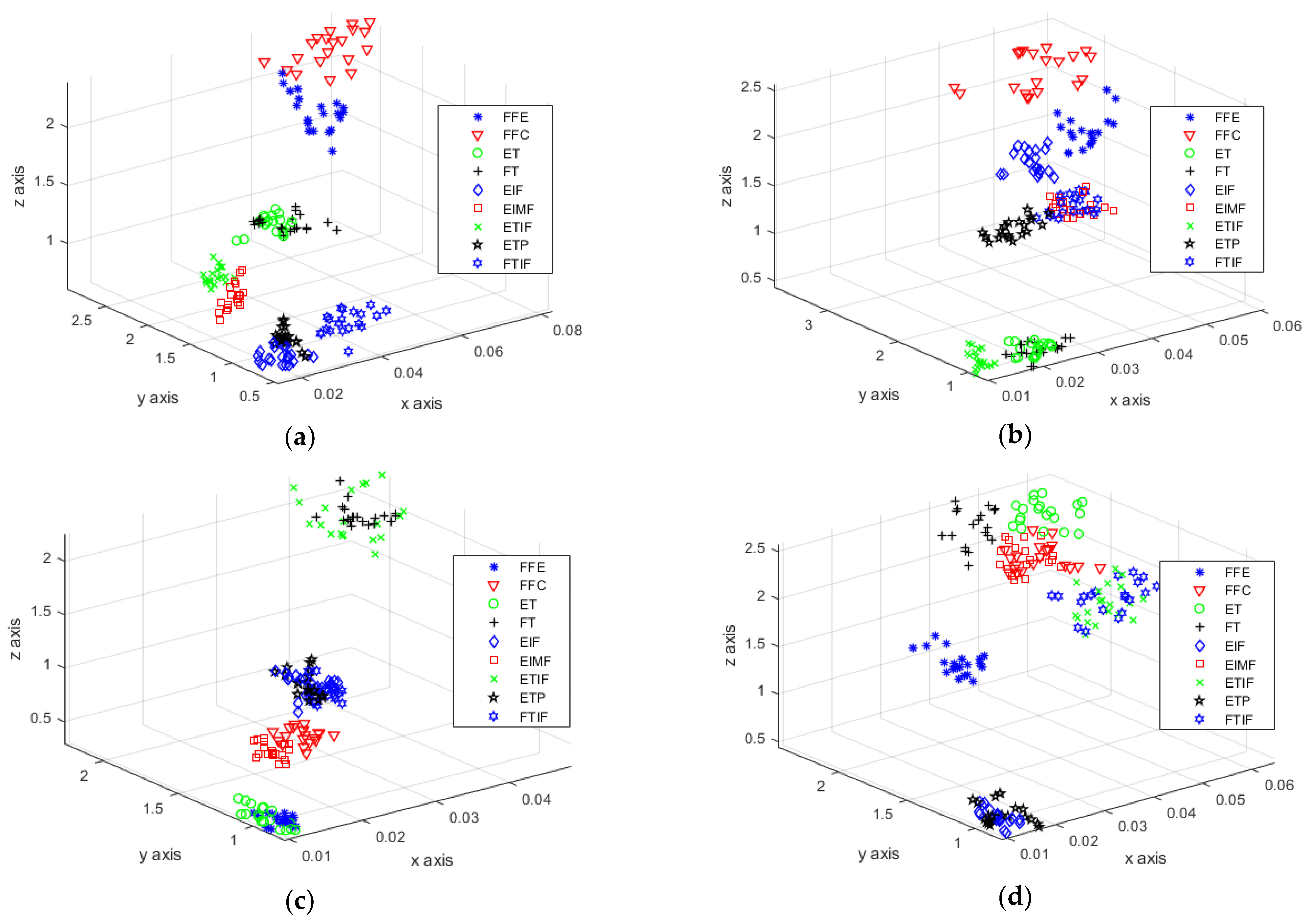
3.1. Feature Extraction Experiment
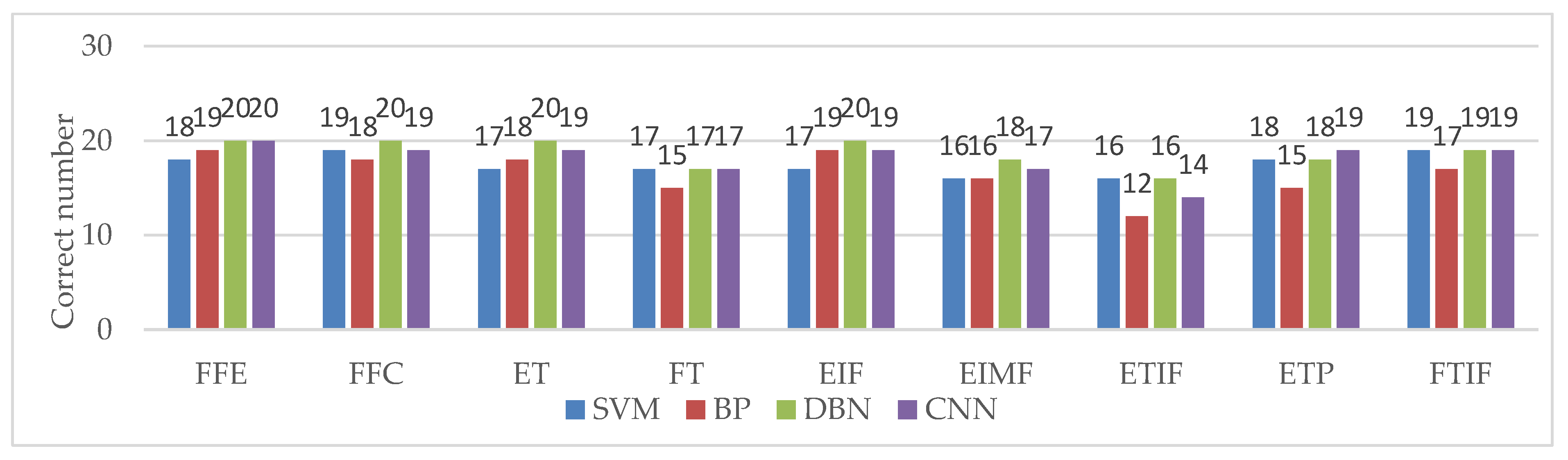
3.2. Classification Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, L.; Fu, J.; Wu, Y.; Li, H.; Zheng, B. Hand Gesture Recognition Using Compact CNN via Surface Electromyography Signals. Sensors 2020, 20, 672. [Google Scholar] [CrossRef]
- Asif, A.R.; Waris, A.; Gilani, S.O.; Jamil, M.; Ashraf, H.; Shafique, M.; Niazi, I.K. Performance Evaluation of Convolutional Neural Network for Hand Gesture Recognition Using EMG. Sensors 2020, 20, 1642. [Google Scholar] [CrossRef]
- Scheme, E.; Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J. Rehabil. Res. Dev. 2011, 48, 643–659. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, L.; Xi, X.; Miran, S.M.; Xue, A. Estimation and Correlation Analysis of Lower Limb Joint Angles Based on Surface Electromyography. Electronics 2020, 9, 556. [Google Scholar] [CrossRef]
- Xi, X.; Jiang, W.; Lü, Z.; Miran, S.M.; Luo, Z.Z. Weighted Kernel FDA Fall Recognition of EMG Fuzzy Entropy. Acta Electron. Sin. 2016, 44, 1376–1382. [Google Scholar]
- Arozi, M.; Caesarendra, W.; Ariyanto, M.; Munadi, M.; Setiawan, J.D.; Glowacz, A. Pattern Recognition of Single-Channel sEMG Signal Using PCA and ANN Method to Classify Nine Hand Movements. Symmetry 2020, 12, 541. [Google Scholar] [CrossRef]
- Bao, L.; Luo, Z.; Xi, X.; Li, W. Gesture Recognition Based on the Fusion of Surface Electromyography and Acceleration. Chin. J. Sens. Actuators 2019, 32, 1843–1863. [Google Scholar]
- China Association for the Deaf. Chinese Sign Language; Huaxia Press: Beijing, China, 2003. [Google Scholar]
- Yang, X.; Chen, X.; Cao, X.; Wei, S.; Zhang, X. Chinese Sign Language Recognition Based on an Optimized Tree-Structure Framework. IEEE J. Biomed. Health Inform. 2017, 21, 994–1004. [Google Scholar] [CrossRef]
- Zhuang, Y. Towards Chinese Sign Language Recognition Using Surface Electromyography and Accelerometers. In Proceedings of the 24th International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 21–23 November 2017. [Google Scholar]
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A Framework for Hand Gesture Recognition Based on Accelerometer and EMG Sensors. IEEE Trans. Syst. ManCybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Han, X.; Xing, S.; Liu, H.; Zhu, P.; Hu, C.; Wo, S. Recognition of prosthesis emg signals based on emg frequency characteristics. J. Test Meas. Technol. 2011, 25, 346–350. [Google Scholar]
- Yu, Y.; Sun, L.; Zhang, F.; Zhang, J. sEMG Pattern Recognition Based on Multi Feature Fusion of Wavelet Transform. Chin. J. Sens. Actuators 2016, 29, 512–518. [Google Scholar]
- Luo, Z.; Li, W. Removal of Pulse Artifacts from Surface EMG Signals. Chin. J. Sens. Actuators 2008, 27, 1498–1502. [Google Scholar]
- Xu, Q.-S.; Li, S.-M.; Li, Q.; Bu, Y.; Jiang, L. Prediction of Human Knee Joint Moment Based on Wigner-Ville Distribution of sEMG Signals. J. Beijing Sport Univ. 2016, 39, 57–61. [Google Scholar]
- Li, M.; Cui, Y.; Yang, J.; Hao, D.-M. An Adaptive Multi-Domain Fusion Feature Extraction with Method HHT and CSSD. Acta Electron. Sin. 2013, 41, 2479–2486. [Google Scholar]
- Zhou, J.; Li, X.; Mitri, H.S. Identification of power quality hybrid disturbances based on S&TT transform and PSO-SVMs. Electr. Meas. Instrum. 2020, 4, 83–91. [Google Scholar]
- Luo, F.; Liu, P.; Luo, Y.; Zhu, S. EEG Feature Extraction Method of Multi-feature Fusion for Motor Imagery. J. Comput. Appl. 2019, 2, 312–316. [Google Scholar]
- Ni, Y.; Xu, K.; Wang, W. Coherency identification method using S-transform and local singular value decomposition. Electr. Meas. Instrum. 2018, 55, 45–51. [Google Scholar]
- Du, L.; Dai, B.; Lu, G.; Sun, C.; Wang, Y. Overvoltage Features Extraction Based on S Transform and Local Singular Value Decomposition. Trans. China Electrotech. Soc. 2010, 25, 147–153. [Google Scholar]
- Tian, Y.; Tang, T.; Wang, Y.H.; Fang, Y. Do singular value contain adequate information for face recognition. Pattern Recognit. 2003, 36, 649–655. [Google Scholar] [CrossRef]
- Cao, Y.; Tung, W.W.; Gao, J.B.; Protopopescu, V.A.; Hively, L.M. Detecting dynamical changes in time series using the permutation entropy. Phys. Rev. E 2004, 70, 46217. [Google Scholar] [CrossRef]
- Hinton, G. A practical guide to training restricted Boltzmann machines. Momentum 2012, 9, 599–619. [Google Scholar]
- Hinton, G.; Osindero, S.; Teh, Y. A fast learning algorithm for deep belief nets. Neural Comput. 2014, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Hinton, G. Deep belief networks. Scholarpedia 2009, 4, 5947. [Google Scholar] [CrossRef]
- Yan, Y.; Yin, X.C.; Li, S.J.; Yang, M.Y.; Hao, H.W. Learning document semantic representation with hybrid deep belief network. Comput. Intell. Neurosci. 2015, 2015, 650527. [Google Scholar] [CrossRef]
- Liu, Y.; Bu, Y.; He, P.; Tian, Y. Transformer Winding Strain Detection Identification Based on S-transform and ELM. High Volt. Appar. 2020, 56, 9–17. [Google Scholar]
- Huang, N.; Peng, H.; Cai, G.; Chen, J. Power Quality Disturbances Feature Selection and Recognition Using Optimal Multi-Resolution Fast S-Transform and CART Algorithm. Energies 2016, 9, 927. [Google Scholar] [CrossRef]
- Huang, N.; Chen, H.; Zhang, S.; Cai, G.; Li, W.; Xu, D.; Fang, L. Mechanical Fault Diagnosis of High Voltage Circuit Breakers Based on S-transform and Extreme Learning Machine. High Volt. Appar. 2018, 54, 74–80. [Google Scholar]
- Alqam, S.J.; Zaro, F.R. Power Quality Detection and Classification Using S-Transform and Rule-Based Decision Tree. Int. J. Electr. Electron. Eng. Telecommun. 2019, 8, 45–50. [Google Scholar] [CrossRef]
- Tavakoli, M.; Benussi, C.; Lourenco, J.L. Single channel surface EMG control of advanced prosthetic hands: A simple, low cost and efficient approach. Expert Syst. Appl. 2017, 79, 322–332. [Google Scholar] [CrossRef]
- Ping, X.; Xiuli, W.; Yihao, D. Feature Extraction Method of sEMG Based on Auto Permutation Entropy. PR AI 2014, 27, 496–501. [Google Scholar]
- Huang, J.; Wang, X.; Wang, D.; Wang, Z.; Hua, X. Analysis of Weak Fault in Hydraulic System Based on Multi-scale Permutation Entropy of Fault-Sensitive Intrinsic Mode Function and Deep Belief Network. Entropy 2019, 21, 425. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Zhang, X.; Ye, P.; Du, M. Deep Belief Networks Based Toponym Recognition for Chinese Text. Isprs Int. J. Geo-Inf. 2018, 7, 217. [Google Scholar] [CrossRef]
- Chen, X.; Sun, Y.; Miao, P.; Bu, Q. Deep Belief Network Face Recognition Algorithm Based on Multi-level Texture Features. Comput. Appl. Softw. 2020, 37, 156–163. [Google Scholar]
- Huang, G.; Li, Z.; Xu, Y.; Qian, Y.; Sheng, G.; Jiang, X. Partial Discharge Pattern Recognition of XLPE DC Cable Based on Improved Deep Belief Networks. High Volt. Eng. 2020, 46, 327–334. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Papers | Number of Channels | Types of Signal | Method | Accuracy |
|---|---|---|---|---|---|
| 1 | Reference [9] | 4 | sEMG, accelerometer, gyroscope | Optimized tree-structure classification | 87.02% |
| 2 | Reference [10] | 5 | sEMG, accelerometer | Linear discriminant analysis | 91.4% |
| 3 | Reference [11] | 5 | sEMG, accelerometer | Multi-stream hidden Markov models | 90.2% |
| 4 | This paper | 4 | sEMG | Combination of multiscale singular value PE and DBN | 93.33% |
| No. | Name of Gesture Category | Abbreviation | Chinese SL Words 1 | Example |
|---|---|---|---|---|
| 1 | Five fingers extended | FFE | Dajia 2; Xianzai 3; Kaixin 4 | Figure 3a |
| 2 | Five fingers closed | FFC | Gongzuo 5; Jiayou 6 | Figure 3b |
| 3 | Extend thumb | ET | Hao 7; Youyi 8 | Figure 3c |
| 4 | Flexion of thumb | FT | Xiexie 9 | Figure 3d |
| 5 | Extend index finger | EIF | Ni 10; Yi 11; Shuohua 12 | Figure 3e |
| 6 | Extend index and middle finger | EIMF | Chang 13; Er 14 | Figure 3f |
| 7 | Extend thumb and index finger | ETIF | Lv 15; Ba 16; Gong 17 | Figure 3g |
| 8 | Extend thumb and pinkie | ETP | Dianhua 18; Qu 19; Liu 20 | Figure 3h |
| 9 | Flexion of thumb and index finger | FTIF | Gui 21; Lianxi 22; San 23 | Figure 3i |
| Number | Feature Extraction | Classifier | Accuracy | Time Cost |
|---|---|---|---|---|
| 1 | Multiscale singular value PE | SVM | 87.22% (157/180) | 1.24 s |
| 2 | Multiscale singular value PE | BP | 82.77% (149/180) | 1.82 s |
| 3 | Multiscale singular value PE | DBN | 93.33% (168/180) | 2.17 s |
| 4 | Multiscale singular value PE | CNN | 90.55% (163/180) | 3.49 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Luo, Z.; Jin, Y.; Xi, X. Gesture Recognition Based on Multiscale Singular Value Entropy and Deep Belief Network. Sensors 2021, 21, 119. https://doi.org/10.3390/s21010119
Li W, Luo Z, Jin Y, Xi X. Gesture Recognition Based on Multiscale Singular Value Entropy and Deep Belief Network. Sensors. 2021; 21(1):119. https://doi.org/10.3390/s21010119
Chicago/Turabian StyleLi, Wenguo, Zhizeng Luo, Yan Jin, and Xugang Xi. 2021. "Gesture Recognition Based on Multiscale Singular Value Entropy and Deep Belief Network" Sensors 21, no. 1: 119. https://doi.org/10.3390/s21010119
APA StyleLi, W., Luo, Z., Jin, Y., & Xi, X. (2021). Gesture Recognition Based on Multiscale Singular Value Entropy and Deep Belief Network. Sensors, 21(1), 119. https://doi.org/10.3390/s21010119