Joint Tracking and Classification of Multiple Targets with Scattering Center Model and CBMeMBer Filter †


Abstract
1. Introduction
2. Background
2.1. System Model
2.1.1. Target Motion Model
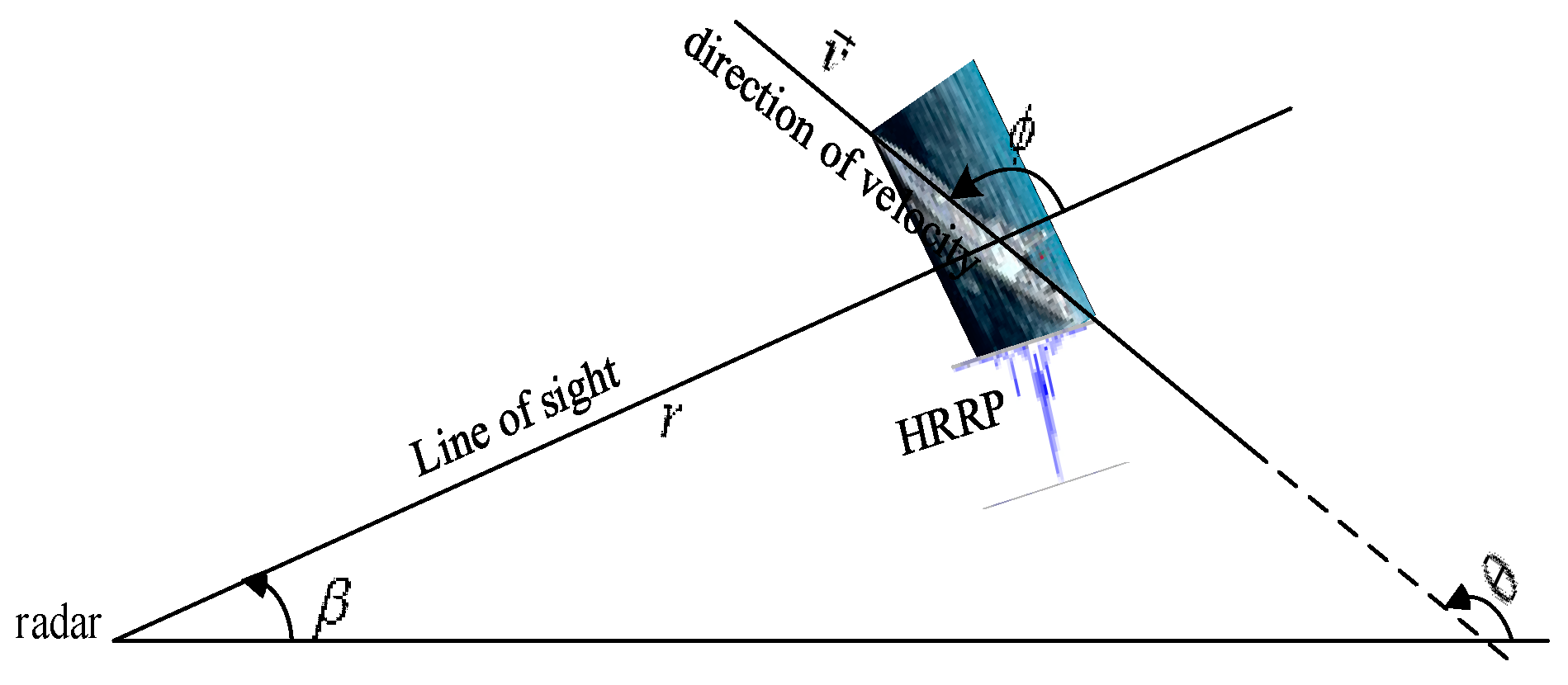
2.1.2. Sensor Observation Model
2.2. CBMeMBer Filter
2.2.1. Prediction Step
2.2.2. Update Step
3. JTC Method Based on SCM and CBMeMBer Filter
3.1. SCM-Based JTC Method: Single-Target Case
| Algorithm 1 Single-time step recursion of the scattering center model (SCM)-based joint tracking and classification (JTC) method |
|
3.2. SCM-JTC-CBMeMBer Filter: Multi-Target Case
4. SMC Implementation of the SCM-JTC-CBMeMBer Filter
5. Simulation Results
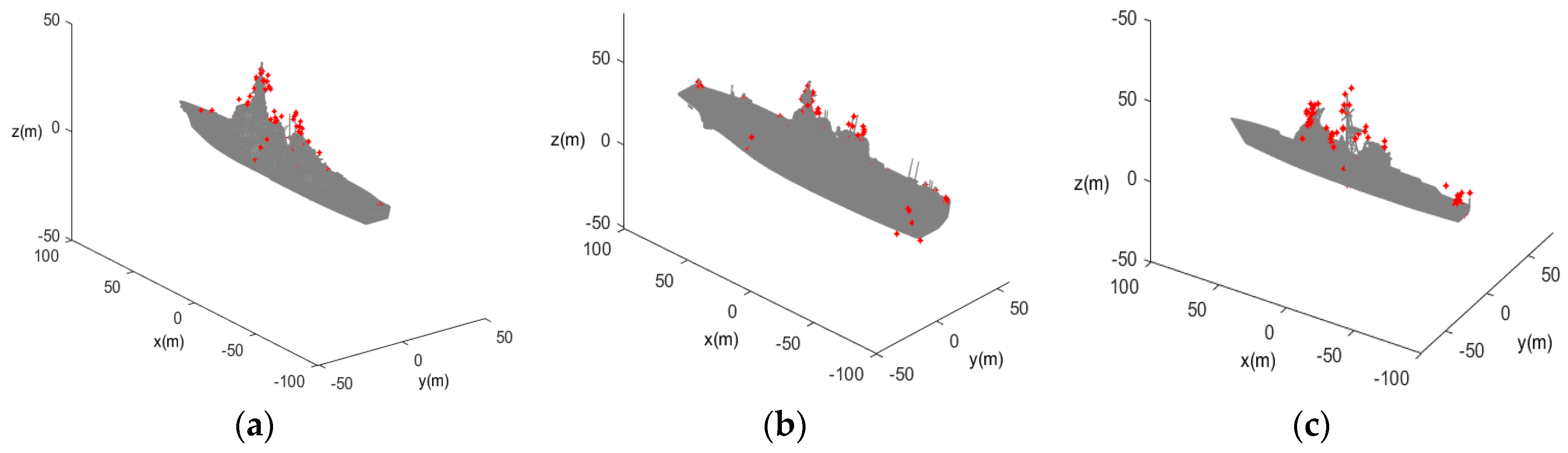
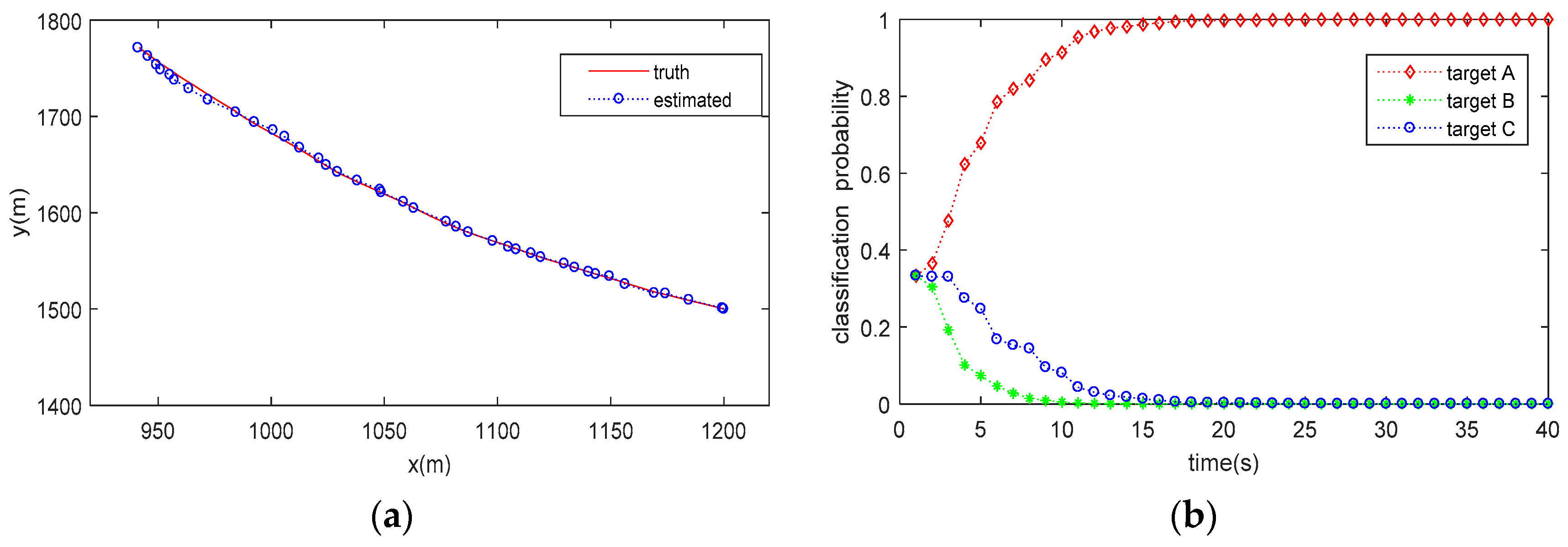
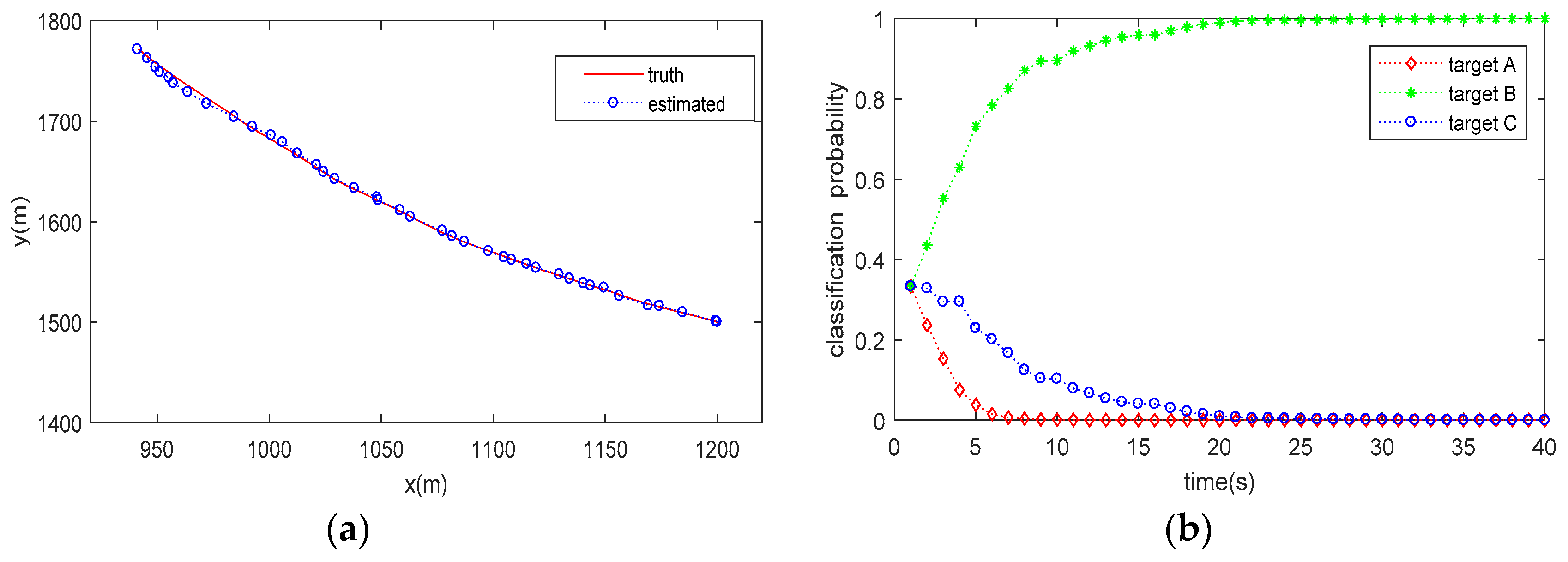
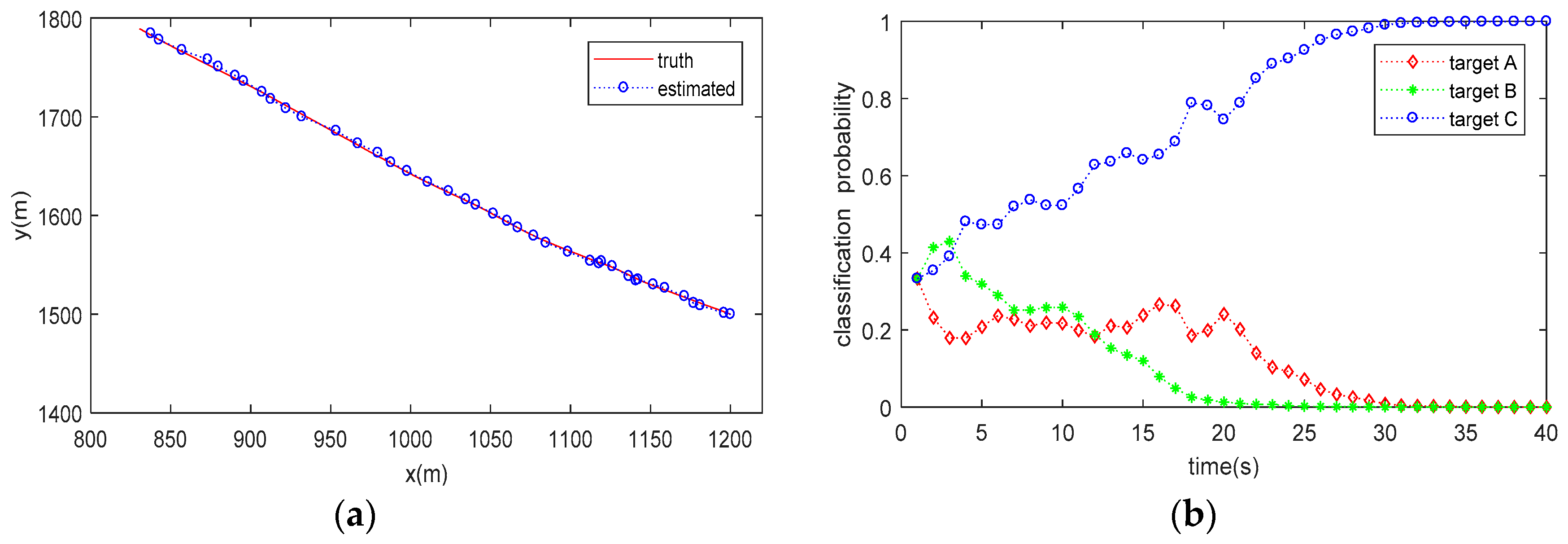
5.1. SCM-Based JTC Method
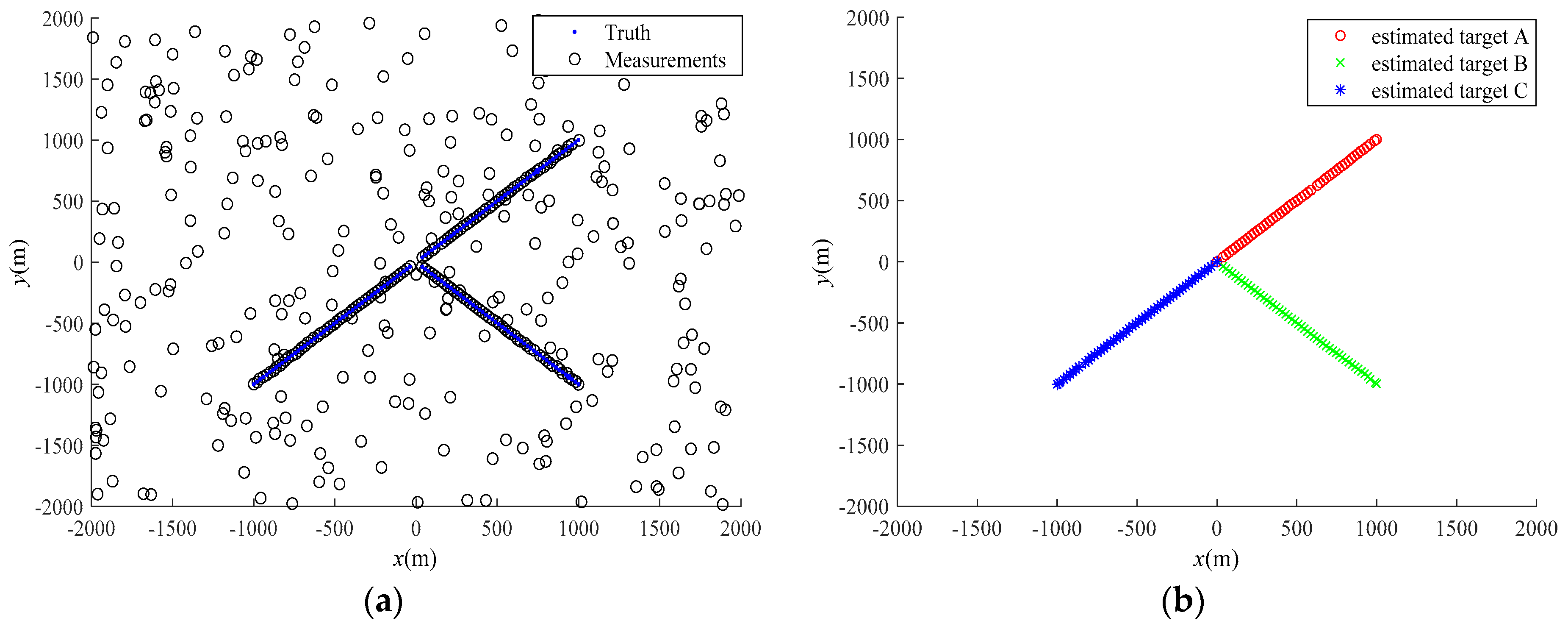
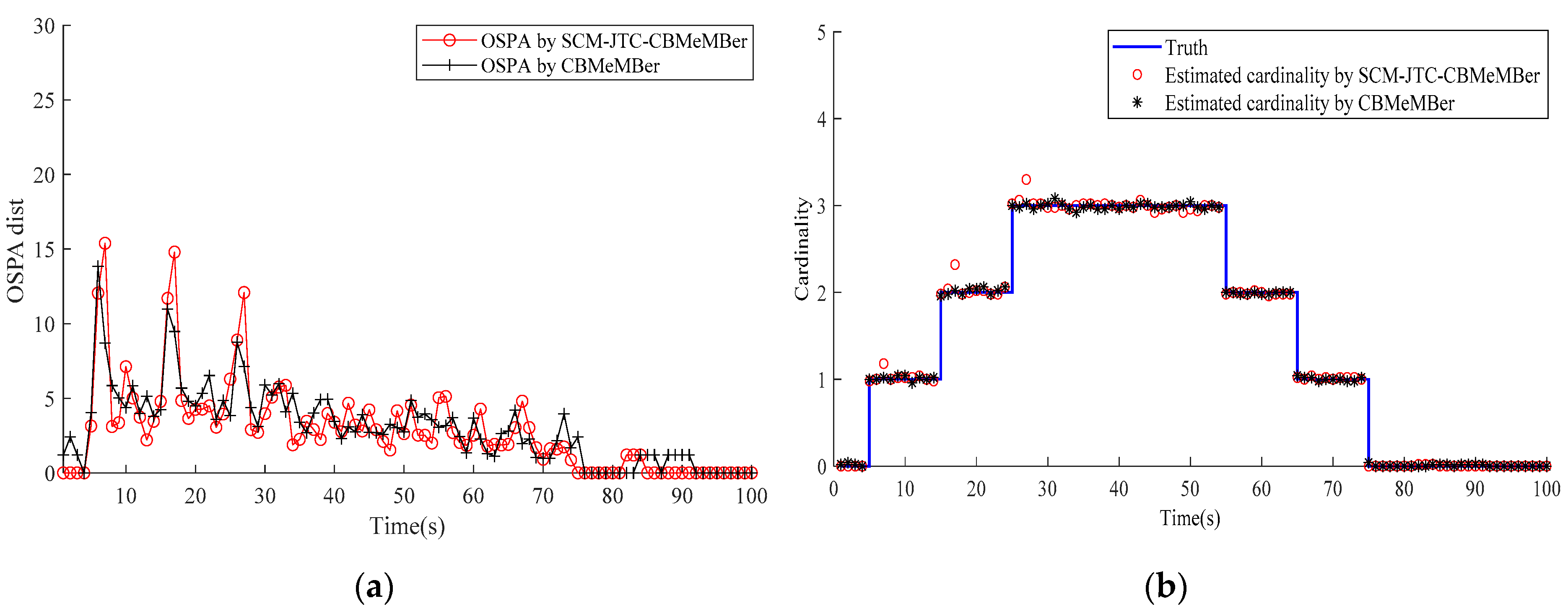
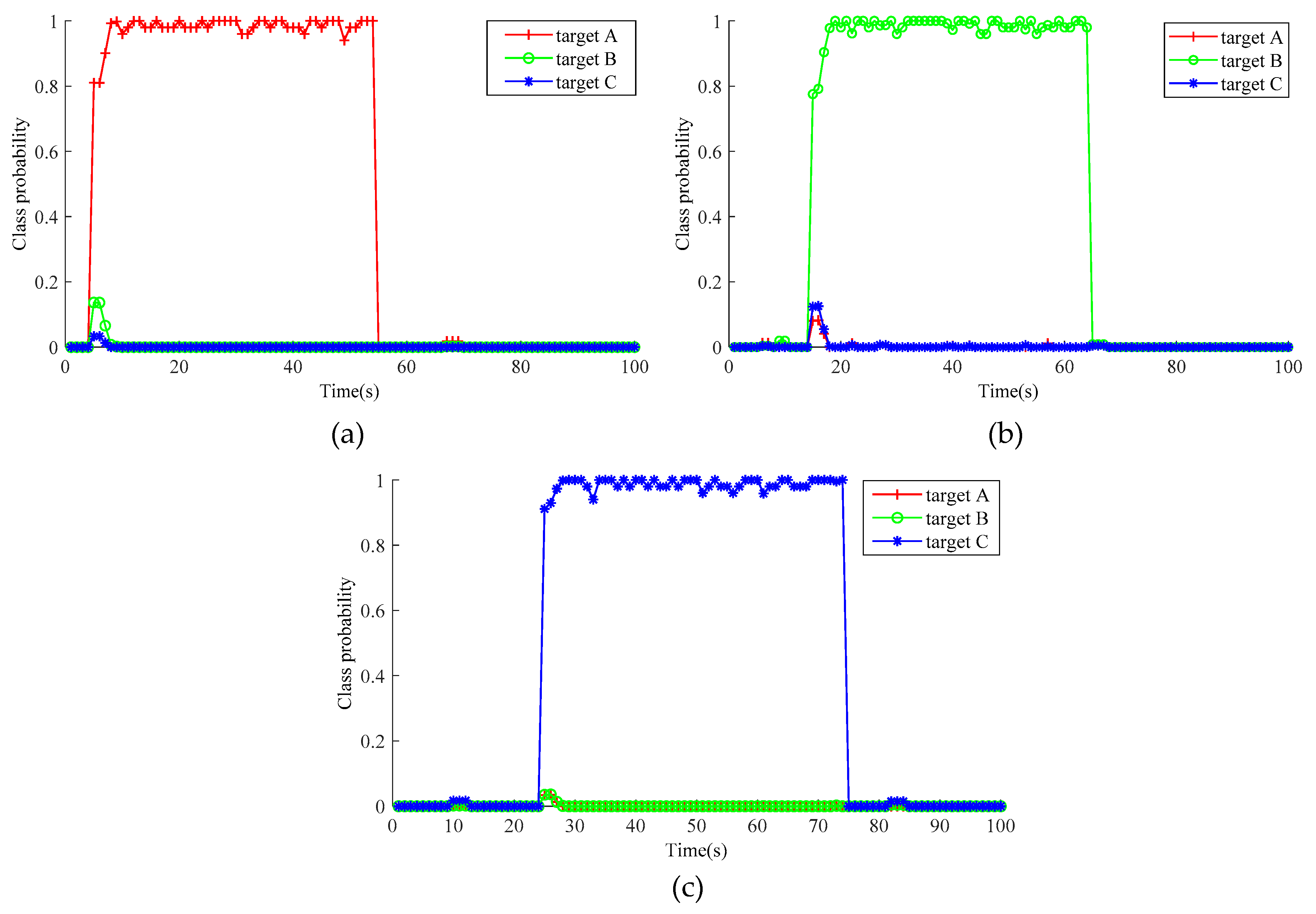
5.2. SCM-JTC-CBMeMBer Filter
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
References
- Ristic, B.; Smets, P. Target classification approach based on the belief function theory. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 574–583. [Google Scholar] [CrossRef]
- Challa, S.; Pulford, G.W. Joint target tracking and classification using radar and ESM sensors. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1039–1055. [Google Scholar] [CrossRef]
- Maskell, S. Joint tracking of manoeuring targets and classification of their manoeurability. EURASIP J. Appl. Signal Process. 2014, 15, 2339–2350. [Google Scholar]
- Farina, A.; Lombardo, P.; Marsella, M. Joint tracking and identification algorithms for multisensor data. IEE Pro.-Radar Sonar Navig. 2002, 149, 271–280. [Google Scholar] [CrossRef]
- Donka, A.; Lyudmila, M. Joint target tracking and classification with particle filtering and mixture Kalman filtering using kinematic radar. Digit. Signal Process. 2006, 16, 180–204. [Google Scholar]
- Magnant, C.; Giremus, A.; Grivel, E.; Ratton, L.; Joseph, B. Joint tracking and classification based on kinematic and target extent measurements. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 1748–1755. [Google Scholar]
- Magnant, C.; Kemkemian, S.; Zimmer, L. Joint tracking and classification for extended targets in maritime surveillance. In Proceedings of the IEEE Radar Conference, Oklahoma City, OK, USA, 23–27 April 2018; pp. 1117–1122. [Google Scholar]
- Lan, J.; Li, X.R. Joint tracking and classification of extended object using random matrix. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1550–1557. [Google Scholar]
- Minvielle, P.; Doucet, A.; Marrs, A.; Maskell, S. A Bayesian approach to joint tracking and identification of geometric shapes in video sequences. Image Vis. Comput. 2010, 28, 111–123. [Google Scholar] [CrossRef]
- Gong, J.L.; Fan, G.L.; Yu, L.J.; Havlicek, J.P.; Chen, D.R.; Fan, N.J. Joint view-identity manifold for infrared target tracking and recognition. Comput. Vis. Image Underst. 2014, 118, 211–224. [Google Scholar] [CrossRef]
- Ma, C.H.; Wen, G.J.; Ding, B.Y.; Zhong, J.R.; Yang, X.L. Three-dimensional electromagnetic model–based scattering center matching method for synthetic aperture radar automatic target recognition by combining spatial and attributed information. J. Appl. Remote Sens. 2016, 10, 016025. [Google Scholar] [CrossRef]
- Ding, B.Y.; Wen, G.J. Target reconstruction based on 3-D scattering center model for robust SAR ATR. IEEE Trans on Geosci. Remote. 2018, 56, 3772–3785. [Google Scholar] [CrossRef]
- Hu, J.M.; Wang, W.; Zhai, Q.L.; Ou, J.P.; Zhan, R.H.; Zhang, J. Global scattering center extraction for radar targets using a modified RANSAC method. IEEE Trans. Antenn. Propag. 2016, 64, 3573–3586. [Google Scholar] [CrossRef]
- Zhan, R.H.; Wang, L.P.; Zhang, J. Joint target tracking and classification with scattering center model for radar sensor. In Proceedings of the 2019 International Conference on Control Automation and Information Sciences (ICCAIS), Chengdu, China, 23–26 October 2019; pp. 1–5. [Google Scholar]
- Barshalom, Y. Multitarget-Multisensor Tracking: Applications and Advances; Artech House: Norwood, MA, USA, 1992. [Google Scholar]
- Musicki, D.; Evans, R. Joint integrated probabilistic data association: JIPDA. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1093–1099. [Google Scholar] [CrossRef]
- Reid, D. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Mahler, R. Statiscal Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Mahler, R. Advances in Statiscal Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2014. [Google Scholar]
- Mahler, R. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The cardinality balanced multitarget multi-Bernoulli filter and its implementations. IEEE Trans. Signal Proces. 2009, 57, 409–423. [Google Scholar]
- Reuter, S.; Vo, B.-T.; Vo, B.-N.; Dietmayer, K. The labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Vo, B.N.; Vo, B.T.; Pham, N.T.; Suter, D. Joint detection and estimation of multiple objects from image observations. IEEE Trans. Signal Process. 2010, 58, 5129–5141. [Google Scholar] [CrossRef]
- Fu, Z.Y.; Angelini, F.; Chambers, J.; Naqvi, S.M. Multi-level cooperative fusion of GM-PHD filters for online multiple human tracking. IEEE Trans. Multimedia. 2019, 21, 2277–2291. [Google Scholar] [CrossRef]
- LI, T.C.; Juan, M.C.; Sun, S.D. Partial consensus and conservative fusion of Gaussian mixtures for distributed PHD fusion. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2150–2163. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Beard, M. Multi-sensor multi-object tracking with the generalized labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2019, 67, 5952–5967. [Google Scholar] [CrossRef]
- Yi, W.; Li, S.Q.; Wang, B.L.; Hoseinnezhad, R.; Kong, L.J. Computationally efficient distributed multi-sensor fusion with multi-Bernoulli filter. IEEE Trans. Signal Process. 2020, 68, 241–256. [Google Scholar] [CrossRef]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for Bayesian multi-target filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Vo, B.N.; Ma, W.K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Proces. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Proces. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.T.; Vo, B.N.; Farina, A. A tutorial on Bernoulli filters: theory, implementation and applications. IEEE Trans. Signal Proces. 2013, 61, 3406–3430. [Google Scholar] [CrossRef]
- Arulampalam, S.; Maskell, S.; Gordan, N.; Gordon, N.; Clapp, T. A tutorial on particle filter for on-line nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| True Target Class | Classified Results | PCC | ||
|---|---|---|---|---|
| Ship A | Ship B | Ship C | ||
| Ship A | 1294 | 58 | 99 | 0.8986 |
| Ship B | 77 | 1295 | 129 | 0.8993 |
| Ship C | 69 | 87 | 1212 | 0.8417 |
| OA-PCC | 0.8799 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, R.; Wang, L.; Zhang, J. Joint Tracking and Classification of Multiple Targets with Scattering Center Model and CBMeMBer Filter. Sensors 2020, 20, 1679. https://doi.org/10.3390/s20061679
Zhan R, Wang L, Zhang J. Joint Tracking and Classification of Multiple Targets with Scattering Center Model and CBMeMBer Filter. Sensors. 2020; 20(6):1679. https://doi.org/10.3390/s20061679
Chicago/Turabian StyleZhan, Ronghui, Liping Wang, and Jun Zhang. 2020. "Joint Tracking and Classification of Multiple Targets with Scattering Center Model and CBMeMBer Filter" Sensors 20, no. 6: 1679. https://doi.org/10.3390/s20061679
APA StyleZhan, R., Wang, L., & Zhang, J. (2020). Joint Tracking and Classification of Multiple Targets with Scattering Center Model and CBMeMBer Filter. Sensors, 20(6), 1679. https://doi.org/10.3390/s20061679