The Use of Unmanned Aerial Vehicles in Remote Sensing Systems †

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. General Description of UAV WABIK
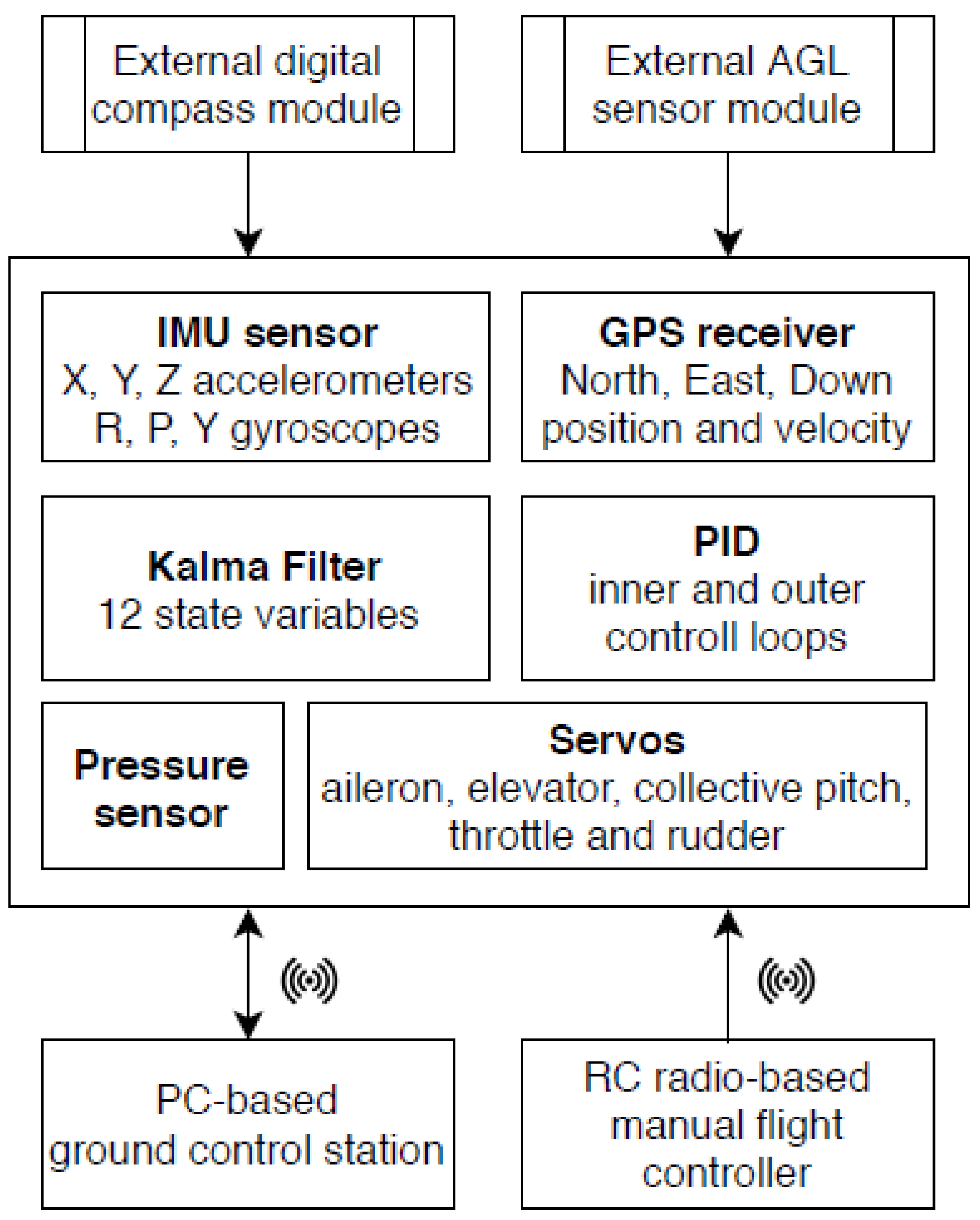
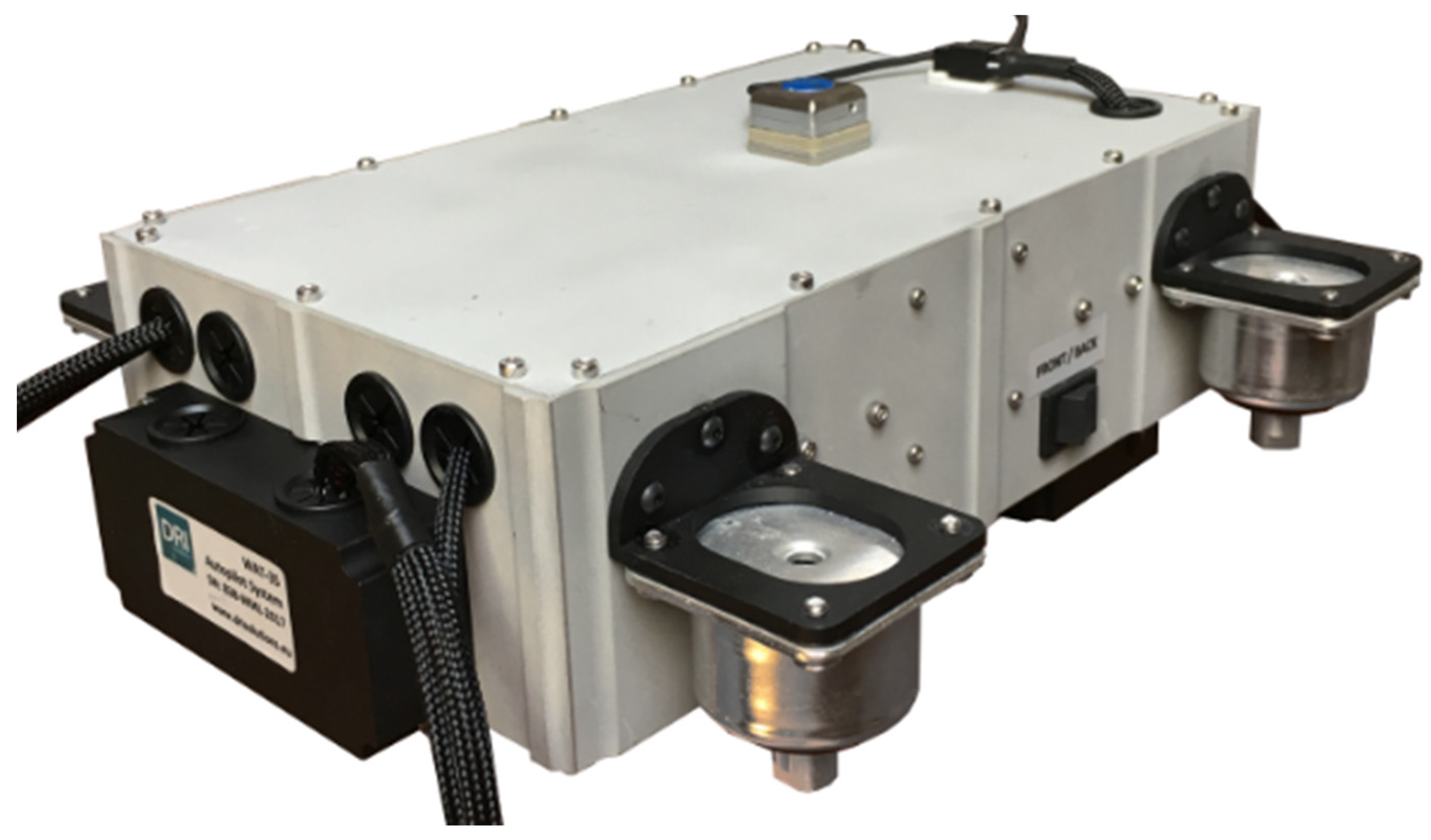
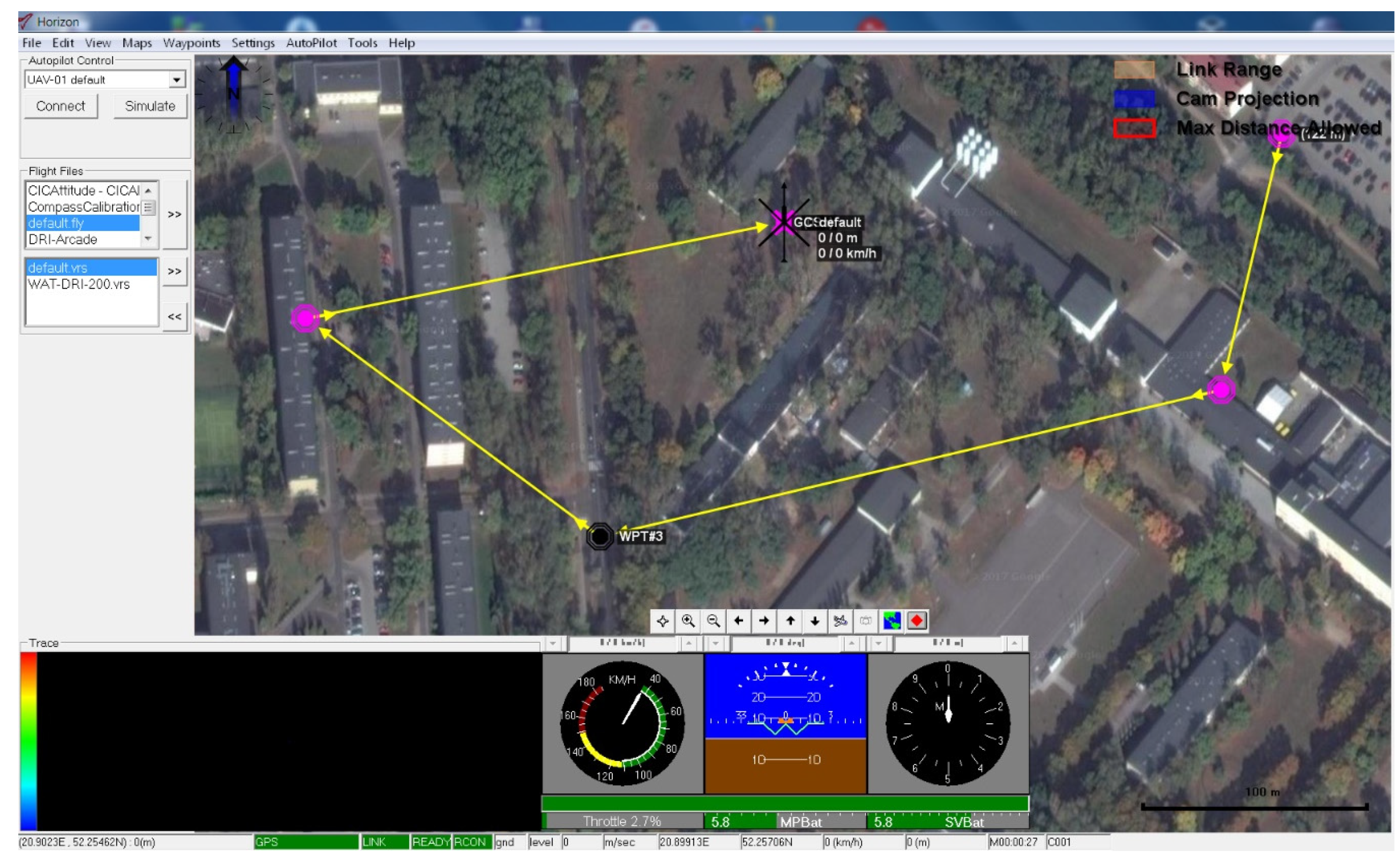
2.2. Flight Control System
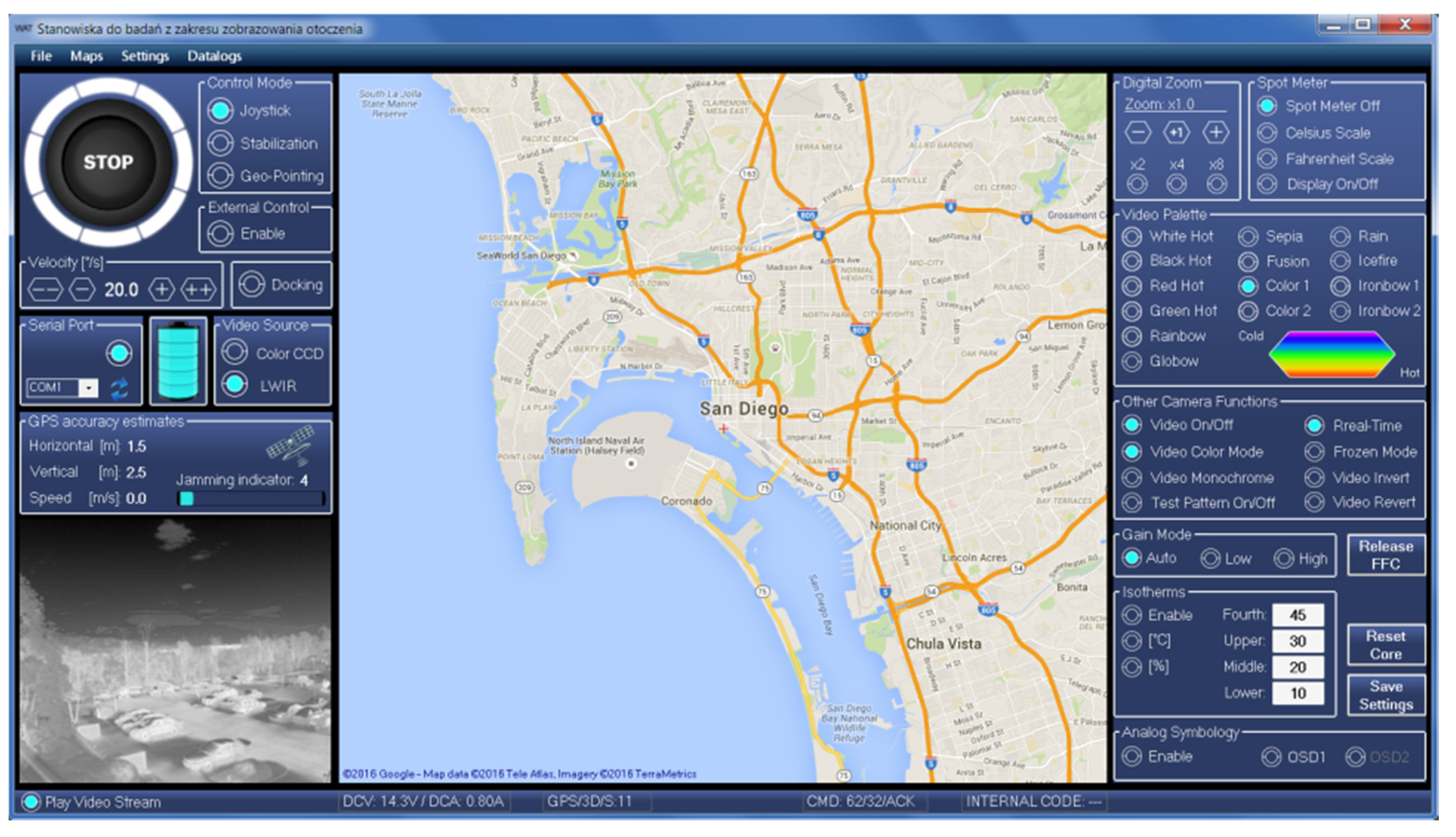
2.3. Optoelectronic Equipment
3. Results
4. Fields of Use
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Olejnik, A.; Kiszkowiak, Ł.; Rogólski, R.; Chmaj, G.; Radomski, M.; Majcher, M.; Omen, L. Precise Remote Sensing Using Unmanned Helicopter. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Torino, Italy, 19–21 June 2019; pp. 544–548. [Google Scholar]
- Schowengerdt, R. Remote Sensing: Models and Methods for Image Processing, 3rd ed.; Academic Press: Cambridge, MA, USA, 2007; p. 2. ISBN 978-0-12-369407-2. [Google Scholar]
- Goetz, S.J. Remote Sensing of Riparian Buffers: Past Progress and Future Prospects. JAWRA J. Am. Water Resour. Assoc. 2006, 42, 134–143. [Google Scholar] [CrossRef]
- Sriharan, S.; Everitt, J.H.; Yang, C.; Fletcher, R.S. Mapping riparian and wetland weeds with high resolution satellite imagery; In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium IGARSS 2008. Boston, MA, USA, 7–11 July 2008; Volume 1, pp. 476–479. [Google Scholar]
- Ma, L.; Li, M.; Tong, L.; Wang, Y.; Cheng, L. Using unmanned aerial vehicle for remote sensing application. In Proceedings of the 2013 21st International Conference on Geoinformatics, Kaifeng, China, 20–22 June 2013; pp. 1–5. [Google Scholar]
- Austin, R.G. Unmanned Multimode Helicopter. Google Patents US4163535A, 1979. [Google Scholar]
- Vanderlip, E.G. Omni-Directional Vertical-Lift Helicopter Drone. Google Patents Patent number US3053480A, 1962. [Google Scholar]
- Abhiram, D.; Ganguli, R.; Harursampath, D.; Friedmann, P.P. Robust Design of Small Unmanned Helicopter for Hover Performance Using Taguchi Method. J. Aircr. 2018, 55, 1–8. [Google Scholar] [CrossRef]
- Godbolt, B.; Lynch, A.F. An unmanned helicopter control with partial small body force compensation: Experimental results. Robotica 2018, 36, 1436–1453. [Google Scholar] [CrossRef]
- Micropilot. Available online: https://www.micropilot.com (accessed on 18 May 2019).
- Brzozowski, B.; Daponte, P.; De Vito, L.; Lamonaca, F.; Picariello, F.; Pompetti, M.; Wojtowicz, K. A remote-controlled platform for UAS testing. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 48–56. [Google Scholar] [CrossRef]
- Brzozowski, B.; Rochala, Z.; Wojtowicz, K. Overview of the research on state-of-the-art measurement sensors for UAV navigation. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 565–570. [Google Scholar]
- Eisenbeiss, H. A mini Unmanned Aerial Vehicle (UAV): System overview and image acquisition. In Proceedings of the International Archives of Photogrammetry. Remote Sensing and Spatial Information Sciences, 36(5/W1), Pitsanulok, Thailand, 18–20 November 2004. [Google Scholar]
- Olejnik, A. Autonomiczne Bezzałogowe Statki Powietrzne Wyposażone w Środki Monitorowania i Nadzorowania Wspomagające Działania Policji i Straży Pożarnej; WAT Internal Report; Military University of Technology: Warsaw, Poland, 2013. [Google Scholar]
- Olejnik, A.; Rogólski, R.; Chmaj, G.; Kiszkowiak, Ł.; Kramarski, I. Public Security Forces Net-Centric Support System Based on Unmanned Aerial Vehicles. In 30th International Conference on Security Engineering - Protection Against Effects of Extraordinary Threats; EKOMILITARIS 2016; Bel Studio Sp. z o.o.: Warsaw, Poland, 2016; ISBN 978-83-7798-195-5. [Google Scholar]
- Aeroscout—Unmanned Aircraft Technology. Available online: https://www.aeroscout.ch (accessed on 21 May 2019).
- Precision Agriculture. Available online: https://www.yamahamotorsports.com/motorsports/pages/precision-agriculture-rmax (accessed on 21 May 2019).
- Chmaj, G. Inspection Flying Robot. Ph.D. Thesis, University of Science and Technology in Cracow, Kraków, Poland, 2010. [Google Scholar]
- Kwang, H.K.; Jang, G.L. Adaptive Two-Stage EKF for INS-GPS Loosely Coupled System with Unknown Fault Bias. J. Glob. Position. Syst. 2006, 5, 62−69. [Google Scholar]
- Olejnik, A.; Kołodziński, E.; Rogólski, R.; Kiszkowiak, Ł.; Chmaj, G.; Kramarski, I. Monitoring and Surveillance Net-Centric System of the Selected Province Area; Współczesne konteksty bezpieczeństwa, Wydawnictwo Wyższej Szkoły Gospodarki Euroregionalnej im; Alcide De Gasperi w Józefowie: Józefów, Poland, 2016; pp. 153–174. ISBN 978-83-62753-69-7. [Google Scholar]
- Olejnik, A.; Danilecki, S.; Zalewski, P.; Łącki, T. Opracowanie projektu i budowa demonstratora technologii ultralekkiego samolotu jako elementu sieciocentrycznego systemu wsparcia rozpoznania i dowodzenia. Mechanik 2011, 84, 633–640. [Google Scholar]
- Olejnik, A.; Danilecki, S.; Zalewski, P.; Łącki, T. Opracowanie Systemu Sieciocentrycznego do Wykrywania i Rozpoznawania Zagrożeń Bezpieczeństwa w Dużych Skupiskach Ludzkich oraz Powodowanych Wybranymi Klęskami Żywiołowymi; WAT Internal Report; Military University of Technology: Warsaw, Poland, 2013. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | MTOW [kg] | Range [km] | Maximum Ceiling [m] |
|---|---|---|---|
| Micro | <5 | <10 | 250 |
| Mini | <25/30/150 | <10 | 150/250/300 |
| Short Range | 25 ÷ 150 | 10 ÷ 30 | 3000 |
| Medium Range | 50 ÷ 250 | 30 ÷ 70 | 3000 |
| Long Range | >250 | >70 | >3000 |
| No. | Control Modes | Controller Number |
|---|---|---|
| 1 | CIC Attitude | 1, 2, 3 |
| 2 | CIC Position | 1, 2, 3, 5, 6, optional 4 |
| 3 | CIC Velocity | 1, 2, 3, 5, 6, optional 4 |
| 4 | CIC Altitude | 1, 2, 3, 4 |
| 5 | Full CIC | 1, 2, 3, 4, 5, 6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olejnik, A.; Kiszkowiak, Ł.; Rogólski, R.; Chmaj, G.; Radomski, M.; Majcher, M.; Omen, Ł. The Use of Unmanned Aerial Vehicles in Remote Sensing Systems. Sensors 2020, 20, 2003. https://doi.org/10.3390/s20072003
Olejnik A, Kiszkowiak Ł, Rogólski R, Chmaj G, Radomski M, Majcher M, Omen Ł. The Use of Unmanned Aerial Vehicles in Remote Sensing Systems. Sensors. 2020; 20(7):2003. https://doi.org/10.3390/s20072003
Chicago/Turabian StyleOlejnik, Aleksander, Łukasz Kiszkowiak, Robert Rogólski, Grzegorz Chmaj, Michał Radomski, Maciej Majcher, and Łukasz Omen. 2020. "The Use of Unmanned Aerial Vehicles in Remote Sensing Systems" Sensors 20, no. 7: 2003. https://doi.org/10.3390/s20072003
APA StyleOlejnik, A., Kiszkowiak, Ł., Rogólski, R., Chmaj, G., Radomski, M., Majcher, M., & Omen, Ł. (2020). The Use of Unmanned Aerial Vehicles in Remote Sensing Systems. Sensors, 20(7), 2003. https://doi.org/10.3390/s20072003