1. Introduction
Indoor positioning has become increasingly important in daily life, which is a logical development as people spend about 80%-90% of their time indoors [
1]. Indoor positioning can be used for a manifold of applications in various environments. Indoor localization can be used to navigate in supermarkets or give location-based discounts [
2]. In hospitals, it can be used to find a specific piece of equipment or to navigate visitors or staff. Localization can help first responders for emergency support and disaster management. In industry, it is utilized to track and navigate automatic guided vehicles or unmanned aerial vehicles in a warehouse [
3].
Positioning is and has been a popular research topic. Global Positioning System (GPS) dominates outdoor localization, thanks to improvements in both hardware and software (
https://gssc.esa.int/navipedia/index.php/GPS_Future_and_Evolutions). Moreover, GPS is free to use contributing to its dominance. However, GPS is unreliable in built-up areas or indoors as no line of sight (LOS) connection is available. In addition, GPS suffers from signal attenuation on through material propagation [
4]. The limited positioning accuracy of several meters [
5] is not sufficient for many indoor localization use cases. Consequently, other solutions have been proposed for indoor localization using i.a. acoustic sensors, infrared detectors, radar, camera, chemical sensors or signals originating from a device assumed to be in the possession of a person [
6]. These solutions all suffer from one or more of the following drawbacks: insufficient accuracy (i.e., no cm order positioning), expensive in either use or installation, spectrum congestion, electromagnetic (EM) interference, privacy violations and insufficient coverage.
Based on the advances in LED lighting, a new solution has recently attracted attention. Visible light positioning (VLP) uses visible light by modulating the light output of illumination sources. There is an ongoing discussion among researchers on the sender/receiver structure and modulation algorithm to use but regardless of the hardware and the algorithm, VLP provides an answer to the previously listed drawbacks. As light can not leave a room (i.e., if the door is shut and the walls are opaque), the communication link between sender and receiver is inherently safe. Moreover, the identity of the receiver or the person in possession of the receiver can remain unknown, preventing privacy violations. Besides, visible light is safe to use in EM sensitive environments. As illumination is present in typical indoor environments, it requires virtually no additional infrastructure to create a VLP-enabled environment. Simulation results indicate centimeter level accuracy for typical system parameters [
7], while practical experiments report an accuracy of 0.1 to 0.2 m [
8,
9].
Although VLP can solve many of the previously listed drawbacks, some challenges still need to be solved to achieve worldwide employment of VLP. The first challenge is multi-path reflections. The positioning accuracy is limited in corners due to these reflections [
10]. Secondly, VLP systems need LOS connections to achieve accurate positioning accuracy. Lastly, tilt introduces a constant error that needs to be tackled. Tilt can occur at the receiver as well as at the emitter [
11].
Recently, a variant on VLP is being investigated—Visible Light Sensing (VLS). VLP focuses on localization while VLS focuses on presence detection of certain objects, mostly humans. VLS will exploit the influence of the object on the reflection pattern within the environment. This influence is used for sensing and can be used to improve localization accuracy of VLP. Furthermore, a hybrid system with any local positioning technology can be made.
A smart lighting and heating system in a typical office environment can be implemented based on visible light human sensing. Inefficient lighting and heating lead to high energy consumption and unnecessary costs. By installing efficient lighting and advanced lighting controls, costs can be reduced with 30% to 50% [
12]. Current sensing technologies consist mainly out of infrared (IR) sensors. The person is detected on entering and on movement. If the human becomes immobile, the IR sensor will no longer detect the human, so the lights will switch off. In a VLS system, the human is still detected, even when standing still, which is an improvement over IR-based sensing systems.
In this paper, a passive VLS system is tested. A passive VLS system consists of unmodulated light and a receiver that is fixed in the environment. Wang et al. [
13] listed the challenges and opportunities of passive VLS. There is no control over the objects’ shape, which implies no one-size-fits-all solution. Receivers can only sense an object when it moves under the limited field-of-view (FOV) of the receivers. Hence, high-density employment of receivers will be required to provide fine-grained results. Nevertheless, research is performed to limit the number of receivers by focusing on smart deployment.
Light nodes, including both the LED light and the photodiodes, are proposed in Reference [
14] to detect objects passively. The LED is modulated, so the source of incident light can be identified at the photodiode (PD) based on the received frequencies. Experiments detect whether a door is open or closed. Based on this work, Eyelight [
15] is an extension that focuses on human movement and occupancy detection. Occupancy detection, using a machine learning approach, achieves an overall classification accuracy of 93.7% in a 45 m
room.
A first full passive system is described in [
16]. Battery-free radio-frequency identification (RFID) sensor tags equipped with photodiodes are embedded in the floor. The receivers detect a shadow caused by a human that passes. When a test subject walks slowly (
), there is a 100% detection rate. If the test subject walks faster (
), the detection rate drops to 93.3%. However, as the receivers are embedded in the floor, a large scale deployment is infeasible.
Another full passive system is found in Reference [
17]. Ceilingsee uses a modified LED that functions both as receiver and as emitter. The focus of this paper is on occupancy detection in a meeting room. An accuracy above 90% can be obtained in an experimental environment for both static and dynamic scenarios, which indicates that VLS is able to perform human detection accurately.
To the best of the authors’ knowledge, this paper is the first reported work on the influence of a single human on the reflection pattern for visible light in a LED-PD ceiling-mounted environment. It offers the following contributions:
First reported experimental results on the influence of a human on received signal strength: the influence of clothing color and walking direction of a test subject on the received signal strength are investigated;
Influence of receiver height on received signal strength: experimental results for a room height of 3 and 4 m are reported for a single LED, single PD deployment;
Experimental human detection system: a human detection system is tested using various test subjects. A 100% detection rate is achieved in a controlled lab environment;
Influence of separation between LED and PD is experimentally assessed: different LED-PD separation distances are investigated (30 cm to 150 cm). The influence of the distance between LED-PD is significant.
The outline of this paper is as follows—
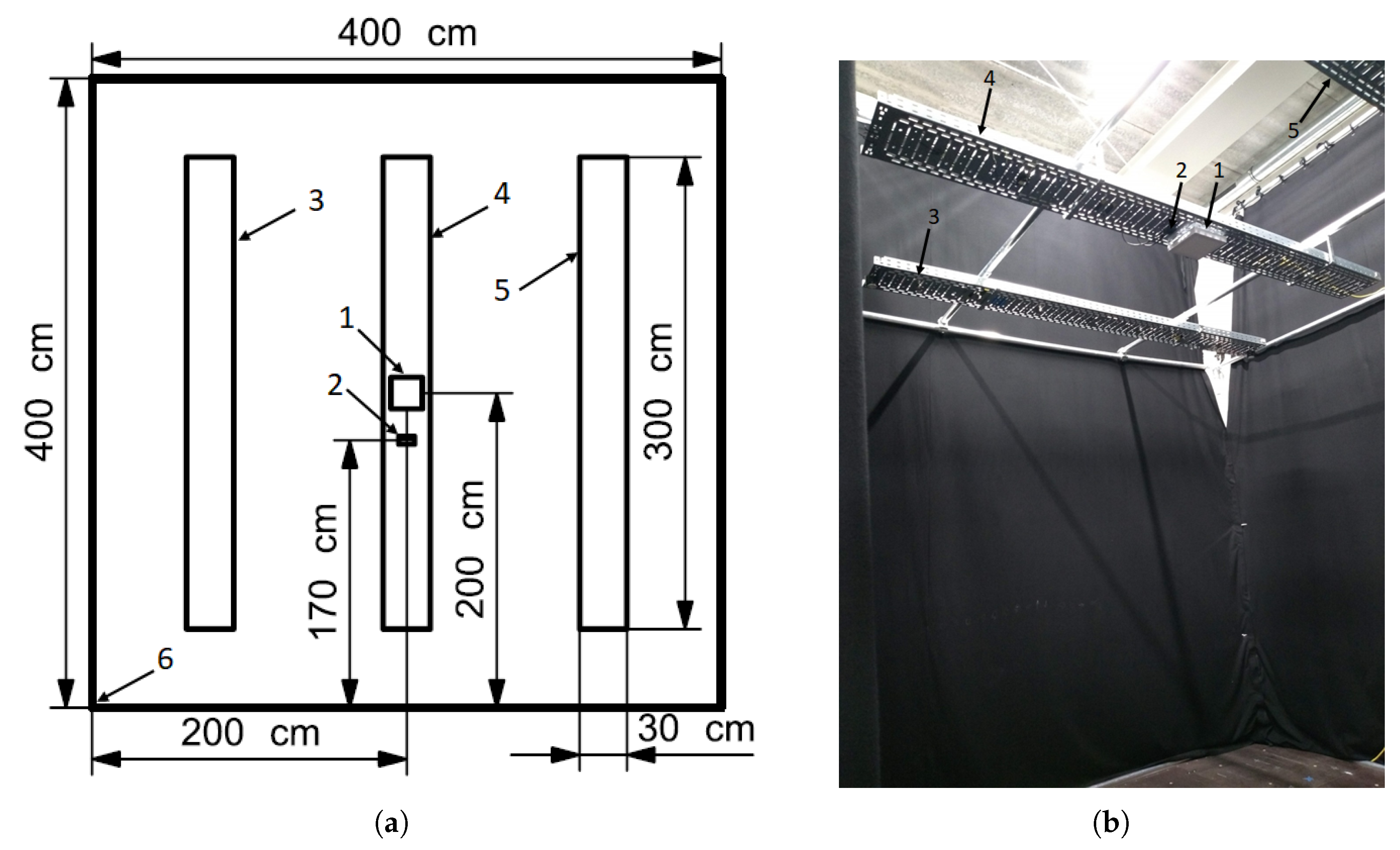
Section 2 provides information about the lab environment and the testing methods used to gather the
RSS plots presented in
Section 3.
Section 4 investigates the possibility to design a robust human pass-by detection system.
Section 5 discusses two important human sensing scenarios. Finally, future work and conclusions are summarized in
Section 6.
3. Results
3.1. RSS Drop
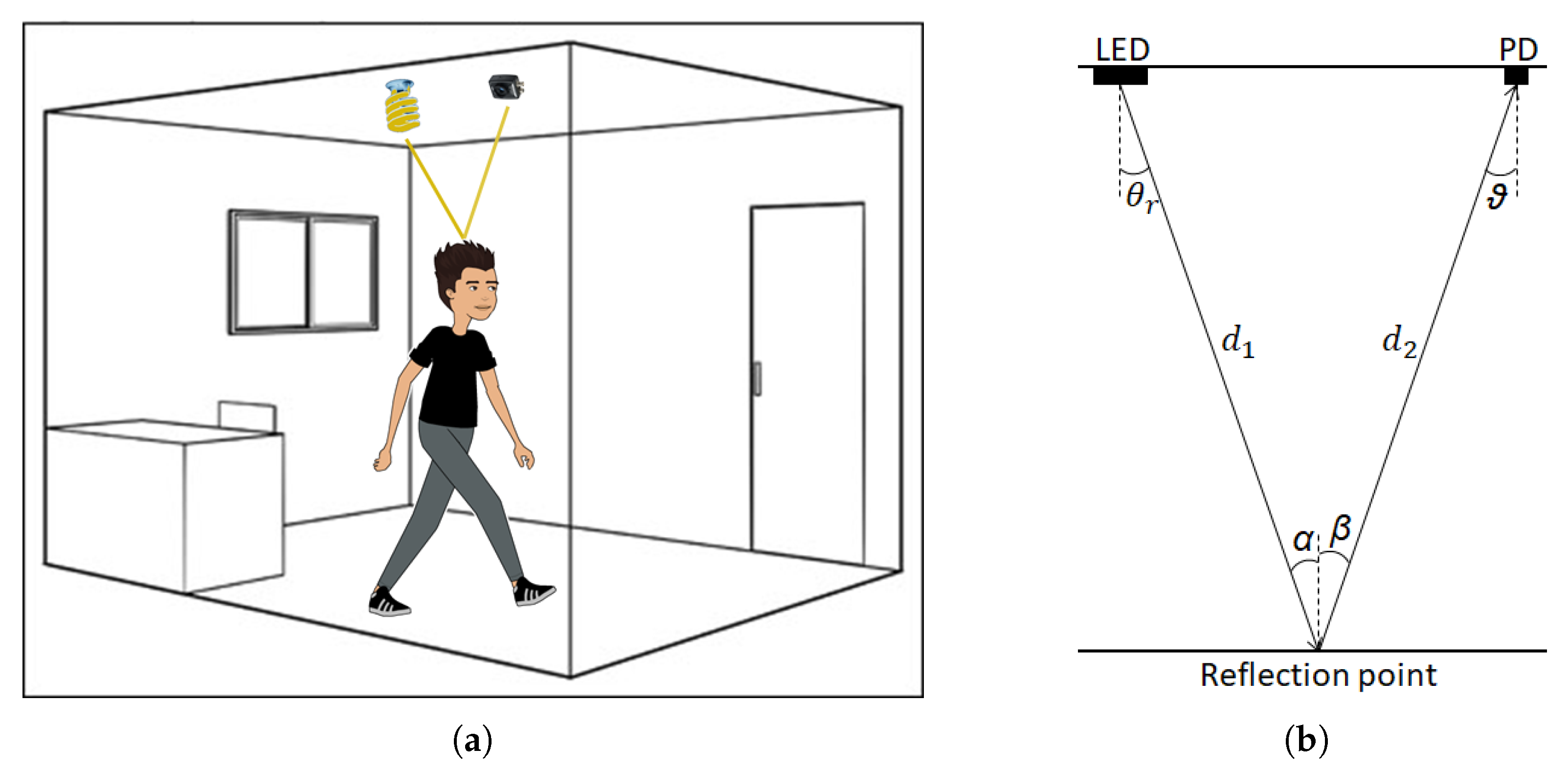
The influence of different configurations on the reflection pattern within the room will be reported. Within every
RSS pattern (from (
3)), an RSS drop, that is, a decrease in the RSS values will be observed. As a person is standing under and between the PD-LED combination, the reflections will scatter on the human and block the first order reflections on the floor. First order reflections are reflections that have reflected only once. These first order reflections lead to a higher received power and a higher influence on the
RSS pattern. However, the human will also introduce new first order reflections. A human shape is more rounded than a floor and therefore introduces a more diffuse pattern. The logical result of the presence of a human is thus that the
RSS value will reach a minimum, that is, a drop.
To objectify this RSS drop, certain assumptions are made. As stated before, the drop occurs in the vicinity of the LED-PD combination. Hence, the extent of the occurrence area of the
RSS drop is limited and is determined by the separation between the LED and the PD. Regarding the position of the LED as the center, the area spans two times the distance between the LED and the PD, creating a square. The occurrence area can thus be summarized as follows:
.
is the y location of the LED and
is the y location of the PD. In the default layout of the lab, the numerical values of the ranges are thus:
with
= 200 cm and
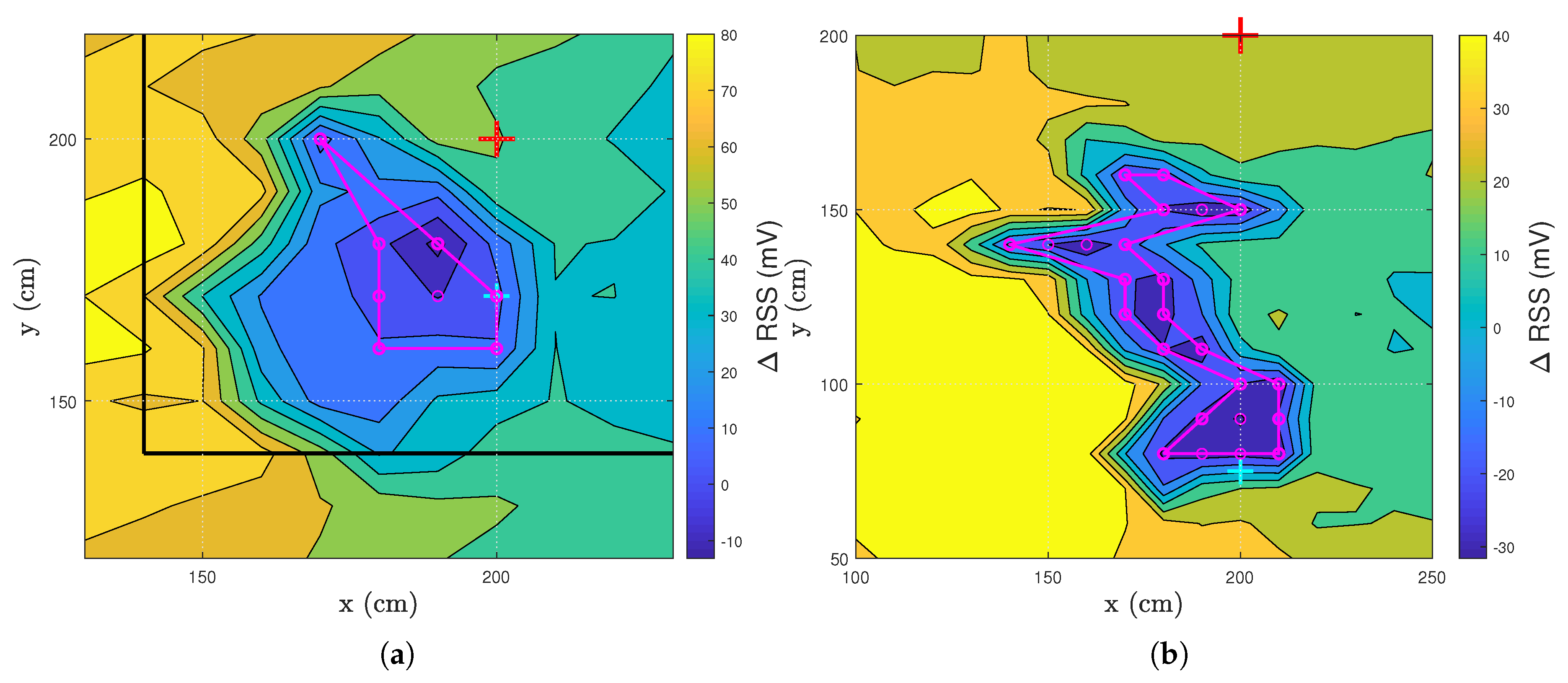
= 170 cm. The extent of the occurrence area is shown by the black square in
Figure 4a. The full extent can be seen in
Figure 5a.
To find all locations that correspond to the RSS drop in the occurrence area, the RSS value has to be below a certain threshold. The threshold is calculated based on the difference between the maximum (
) and minimum (
) RSS values. For an RSS value to be included in the drop, the value has to be lower than 25% of all the RSS values, which is an empirically chosen value based on the area of the lab environment and the field of view (FOV) of the receiver. This is summarized in following equation defining the threshold for an RSS drop range
This is a labor-intensive way to determine a threshold as it requires a full room measurement. Further research is needed to determine an accurate threshold based on fewer measurements. When historical data is available (from similar environments), machine learning can be used to predict thresholds. Furthermore, researchers are focusing on accurate modeling of visible light propagation. If the source, ambient light and first order reflections can be characterized accurately, thresholds could be predicted based on simulated data. The extent of the occurrence area and the place where the RSS drop occurs in regard to the LED-PD will remain valid in other environments.
Based on this drop, a manifold of applications can be created. In this research, two are considered. The first is to create a human pass-by detection system. As the movement of a human introduces the RSS drop, he/she can be detected. Secondly, if temporal data and the walking direction of the human are available, coarse localization can be performed.
In
Figure 4, two
RSS drops are studied in detail.
Figure 4a,b is a detailed view of later mentioned results. The magenta circles indicate that the
RSS value at that location is lower than the threshold specified in
Table 1. This location is thus considered to be within the
RSS drop area. The magenta lines delineate the boundaries of this drop area. The size of the drop area indicates how easily someone can be detected near the LED-PD.
Table 1 summarizes important parameters of all results that will be discussed in the following sections: minimum RSS value (mV), maximum RSS value (mV), threshold for a value to be regarded as a drop (mV) and the area of the drop (dm
).
Figure 5a equals
Figure 6a and
Figure 7a so is only included once.
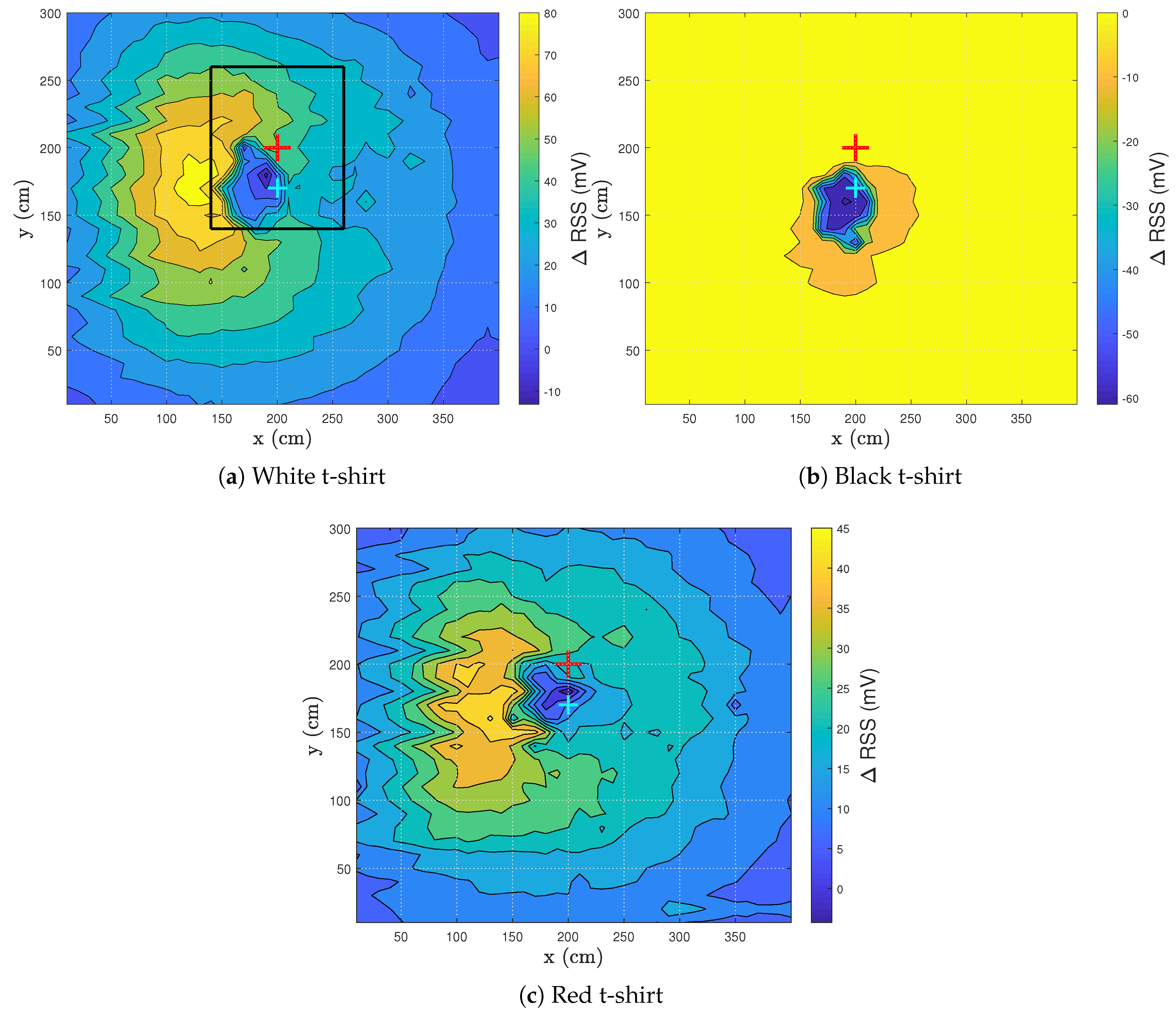
3.2. Influence Clothing Colors
Figure 5 shows the
RSS pattern of three different colors of worn t-shirts. A white (
Figure 5a), black (
Figure 5b) and red (
Figure 5c) t-shirt were worn by the test subject.
When light strikes a surface, some of its energy is reflected and some is absorbed. The color a person perceives indicates the wavelengths of light being reflected. White light contains all wavelengths of the visible spectrum, so when “white” is being reflected, that means all wavelengths are being reflected and none of them absorbed, making white the most reflective color [
24]. As white is the most reflective color, the RSS values are expected to be the highest when wearing a white t-shirt. If a black t-shirt is worn, the RSS values are expected to be very low. Other colors will have different RSS values and are determined by i.a. the responsivity of the used PD, the reflective coefficient of the color and the light source.
Figure 5a shows the reflection pattern when walking from right to left while wearing a white t-shirt. The location of the drop is visible in
Figure 5a with a minimum RSS value of −13.1 mV at location (190,180). The maximum of 85.83 mV (see
Table 1), here at location (140,180), can be elucidated by considering the reflections in the environment. The highest reflecting part of the floor is unblocked as there is a clear reflection path between the PD and the LED. In addition, the person is standing with his back at the LED-PD combination. As the back is smoother than the front of a person, the light will have a higher probability of reflecting towards the PD rather than be scattered across the room. The back will add a more specular reflection.
It can also be established that zones appear in which the RSS has the same magnitude, indicated by equal colored zones. This phenomenon will be useful when VLS tracking is performed. The person will have a specific RSS lapse when walking in a VLS-enabled environment. However, the initial walking direction of the person must be known before tracking can be performed. If the RSS lapse is analyzed, the walked route can be discovered. In corridors, the walking direction is restricted to two directions, so it is beneficial to focus on corridors for visible light sensing or localization in future research. When enough data is gathered, machine learning can be utilized to analyze new data and predict the route a person of interest took.
In
Figure 5b, the only zone where a human can be detected is the
RSS drop. Due to the limited reflection of a black t-shirt, the
RSS value does not alter throughout the room. Hence no differentiation can be made between noise and the reflections coming from the test subject. This result presents a challenge for VLS. Further testing will need to prove the feasibility of a VLS system when dark clothes are worn. However, in the area of the drop, a minimum
RSS value of −60.99 mV is obtained. This is more than 4 times the magnitude than when a white t-shirt is worn (−13.12 mV). The area of the drop increases to 7.5 dm
(
Table 1). According to these two values, a human is detected easier in the zone of the drop when wearing a black t-shirt.
Figure 5c shows that when the test subject wears a red t-shirt, a similar pattern is obtained as for the case when wearing a white t-shirt. A red t-shirt is chosen as a center color between the extreme colors black and white. The RSS range is half as wide (50.4%) as when a white t-shirt was worn. The minimum and maximum are respectively higher and lower, as seen in
Table 1. The reflection originating from a t-shirt is clearly captured in these experiments. The remainder of the tests will be performed wearing a white t-shirt.
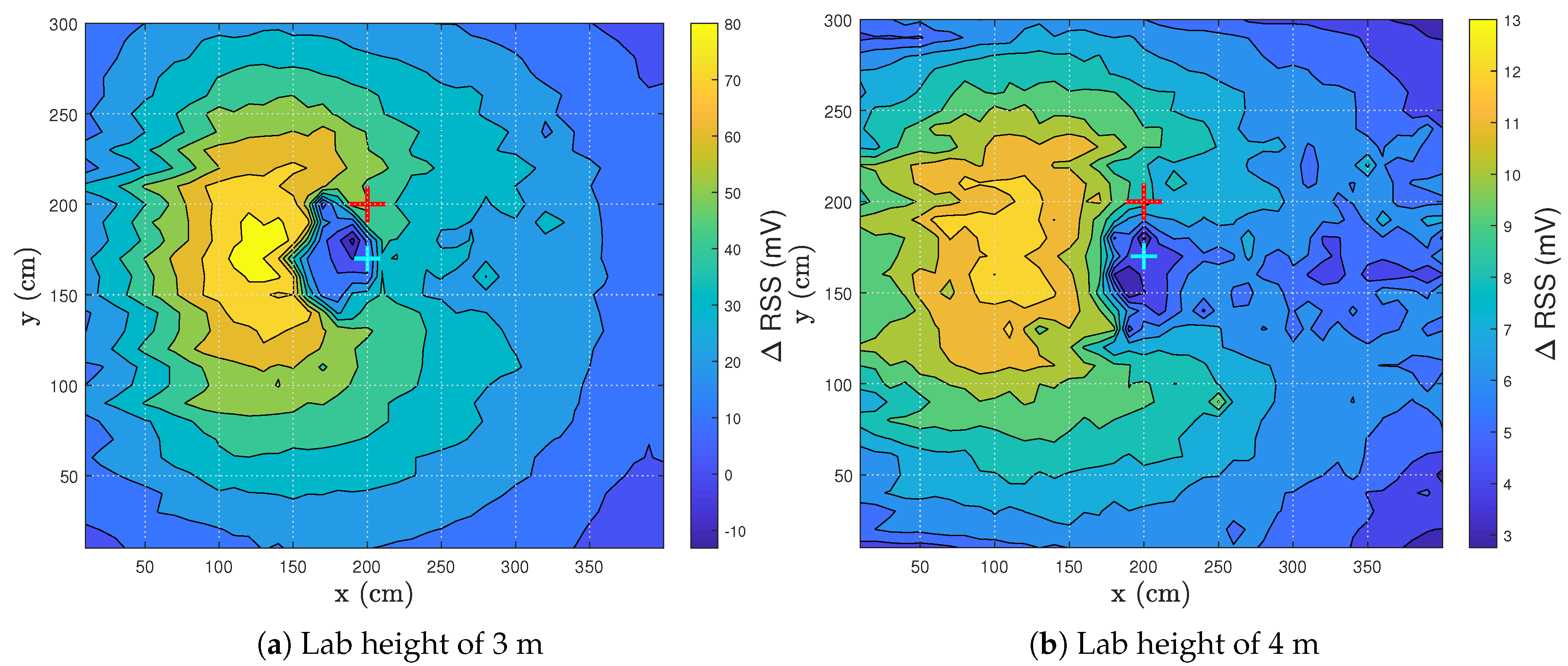
3.3. Influence of Photodiode Height
Here, the influence of the path length between the Tx and Rx is investigated. As seen in (
2), the length of the path will affect the RSS values. The height of the lab was changed from 3 m to 4 m. The test subject remained oriented from right to left. The PD gain remained the same so as to compare the results. The RSS pattern of both measurements is given in
Figure 6.
At a height of 3 m, a
RSS difference (
) of 98.95 mV was obtained. If the influence of the empty environment was not filtered out (
in (
3)), the maximum RSS value was 262.26 mV.
equals 176.43 mV. The person thus added a maximum RSS value of 85.83 mV to the measurement, which is an increase of ± 50.
At the height of 4 m, the RSS difference equalled 15.77 mV. Here, the maximum RSS value was 94.77 mV. equalled 81.76 mV. The person thus added a maximum RSS value of 13.01 mV to the measurement, which was an increase of ± 16.
The test subject has a stronger influence on the RSS if the ceiling height is lower—the path length is shorter at 3 m than at 4 m, which entails less attenuation of power and accordingly higher RSS values. Of course, by changing the height of the ceiling, not only the path length changes but also the angles of irradiance and incidence change in the contribution of the relative elements. Although the influence changes, the RSS pattern exhibits similar behavior, which shows the repeatability of a VLS system.
As the room height increases, a maximum height will be found where human sensing is still possible achieving a certain accuracy. If the height of the room surpasses this maximum, VLS will no longer be feasible. Of course, by altering specific parameters (e.g., the gain of the receiver, the transmitted power of the light), this maximum could increase.
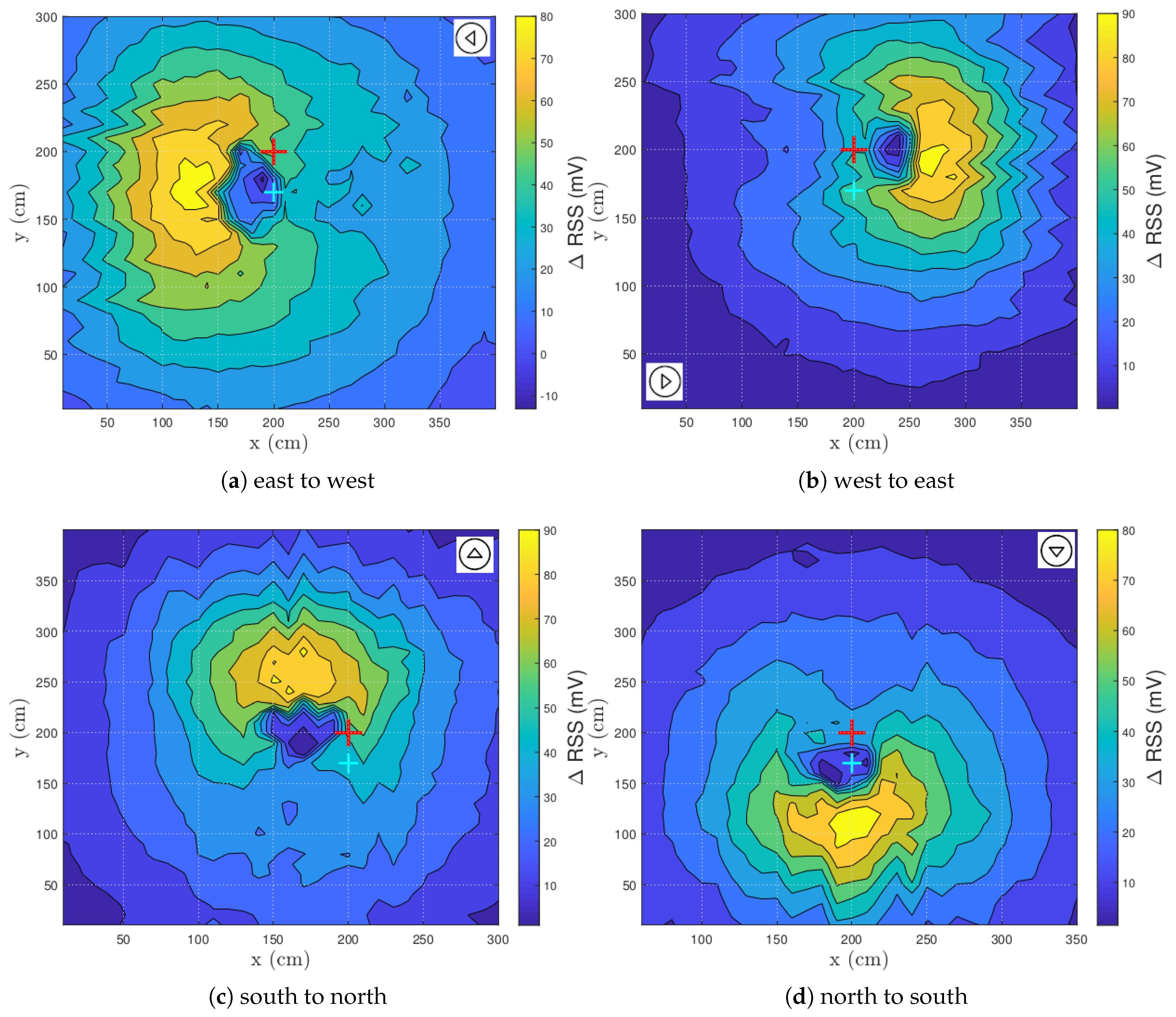
3.4. Walking Direction Relative to LED-PD
By changing the walking direction of the test subject in the lab and thus the test subject’s orientation, a rotation point might be detected. The rotation point can be defined as a point around which the RSS pattern turns if the person’s orientation changes. The standard walking direction is orientated from right to left (E → W).
Figure 7 shows the RSS patterns of the various walking directions: E → W (
Figure 7a), W → E (
Figure 7b), S → N (
Figure 7c) and N → S (
Figure 7d). The arrow in the figures displays the orientation of the test subject. The PD and LED positions are constant throughout every experiment performed in this section.
First, a drop was observed for every
RSS pattern. Second, the
RSS magnitude was stable for all the results, as can been seen in
Table 1. In case the standard walking direction is considered (
Figure 7a), the minimum drops below zero. The area of the drop equaled 4.5 dm
. If the test subject turns 180 degrees, the area of the RSS drop decreases a little to 3 dm
. The area was smaller because the RSS points below the threshold were located closer together. However, if the test subject walks from north to south or vice versa, the area of the drop increases to respectively 7.5 dm
and 12 dm
. The increase occurs due to the extra blockage of the light as the human is standing perpendicularly on the direct reflection path between the LED and the PD. As a consequence, the reflective surface increases (back/chest vs. side).
According to these experiments, a clear rotation point cannot be found. However, this is an expected result as a human’s shape resembles an ellipse rather than a circle and the LED-PD does not rotate as the human does. Nonetheless, a similarity across the various human orientations can be established. A drop (i.e., hair reflections) precedes a maximum (i.e., t-shirt reflections) in every walking direction in the vicinity of the LED-PD combination. If the orientation of a test subject is known, coarse localization can be performed.
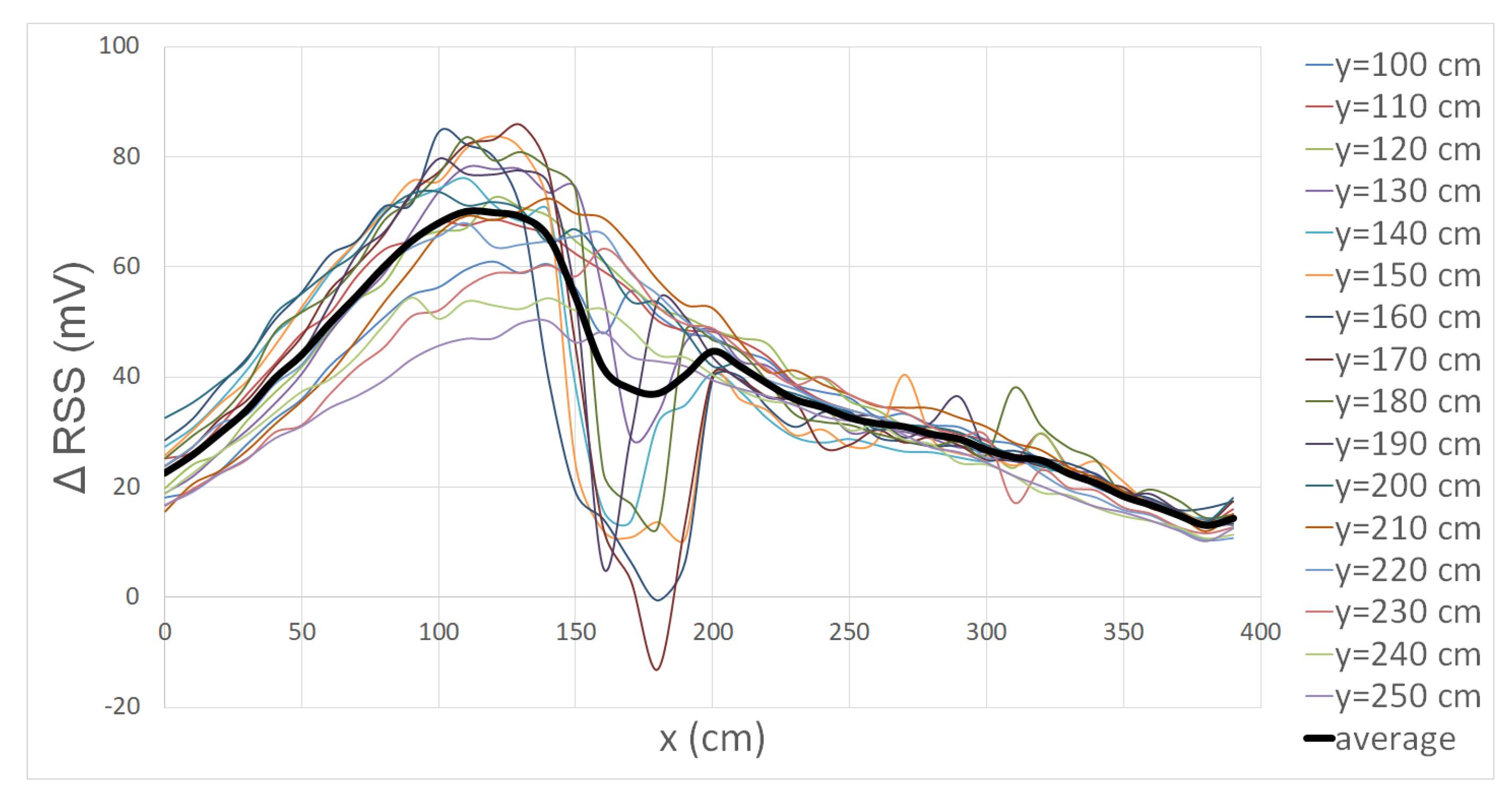
Figure 8 shows the
RSS lapses from y = 100 cm to y = 250 cm from
Figure 7a and the average of all those lapses, indicated by the thick black line. The walking direction of the test subject is from right to left. Based on the average, very coarse localization can be performed. If a
RSS is higher than 50 mV, the position will be between x = 50 cm and x = 150 cm. If the
RSS is under 30 mV, the location will be between x = 250 cm and x = 390 cm or between x = 0 cm and x = 25 cm. If multiple subsequent RSS values are given, the drop could be used to improve the localization as the relative position to LED-PD combination is then known. Other orientations show similar behavior, so that similar localization could be performed. The localization accuracy has not been tested, but it can be predicted that in the vicinity of the LED-PD combination, the position error will be low (less than one meter). However, if the distance to the LED-PD combination increases, the position error will increase as well. A possible extension could be to divide the
RSS lapses into several clusters based on the y-location so not only x-location can be performed, but y-location can be achieved as well.
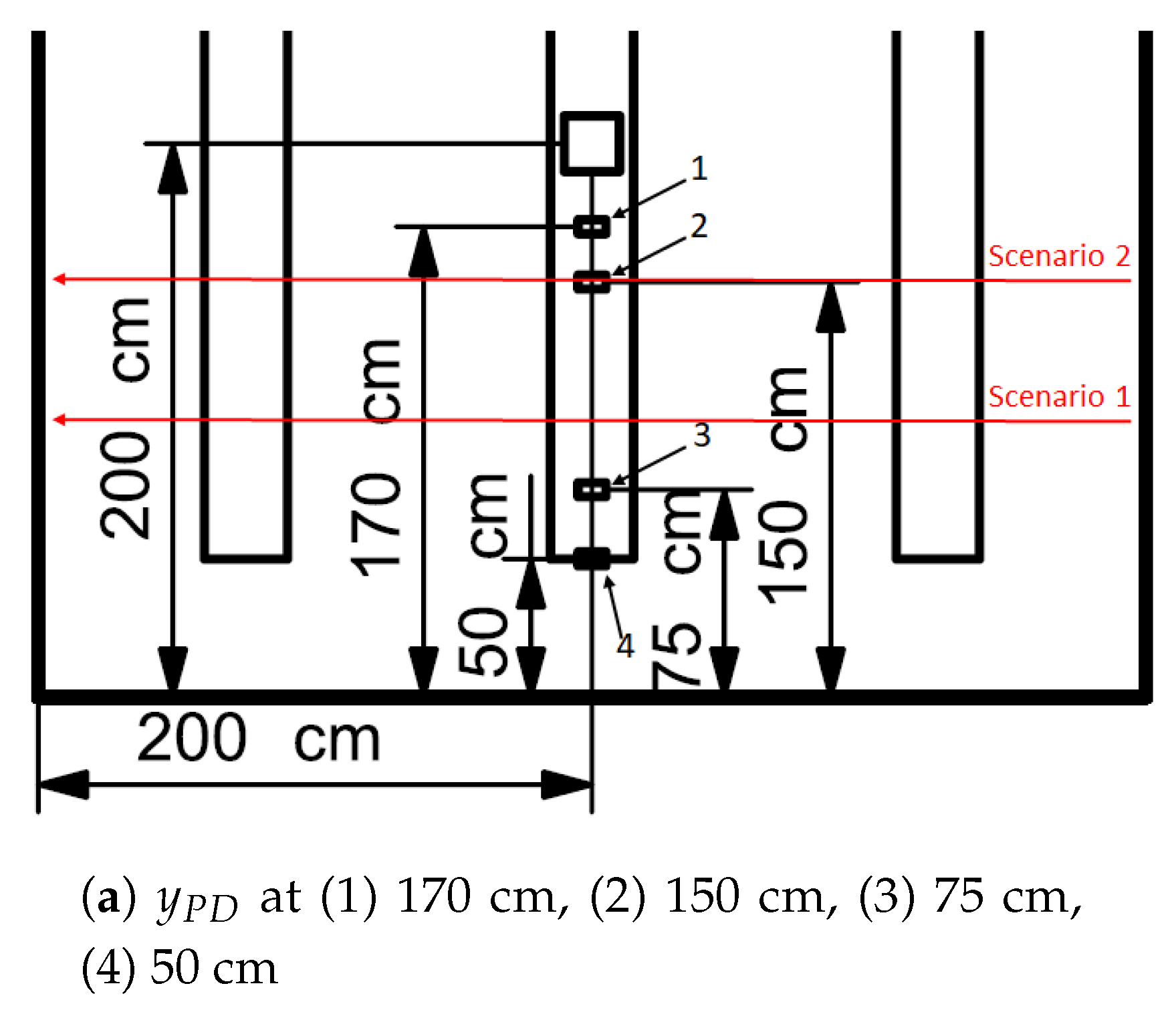
3.5. LED-PD Separation Distance
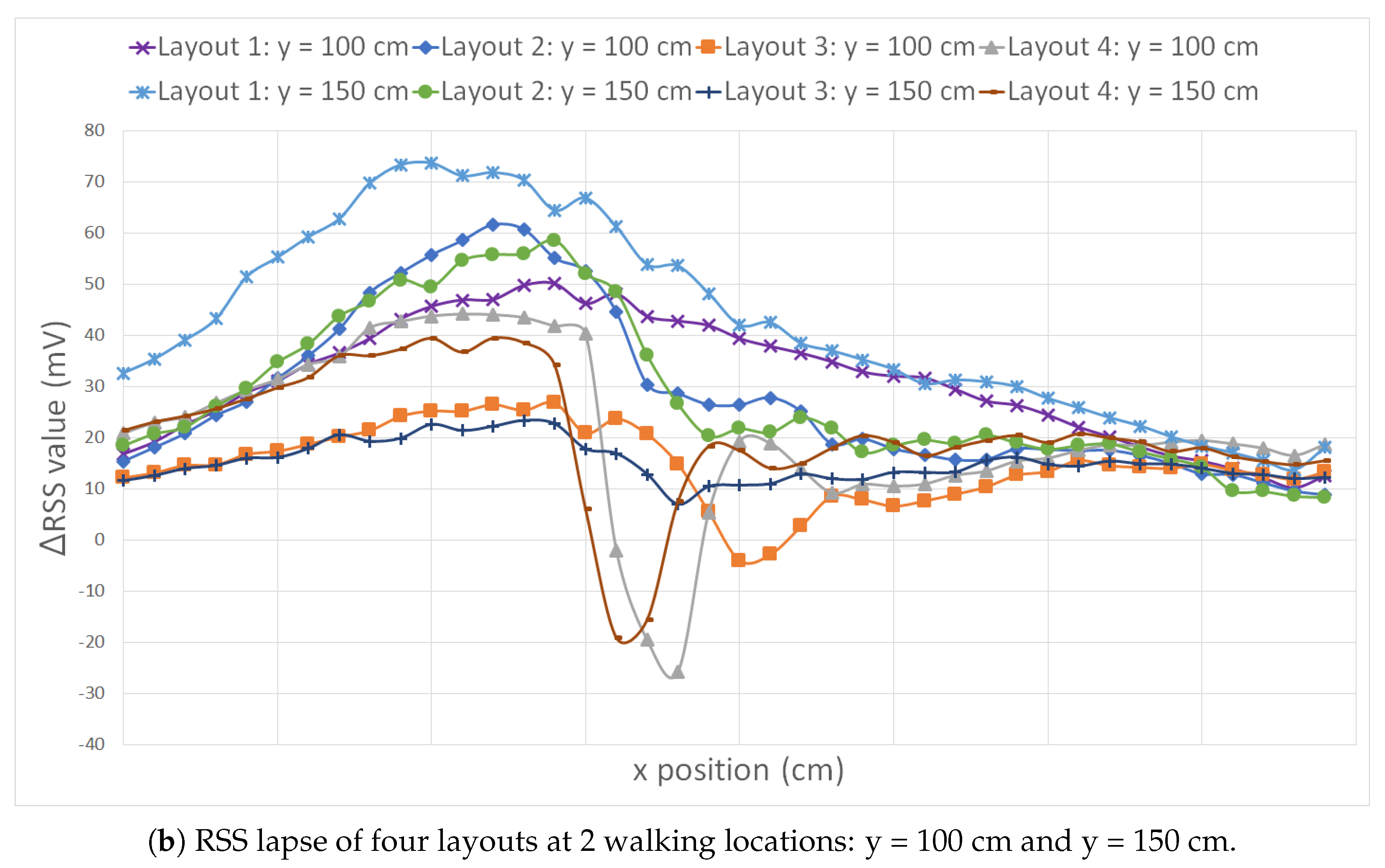
The separation between the LED and PD is changed to take control of the RSS pattern. The goal is to get a more distinct pattern. The location of the PD was changed on a one-dimensional axis. The purpose of a more distinct pattern is to create a system where a person can be detected rather than located. This is done in such a way that an elongated zone is created where the RSS value is minimal. The RSS drop is expected to elongate, as a test subject will block the first order floor reflections between the LED and PD more frequently. By elongating the drop, there is a higher chance that a human could be detected if the RSS value subsides below a threshold. Four layouts are considered, out of which one is chosen. However, due to space consideration only 2 RSS lapses of all four layouts are given. A graph is included that holds the RSS lapse when the test subject walks at y = 100 cm and y = 150 cm of each of the four layouts (
Figure 9b). Hereafter, the test subject walking at y = 100 cm is referenced to as scenario 1 while walking at y = 150 cm is addressed as scenario 2. The different layouts are summarized in
Table 2. Layout 1 is the default layout used in previous experiments. These scenarios and layouts are indicated in
Figure 10a.
The influence of the LED-PD separation is plainly visible in the graph. The relative RSS values have different minima and maxima. The maxima and minima for scenario 1 for all the layouts are summarized in
Table 2. In layouts 1 and 2, there was no noticeable drop as the test subject does not block the first order reflections. In layout 3, where the test subject is now blocking first order reflections, a drop is perceived. The most substantial drop however is obtained in layout 4. The influence of the separation between the LED and PD is clearly visible based on these results. The influence of the separation between the LED and the PD becomes even more significant when the influence of the environment is not filtered out i.e.,
not filtered out. These results are also included in
Table 2. The difference between the maximum value for layouts 1 and 4 equals to 82.26 mV. This indicates the importance of the LED-PD separation and the possibility to alter this distance in order to satisfy different use cases.
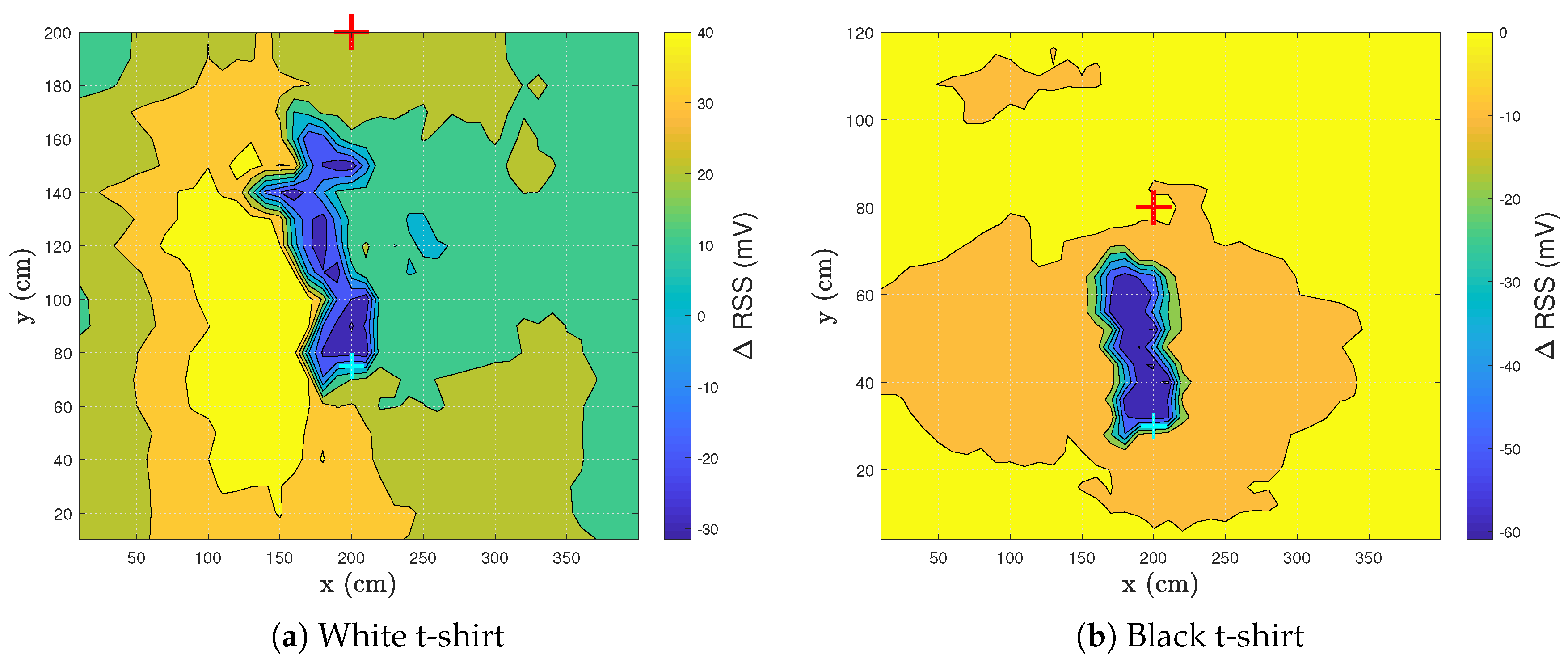
Based on the previous findings, the y-location of the PD was changed from y = 1.75 m (layout 1) to y = 0.75 m (layout 3).
Figure 10a shows the
RSS pattern of this setup. The same test subject was used and the subject wore a white t-shirt. The drop was elongated and more pronounced compared to the default layout (see
Table 1). The area of the RSS drop increased from 4.5 to 13 dm
, which had as a positive effect that a human is more easily detectable. As the drop is now elongated, an accurate detection pass-by system can be designed and tested (
Section 4). A drawback of the more accurate detection is that localization is now more difficult.
The tests were also conducted wearing a black t-shirt (
Figure 10b). The zone where a human can be detected is limited to the drop. However, the drop itself followed a similar pattern as to when a white t-shirt was worn. The area of the drop was even more elongated, now spanning 16.5 dm
(
Table 1). A human detection system can thus be designed regardless of the color of the t-shirt as long as the test subject is walking in the occurrence area of the drop.
5. Discussion
This paper focuses on an environment without external variable light sources (e.g., sunlight) that is static, except for the passage of humans (e.g., toilet, printer room, etc.). The need for sensing is high in a multitude of environments. Self-driving cars may be the most important, as correct human sensing can save lives. Self-driving vehicles are fitted with multiple sensors such as cameras, LiDAR and ultrasound. However, it is interesting to add multiple photodiodes to a car as well as this can enable infrastructure-to-vehicle (I2V) and vehicle-to-vehicle (V2V) communication [
25]. Based on the current sensing model, where a PD and light are ceiling-mounted, a similar model could be used to detect humans traversing lighting posts. Especially at crossings, such information is vital. If a human is detected, the lighting post can communicate with the vehicle (through VLC or RF) and thus warn it about human presence. If a car receives this information, it can distribute this towards other vehicles (V2V) [
26].
Another environment where human sensing is vital is in industrial scenarios. In (partially) automated warehouses, pedestrian movements must comply with strict rules (e.g., where to walk and when to cross). A similar model as the one proposed in this paper can be used to detect human traffic in specified zones. Either it can be used to count the number of people crossing a defined area or it can be used to detect improper walking behavior. If a detected person is not detected by subsequent VLS nodes (and he/she did not leave the VLS enabled zone), it might indicate that this person has fallen and requires help. However, in an industrial setting, the environment is highly dynamic and challenging for VLS due to high noise (e.g., dust, tilt) and high ceiling heights. It must be investigated if a human can still be accurately detected in a standard industrial environment. Due to reflective clothing restrictions (i.e., safety vest, helmet), a higher RSS value is expected when a human is traversing the LED-PD combination.
6. Conclusions and Future
A lab of 4 m × 4 m was equipped with a single ceiling-mounted photodiode and light to experimentally investigate the influence of a human on the reflection pattern in a controlled environment. Our results demonstrated the feasibility of a human sensing system based on visible light.
The influence of the color of a t-shirt is reported. A different colored t-shirt leads to a different RSS pattern, which can help in identifying a person. Coarse localization is possible based on the RSS lapse. It is found that the influence of the human on the RSS value decreases from when increasing the receiver height from 3 to 4 m. A maximum height can thus be found where VLS is still feasible with the current setup.
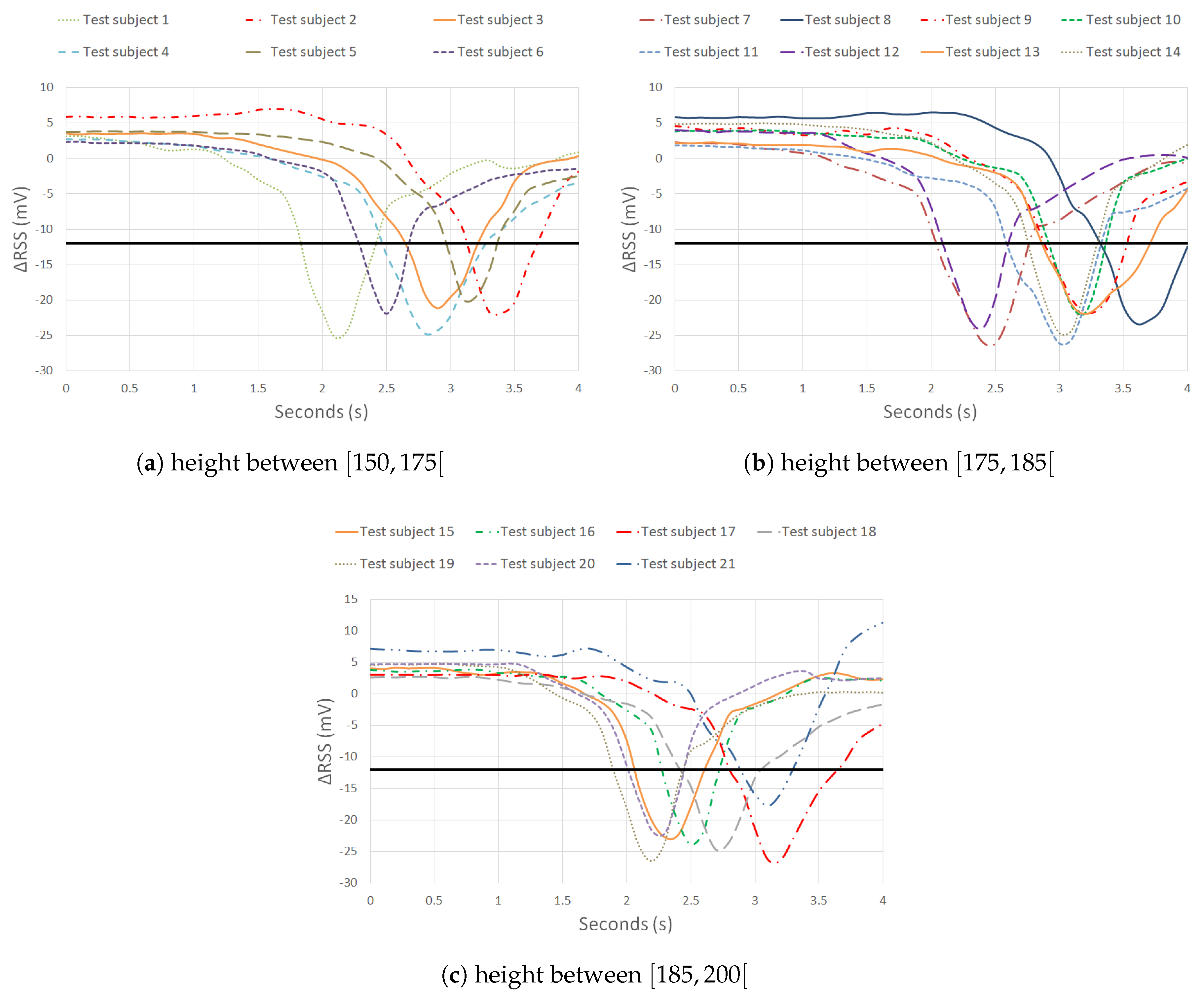
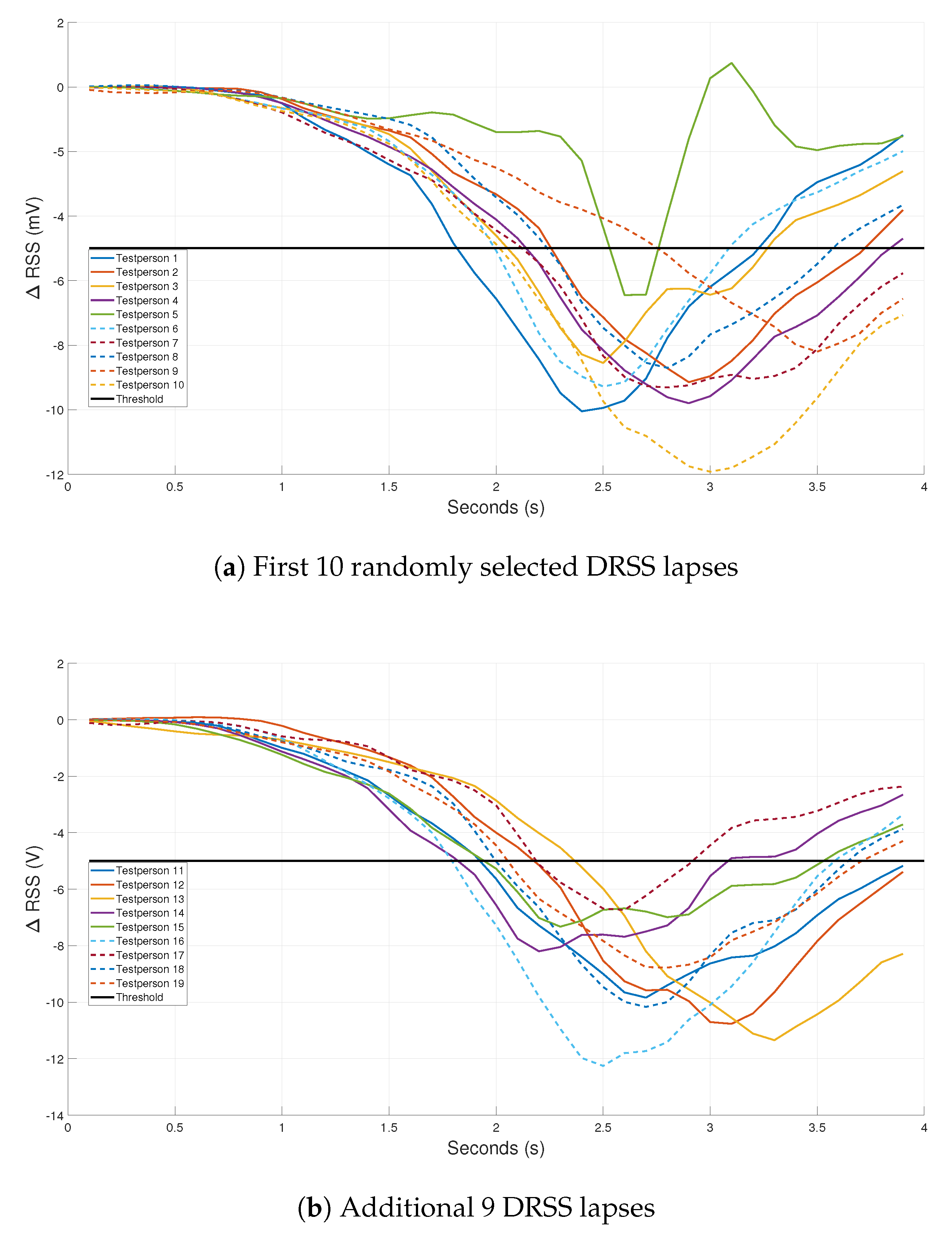
The PD-LED separation changes from 30 cm to 1.5 m to elongate the RSS drop. By elongating the RSS drop, a human pass-by system is easier to create, as the minimum RSS value is lower and the area of the drop is more significant. The human detection system tested in this article achieves a 100% accuracy based on 21 experiments with a LED-PD separation of 1.25 m. In a realistic corridor experiment, an accuracy of 100% is obtained based on 19 experiments. However, the consideration must be made between an accurate detection pass-by system or localization as both require a different setup.
Future work will consist of investigating more environmental parameters (e.g., a different floor, different wall and ambient light) and use this data to construct a real-life setup that can automatically adapt to a new threshold. An algorithm that focuses on the falling and rising of RSS values in a RSS lapse might achieve similar detection rates and is worth investigating. The influence of multiple people passing under the PD at the same time is to be investigated as well. Extending to a multiple light, multiple receivers environment to improve localization is another important research direction.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}