Development of Response Surface Model of Endurance Time and Structural Parameter Optimization for a Tailsitter UAV


Abstract
1. Introduction
2. Materials and Methods
2.1. Structural Design and Parameter Range of the Tailsitter UAV
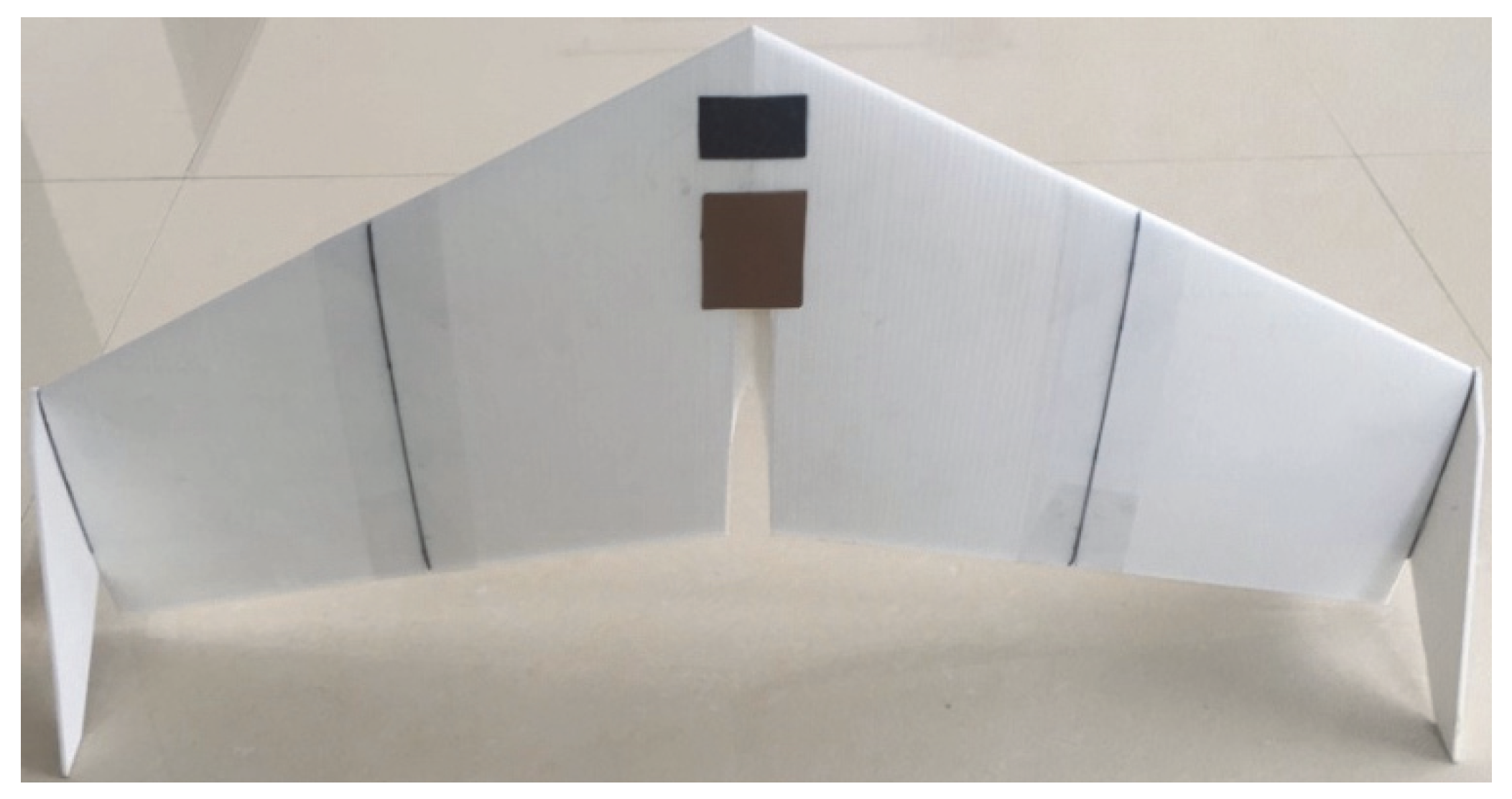
2.1.1. UAV Structure Layout
2.1.2. Structural Parameter Range
2.2. Governing Equations and Numerical Method
2.3. Response Surface Model of Endurance Time
2.3.1. Theoretical Model of Endurance Time
| t—endurance time, s; | Q—battery discharge energy, J; |
| GFA—mass coefficient, s/J; | CFA—aerodynamic coefficient; |
| tFA—time coefficient, s/J; | ρ—air density,1.185kg/m3; |
| s—effective projected area, m2; | G—UAV weight, N; |
| CD—drag coefficient; | CL—lift coefficient. |
2.3.2. Feature Factor Extraction Method
- To calculate the absolute value of the effects;
- To calculate Δ, which is 1.5× the median of the effects in step 1;
- To calculate the median of effects that are less than 2.5 × Δ;
- To calculate the PSE, which is 1.5× the median calculated in step 3.
2.3.3. Endurance Time Response Surface
2.4. Multi-Objective Genetic Algorithm (MOGA)
2.5. CFD Model Validation
2.5.1. Test Materials and Equipment
2.5.2. Test Conditions and Scheme
2.5.3. Numerical Simulation Results Verified
3. Results and Discussion
3.1. Feature Factor Extraction Results
3.2. Effects of the Structural Parameters on the Time Coefficient and Air Resistance
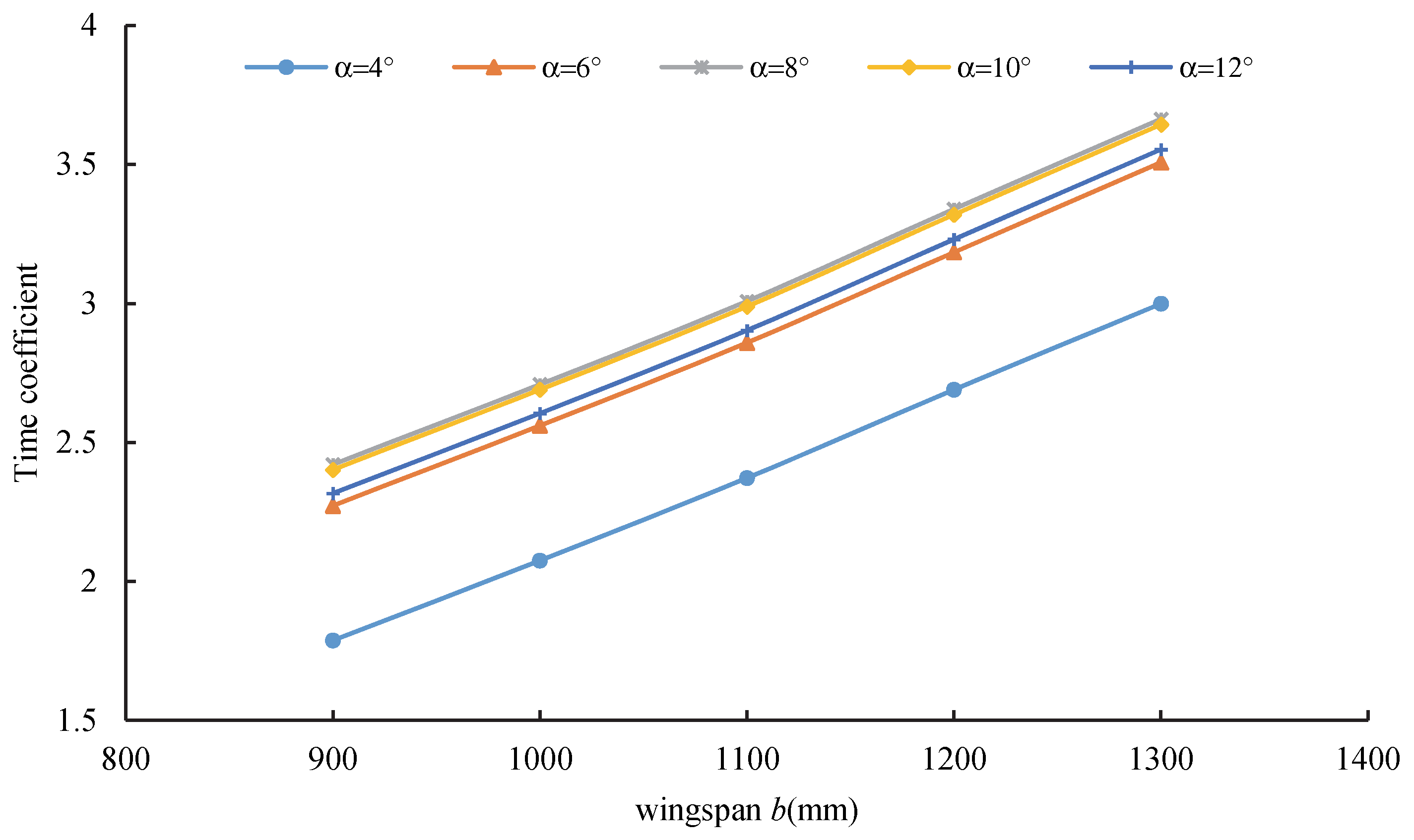
3.2.1. Effects of the Structural Parameters on the Time Coefficient
3.2.2. Effects of the Configuration Parameters on Air Resistance Performance
3.3. Multi-Objective Optimization
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bonadies, S.; Lefcourt, A.; Gadsden, S.A. A survey of unmanned ground vehicles with applications to agricultural and environmental sensing. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping: International Society for Optics and Photonics, Baltimore, MA, USA, 17 May 2016; Volume 9866. [Google Scholar]
- Zhang, C.; Walters, D.; Kovacs, J.M. Applications of low altitude remote sensing in agriculture upon farmers’ requests–a case study in northeastern Ontario, Canada. PLoS ONE 2014, 9, e0112894. [Google Scholar] [CrossRef] [PubMed]
- Santesteban, L.G.; Di Gennaro, S.F.; Herrero-Langreo, A.; Miranda, C.; Royo, J.B.; Matese, A. High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard. Agr. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Ren, D.D.; Tripathi, S.; Li, L.K. Low-cost multispectral imaging for remote sensing of lettuce health. J. Appl. Remote Sens. 2017, 11, 16006. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Saeed, A.S.; Younes, A.B.; Islam, S.; Dias, J.; Seneviratne, L.; Cai, G. A review on the platform design, dynamic modeling and control of hybrid UAVs. In Proceedings of the IEEE 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 806–815. [Google Scholar]
- Hochstenbach, M.; Notteboom, C.; Theys, B.; De Schutter, J. Design and control of an unmanned aerial vehicle for autonomous parcel delivery with transition from vertical take-off to forward flight–vertikul, a quadcopter tailsitter. Int. J. Micro Air Veh. 2015, 7, 395–405. [Google Scholar] [CrossRef]
- Bapst, R.; Ritz, R.; Meier, L.; Pollefeys, M. Design and implementation of an unmanned tail-sitter. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1885–1890. [Google Scholar]
- Liebeck, R.H. Design of the blended wing body subsonic transport. J. Aircraft. 2004, 41, 10–25. [Google Scholar] [CrossRef]
- Li, B.; Zhou, W.; Sun, J.; Wen, C.; Chen, C. Development of model predictive controller for a Tail-Sitter VTOL UAV in hover flight. Sensors 2018, 18, 2859. [Google Scholar] [CrossRef]
- Stone, R.H. The T-wing tail-sitter research UAV. In Proceedings of the 2002 Biennial International Powered Lift Conference and Exhibit, Williamsburg, VA, USA, 5–7 November 2002; p. 5970. [Google Scholar]
- Ang, K.Z.; Cui, J.; Pang, T.; Li, K.; Wang, K.; Ke, Y.; Chen, B.M. Development of an unmanned tail-sitter with reconfigurable wings: U-lion. In Proceedings of the 11th IEEE International Conference on Control & Automation (ICCA), Taichung, Taiwan, 18–20 June 2014; pp. 750–755. [Google Scholar]
- Wang, Y.; Lyu, X.; Gu, H.; Shen, S.; Li, Z.; Zhang, F. Design, implementation and verification of a quadrotor tail-sitter vtol uav. In Proceedings of the IEEE 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 462–471. [Google Scholar]
- Rao, J.; Gao, T.; Ding, W.; Gong, Z. Modeling and flight analyzing of a portable tail-sitter UAV. In Proceedings of the International Conference on Intelligent Unmanned Systems, Singapore, 22 October 2012. [Google Scholar]
- Jiang, Y.; Zhang, B.; Huang, T. CFD study of an annular-ducted fan lift system for VTOL aircraft. Aerospace 2015, 2, 555–580. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Hancer, C.; Oner, K.T.; Sirimoglu, E.; Unel, M. Aerodynamic design and characterization of a quad tilt-wing UAV via wind tunnel tests. J. Aerospace Eng. 2012, 25, 574–587. [Google Scholar] [CrossRef]
- Czyba, R.; Lemanowicz, M.; Gorol, Z.; Kudala, T. Construction prototyping, flight dynamics modeling, and aerodynamic analysis of hybrid VTOL unmanned aircraft. J. Adv. Transp. 2018, 2018, 15. [Google Scholar] [CrossRef]
- Lee, S.; Oh, S.; Choi, S.; Lee, Y.; Park, D. Numerical analysis on aerodynamic performances and characteristics of quad tilt rotor during forward flight. J. Korean Soc. Aeronaut. Space Sci. 2018, 46, 197–209. [Google Scholar]
- Aksugur, M.; Inalhan, G. Design methodology of a hybrid propulsion driven electric powered miniature tailsitter unmanned aerial vehicle. In Proceedings of the Selected papers from the 2nd International Symposium on UAVs, Reno, NV, USA, 8–10 June 2009; pp. 505–529. [Google Scholar]
- Rudrapati, R.; Pal, P.K.; Bandyopadhyay, A. Modeling and optimization of machining parameters in cylindrical grinding process. Int. J. Adv. Manuf. Tech. 2016, 82, 2167–2182. [Google Scholar] [CrossRef]
- Kang, H.S.; Lee, J.M.; Kim, Y.J. Shape optimization of high power centrifugal compressor using multi-objective optimal method. Trans. Korean Soc. Mech. Eng. B 2015, 39, 435–441. [Google Scholar] [CrossRef]
- Che, J.; Tang, S. Research on integrated optimization design of hypersonic cruise vehicle. Aerosp. Sci. Technol. 2008, 12, 567–572. [Google Scholar] [CrossRef]
- Hutagalung, M.; Latif, A.A.; Israr, H.A. Structural design of UAV semi-monoque composite wing. J. Transp. Syst. Eng. 2016, 1, 26–34. [Google Scholar]
- Lee, D.; Gonzalez, L.F.; Periaux, J.; Bugeda, G. Multi-objective design optimization of morphing UAV aerofoil/wing using hybridised MOGA. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Ganguli, R.; Rajagopal, S. Multidisciplinary design optimization of an UAV wing using kriging based multi-objective genetic algorithm. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 17th AIAA/ASME/AHS Adaptive Structures Conference 11th AIAA No, Palm Springs, CA, USA, 4–7 May 2009; p. 2219. [Google Scholar]
- He, Z.; Zhang, J. Response surface methodology fitting using genetic algorithms. Ind. Eng. J. 2005, 6, 77–80. (In Chinese) [Google Scholar]
- Acar, E. Various approaches for constructing an ensemble of metamodels using local measures. Struct. Multidiscip. Optim. 2010, 42, 879–896. [Google Scholar] [CrossRef]
- Zhu, W.; Yu, X.; Wang, Y. Layout optimization for blended wing body aircraft structure. Int. J. Aeronaut. Space Sci. 2019, 20, 879–890. [Google Scholar] [CrossRef]
- Wang, S.; Jian, G.; Xiao, J.; Wen, J.; Zhang, Z. Optimization investigation on configuration parameters of spiral-wound heat exchanger using Genetic Aggregation response surface and Multi-Objective Genetic Algorithm. Appl. Therm. Eng. 2017, 119, 603–609. [Google Scholar] [CrossRef]
- Aksugur, M.; İnalhan, G. Design, build and flight testing of a VTOL tailsitter unmanned aerial vehicle with hybrid propulsion system. In Proceedings of the 6th Ankara International Aerospace Conference, Ankara, Turkey, 14–16 September 2011. [Google Scholar]
- Wang, B.; Hou, Z.; Liu, Z.; Chen, Q.; Zhu, X. Preliminary design of a small unmanned battery powered tailsitter. Int. J. Aerosp. Eng. 2016, 2016, 11. [Google Scholar] [CrossRef]
- Wang, B.; Hou, Z.; Guo, Z.; Gao, X. Space range estimate for battery-powered vertical take-off and landing aircraft. J. Cent. South Univ. 2015, 22, 3338–3346. [Google Scholar]
- Takenaka, K.; Hatanaka, K.; Yamazaki, W. Multidisciplinary design exploration for a winglet. J. Aircr. 2008, 45, 1601–1611. [Google Scholar] [CrossRef]
- Su, X.; Jiang, W.; Zhao, X. Study on the influence of swept angle on the aerodynamic characteristics of the cross-section airfoil of a variable swept-wing aircraft. Iop conference series: Materials science and engineering. IOP Publ. 2019, 685, 12–16. [Google Scholar]
- Weierman, J.; Jacob, J. Winglet design and optimization for UAVs. In Proceedings of the 28th AIAA Applied Aerodynamics Conference, Chicago, IL, USA, 28 June–1 July 2010; p. 4224. [Google Scholar]
- Fu, W.; Zhao, X.; Si, L. Geometric parameters of winglet for the effect on characteristics of the basic wing. Sci. Technol. Eng. 2010, 10, 3378–3383. [Google Scholar]
- Mwenegoha, H.; Moore, T.; Pinchin, J.; Jabbal, M. Model-based autonomous navigation with moment of inertia estimation for unmanned aerial vehicles. Sensors 2019, 19, 2467. [Google Scholar] [CrossRef]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of amphibious vehicle for unmanned mission in water quality monitoring using internet of things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X. Active flow control for supersonic aircraft: A novel hybrid synthetic jet actuator. Sens. Actuators A Phys. 2020, 302, 111770. [Google Scholar] [CrossRef]
- Corrêa, P.; Barcelos, M. Numerical simulation of airfoils applied to UAVS. Rev. Eng. Térmica 2014, 13, 9–12. [Google Scholar] [CrossRef]
- Qian, J.; Jie, S. Aerodynamics analysis on solar car body based on FLUENT. In Proceedings of the World Automation Congress IEEE 2012, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–4. [Google Scholar]
- Narayan, G.; John, B. Effect of winglets induced tip vortex structure on the performance of subsonic wings. Aerosp. Sci. Technol. 2016, 58, 328–340. [Google Scholar] [CrossRef]
- Srinivasa, V.; Sridhara, S.; Nagappa, G.A.; Biradar, B.A. Estimation and reduction of drag in fuselage of solar powered UAV. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–11. [Google Scholar]
- Li, B.; Yang, X.; Wang, S. Simulated Optimization of Small UAV Fuselage for Forest Fire Prevention Based on FLUENT; Journal of Beijing Forestry University: Beijing, China, 2015; p. 14. [Google Scholar]
- Tan, C.X. Adjustment Principle of Model Aircraft; Aviation Industry Press: Beijing, China, 2007; pp. 16–18. (In Chinese) [Google Scholar]
- Montgomery, D.C. Design and Analysis of Experiments; John Wiley & Sons, Inc.: Montgomery, AL, USA, 1976. [Google Scholar]
- Fleiss, J.L. The Design and Analysis of Clinical Experiments. J. Am. Stat. Assoc. 1999, 94, 1384. [Google Scholar]
- Moore, T.R.; Dalva, M. The influence of temperature and water table position on carbon dioxide and methane emissions from laboratory columns of peatland soils. J. Soil Sci. 1993, 44, 651–664. [Google Scholar] [CrossRef]
- Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.; Calafate, C.T.; Manzoni, P. Identifying the key factors affecting warning message dissemination in VANET real urban scenarios. Sensors 2013, 13, 5220–5250. [Google Scholar] [CrossRef] [PubMed]
- Carlson, R.; Carlson, J.E. Chapter 6 Two-level fractional factorial designs. Data Handling in Science and Technology. Elsevier Sci. Technol. 2005, 24, 119–168. [Google Scholar]
- Barros, E.B.C.; Dionísio Machado Filho, L.; Batista, B.G.; Kuehne, B.T.; Peixoto, M.L.M. Fog computing model to orchestrate the consumption and production of energy in microgrids. Sensors 2019, 19, 2642. [Google Scholar] [CrossRef] [PubMed]
- Concepts, R. Statistics for experimenters: An introduction to design, data analysis, and model building. J. Market. Res. 1979, 16, 291. [Google Scholar]
- Ahmadi, M.; Vahabzadeh, F.; Bonakdarpour, B.; Mofarrah, E.; Mehranian, M. Application of the central composite design and response surface methodology to the advanced treatment of olive oil processing wastewater using Fenton’s peroxidation. J. Hazard. Mater. 2005, 123, 187–195. [Google Scholar] [CrossRef]
- Li, H.; Zhai, C.; Weckler, P.; Wang, N.; Yang, S.; Zhang, B. A canopy density model for planar orchard target detection based on ultrasonic sensors. Sensors 2017, 17, 31. [Google Scholar] [CrossRef]
- Domínguez-Renedo, O.; González, M.J.G.; Arcos-Martínez, M.J. Determination of antimony (III) in real samples by anodic stripping voltammetry using a mercury film screen-printed electrode. Sensors 2009, 9, 219–231. [Google Scholar] [CrossRef]
- Idris, A.; Kormin, F.; Noordin, M.Y. Application of response surface methodology in describing the performance of thin film composite membrane. Sep. Purif. Technol. 2006, 49, 271–280. [Google Scholar] [CrossRef]
- Wei, C.X.; Chen, H.D.; Yin, D.Y. Optimization design of cross-spring compliant micro-displacement mechanism based on RSM. Infrared Laser Eng. 2016, 45, 1018005. [Google Scholar] [CrossRef]
- Kong, L.; Sun, Y.; Hu, K.; Liu, Y.; Li, D.; Qiu, Z.; Liu, B. Selections of the cylinder implant neck taper and implant end fillet for optimal biomechanical properties: A three-dimensional finite element analysis. J. Biomech. 2008, 41, 1124–1130. [Google Scholar] [CrossRef]
- Reh, S.; Beley, J.; Mukherjee, S.; Khor, E.H. Probabilistic finite element analysis using ANSYS. Struct. Saf. 2006, 28, 17–43. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Li, J.; Sun, Y.; Wu, K.; Wang, Y. Effect of the die hole structure and distribution on the strength of ring die in pelletizing equipment. In Proceedings of the ASME 2019 International Mechanical Engineering Congress and Exposition: American Society of Mechanical Engineers Digital Collection, Salt Lake City, UT, USA, 8–14 November 2019. [Google Scholar]
- Jovanovic, J.D. Finite Element evaluation and optimization of geometry with DOE. Int. J. Qual. Res. 2011, 2, 4. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product Name | Take-off Mass/kg | Cruise Speed/m·s−1 | Wingspan/mm |
|---|---|---|---|
| senseFly | 0.5 | 12 | 780 |
| senseFly eBee | 0.6 | 11 | 960 |
| Parrot Disco-Pro | 0.7 | 12 | 1150 |
| skywalker X5 | 0.9 | 12 | 1200 |
| cr/mm | ct/mm | b/mm | Λw/(°) | lys/mm | lv/mm | Λv/(°) | h/mm | ljc/mm |
|---|---|---|---|---|---|---|---|---|
| 240~500 | 150~300 | 800~1200 | 0~60 | 100~130 | 30~60 | 30~60 | 5~25 | 70~150 |
| Parameters | Original Prototype | Optimal Point 1 | Validate 1 | Optimal Point 2 | Validate 2 | Optimal Point 3 | Validate 3 |
|---|---|---|---|---|---|---|---|
| root chord/mm | 400 | 314.7 | 316.6 | 308.1 | |||
| wingtip chord/mm | 240 | 181.5 | 184.3 | 186.5 | |||
| wingspan/mm | 1000 | 1197.8 | 1147.2 | 1037.9 | |||
| sweep angle/(°) | 25 | 15.9 | 32.7 | 31.1 | |||
| endurance time*100 | 2.72 | 3.25 | 3.19 | 2.99 | 2.91 | 2.66 | 2.60 |
| Predicted and relative error/% | 19.5 | 1.88 | 9.93 | 2.75 | 2.21 | 2.34 | |
| air resistance/N | 0.69 | 0.45 | 0.46 | 0.40 | 0.42 | 0.38 | 0.39 |
| Predicted and relative error/% | 34.78 | 2.17 | 42.02 | 4.76 | 44.93 | 2.56 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, X.; Liu, W.; Han, W.; Li, G.; Ma, Q. Development of Response Surface Model of Endurance Time and Structural Parameter Optimization for a Tailsitter UAV. Sensors 2020, 20, 1766. https://doi.org/10.3390/s20061766
Yao X, Liu W, Han W, Li G, Ma Q. Development of Response Surface Model of Endurance Time and Structural Parameter Optimization for a Tailsitter UAV. Sensors. 2020; 20(6):1766. https://doi.org/10.3390/s20061766
Chicago/Turabian StyleYao, Xiaomin, Wenshuai Liu, Wenting Han, Guang Li, and Qian Ma. 2020. "Development of Response Surface Model of Endurance Time and Structural Parameter Optimization for a Tailsitter UAV" Sensors 20, no. 6: 1766. https://doi.org/10.3390/s20061766
APA StyleYao, X., Liu, W., Han, W., Li, G., & Ma, Q. (2020). Development of Response Surface Model of Endurance Time and Structural Parameter Optimization for a Tailsitter UAV. Sensors, 20(6), 1766. https://doi.org/10.3390/s20061766