An Efficient NLOS Errors Mitigation Algorithm for TOA-Based Localization


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. NLOS Error Mitigation Algorithm for Non-Cooperative Source Localization
3. NLOS Error Mitigation Algorithm for Cooperative Source Localization
4. Simulation Results
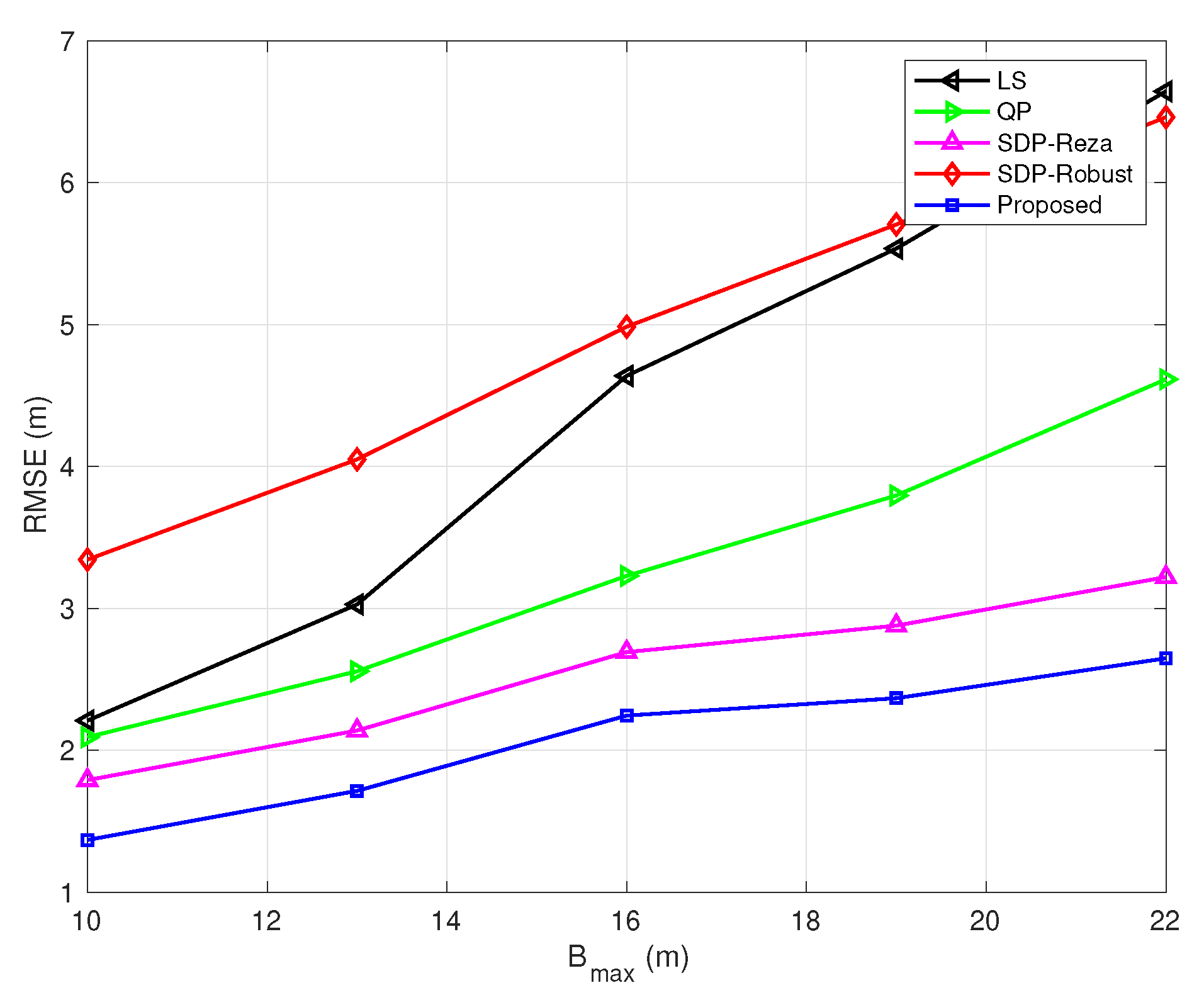
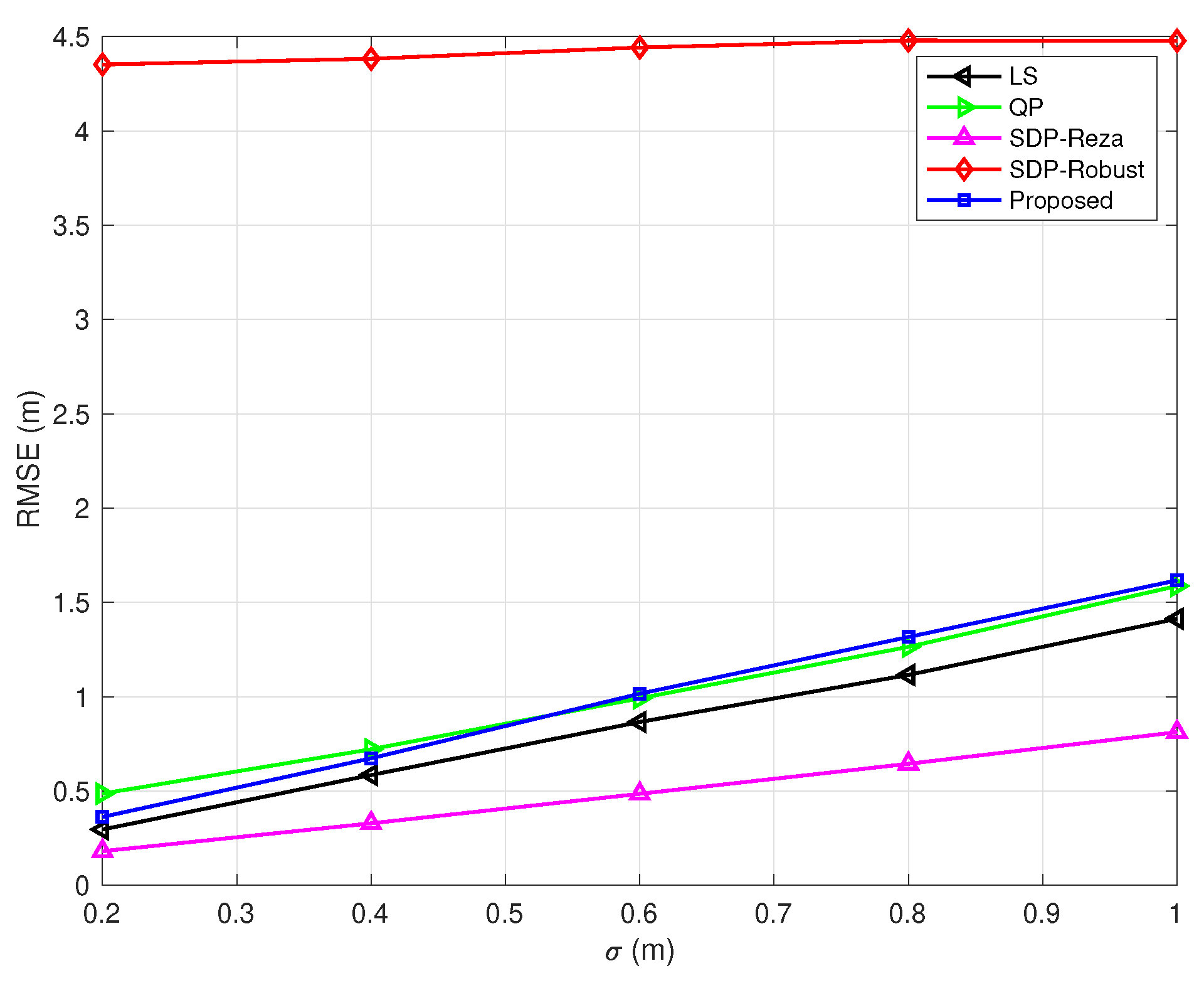
4.1. Non-Cooperative Localization
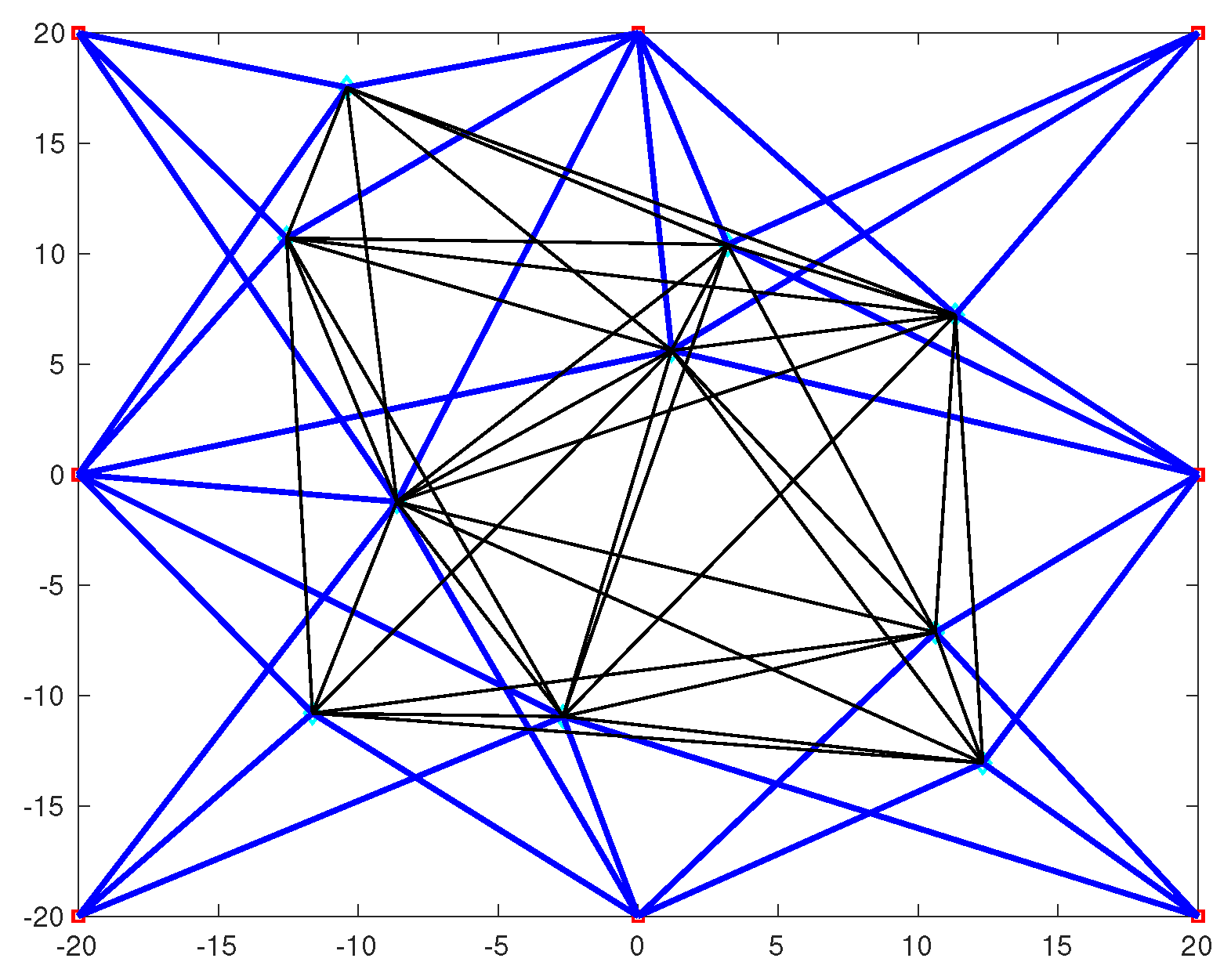
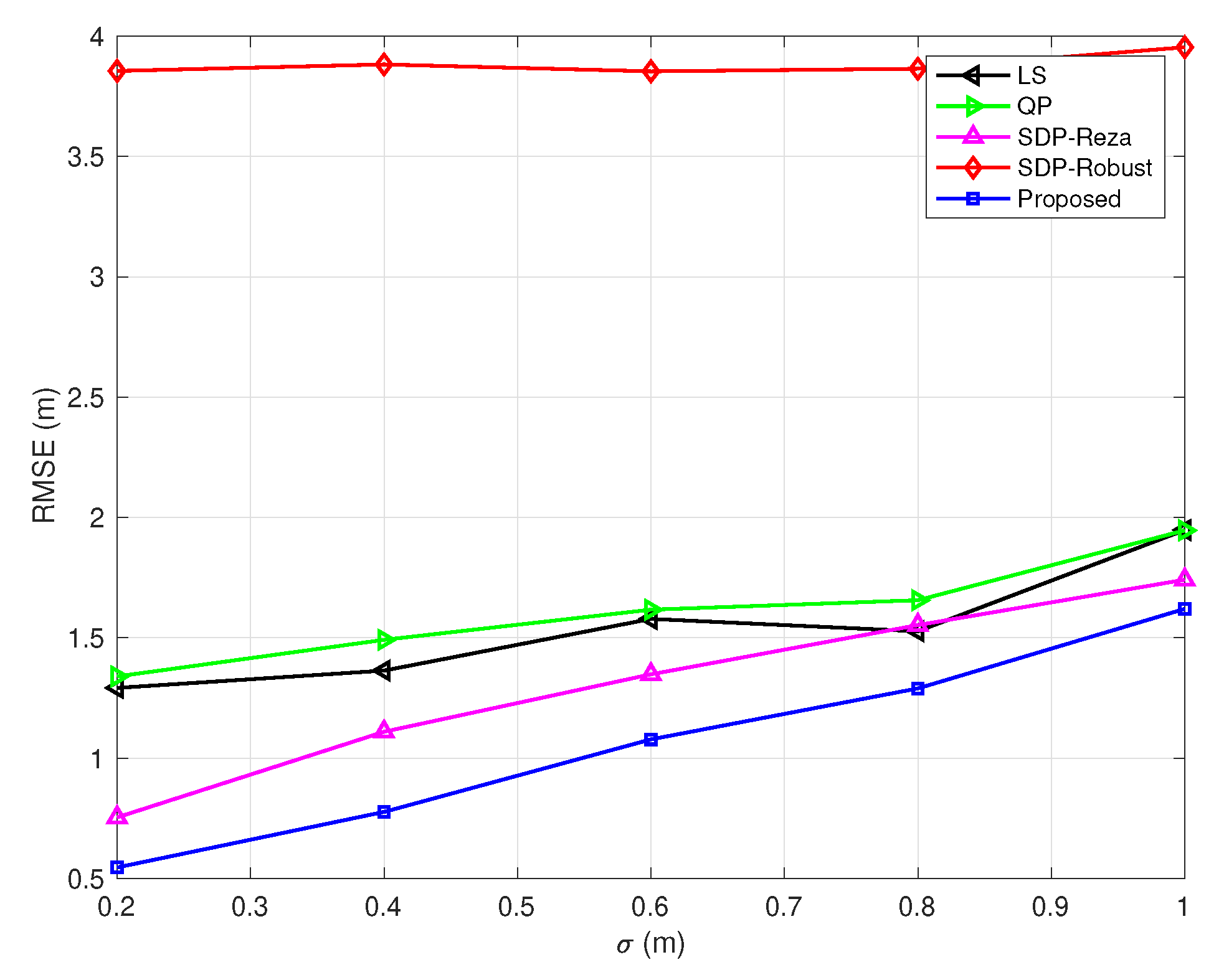
4.2. Cooperative Source Localization
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| TOA | Time-of-arrival |
| NLOS | Non-line-of-sight |
| SDP | Semidefinite programming |
| TDOA | Time-difference-of-arrival |
| RSS | Received signal strength |
| AOA | angle-of-arrival |
| 2SWLS | Two-step weighted least squares |
| SDR | Semidefinite relaxation |
| SOCR | Second-order cone relaxation |
| LOS | Line-of-sight |
| RMSE | Root mean-square error |
| ARMSE | Average root mean-square error |
| ML | Maximum likelihood |
References
- Sayed, A.H.; Tarighat, A.; Khajehnouri, N. Network-based wireless location: challenges faced in developing techniques for accurate wireless location information. IEEE Signal Process. Mag. 2005, 22, 20–40. [Google Scholar] [CrossRef]
- Fresno, J.; Robles, G.; Mart, J.; Stewart, B. Survey on the performance of source localization algorithms. Sensors 2017, 17, 2666. [Google Scholar] [CrossRef] [PubMed]
- Han, G.; Jiang, J.; Shu, L.; Xu, Y.; Wang, F. Localization algorithms of underwater wireless sensor networks: A survey. Sensors 2012, 12, 2026–2061. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, N.-H.; Dogancay, K. Single-platform passive emitter localization with bearing and Doppler-shift measurements using pseudolinear estimation techniques. Signal Process. 2016, 64, 336–348. [Google Scholar] [CrossRef]
- Nguyen, N.-K.; Dogancay, K. Signal Processing for Multistatic Radar Systems; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Beck, A.; Stoica, P.; Li, J. Exact and approximate solutions of source localization problems. IEEE Trans. Signal Process. 2008, 56, 1770–1778. [Google Scholar] [CrossRef]
- Zou, Y.; Wan, Q. Asynchronous time-of-arrival-based source localization with sensor position uncertainties. IEEE Commun. Lett. 2016, 20, 1860–1863. [Google Scholar] [CrossRef]
- Qiao, T.; Liu, H. An improved method of moments estimator for TOA based localization. IEEE Commun. Lett. 2013, 17, 1321–1324. [Google Scholar] [CrossRef]
- Nguyen, N.-K.; Dogancay, K. Optimal geometry analysis for multistatic TOA localization. IEEE Trans. Signal Process. 2016, 64, 4180–4193. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, H.; Xie, W.; Wan, Q. Semidefinite programming methods for alleviating sensor position error in TDOA localization. IEEE Access 2017, 5, 23111–23120. [Google Scholar] [CrossRef]
- Qiao, T.; Redfield, S.; Abbasi, A.; Su, Z.; Liu, H. Robust coarse position estimation for TDOA localization. IEEE Wirel. Commun. Lett. 2013, 17, 623–626. [Google Scholar] [CrossRef]
- Ouyang, R.; Wong, A.; Lea, C. Received signal strength-based wireless localization via semidefinite programming: Noncooperative and cooperative schemes. IEEE Trans. Veh. Technol. 2010, 59, 1307–1318. [Google Scholar] [CrossRef]
- Wang, G.; Yang, K. A new approach to sensor node localization using rss measurements in wireless sensor networks. IEEE Trans. Wirel. Commun. 2011, 10, 1389–1395. [Google Scholar] [CrossRef]
- Yin, J.; Wan, Q.; Yang, S.; Ho, K. A simple and accurate TDOA-AOA localization method using two stations. IEEE Signal Process. Lett. 2016, 23, 144–148. [Google Scholar] [CrossRef]
- Guvenc, I.; Chong, C. A survey on TOA based wireless localization and NLOS mitigation techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Qiao, T.; Liu, H. Improved least median of squares localization for non-line-of-sight mitigation. IEEE Commun. Lett. 2014, 18, 141–144. [Google Scholar] [CrossRef]
- Chan, Y.; Tsui, W.; So, H.; Ching, P. Time-of-arrival based localization under NLOS conditions. IEEE Trans. Veh. Technol. 2006, 55, 17–24. [Google Scholar] [CrossRef]
- Barral, V.; Escudero, C.; García, J.; Maneiro, R. NLOS identification and mitigation using low-cost UWB devices. Sensors 2019, 19, 3464. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Dea, B. A TOA-based location algorithm reducing the errors due to non-line-of-sight (NLOS) propagation. IEEE Trans. Veh. Technol. 2003, 52, 112–116. [Google Scholar] [CrossRef]
- Yang, K.; An, J.; Bu, X.; Lu, Y. TOA-based location algorithm for NLOS environments using quadratic programming. In Proceedings of the IEEE Wireless Communications and Networking Conference, Sydney, Australia, 18–21 April 2010; pp. 1–5. [Google Scholar]
- Vaghefi, R.; Schloemann, J.; Buehrer, R. NLOS mitigation in TOA-based localization using semidefinite programming. In Proceedings of the 10th Workshop on Positioning Navigation and Communication, Dresden, Germany, 20–21 March 2013; pp. 1–6. [Google Scholar]
- Wang, G.; Chen, H.; Li, Y.; Ansari, N. NLOS error mitigation for TOA-based localization via convex relaxation. IEEE Trans. Wirel. Commun. 2014, 13, 4119–4131. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, F.; Wang, G. NLOS error mitigation for TOA-based source localization with unknown transmission time. IEEE Sens. J. 2017, 17, 3605–3606. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, S.; Wang, G.; Li, Y. Robust NLOS error mitigation for TOA-based localization via second-order cone relaxation. IEEE Commun. Lett. 2015, 19, 2210–2213. [Google Scholar] [CrossRef]
- Wang, G.; So, A.M.; Li, Y. Robust convex approximation methods for TDOA-based localization under NLOS conditions. IEEE Trans. Signal Process. 2016, 64, 3281–3296. [Google Scholar] [CrossRef]
- Su, Z.; Shao, G.; Liu, H. Semidefinite programming for NLOS error mitigation in TDOA localization. IEEE Commun. Lett. 2018, 22, 1430–1433. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.; Kyperountas, S.; Hero, A.; Moses, R.; Correal, N. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M. Cooperative localization in wireless sensor networks. IEEE Proc. 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Vaghefi, R.; Buehrer, R. Cooperative localization in NLOS environments using semidefinite programming. IEEE Commun. Lett. 2015, 19, 1382–1385. [Google Scholar] [CrossRef]
- Huang, B.; Xie, L.; Yang, Z. TDOA-based source localization with distance-dependent noises. IEEE Trans. Wirel. Commun. 2014, 14, 468–480. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 1.21. 2010. Available online: http://cvxr.com/cvx (accessed on 2 March 2020).
- Lui, K.; Ma, W.; So, H.; Chan, F. Semidefinite programming algorithms for sensor network node localization with uncertainties in anchor positions and/or propagation speed. IEEE Trans. Signal Process. 2009, 57, 752–763. [Google Scholar] [CrossRef]
- Sturm, J. Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, Y.; Liu, H. An Efficient NLOS Errors Mitigation Algorithm for TOA-Based Localization. Sensors 2020, 20, 1403. https://doi.org/10.3390/s20051403
Zou Y, Liu H. An Efficient NLOS Errors Mitigation Algorithm for TOA-Based Localization. Sensors. 2020; 20(5):1403. https://doi.org/10.3390/s20051403
Chicago/Turabian StyleZou, Yanbin, and Huaping Liu. 2020. "An Efficient NLOS Errors Mitigation Algorithm for TOA-Based Localization" Sensors 20, no. 5: 1403. https://doi.org/10.3390/s20051403
APA StyleZou, Y., & Liu, H. (2020). An Efficient NLOS Errors Mitigation Algorithm for TOA-Based Localization. Sensors, 20(5), 1403. https://doi.org/10.3390/s20051403