1. Introduction
According to MOOG Aircraft Group, one of the biggest airplane component-makers in the world, over 66% of airport emergencies are related to foreign object debris (FOD) on runways [
1]. Urgent requirements for reliable FOD inspection have been indicated to the aviation industry.
Among applied systems, radars perform better than electro-optical devices especially in inclement conditions [
1,
2]. Existing systems (such as Tarsier [
1], operating in 94.5GHz) have shown that microwave radars can provide high resolutions to defense metal, stones, concrete, or even plastics with small radar cross-section (RCS) on runways and air operations area (AOA) surfaces [
3] (pp. 5–6). Moreover, some other high-resolution radars have been successively developed and testified by simulations and outfield experiments, operating around wide-range single frequencies (e.g., 76.5 GHz [
4], 77 GHz [
5,
6], 78 GHz [
7], and 96 GHz [
2]). In Ref. [
8], a multi-frequency study was presented, focusing both on the comparative measurement of asphalt clutter and on the RCS of typical FOD targets across a wide spectral band [
8].
High-resolution radars have become the primary sensors of airport surveillance [
9,
10]. In conjunction with other types of sensors to provide an integrated data fusion, advanced surface movement guidance and control systems (A-SMGCSs) have been developed [
11], as the most advanced AOA control concept in the world [
12]. With the sustained technical support of manufacturer (such as THALES Group in [
13]), A-SMGCSs keep providing controllers with improved situational awareness, to enhance surface airport movement and enable advanced tower cab functionality.
Radar-based FOD surveillance is always challenged by heavy land clutter in practice, thus constant false alarm rate (CFAR) algorithms possess the potential to support anti-FOD radars.
There are two common methods of implementing CFAR:
In the first method, the detector outputs are calculated by proper background estimation, such as cell-averaging (CA) [
14,
15,
16], the greatest or smallest option (GO or SO) [
17], ordered statistic (OS) [
18,
19], from nearby cells only in space domain. Such procedures may suffer from spatial heterogeneity, leading to poor detection probability or excessive false alarms. Hence some methods [
20,
21,
22] with robustness were proposed, but further improvements are still required. Recent investigations [
23,
24] focus on detectability improvement to the low-altitude, slow-speed, small targets, considering complex heterogeneous background, which aims at real applications.
Another is known as clutter-map (CM) technique [
25,
26], which exploits temporal stationarity of clutter background rather than in spatial domain. In detail, the estimation of the background power (or amplitude) is obtained by averaging previous returns of each map cell in some certain manner. However, the performance will degrade when targets enter the resolution cells or persist during several scanning periods. To reduce target self-masking [
27,
28] and false alarms [
28], improvements have been put forward under the Gaussian [
27,
29] or various non-Gaussian background (e.g., exponentially distributed clutter [
27], log-normal clutter [
28], K-distributed clutter [
30], and Weibull clutter [
31]).
In many cases, a single CFAR processors can hardly meet the complex radar operation environment. Thus, the concept of variability indexes (VIs) were introduced, to account for both homogeneous and heterogeneous clutters. It performs intelligent detection using composite approach, based on four basis CFARs (CA-, SO-, GO- and OS-CFAR) [
32,
33,
34].
In recent years, CFAR methods have been involved in radar-based FOD detection. Ref. [
35] provided the theoretical basis for CFAR engineering application against FOD. In [
36], the authors proposed two former detection information- (FDI-) CFARs. The performance outperformed in homogeneous or partially homogeneous clutter than in heterogeneous conditions, which exposed the detection challenge brought by topography discontinuity. The plane technique of CM-CFAR was first introduced for FOD detection in [
37]. It was validated in relatively low signal-to-clutter ratio (SCR) situation, such as AOA surfaces in airport. Aiming at multi-FOD, the authors in [
38] proposed a Trimmed-Mean CM-CFAR method based on OS. Several of the large samples in a reference window were trimmed to tolerate interfering targets. By employing feature extraction and support vector domain description, experimental results showed that it could not only detect but also classify foreign items and false alarms [
39].
For practical application, improvements with robustness are still required, especially when various scattering surfaces are involved. Giving full consideration to the complex clutter background in AOA scenes, a hybrid method based on CA-CM-CFAR is proposed in this paper. In addition, we also present experimental results acquired at 78.5GHz in a pavement scenario. Compared to previous work, the contributions of our work are summarized as follows:
The clutter edges caused by background discontinuities, which may impede the traditional CFAR performance is first being considered. In previous research [
35,
36,
37,
38,
39], scenarios of homogeneous runway were considered most commonly.
According to VIs, we modify the threshold near clutter edges, bringing convenience to acquire threshold. Moreover, it is decoupled with the scene knowledge.
The feasibility for MMW radar is verified by an experimental system.
The rest of this paper contains four main sections. In
Section 2, the theoretical background is introduced.
Section 3 addresses the adaptive method based on the CA-CM-CFAR, in homogeneous or clutter edge conditions. Accordingly, the evaluation indexes of performance are proposed. In
Section 4, the experiment set-up at 78.5 GHz is described. Finally, conclusions are drawn according to the experiment results in
Section 5.
2. Theoretical Basis
In this section, the basic theory about CA-CM-CFAR and VIs are introduced. The CM, where the runway and side lawns are covered, is depicted according to a typical AOA scene. Compared with the Nitzberg CM-CFAR, another CFAR involving adjacent map cells in background estimation is introduced. Moreover, VIs are computed to indicate current clutter background within the reference window, which play as the basis of threshold selection.
2.1. Map Cell Division
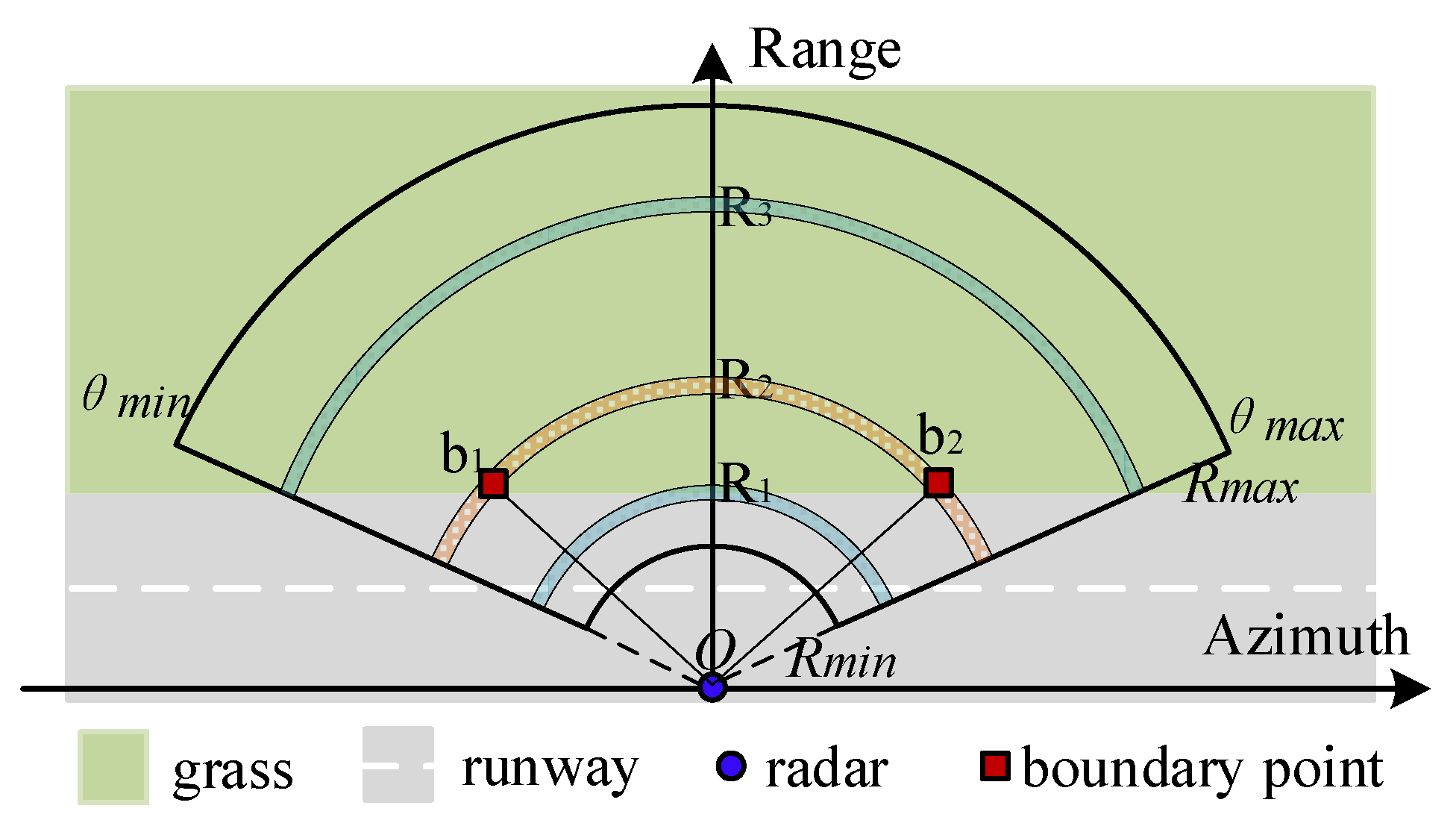
As in
Figure 1, a side-looking radar is equipped on a rotary platform and scanning:
Two terrain surfaces, lawns and runways, are involved. The antenna energy is concentrated within the main beam whose width is in azimuth. With the beam scanning, the radar coverage is limited from to in range, and from to in azimuth. Thus, the background is divided into resolution cells sized . indicates the projected . The clutter level of each cell (intensity or amplitude) is saved in matrix form, known as the static CM. With one-by-one scanning, the CM is updating at an efficiency. In general cases, the efficiency is control within (0,1).
2.2. CA-CM-CFAR
Classical CM-CFAR algorithms are investigated in temporal domain. The fluctuant CM of each scanning is levelling off to the theoretical scattering power with the increasing of iteration times. There are two CM-CFAR techniques according to different estimations of clutter level at cell under test (CUT).
One is known as the Nitzberg technique [
25] (see
Figure 2a), or ‘point’ technique of CM-CFAR, which means only CUT clutter power is involved. The background estimation is acquired by averaging previous clutter power in CUT, at an iteration rate of
.
Another is known as the plane technique [
27,
29]. The spatial samples from a bunch of map cells are grouped in a reference window, and iteratively filtered on a scan-by-scan basis, under an assumption of clutter model. As
Figure 2b shows, a reference window sized
(
,
are required to be odd and no less than 3) is sliding on the CM, where
guard units (also known as the protection units) are contained to prevent power spread of the extended targets. Thus, there are
map cells involved in background estimating.
The CM-CFAR with plane technique is employed in this paper for FOD indication, due to higher detection probability than Nitzberg CM-CFARs, under the same SCR condition and false alarm requirement [
40] (pp. 29–30). The CUT background is achieved by CA; thus, it is mentioned as CA-CM-CFAR in the later sections.
2.3. VI Indicator
VIs could describe current clutter conditions dynamically under complex background, which are commonly used as indicators to select CFAR method (e.g., CA, SO, GO or OS) adaptively.
Take a reference window sized
(
and
denote the resolutions) as the example,
guard units are removed from the VI calculation. First, we divide the reference window into two pairs of equal halves (as
Figure 3) in range and azimuth, respectively. Hence a Gaussian statistic
with mean
and variance
, is introduced to denote the clutter background at
nth scanning, where
and
indicate the range and azimuth positions on the CM. To achieve relatively stable clutter levels,
integrations are carried out. The integrated result is expressed as another Gaussian statistic
, satisfying
. Calculate the ratio between leading and lagging reference halves, the range VI is expressed by
:
Similarly, the azimuthal VI
is computed as
Both
and
are obtained by the clutter level ratio between reference halves. In general, the lawn clutter levels are much higher than runway especially in low-grazing conditions. It is easy to find that:
and
will be kept around zero in the cases of homogeneous reference windows (only grass or runway surface is involved), whereas the non-zero VIs demonstrate the presence of background discontinuities in the leading or lagging half. Considering about clutter fluctuation in practice, the VI conditions are relaxed as in
Table 1:
Please note that the limitations and are required small and positive.
3. CFAR-Based Detector
As
Figure 4 demonstrates, three range gates are taken as the examples, named
to
. The ground clutter is believed homogeneous at those range gates, which are closer than
or further than
, because only the concrete/asphalt runway or lawn surface is involved. As for the others, more surface conditions must be taken into account, which brings sharp clutter changes at the terrain boundaries (indicated by
and
, located at range gate
).
A CFAR-based detector is presented in this section which adaptively selects threshold according to the VI conditions. In addition, the indexes of performance evaluation are given.
3.1. Homogeneous Clutter Conditions
The clutter levels are assumed to have statistically independent and identical distribution (IID) within a uniform reference window. When IID is satisfied, the clutter mean and variance are generally estimated based on their statistical properties (probability densities are the most commonly used). At
nth scanning, we first estimate the mean
and variance
of clutter amplitude at
CUT as
subjects to Gaussian distribution with variance
and mean
while
obeys a modified Chi-square distribution with
degrees of freedom (DOFs) (the deductions are given in
Appendix A), which are expressed as
With one-by-one scanning,
and
are updating at
. This procedure is realized in the form of iterative filter. Suppose
and
play the filter output, both statistics are generated by previous
and
. Such expressions are obtained:
Equations above are initialized by
and
.
and
share similar distributions to
and
(according to the details in
Appendix A). Referring to (4a) and (4b), we introduce
to simplify the statistical models:
Thus, the decisions are deduced as (7a) and (7b), where
indicates the detection threshold.
(or
) denotes the presence (or absence) of targets. In fact, the test statistic can be improved by combining (7a) and (7b). Thus,
is put forward as the test statistics based on the difference between
and
(both are Gaussian):
The false alarm rate
is decided by
where
indicates the probability density function (PDF) of
.
represents the cumulative distribution function (CDF) of
. Meanwhile, the multiple integration in (9) is hard to solve in an analytical form, consisting of the Chi-square PDF
and Normal CDF
.
Referring to (4a) and (6a), we can get the following conclusion:
Therefore, we introduce a statistic
:
obeys the Student-t distribution with
DOFs, where
. Thereupon the threshold
should be modified as
Thus, (9) can be rewritten as
where
indicates the t distribution PDF with a CDF
.
is strictly constant and independent of the clutter level. Thereupon, it is convenient to solve
as
when
keeps constant.
is the inverse function of
.
3.2. Clutter Edge Conditions
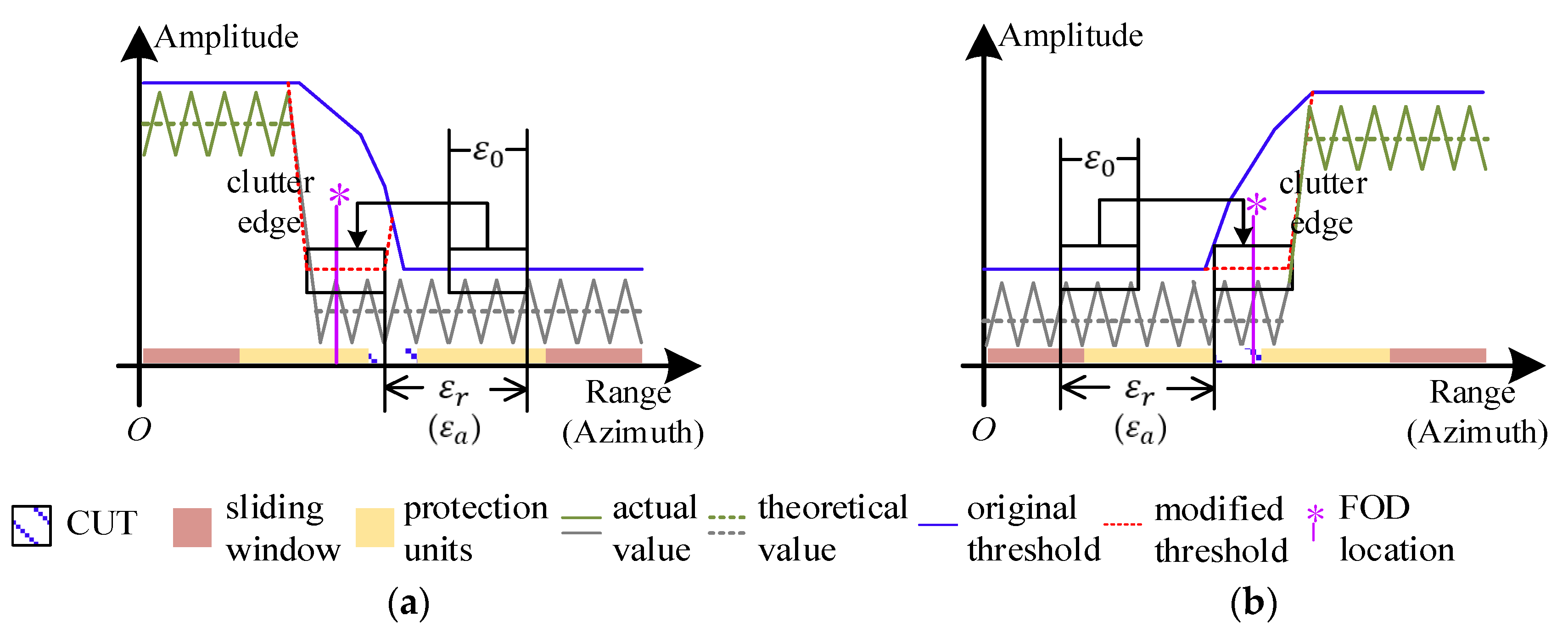
Targets with small RCSs may be masked by the inflated threshold near background discontinuities. The performance of CA-CFAR detectors would deteriorate in these cases. Thus, a threshold modification is proposed as shown in
Figure 5:
The clutter echoes are signified by green and gray lines fluctuating around the theoretical level (denoted by the corresponding dotted lines). A FOD target near the clutter edge (where or ) is veiled by the threshold of CA-CFAR (represented by the blue lines), thus we introduce (or ) in range (or azimuth) domain to indicate the shift distance (in the direction from grass surface to runway) where the -length threshold is intercepted, to replace the counterpart on the runway side. Hence the modified threshold is highlighted by red. To sum up, is lowered for better detectability around the terrain discontinuities.
3.3. Performance Evaluation
The detection probability
is used to evaluate CA-CM-CFAR in homogeneous clutter:
, , where denotes the SCR after K noncoherent integrations.
Around the clutter edges,
is modified to
according to current VIs, which suggests that
is difficult to solve, due to the complex clutter is hard to be depicted by any analytical CDF. Therefore, we present the indicator
as
to evaluate the improvement of detectability, which is required by a smallest detectable target.
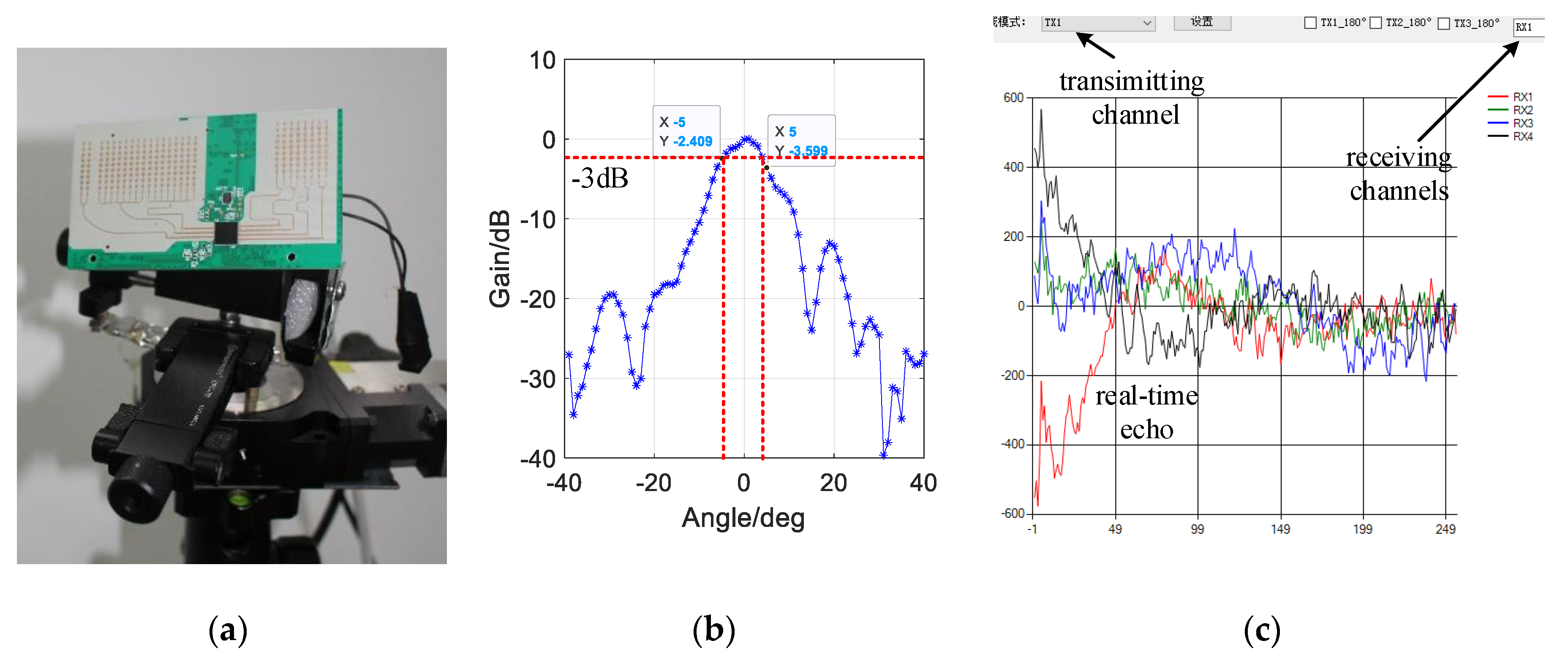
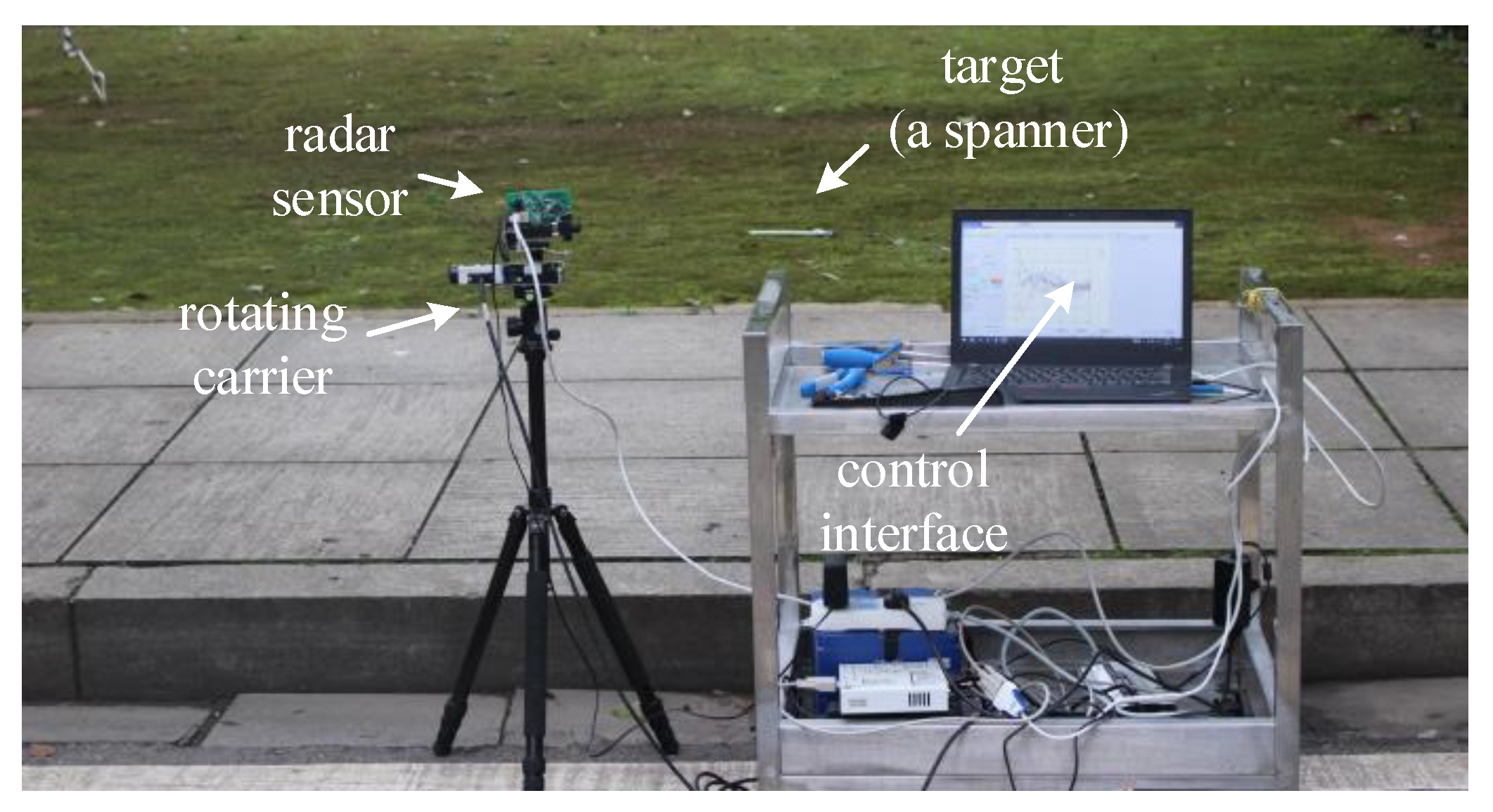
5. Results and Discussion
To validate the detection method above, three experiments are carried out at 78.5 GHz. In Experiment 1, two objects are considered on the homogeneous background. As for Experiment 2 and 3, three and four targets are involved respectively, some are masked near the clutter edges. The detection results are given and discussed, against the target masking.
Table 3 provides some conditions of this hybrid CFAR:
There are some other details to clarify: the real-time echo is processed by two-dimension FFT with 128 bins in range-azimuth domain, thus the theoretical radar coverage is from 0.1 m to 12.8 m. Hanning window is used in FFT processing.
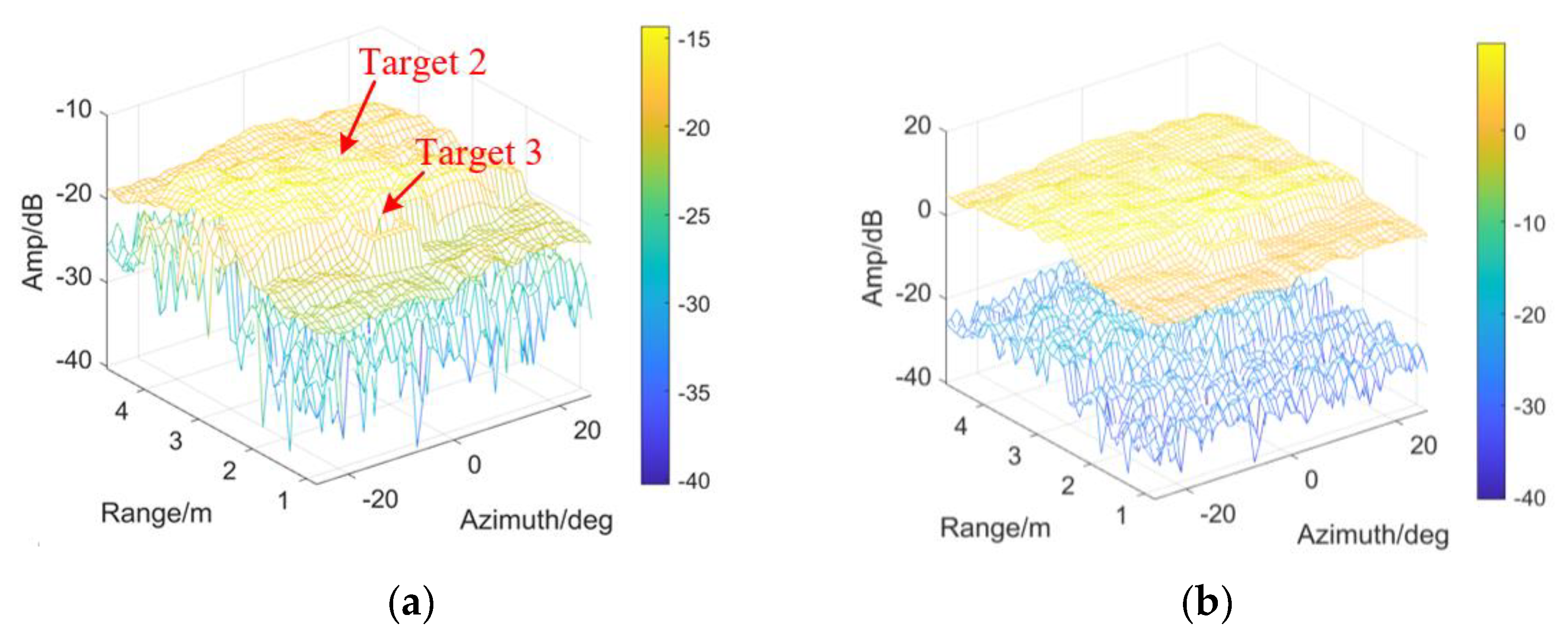
There are two objects, Target 2 (the screwdriver) on the grassland and 3 (the string of keys) on the concrete pavement are concerned in this experiment. See
Table 4, the listed positions indicate their geometric centers.
As widely known, student-t models approximate Gaussian distributions mathematically with DOF increasing. The outputs of CFAR processor by the student-t test statistics are shown in
Figure 9a, compared with the Normal statistics in
Figure 9b. Both objects are missed by the Normal threshold, which demonstrates that the test statistics can be hardly depicted by Gaussian distribution.
Figure 10 presents the result in
Figure 9a from the perspective of the indicated target positions, range, and azimuth included. Both objects are detected agrees with the real positions. Such a conclusion is drawn, the proposed CFAR works to those targets with larger RCSs, in the uniform background.
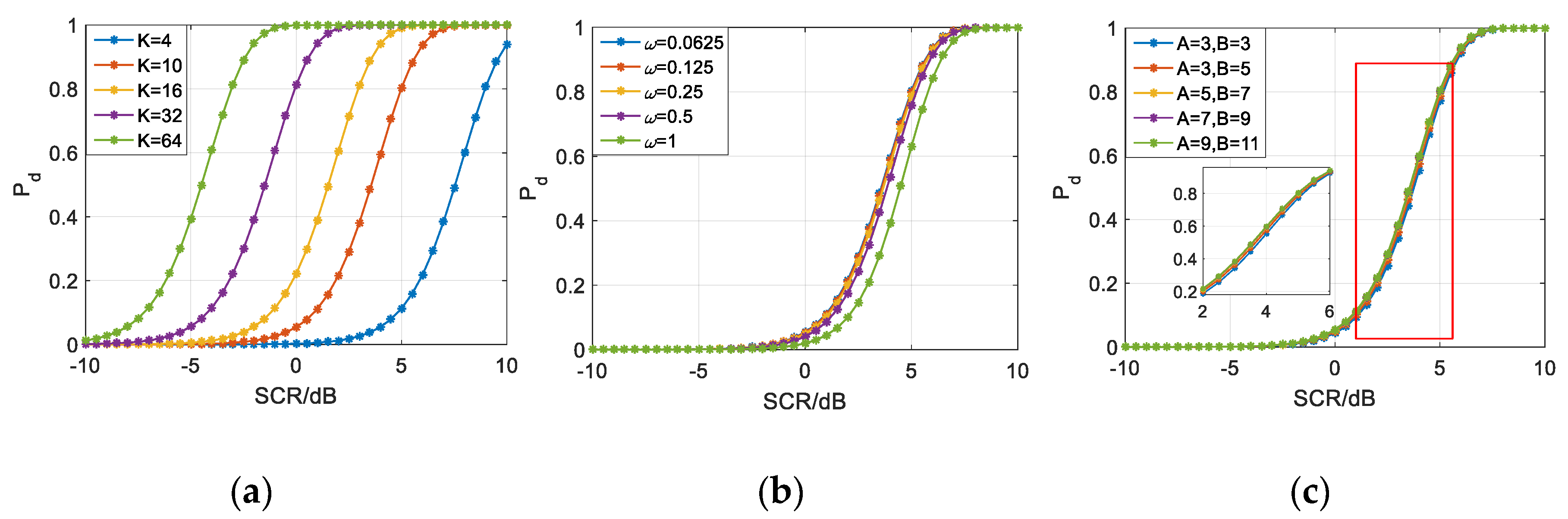
In the cases of homogeneous background, the detection performance evaluated by
is presented in
Figure 11. All the plots refer to
=
.
Figure 11a illustrates the plots of
versus SCR in different
conditions, when
,
and
. Better performance would be obtained with larger
under the same SCR condition.
Figure 11b shows that the detector performance after ten integrations could be slightly improved by increasing
, when
and
remain the same. Please note that the case
denotes the invalidation of iterative CM. In different
or
conditions, the plots in the third subfigure depict the performance variation when
,
. Even the partial enlarged drawing suggests that
is only marginally improved under larger
.
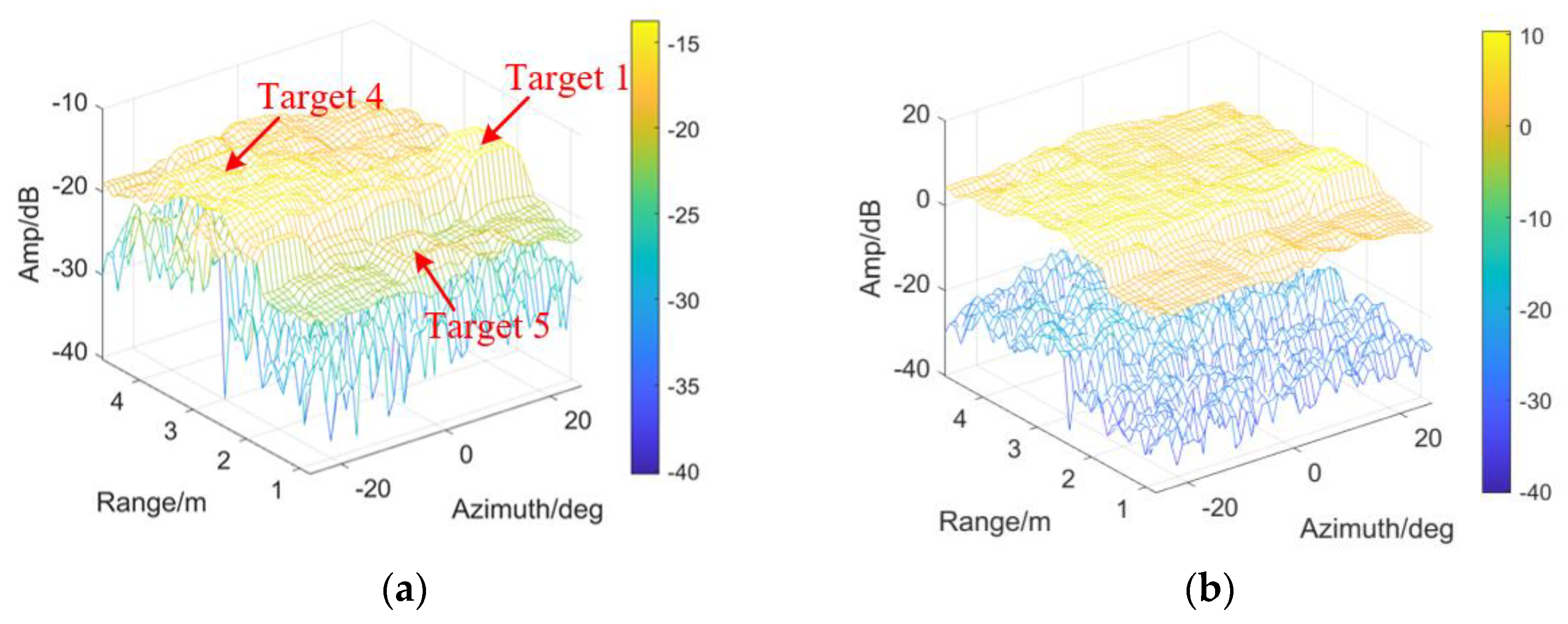
The real positions (all still denote the target geometric centers) of Target 1 (an aluminum aerosol bottle), 3 (a string of keys) and 5 (a pair of pliers with rubber handles) are displayed in
Table 5.
All three items are veiled by the Normal threshold in
Figure 12b while Target 1 and 3 are clearly indicated by the t-distributed detector in subfigure a.
is verified.
However, the threshold obeying t distribution misses Target 5 near the terrain boundary (around 2.2 m, calculated as
), which has smaller RCS (see
Figure 7f, mainly because of the rubber handles) than the aluminum Target 1. Thus, threshold modification is required according to
Section 3.2, since the reference map cells around the obscured object is believed heterogeneous when terrain boundaries are involved.
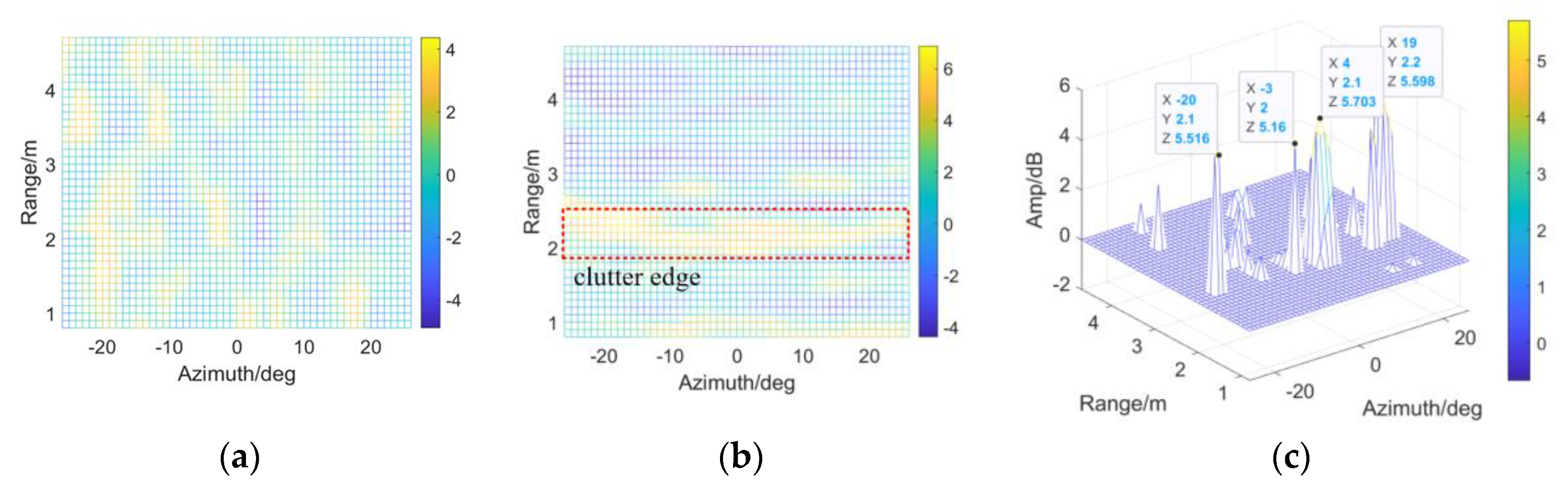
In
Figure 13a, there is not significant terrain boundary in azimuth, from −30 deg to 30 deg. In
Figure 13b, an extended clutter edge around 2.2 m is brought by the dramatic change between different scattering surfaces, as highlighted by the VIs much larger than zero dB. According to
Figure 13a,b, the detectability improvement, denoted by
, is displayed in
Figure 13c. Considering about the clutter fluctuations,
is relaxed to the length of interception where
and
, thus
could be obtained as in
Figure 5 when
and
. Significant improvement (
) is achieved, especially between the pavement and lawn.
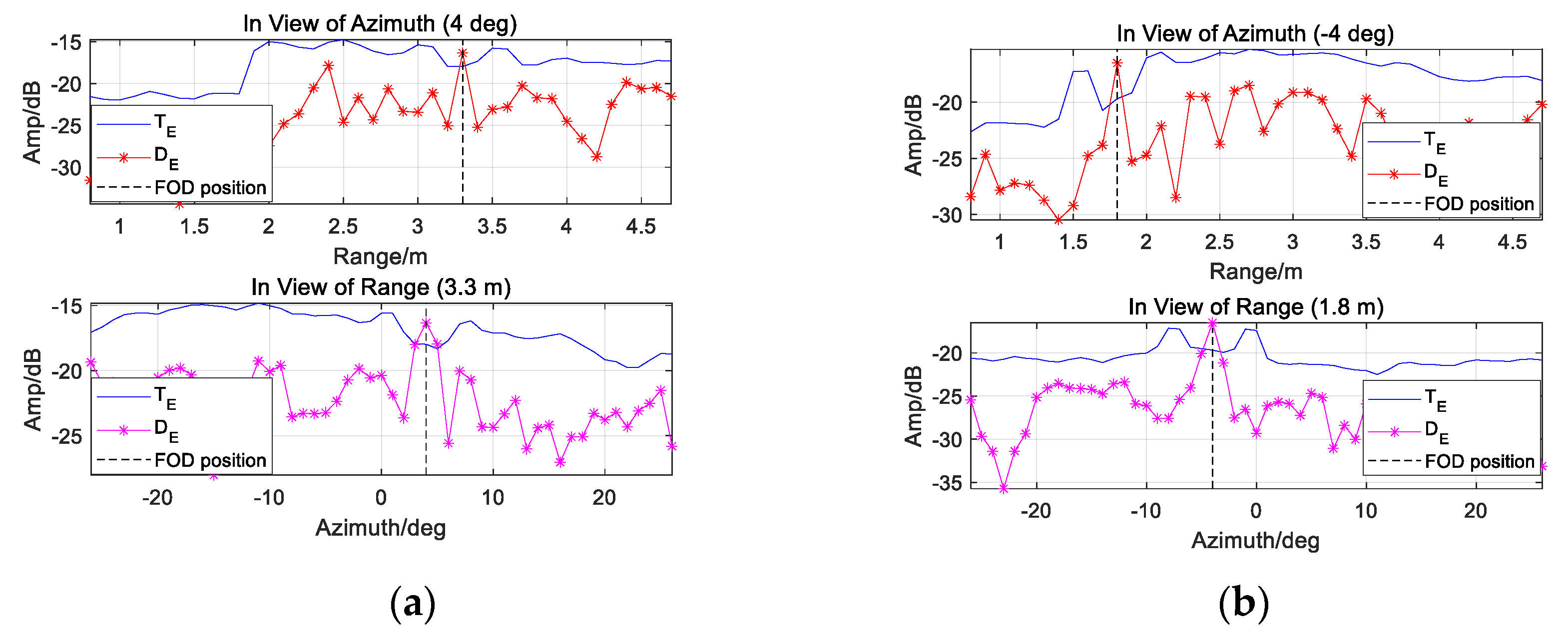
Figure 14 provides
and
in view of range and azimuth.
around Target 1 and 3 are almost equal to
. We also notice that the veiled Target 5 is indicated by
, which shows that
has better performance than
.
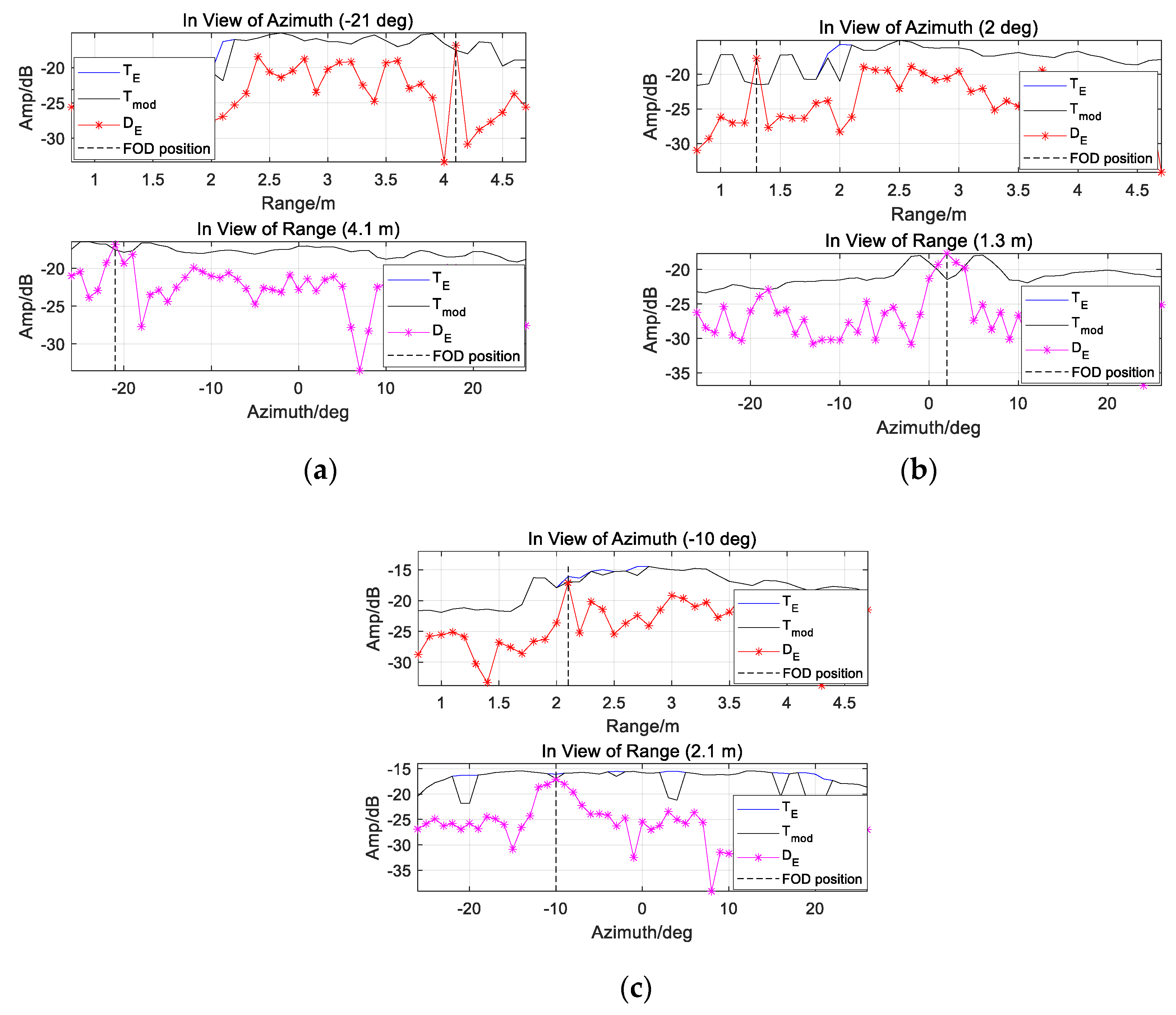
Target 1 (the aluminum bottle), 2 (the screwdriver), 4 (the spanner) and 5 (the pliers) are concerned in the third experiment. Their positions are given in
Table 6.
Notice that the first two targets may be disturbed by the extended background discontinuities. The other targets are located at the homogeneous pavement or lawn.
In
Figure 15, the Normal threshold is employed to compare with the student-t threshold. The same conclusion as
Figure 9 and
Figure 12 is obtained:
is believed t-distributed.
,
and
remain unchanged, the threshold is modified for detectability improvement according to the VIs in
Figure 16a,b. As the evaluation index,
is shown in
Figure 16c. More than 3 dB improvement could be obtained at the clutter edge especially in range, around 2.2 m. To sum up, the modified detector has the potential to overcome the target masking, when sharp changes are involved on the CM.
As shown in the following figures in view of range and azimuth, all the four targets are indicated, by employing
or
. See
Figure 17a,b,
could detect Target 1 rather than Target 2 (with smaller RCS). Meanwhile, the CFAR-based detector with
(denoted by the black lines) indicate veiled Target 2 effectively, no matter in range or azimuth.
6. Conclusions
CFAR algorithms for radar-based FOD detection deserves more attention for many compelling advantages under all time and all weather. However, the performance of these methods would deteriorate under the complex clutter background in airport scenes. This paper presented a threshold-improved approach based on a cell-averaging clutter-map (CA-CM-) CFAR and tested it on a millimeter-wave (MMW) radar system. Clutter cases were first classified with variability indexes (VIs). In homogeneous background, the threshold was calculated by the student-t-distributed test statistic; under the discontinuous clutter conditions, the threshold was modified according to current VI conditions, to address the performance decreasing caused by extended clutter edges. Experimental results verified that the chosen targets can be indicated by the t-distributed threshold in homogeneous background. Moreover, effective detection of the obscured targets could also be achieved with significant detectability improvement at extended clutter edges.
Nevertheless, target extension in azimuth, as a result of the horizontal aperture, need to be restrained to avoid false alarms. We also admit that some other debris with smaller RCSs are worthy of concerns, aiming at better detectability. In addition, future works will test in situ the radar system on an airport runway, which is essential to develop A-SMGCSs.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}