Obtaining World Coordinate Information of UAV in GNSS Denied Environments

 ,
,
Abstract
1. Introduction
2. The PBVS Model
2.1. Problem Description
- The geographic location information of the operation target is known.
- The target posture of each UAV operation remains unchanged.
- The UAV with the camera is always tracking the target during the operation.
- Ensuring that the target is not lost;
- Ensuring the clarity of the target shooting.
2.2. Model Establishment
- In the autonomous flight of the UAV, it is necessary to confirm a specific target in advance. Therefore, it is assumed that the target can be identified by the UAV.
- During the autonomous flight of the UAV, the targets inspected by the UAV are fixed, and the location is known in advance. Therefore, it is assumed that the three-dimensional world coordinates of the target object are known.
- The UAV slowly approaches the target during the shooting process, so the angle of the UAV carrying the PTZ also changes slowly. When the computing power is sufficient, it is assumed that the camera carried by the UAV follows the anchor point in real-time, and the feature point of the anchor point always focuses on the camera’s optical axis.
- The world geographic coordinate system and magnetic geographic coordinate system do not coincide, but the deviation is not large. Therefore, we can assume that the geographic and magnetic geographic coordinate systems are the same.
- Although the Earth’s surface is spherical, the geographic coordinate projection of the UAV and the geographic coordinate projection of the anchor point are relatively close. It is assumed that the connection between the UAV projection and the anchor point projection is a straight line.
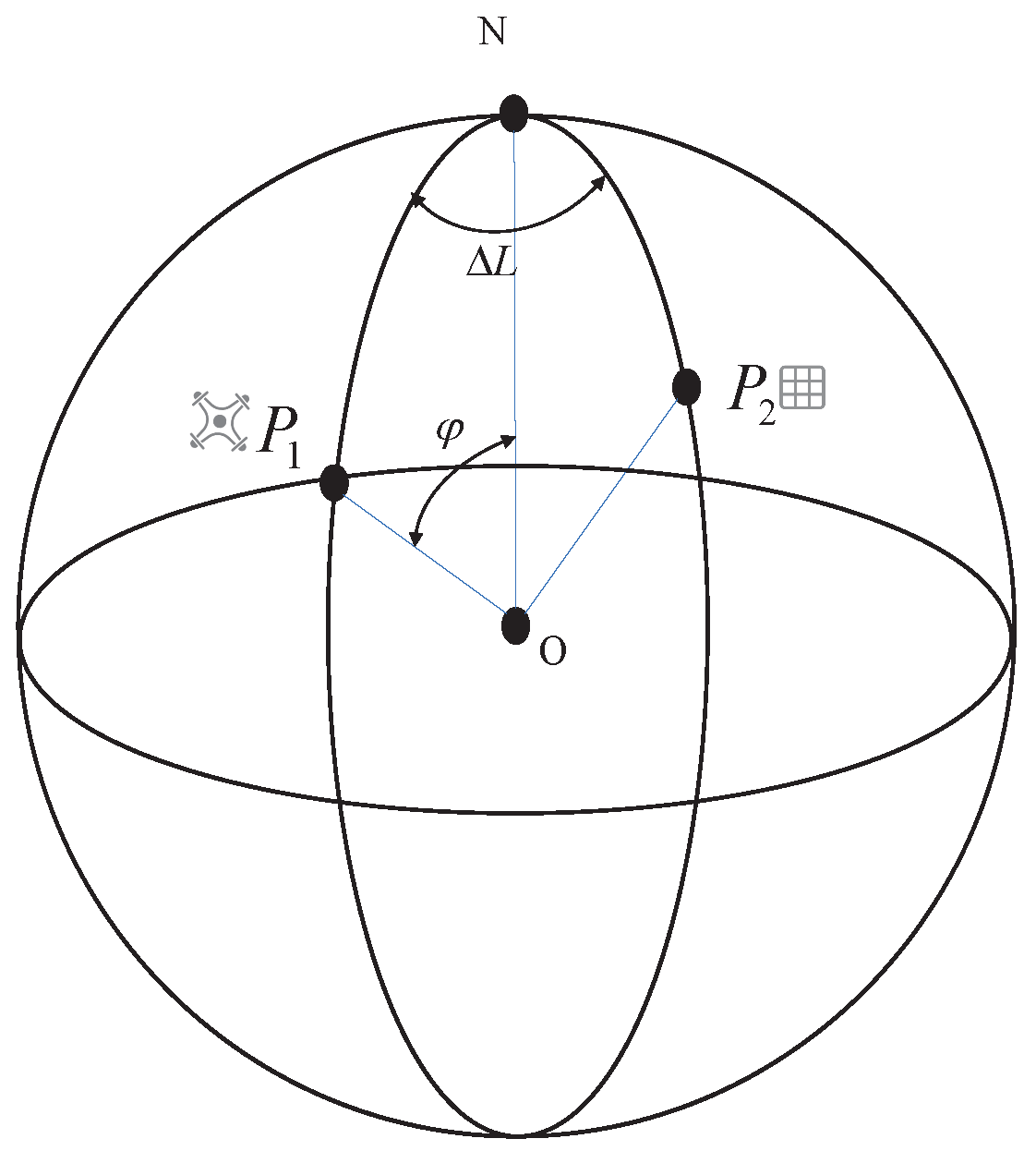
- Although the Earth is not a regular sphere, the geographic coordinate projections of the UAV and the anchor point are relatively close. Therefore, it is assumed that the Earth is spherical and that the distance from any point on the spherical surface to the center of the sphere is unchanged, and its value is R. Based on these assumptions, the PBVS system model was established.
2.2.1. Calculate Latitude and Longitude
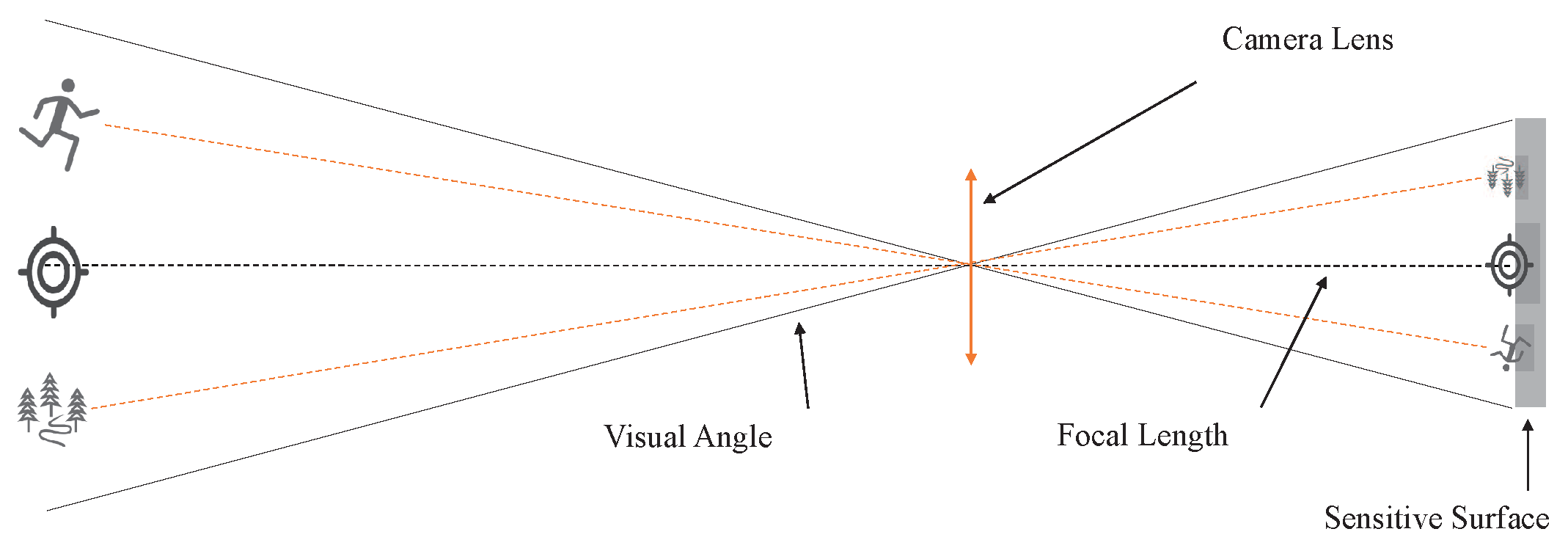
2.2.2. Establishment of the Camera Model
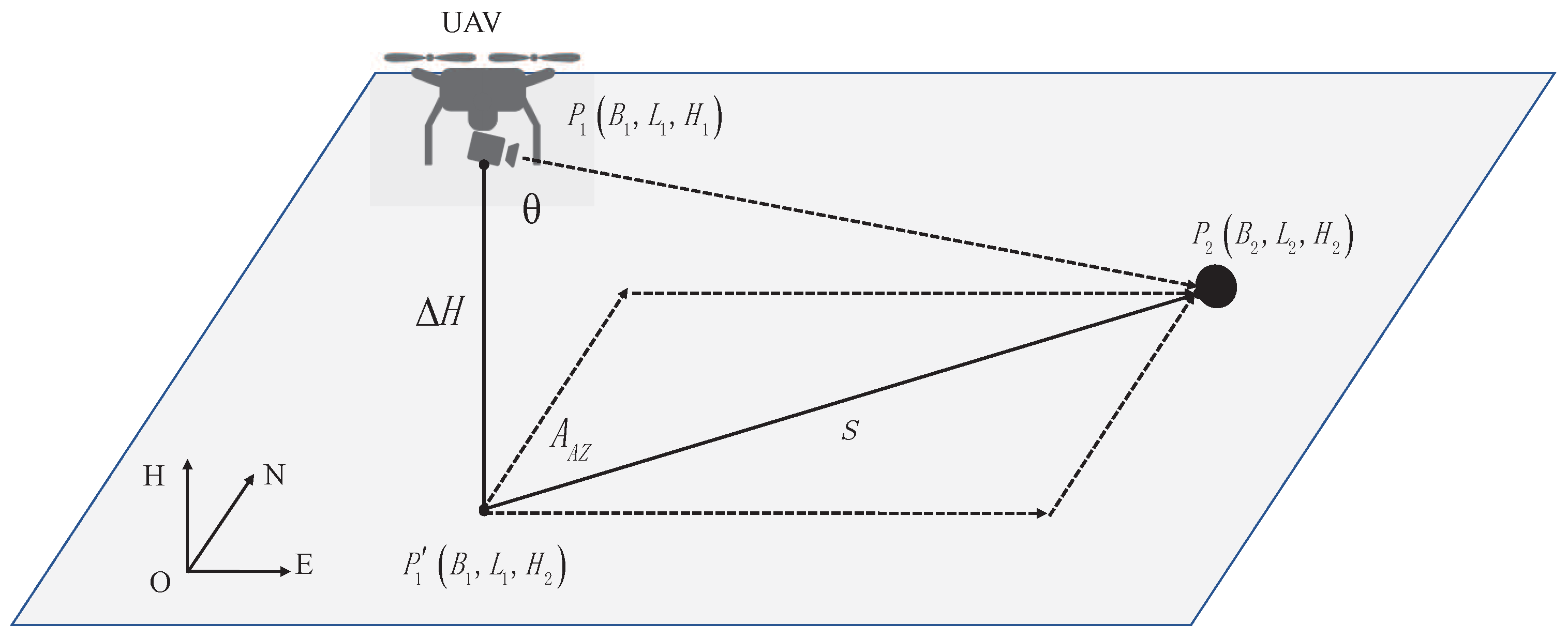
2.2.3. Description of Imaging in Camera Motion
3. Test Method
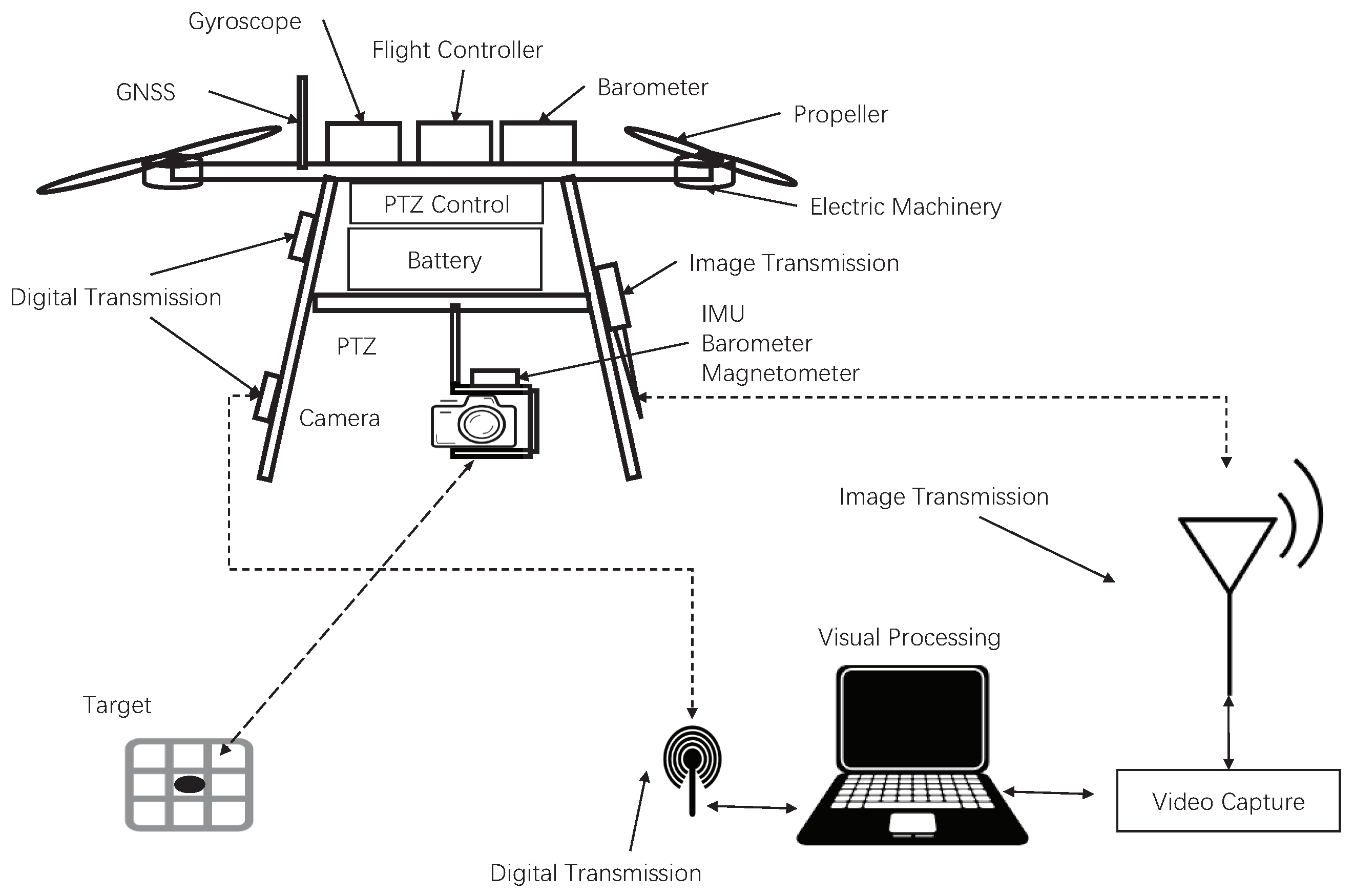
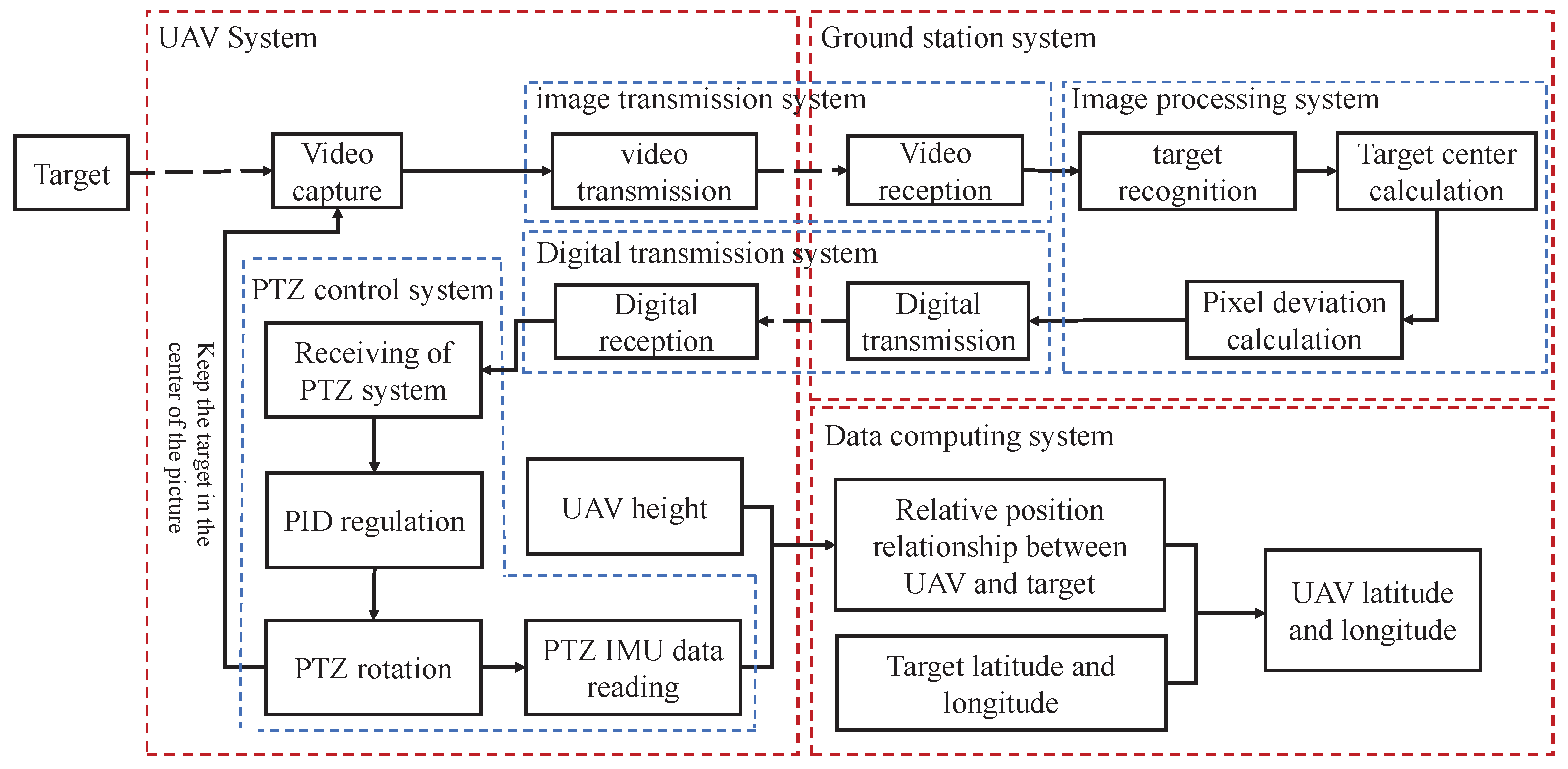
3.1. System Description
- Image processing and target recognition: The camera mounted on the PTZ performed environmental video collection and transmitted the collected video back to the ground server for processing to identify whether the job target appeared in the image. When the target appeared, a pixel coordinate system was established by the picture pixels, and the coordinate value of the feature point of the target center in the pixel field of view was calculated. It was compared with the pixel coordinate value of the camera center point. The deviation value of the pixel center position from the target feature point position could be output and transmitted to the UAV PTZ control system.
- PTZ control and target tracking: After receiving the deviation information between the pixel center position and the target feature point position, the UAV control system adjusted the angle of each axis of the three-axis PTZ with the input deviation value and moved the center of the camera’s field of view to the target feature point, that is to adjust the camera optical axis to the object. During the subsequent operations, the PTZ control system repeated this step in real-time to ensure that the target feature point was on the camera optical axis.
- Position coordinate resolving: When the UAV’s PTZ locked the target at the center field of view, the PTZ’s current attitude and altitude information could be read by the PTZ’s sensors. Further, the UAV’s current latitude and longitude position could be calculated by the physical model derived in Section 2. The position information was input into the UAV control unit and navigation could be completed.
3.2. Visual System
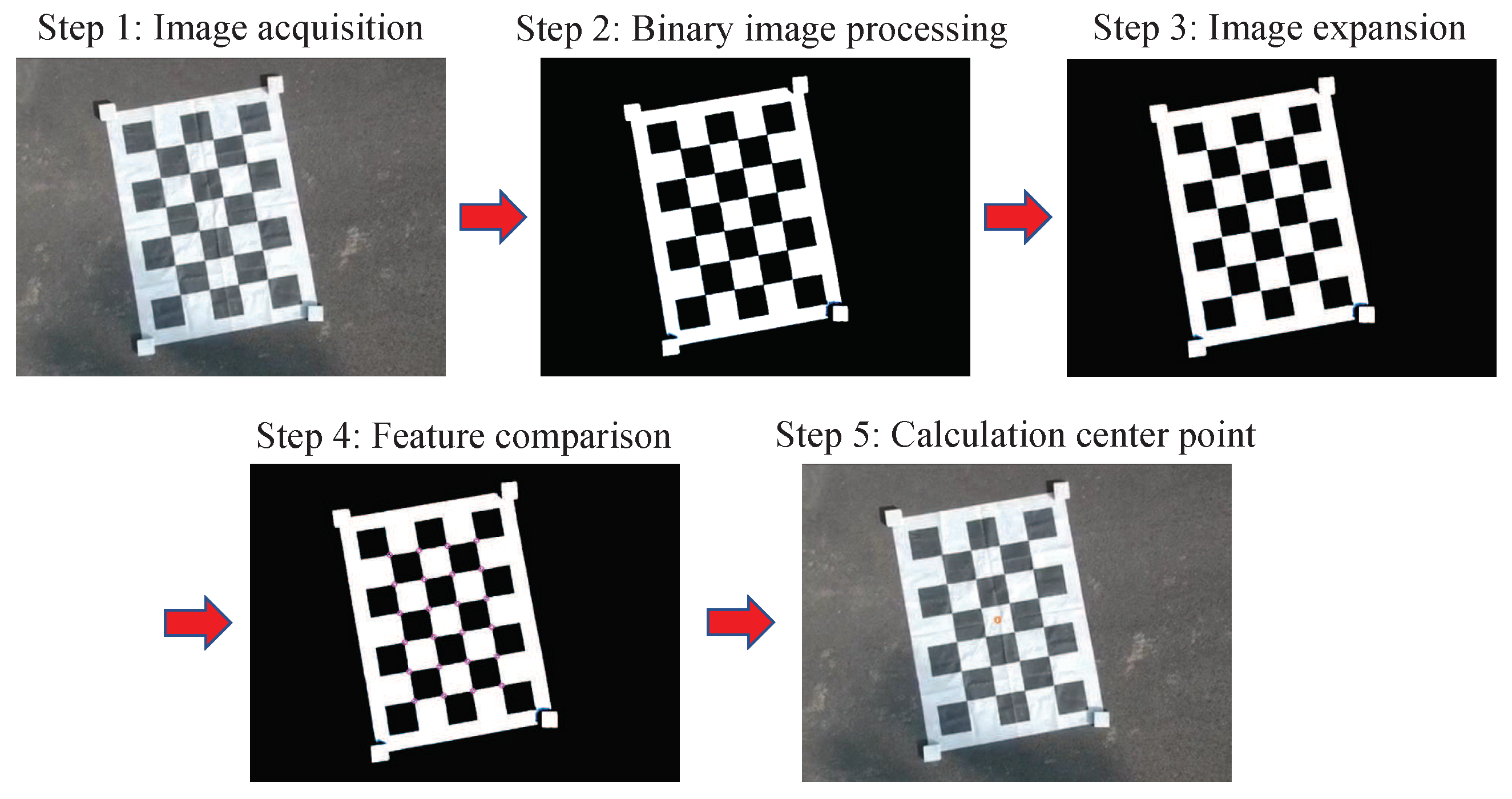
- Use the camera to collect marker images;
- Binarize the images collected by the camera. The local average adaptive thresholding method was used to binarize the image, and the judgment threshold was obtained after equalization;
- Dilate the image to separate the connections between the binarized black blocks, so as to obtain a clearer binarized image;
- Conduct contrast detection of the target image, find the target pattern features in the image, and use the constraint conditions such as feature pattern aspect ratio, perimeter, and area to remove noise interference in the image;
- Calculate the coordinates of the center position of the target.
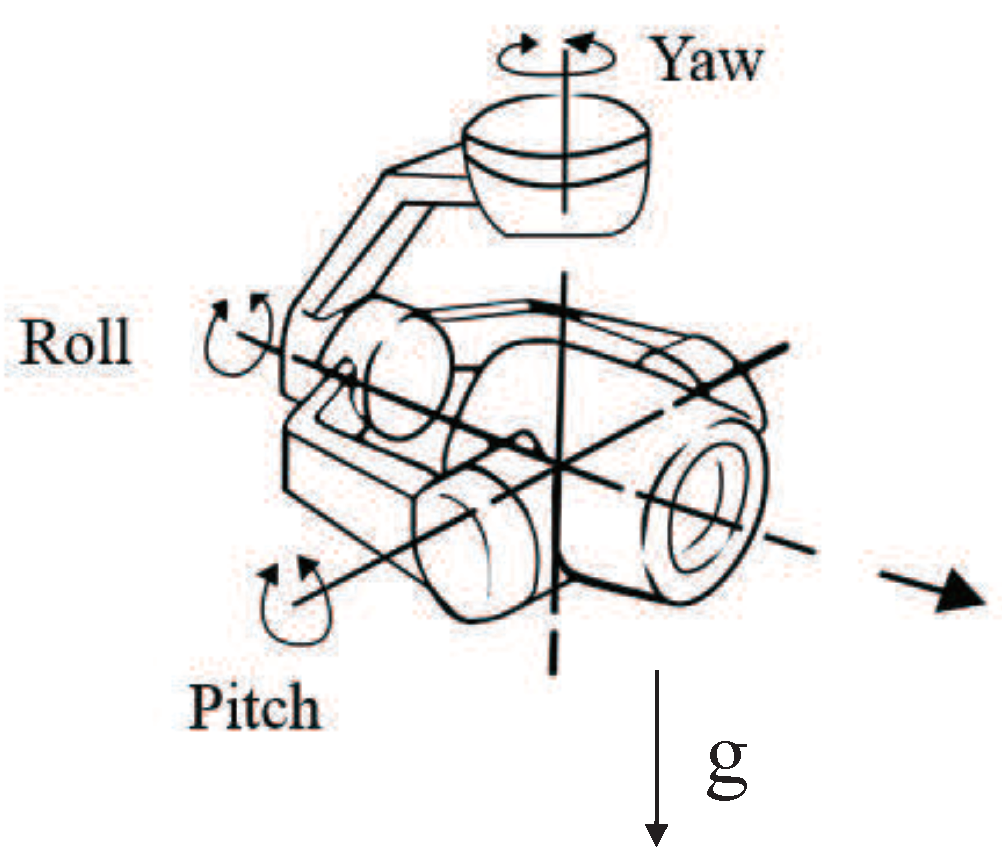
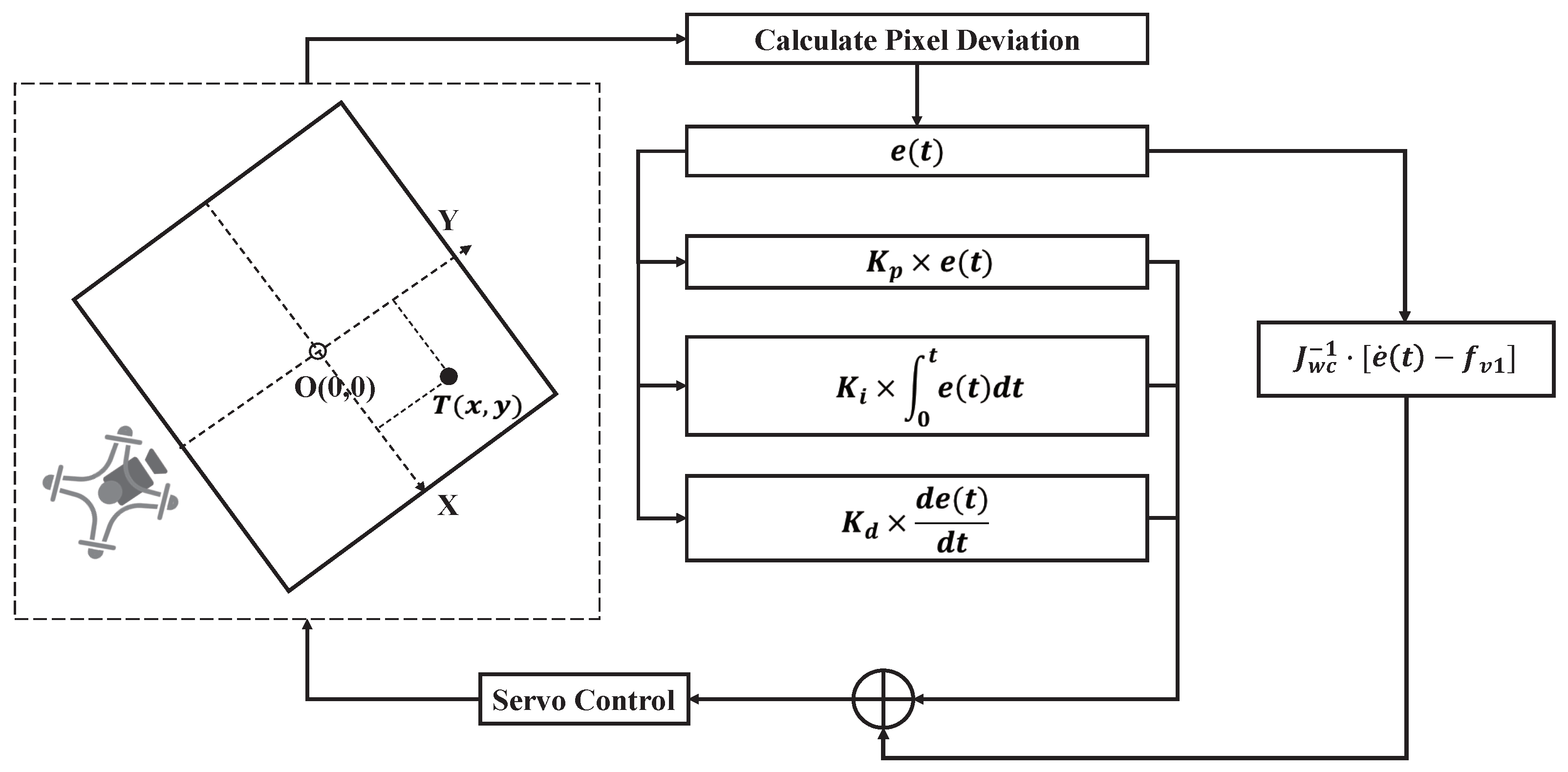
3.3. PTZ Control
- Stabilizing effect: The use of the PTZ could ensure that the vision acquisition system was not affected by the UAV’s under-drive control system. During fast and dynamic operation, the camera could overcome the jitter caused by the UAV flight, thus maintaining independence and enabling the vision system to work in a specific posture;
- Tracking: This significantly improved the visual servoing problem of the PBVS system, enabling the system to ensure that the camera could track the target object in real-time based on the feedback information provided by the vision system during the work process and keep the feature point of the target object always on the camera’s optical axis.
4. Simulation and Experiment
4.1. Simulation Experiment
4.1.1. Simulation Environment
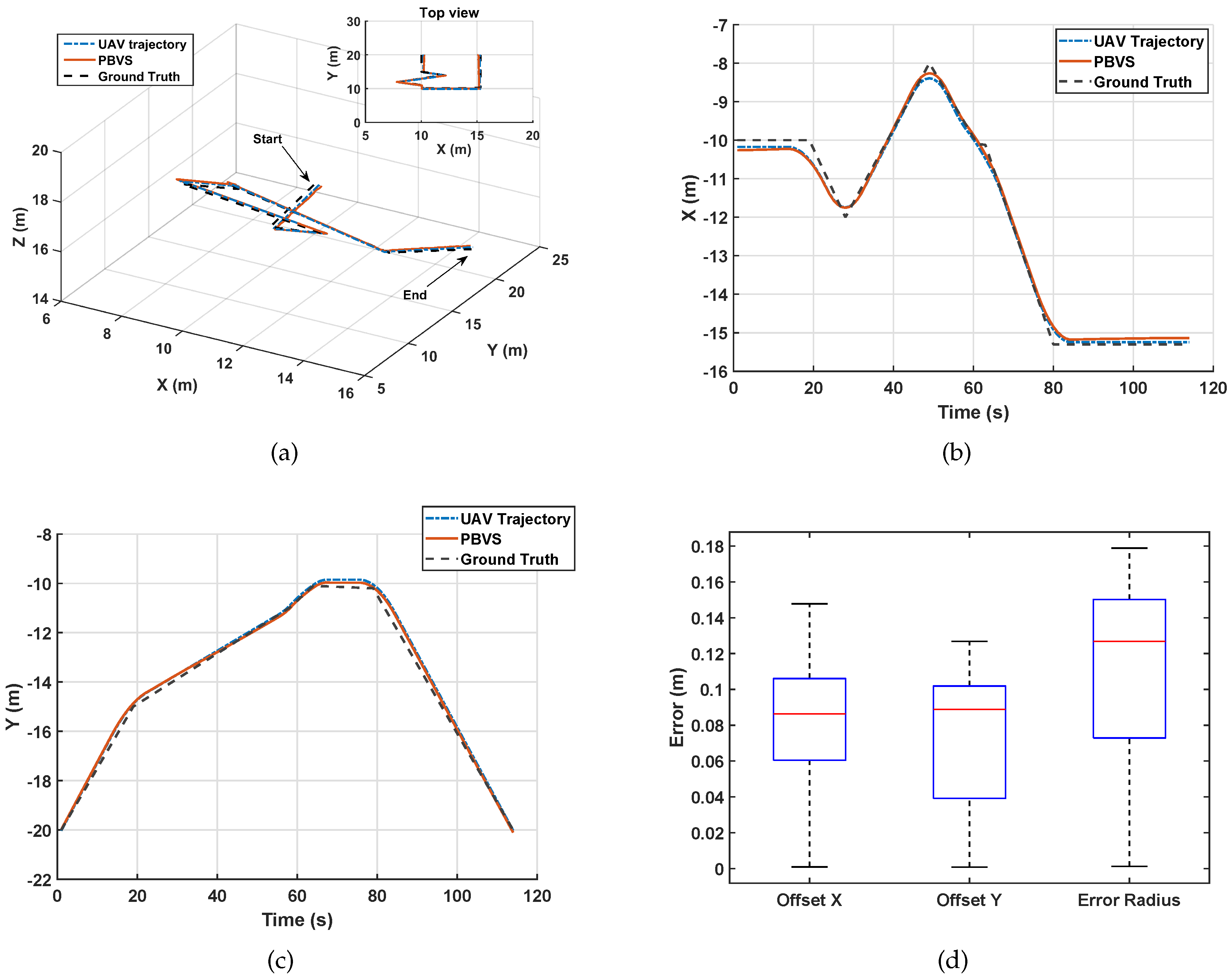
4.1.2. Simulation Results
4.2. Field Testing
4.2.1. Experimental Platform Construction
- Receive and process the data sent by the ground station.
- Read the camera and aircraft attitude data, RTK data, altitude data, etc., and return the current data to the ground station through the transmission module.
- Control the rotation angle of the PTZ.
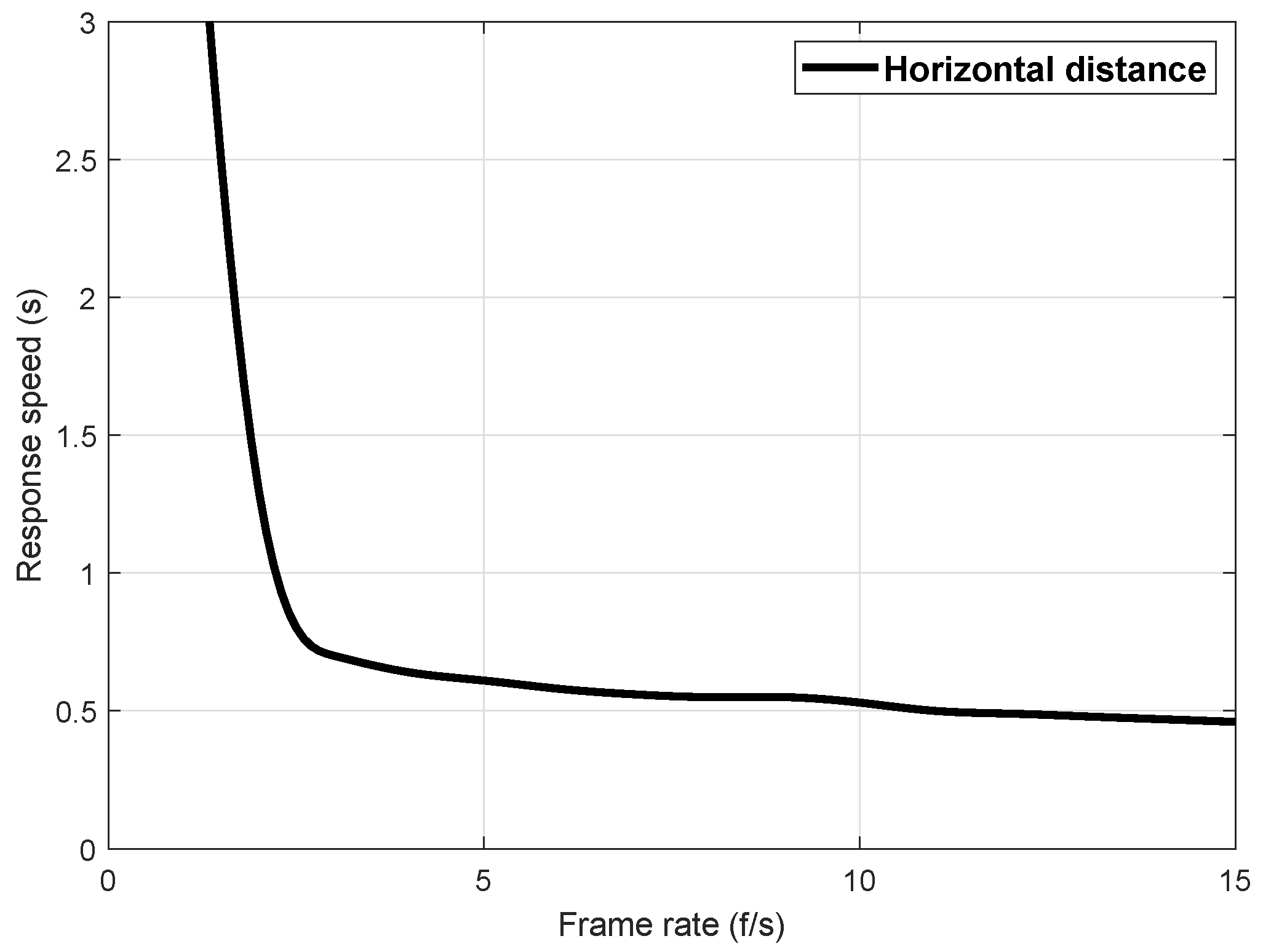
4.2.2. System Response Speed Test
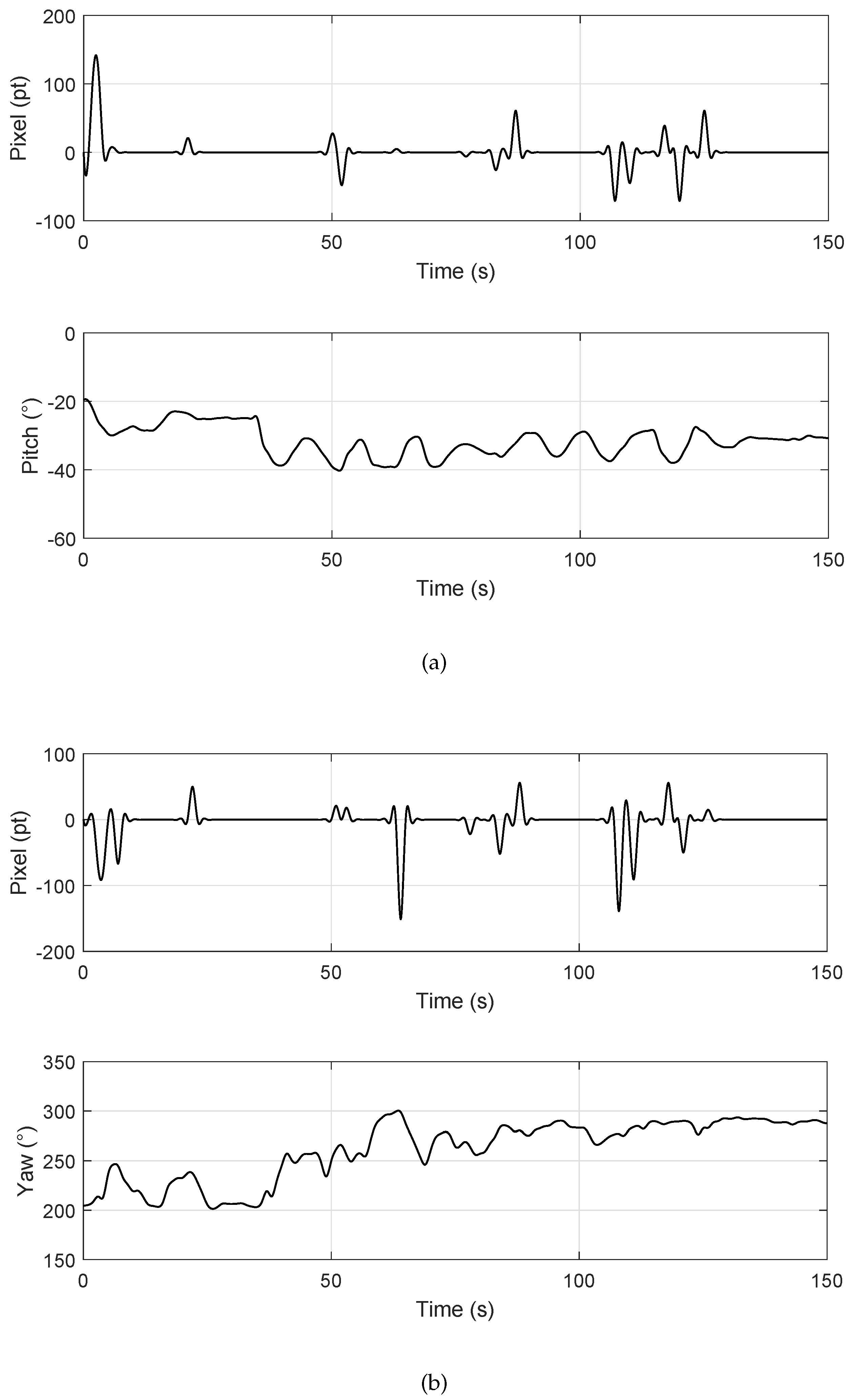
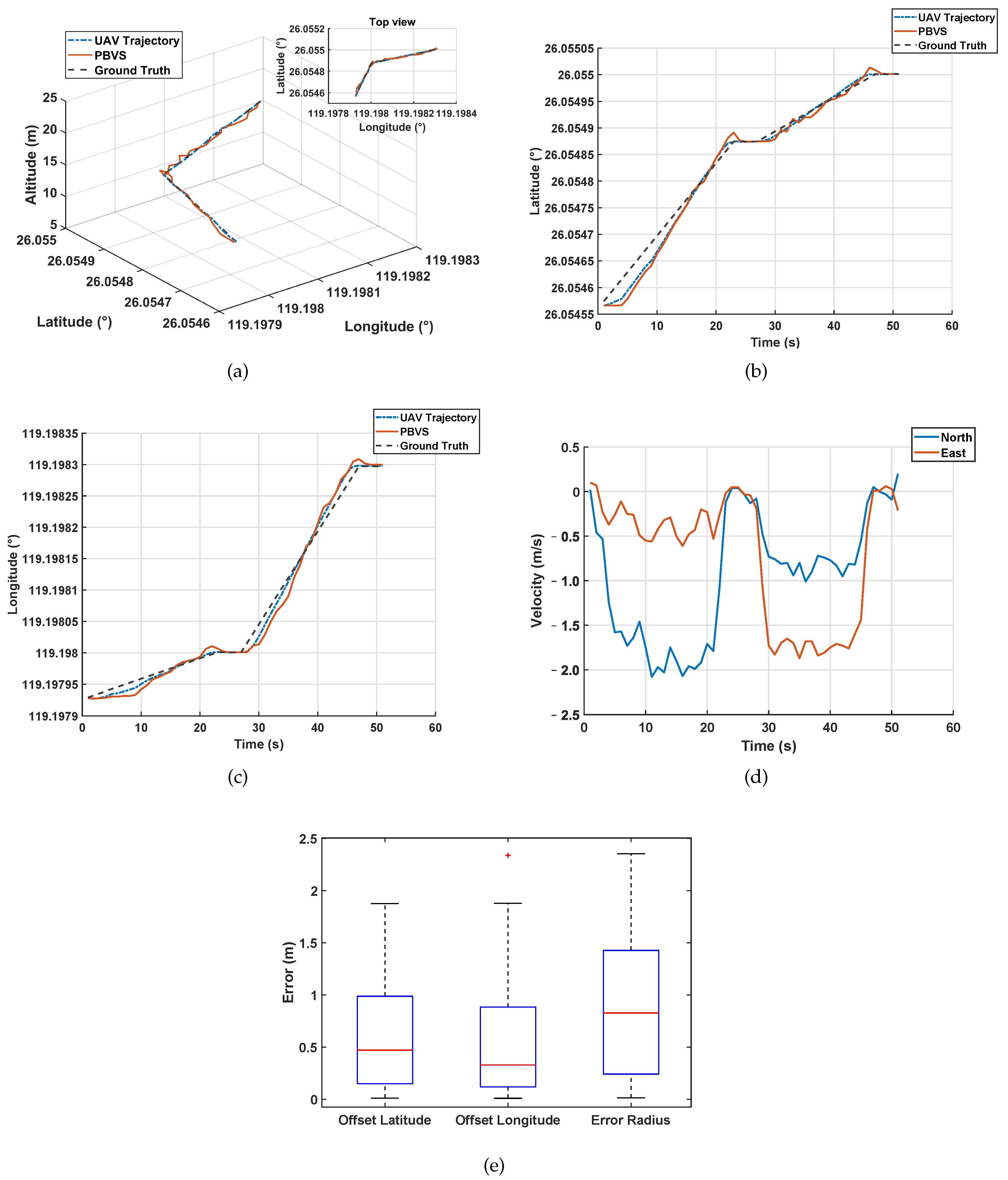
4.2.3. UAV Flight Test
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Z.; Du, Y.; Chen, Y. Simulation and experiment on the safety distance of typical ±500 kv dc transmission lines and towers for uav inspection. High Volt Eng. 2019, 45, 426–432. [Google Scholar]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.K. Uav-assisted emergency networks in disasters. IEEE Wirel. Commun. 2019, 26, 45–51. [Google Scholar]
- Shen, C.; Liu, X.; Cao, H.; Zhou, Y.; Liu, J.; Tang, J.; Guo, X.; Huang, H.; Chen, X. Brain-like navigation scheme based on mems-ins and place recognition. Appl. Sci. 2019, 9, 1708. [Google Scholar]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision uav estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-uav enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar]
- Kang, S.-M.; Park, M.-C.; Ahn, H.-S. Distance-based cycle-free persistent formation: Global convergence and experimental test with a group of quadcopters. IEEE Trans. Ind. Electron. 2016, 64, 380–389. [Google Scholar]
- Rehak, M.; Mabillard, R.; Skaloud, J. A micro-uav with the capability of direct georeferencing. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information SciencesISPRS Archives; ISPRS Archives: Göttingen, Germany, 2013. [Google Scholar]
- Pfeifer, N.; Glira, P.; Briese, C. Direct georeferencing with on board navigation components of light weight uav platforms. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 487–492. [Google Scholar]
- Luo, J.; Mo, B.; Lin, J. A design of high-precision positioning system of uav based on the qianxun location network. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 4633–4637. [Google Scholar]
- Lan, Y.; Shengde, C.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing accuracy and repeatability of uav blocks oriented with gnss-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar]
- Wang, D.; Lv, H.; Wu, J. Augmented cubature kalman filter for nonlinear rtk/mimu integrated navigation with non-additive noise. Measurement 2017, 97, 111–125. [Google Scholar]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. Uavs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Liu, Y.; Ran, Y.; Ke, T.; Hu, X. Code tracking performance analysis of gnss signal in the presence of cw interference. Signal Process. 2011, 91, 970–987. [Google Scholar] [CrossRef]
- Sabatini, R.; Moore, T.; Hill, C. A new avionics-based gnss integrity augmentation system: Part 1–fundamentals. J. Navig. 2013, 66, 363–384. [Google Scholar] [CrossRef]
- Wendel, J.; Meister, O.; Schlaile, C.; Trommer, G.F. An integrated gps/mems-imu navigation system for an autonomous helicopter. Aerosp. Sci. Technol. 2006, 10, 527–533. [Google Scholar] [CrossRef]
- Silva, A.L.; Cruz, J.J. Fuzzy adaptive extended kalman filter for uav ins/gps data fusion. J. Braz. Soc. Mech. Sci. Eng. 2016, 38, 1671–1688. [Google Scholar] [CrossRef]
- Wang, D.; Lv, H.; Wu, J. In-flight initial alignment for small uav mems-based navigation via adaptive unscented kalman filtering approach. Aerosp. Sci. Technol. 2017, 61, 73–84. [Google Scholar] [CrossRef]
- Chen, P.; Xie, Z.; Fang, Y.; Chen, Z.; Mumtaz, S.; Rodrigues, J.J. Physical-layer network coding: An efficient technique for wireless communications. IEEE Netw. 2019, 34, 270–276. [Google Scholar] [CrossRef]
- Zhang, L.; Xiong, Z.; Lai, J.; Liu, J. Optical flow-aided navigation for uav: A novel information fusion of integrated mems navigation system. Optik 2016, 127, 447–451. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (uav) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Kendoul, F.; Fantoni, I.; Nonami, K. Optic flow-based vision system for autonomous 3d localization and control of small aerial vehicles. Robot. Auton. Syst. 2009, 57, 591–602. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Martin, D.; Garcia, F.; Escalera, A.; Armingol, J.M. Survey of computer vision algorithms and applications for unmanned aerial vehicles. Expert Syst. Appl. 2018, 92, 447–463. [Google Scholar] [CrossRef]
- Kanellakis, C.; Nikolakopoulos, G. Survey on computer vision for uavs: Current developments and trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar] [CrossRef]
- Chowdhary, G.; Johnson, E.N.; Magree, D.; Wu, A.; Shein, A. Gps-denied indoor and outdoor monocular vision aided navigation and control of unmanned aircraft. J. Field Robot. 2013, 30, 415–438. [Google Scholar] [CrossRef]
- Nguyen, V.N.; Jenssen, R.; Roverso, D. Automatic autonomous vision-based power line inspection: A review of current status and the potential role of deep learning. Int. J. Electr. Power Energy Syst. 2018, 99, 107–120. [Google Scholar] [CrossRef]
- Tang, Y.; Hu, Y.; Cui, J.; Liao, F.; Lao, M.; Lin, F.; Teo, R.S. Vision-aided multi-uav autonomous flocking in gps-denied environment. IEEE Trans. Ind. Electron. 2018, 66, 616–626. [Google Scholar] [CrossRef]
- Saska, M.; Baca, T.; Thomas, J.; Chudoba, J.; Preucil, L.; Krajnik, T.; Faigl, J.; Loianno, G.; Kumar, V. System for deployment of groups of unmanned micro aerial vehicles in gps-denied environments using onboard visual relative localization. Auton. Robot. 2017, 41, 919–944. [Google Scholar] [CrossRef]
- Benini, A.; Mancini, A.; Longhi, S. An imu/uwb/vision-based extended kalman filter for mini-uav localization in indoor environment using 802.15. 4a wireless sensor network. J. Intell. Robot. Syst. 2013, 70, 461–476. [Google Scholar] [CrossRef]
- Scaramuzza, D.; Achtelik, M.C.; Doitsidis, L.; Friedrich, F.; Kosmatopoulos, E.; Martinelli, A.; Achtelik, M.W.; Chli, M.; Chatzichristofis, S.; Kneip, L.; et al. Vision-controlled micro flying robots: From system design to autonomous navigation and mapping in gps-denied environments. IEEE Robot. Autom. Mag. 2014, 21, 26–40. [Google Scholar] [CrossRef]
- Feroze, O.M.; Karachalios, K.; Nikolaidis, K.N.; Calway, A. Improving drone localisation around wind turbines using monocular model-based tracking. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7713–7719. [Google Scholar]
- Neunert, M.; Bloesch, M.; Buchli, J. An open source, fiducial based, visual-inertial motion capture system. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 1523–1530. [Google Scholar]
- Wubben, J.; Fabra, F.; Calafate, C.T.; Krzeszowski, T.; Marquez-Barja, J.M.; Cano, J.-C.; Manzoni, P. Accurate landing of unmanned aerial vehicles using ground pattern recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef]
- Kim, Y.; Jung, W.; Bang, H. Visual target tracking and relative navigation for unmanned aerial vehicles in a gps-denied environment. Navigation 2014, 2, 3. [Google Scholar] [CrossRef]
- Quintero, S.A.; Hespanha, J.P. Vision-based target tracking with a small uav: Optimization-based control strategies. Control Eng. Pract. 2014, 32, 28–42. [Google Scholar] [CrossRef]
- Pei, C.; Zhang, J.; Wang, X.; Zhang, Q. Research of a non-linearity control algorithm for uav target tracking based on fuzzy logic systems. Microsyst. Technol. 2018, 24, 2237–2252. [Google Scholar]
- McCloskey, S.; Venkatesha, S. Temporally coded illumination for rolling shutter motion de-blurring. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017; pp. 1287–1295. [Google Scholar]
- Liang, C.-K.; Chang, L.-W.; Chen, H.H. Analysis and compensation of rolling shutter effect. IEEE Trans. Image Process. 2008, 17, 1323–1330. [Google Scholar] [CrossRef] [PubMed]
- Mohan, M.M.; Rajagopalan, A.; Seetharaman, G. Going unconstrained with rolling shutter deblurring. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4010–4018. [Google Scholar]
- Rengarajan, V.; Rajagopalan, A.N.; Aravind, R.; Seetharaman, G. Image registration and change detection under rolling shutter motion blur. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1959–1972. [Google Scholar] [CrossRef] [PubMed]
- Young, M. Pinhole optics. Appl. Opt. 1971, 10, 2763–2767. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised human detection with an embedded vision system on a fully autonomous uav for search and rescue operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef]
- Dai, M.; Cheng, S.; He, X.; Wang, D. Object tracking in the presence of shaking motions. Neural Comput. Appl. 2019, 31, 5917–5934. [Google Scholar] [CrossRef]
- Fang, Y.; Chen, P.; Cai, G.; Lau, F.C.; Liew, S.C.; Han, G. Outage-limit-approaching channel coding for future wireless communications: Root-protograph low-density parity-check codes. IEEE Veh. Technol. Mag. 2019, 14, 85–93. [Google Scholar] [CrossRef]
- Xin, Z.; Fang, Y.; Zhang, X. Adaptive control for the on-board pan-tilt camera in an uav ground-target-tracking system. Control. Theory Appl. 2010, 27, 1001–1006. [Google Scholar]
- Li, T.; Corchado, J.M.; Bajo, J.; Sun, S.; Paz, J.F. Effectiveness of bayesian filters: An information fusion perspective. Inf. Sci. 2016, 329, 670–689. [Google Scholar] [CrossRef]
- Kojima, T.; Namerikawa, T. Image-based position estimation of uav using kalman filter. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, Australia, 21–23 September 2015; pp. 406–411. [Google Scholar]
- Borowczyk, A.; Nguyen, D.-T.; Nguyen, A.P.; Nguyen, D.Q.; Saussi, D.; Ny, J.L. Autonomous landing of a multirotor micro air vehicle on a high velocity ground vehicle. Ifac-Papersonline 2017, 50, 10488–10494. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Parameter |
|---|---|
| Camera | GoPro 1920*1080HD, 117 g |
| Image Transmission Equipment | Frequency range 750 MHz, average delay 300 ms |
| Data Transmission Equipment | The communication distance is 1 km, the highest data transmission rate 3300 B/s, and the average delay 5–10 ms |
| PTZ Controller | Self-made (STM32F103,72 MHz) |
| IMU:MPU6500 | |
| Camera Attitude Measurement Unit | Magnetometer:LSM303D |
| Barometer:MS5611 | |
| Battery Type | LIPO/22.2 V/12000 mAh/30 C |
| Ground Station | Intel XEON E5-2678 V3/RTX2080TI |
| RTK | 10 Hz |
| Wheelbase | 680 mm |
| Motors’ Max. Current | 30 A |
| Brushless Motors | X4110S 340 KV |
| Brushless ECS | 40 A |
| PTZ | 3 axis |
| Autopilot | Self-made( STM32F407,168 MHz) |
| Payload Capability | 5.5 KG |
| Hover Time | 13 min |
| Environment | Category | Mean Value | Median | 75th Percentile | 25th Percentile | Max | Min | Outliers | RMSE |
|---|---|---|---|---|---|---|---|---|---|
| Offset X | 0.0804 | 0.0864 | 0.1061 | 0.0604 | 0.1478 | 0.0009 | N/a | 0.0882 | |
| Simulate | Offset Y | 0.074 | 0.0888 | 0.1019 | 0.0391 | 0.1268 | 0.0008 | N/a | 0.0831 |
| Error Radius | 0.1103 | 0.1268 | 0.1502 | 0.0729 | 0.1789 | 0.0011 | N/a | 0.1211 | |
| Offset Latitude | 0.587 | 0.4718 | 0.9879 | 0.1499 | 1.8759 | 0.0111 | N/a | 0.7677 | |
| Actual | Offset Longitude | 0.5457 | 0.3297 | 0.8841 | 0.1199 | 1.8781 | 0.01 | 2.3377 | 0.7577 |
| Error Radius | 0.8744 | 0.8282 | 1.427 | 0.2428 | 2.3541 | 0.0149 | N/a | 1.0786 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Tian, Y.; Lin, L.; Chen, S.; Li, H.; Wang, Y.; Su, K. Obtaining World Coordinate Information of UAV in GNSS Denied Environments. Sensors 2020, 20, 2241. https://doi.org/10.3390/s20082241
Chen C, Tian Y, Lin L, Chen S, Li H, Wang Y, Su K. Obtaining World Coordinate Information of UAV in GNSS Denied Environments. Sensors. 2020; 20(8):2241. https://doi.org/10.3390/s20082241
Chicago/Turabian StyleChen, Chengbin, YaoYuan Tian, Liang Lin, SiFan Chen, HanWen Li, YuXin Wang, and KaiXiong Su. 2020. "Obtaining World Coordinate Information of UAV in GNSS Denied Environments" Sensors 20, no. 8: 2241. https://doi.org/10.3390/s20082241
APA StyleChen, C., Tian, Y., Lin, L., Chen, S., Li, H., Wang, Y., & Su, K. (2020). Obtaining World Coordinate Information of UAV in GNSS Denied Environments. Sensors, 20(8), 2241. https://doi.org/10.3390/s20082241