Dynamic Modelling and Experimental Characterization of a Self-Powered Structural Health-Monitoring System with MFC Piezoelectric Patches †



Abstract
1. Introduction
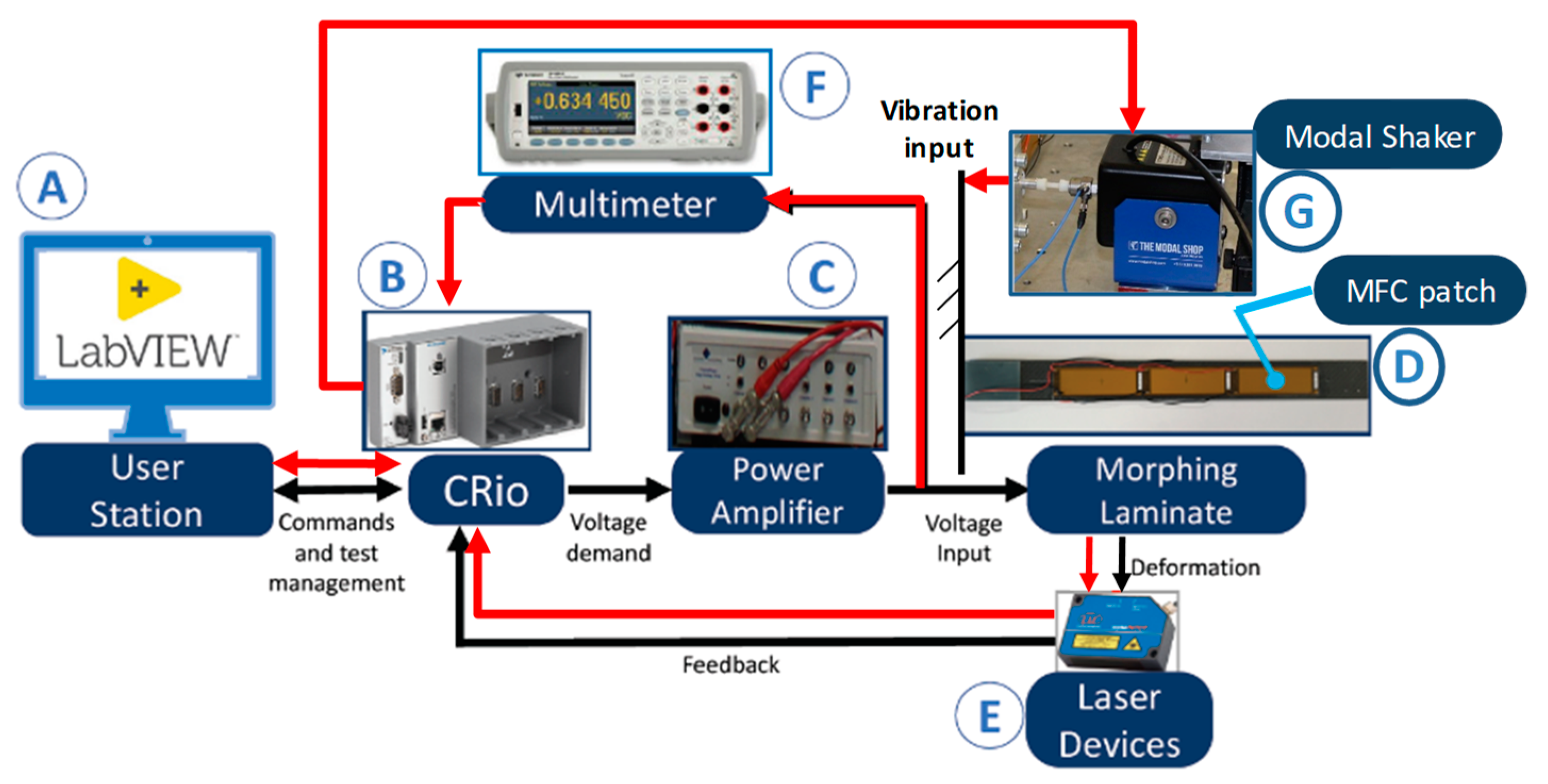
2. Experimental Test System
- Actuation mode (see black flows in Figure 4), in which the CRio embedded controller (B) receives from the user workstation (A) the demand voltages for the two channels of the morphing laminate, and a high-voltage amplifier (C) provides the MFC patches (D) with the electrical power;
- Sensing/energy harvesting mode (see red flows in Figure 4), in which the CRio embedded controller (B) receives from the user workstation (A) the demand vibration level for the modal shaker (G) connected to the laminate attachment, and a multimeter (F) measures the voltage generated by the MFC patches (D).
3. Development and Validation of the Model of System Dynamics
3.1. Dynamic Modelling
- three bending vibration modes of the laminate;
- the charge dynamics of the three couples of MFC patches, taking account of the piezoelectric hysteresis.
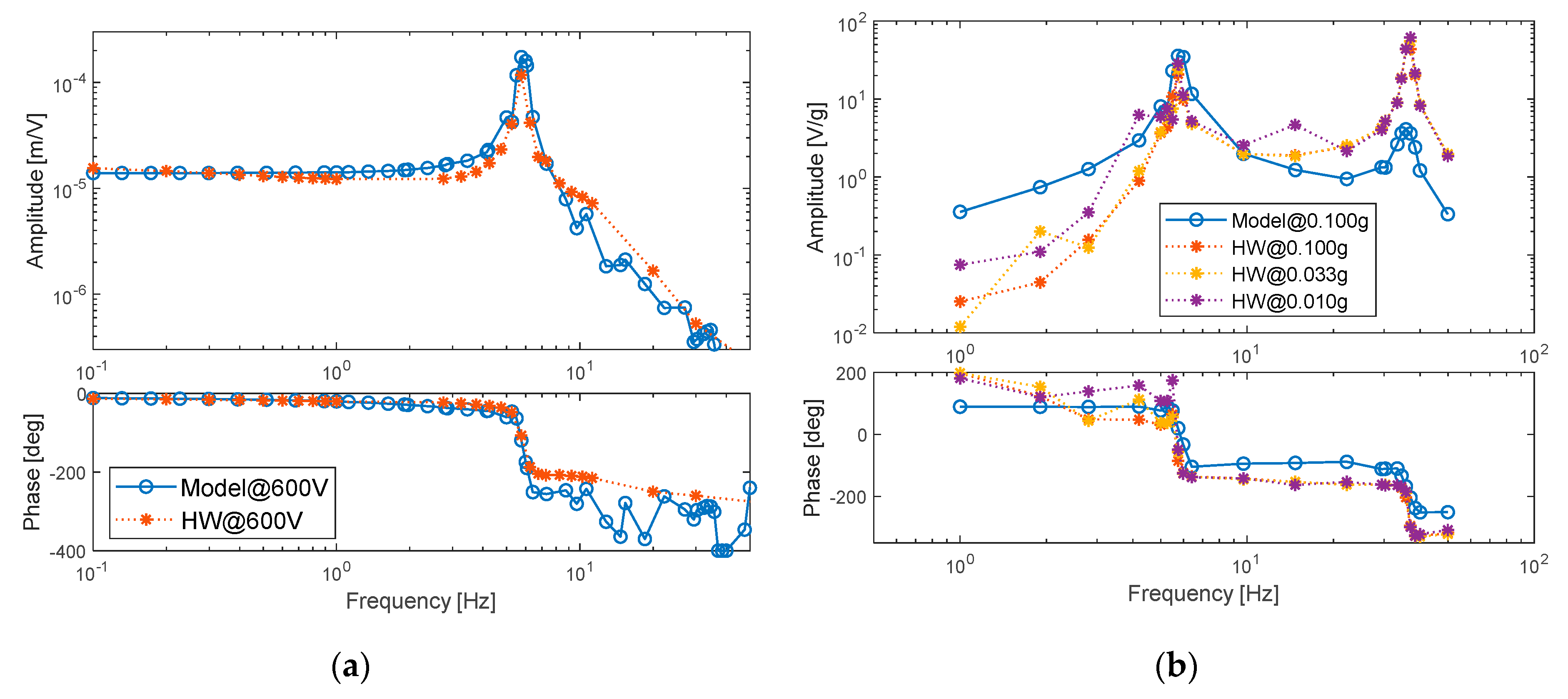
3.2. Experimental Validation of the Model
- estimation of the model parameters (Table 2) by minimizing the model deviations from the hardware behavior with reference to sinusoidal frequency response tests, i.e.,
- ○
- deformation responses to voltage inputs, with amplitudes from 150 to 600 V, ranging from 0.1 to 50 Hz, for a total of 120 tests and 200 simulations (Figure 6a);
- ○
- stored voltage responses to acceleration inputs of amplitudes from 0.01 to 0.1 g, ranging from 1 to 50 Hz, for a total of 120 tests and 200 simulations (Figure 6b).
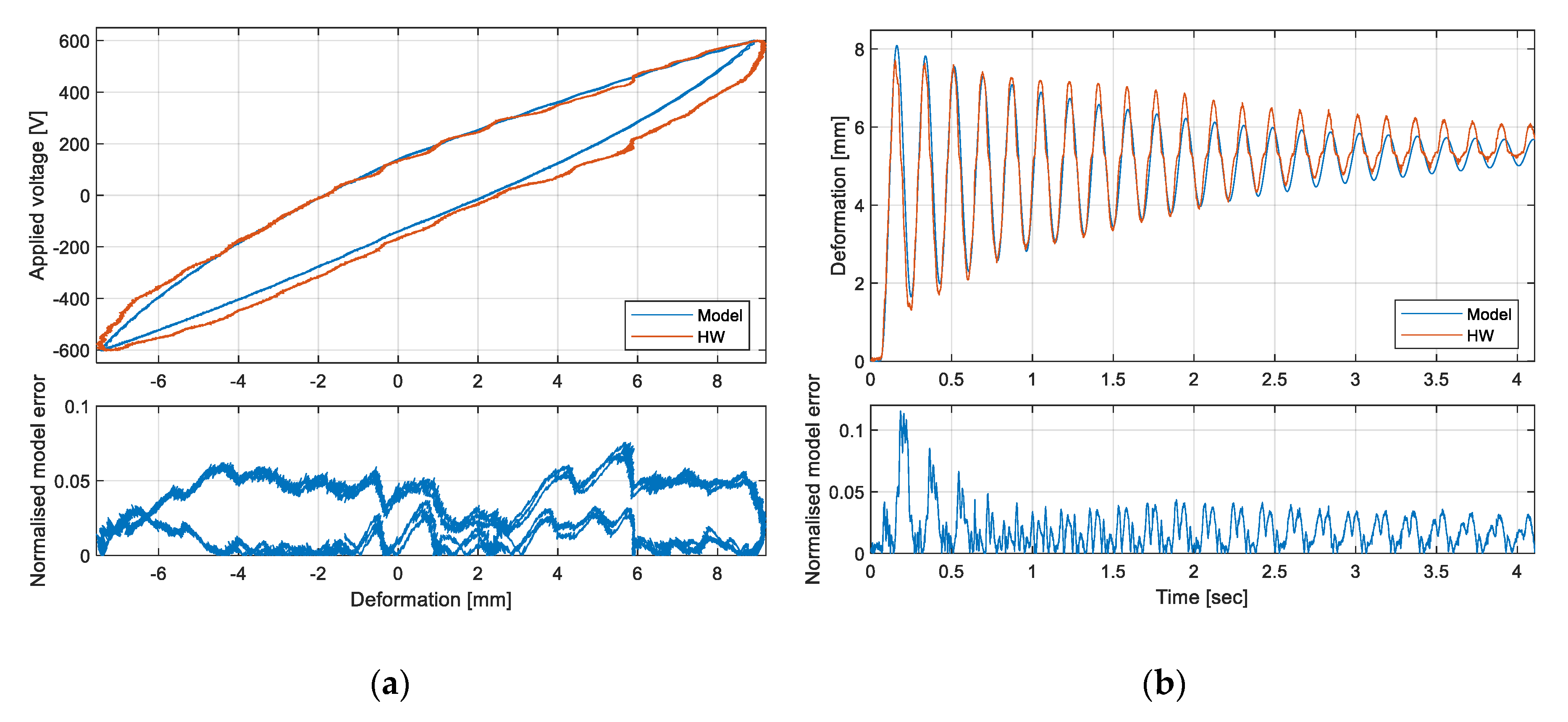
- model validation, by characterizing the model deviations from the hardware behavior with reference to time response tests, i.e.,
3.3. Assessment of the Energy Harvesting Capability
4. System Condition Monitoring
4.1. Condition-Monitoring Algorithm
4.2. Maintenance Built-in-Test Simulations
- i.
- for a subset of relevant system parameters (par), an acceptable range of deviations from the nominal behavior is defined. In this work, par = (k3, αh, βh), and this selection was made because the hysteresis parameters basically affect the low-frequency behavior, while the tip stiffness also impacts the high-frequency range, by varying the location of structural resonances;
- ii.
- a model of the “degraded” hardware is obtained from the experimentally-validated model, by injecting uniformly-distributed random deviations on the selected model parameters;
- iii.
- MBIT.a and MBIT.b are simulated by executing the condition-monitoring algorithms;
- iv.
- steps ii and iii are repeated for N times, to cumulate a statistical database.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Bishop, R.; Mossi, K. High displacement, high force piezoelectric actuator and sensor. J. Acoust. Soc. Am. 1998, 104, 1828. [Google Scholar] [CrossRef]
- Jayachandran, V.; Meyer, N.E.; Westervelt, M.A.; Sun, J.Q. Piezoelectrically driven speakers for active interior noise suppression. Appl. Acoust. 1999, 57, 263–277. [Google Scholar] [CrossRef]
- Jayachandran, V.; King, P.; Meyer, N.E.; Li, F.J.; Petrova, M.; Westervelt, M.A.; Hirsch, S.M.; Sun, J.Q. Real-time feed forward control of low-frequency interior noise using shallow spherical shell piezoceramic actuators. Smart Mater. Struct. 1999, 8, 579–584. [Google Scholar] [CrossRef]
- Corsaro, R.D. Lightweight low-frequency woofer for active sound control in payload fairings. In Proceedings of the 8th SPIE Annual International Symposium on Smart Structures and Materials, NDE and Health Monitoring, Newport Beach, CA, USA, 4–8 March 2001; pp. 254–258. [Google Scholar]
- Horner, G.C.; Taleghani, B.K. Single axis piezoceramic gimbal. J. Intell. Mater. Syst. Struct. 2001, 12, 157–160. [Google Scholar] [CrossRef]
- Granger, R.; Washington, G.; Kwak, S.K. Modeling and control of a singly curved active aperture antenna using curved piezoceramic actuators. J. Intell. Mater. Syst. Struct. 2000, 11, 225–233. [Google Scholar] [CrossRef]
- Marouzé, J.P.; Cheng, L. A feasibility study of active vibration isolation using THUNDER actuators. Smart Mater.Struct. 2002, 11, 854–862. [Google Scholar] [CrossRef][Green Version]
- Lee, S.; Cho, B.C.; Park, H.C.; Goo, N.S.; Yoon, K.J. Piezoelectric actuator–sensor analysis using a three-dimensional assumed strain solid element. J. Intell. Mater. Syst. Struct. 2004, 15, 329–338. [Google Scholar] [CrossRef]
- Gao, J.X.; Cheng, L. Modelling of a high performance piezoelectric actuator assembly for active and passive vibration control. Smart Mater. Struct. 2004, 13, 384–392. [Google Scholar] [CrossRef][Green Version]
- Cox, A.; Monopoli, D.; Cveticanin, D.; Goldfarb, M.; Garcia, E. The development of elastodynamic components for piezoelectrically actuated flapping micro-air vehicles. J. Intell. Mater. Syst. Struct. 2002, 13, 611–615. [Google Scholar] [CrossRef]
- Doherty, K.M.; Nejhad, M.G. Performance of an active composite strut for an intelligent composite modified Stewart platform for thrust vector control. J. Intell. Mater. Syst. Struct. 2005, 16, 335–354. [Google Scholar] [CrossRef]
- Waterfield, G. High performance pre-stressed piezoelectric bender actuator for digital valves. Ceram. Trans. 2004, 105, 467–482. [Google Scholar]
- Munday, D.; Jacob, J. Active control of separation on a wing with conformal chamber. In Proceedings of the 39th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar]
- Mossi, K.M.; Bryant, R.G. Characterization of piezoelectric actuators for flow control over a wing. In Proceedings of the 9th International Conference on New Actuators (Actuator 2004), Breman, Germany, 14–16 June 2004. [Google Scholar]
- Mane, P.; Mossi, K.; Bryant, R.G. Synthetic jets with piezoelectric diaphragms. Proc. SPIE 2005, 5761, 233–243. [Google Scholar]
- Mossi, K.M.; Mane, P.; Bryant, R.G. Velocity profiles for synthetic jets using piezoelectric circular actuators. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005. [Google Scholar]
- Kymissis, J.; Kendall, C.; Paradiso, J.A.; Gershenfeld, N. Parasitic power harvesting in shoes. In Proceedings of the 2nd IEEE International Conference on Wearable Computing, Pittsburgh, PA, USA, 19–20 October 1998. [Google Scholar]
- Mossi, K.M.; Green, C.W.; Ounaies, Z.; Hughes, E. Harvesting energy using a thin unimorph pre-stressed benders: Geometrical effects. J. Intell. Mater. Syst. Struct. 2005, 16, 249–261. [Google Scholar] [CrossRef]
- Ramsay, M.J.; Clark, W.W. Piezoelectric energy harvesting for bio MEMS applications. In Proceedings of the 8th SPIE Annual International Symposium on Smart Structures and Materials, NDE and Health Monitoring, Newport Beach, CA, USA, 4–8 March 2001; pp. 429–438. [Google Scholar]
- Dutoit, N.E.; Wardle, B.L.; Kim, S. Design considerations for MEMS scale piezoelectric mechanical vibration energy harvesters. Integr. Ferroelectr. 2005, 1, 121–160. [Google Scholar] [CrossRef]
- Soh, C.K.; Yang, Y.; Bhalla, S. Smart Materials in Structural Health Monitoring, Control and Biomechanics; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Arnau, A.; Soares, D. Piezoelectric Transducers and Applications; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Park, S.; Yun, C.B.; Inman, J. Structural health monitoring using electro-mechanical impedance sensors. Fatigue Fract. Eng. M. 2008, 31, 714–724. [Google Scholar] [CrossRef]
- Na, W.S.; Baek, J. A review of the piezoelectric electromechanical impedance-based structural health monitoring technique for engineering structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef]
- Mossi, K.M.; Scott, L. Sensor measurements for diagnostic equipment. In Proceedings of the 1st World Congress on Biomimetics and Artificial Muscles, Albuquerque, NM, USA, 9–12 December 2002. [Google Scholar]
- Bent, A.A.; Hagood, N.W. Piezoelectric fiber composite with interdigitated eletrodes. J. Intell. Mater. Syst. Struct. 1997, 8, 903–919. [Google Scholar] [CrossRef]
- Kovalovs, A.; Barkanov, E.; Gluhihs, S. Active control of structures using macro-fiber composite (MFC). J. Phys. Conf. Ser. 2007, 93, 012034. [Google Scholar] [CrossRef]
- Prasath, S.S.; Arockiarajan, A. Effective electromechanical response of macro-fiber composite (MFC): Analytical and numerical models. Int. J. Mech. Sci. 2013, 77, 98–106. [Google Scholar] [CrossRef]
- Zhang, S.Q.; Li, Y.X.; Schmidt, R. Modeling and simulation of macro-fiber composite layered smart structures. Compo. Struct. 2015, 126, 89–100. [Google Scholar] [CrossRef]
- Zhang, J.; Tu, J.; Li, Z.; Gao, K.; Xie, H. Modeling on actuation behavior of Macro-Fiber Composite laminated structures based on sinusoidal shear deformation theory. Appl. Sci. 2019, 9, 2893. [Google Scholar] [CrossRef]
- Moses, R.W.; Pototzky, A.S.; Henderson, D.A.; Galea, S.C.; Manokaran, D.S.; Zimcik, D.G.; Wickramasinghe, V.; Pitt, D.M.; Gamble, M.A. Actively controlling buffet-induced excitations. In Proceedings of the RTO/AVT-123 Symposium on Flow Induced Unsteady Loads and the Impact on Military Applications, Budapest, Hungary, 25–29 April 2005. [Google Scholar]
- Schiller, N.H.; Perey, D.F.; Cabell, R.H. Development of a practical broadband active vibration control system. In Proceedings of the 2011 ASME International Mechanical Engineering Congress and Exposition, Denver, CO, USA, 11–17 November 2011; pp. 683–690. [Google Scholar]
- Giles, A.M.; Machin, J.T.; Geriguis, J.A. Method and Apparatus for Inhibiting Formation of and/or Removing Ice from Aircraft Components. U.S. Patent No. 9,327,839, 3 May 2016. [Google Scholar]
- Molinari, G.; Quack, M.; Arrieta, A.F.; Morari, M.; Ermanni, P. Design, realization and structural testing of a compliant adaptable wing. Smart Mater. Struct. 2015, 10, 105027. [Google Scholar] [CrossRef]
- Paradies, R.; Ciresa, P. Active wing design with integrated flight control using piezoelectric macro fiber composites. Smart Mater. Struct. 2009, 3, 035010. [Google Scholar] [CrossRef]
- Chiarelli, M.R.; Binante, V.; Botturi, S.; Massai, A.; Kunzmann, J.; Colbertaldo, A.; Romano, D.G. On the active deformations of hybrid specimens. Aircr. Eng. Aerosp. Tec. 2016, 5, 676–687. [Google Scholar] [CrossRef]
- Chiarelli, M.R.; Cozzolino, A.; Kunzmann, J.; Lanzi, L. Feasibility Analysis on the Use of Piezo-Electric Materials as Actuators of Thin Walled Active Structures. Available online: http://www.futurewings.eu/FILES_linked/Deliverable_D_1_1Pisa_publishable.pdf (accessed on 8 February 2020).
- Prosser, W.H.; Wu, M.C.; Allison, S.G.; DeHaven, S.L.; Ghoshal, A. Structural health monitoring sensor development at NASA Langley Research Center. In Proceedings of the International Conference on Computational & Experimental Engineering and Sciences (ICCES ’03), Corfù, Greece, 25–29 July 2003. [Google Scholar]
- Roellig, M.; Schubert, L.; Lieske, U.; Boehme, B.; Frankenstein, B.; Meyendorf, N. FEM assisted development of a SHM-piezo-package for damage evaluation in airplane components. In Proceedings of the 11th International Thermal, Mechanical & Multi-Physics Simulation, and Experiments in Microelectronics and Microsystems (EuroSimE), Bordeaux, France, 26–28 April 2010. [Google Scholar]
- Di Rito, G.; Luciano, B.; Chiarelli, M.R.; Galatolo, R. Condition monitoring of a morphing laminate with MFC piezoelectric patches via model-based approach. In Proceedings of the 6th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Turin, Italy, 19–21 June 2019; pp. 241–246. [Google Scholar]
- Green, C.; Mossi, K.M.; Bryant, R.G. Scavenging energy from piezoelectric materials for wireless sensor applications. In Proceedings of the 2005 ASME International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2005; pp. 93–99. [Google Scholar]
- Yuan, J.; Xie, T.; Shan, X.; Chen, W. Experimental study on a self-powered piezoelectric sensor under vibration environment. In Proceedings of the 18th IEEE International Symposium on the Applications of Ferroelectrics, Xian, China, 23–27 August 2009. [Google Scholar]
- Xia, H.; Xia, Y.; Ye, Y.; Qian, L.; Shi, G. Simultaneous wireless strain sensing and energy harvesting from multiple piezo-patches for Structural Health Monitoring applications. In Proceedings of the 11th International Thermal, Mechanical & Multi-Physics Simulation, and Experiments in Microelectronics and Microsystems (EuroSimE), Bordeaux, France, 26–28 April 2010. [Google Scholar]
- Chao, P.C.P. Energy harvesting electronics for vibratory devices in self-powered sensors. IEEE Sens. J. 2011, 11, 3106–3121. [Google Scholar] [CrossRef]
- Álvarez-Carulla, A.; Colomer-Farrarons, J.; López-Sánchez, J.; Miribel-Català, P. An adaptative self-powered energy harvester strain sensing device based of mechanical vibrations for structural health monitoring applications. In Proceedings of the 25th International Symposium on Industrial Electronics (ISIE), Santa Clara, CA, USA, 8–10 June 2016; pp. 638–644. [Google Scholar]
- Mayergoyz, I.D. The classical Preisach model of hysteresis and reversibility. J. Appl. Phys. 1991, 8, 4602–4604. [Google Scholar] [CrossRef][Green Version]
- Brokate, M.; Sprekels, J. Hysteresis and Phase Transitions; Springer: New York, NY, USA, 1996. [Google Scholar]
- Sun, L.; Ru, C.; Rong, W.; Chen, L.; Kong, M. Tracking control of piezoelectric actuator based on a new mathematical model. J. Micromech. Microeng. 2004, 11, 1439. [Google Scholar]
- Xue, X.; Chen, L.; Wu, X.; Sun, Q. Study on electric-mechanical hysteretic model of macro-fiber composite actuator. J. Intell. Mater. Syst. Struct. 2014, 12, 1469–1483. [Google Scholar]
- Kamlah, M.; Jiang, Q. A constitutive model for ferroelectric PZT ceramics under uniaxial loading. Smart Mater. Struct. 1999, 4, 441. [Google Scholar] [CrossRef]
- Goldfarb, M.; Celanovic, N. Modeling piezoelectric stack actuators for control of micromanipulation. IEEE Control Syst. Mag. 1997, 3, 69–79. [Google Scholar]
- Bouc, R. Forced vibration of mechanical systems with hysteresis. In Proceedings of the 4th Conference on Non-Linear Oscillation, Prague, Czechoslovakia, 5–9 September 1967. [Google Scholar]
- Wen, Y.K. Method for random vibration of hysteretic systems. J. Eng. Mech. Div. 1976, 2, 249–263. [Google Scholar]
- Ikhouane, F.; Rodellar, J. Systems with Hysteresis: Analysis, Identification and Control Using the Bouc-Wen Model; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Data SheetModel. Available online: http://www.maxell.com.tw/images/uploads/2015/05/ML2032_DataSheet_table.pdf (accessed on 8 February 2020).
- Barreras, J.V.; Schaltz, E.; Andreasen, S.J.; Minko, T. Datasheet-based modeling of Li-Ion batteries. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012. [Google Scholar]
- Di Rito, G.; Galatolo, R. Experimental and theoretical study of the electrical failures in a fault-tolerant direct-drive servovalve for primary flight actuators. Proc. IMechE Part I: J. Syst. Control Eng. 2008, 222, 757–769. [Google Scholar] [CrossRef]
- Di Rito, G.; Schettini, F. Health monitoring of electromechanical flight actuators via position-tracking predictive models. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Di Rito, G.; Schettini, F.; Galatolo, R. Model-based health-monitoring of an electro-mechanical actuator for unmanned aerial system flight controls. In Proceedings of the 4th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 481–490. [Google Scholar]
- Di Rito, G.; Schettini, F.; Galatolo, R. Self-monitoring electro-mechanical actuator for medium altitude long endurance unmanned aerial vehicle flight controls. Adv. Mech. Eng. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Di Rito, G.; Schettini, F.; Galatolo, R. Model-based prognostic health-management algorithms for the freeplay identification in electromechanical flight control actuators. In Proceedings of the 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 340–345. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Voltage demand range | V | −500; 1500 |
| Temperature operating range | °C | −20; 80 |
| Operational frequency range | kHz | DC; 10 |
| Stall force (tensile stress) | N | 454 |
| Free strain | ppm | 1800 |
| Lifetime @ 1 kV peak-to-peak | cycles | 109 |
| Symbol | Definition | Unit | Value | Identification Method |
|---|---|---|---|---|
| Rep | Patch resistance | Ohm | 1500 | TM |
| Cep | Patch capacitance | F | 1.06 10−5 | TM |
| dep | Patch piezoelectric coefficient | m/V | 1.37 10−5 | MEM |
| m1 | Mass of the root section of the laminate | kg | 1.16 10−3 | TM |
| m2 | Mass of the intermediate section of the laminate | kg | 2.32 10−3 | TM |
| m3 | Mass of the tip section of the laminate | kg | 1.39 10−3 | TM |
| k1 | Stiffness related to root section bending | N/m | 332.98 | MEM |
| k2 | Stiffness related to intermediate section bending | N/m | 125.40 | MEM |
| k3 | Stiffness related to tip section bending | N/m | 21.28 | MEM |
| c1 | Damping related to root section bending | N s/m | 0.098 | MEM |
| c2 | Damping related to intermediate section bending | N s/m | 0.020 | MEM |
| c3 | Damping related to tip section bending | N s/m | 0.025 | MEM |
| αh | Bouc-Wen linearity factor | -- | 0.605 | MEM |
| Ah | Bouc-Wen dissipation gain | -- | −1 | LA |
| n | Bouc-Wen shape factor | -- | 1 | LA |
| βh | Bouc-Wen shape factor | V−n | 8.307 | MEM |
| γh | Bouc-Wen shape factor | V−n | 0 | LA |
| Symbol | Definition | Unit | Value |
|---|---|---|---|
| fmon | Monitoring frequency | Hz | 100 |
| εth | Normalized error threshold | -- | 0.225 |
| countmax | Fault counter threshold | -- | 200 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Rito, G.; Chiarelli, M.R.; Luciano, B. Dynamic Modelling and Experimental Characterization of a Self-Powered Structural Health-Monitoring System with MFC Piezoelectric Patches. Sensors 2020, 20, 950. https://doi.org/10.3390/s20040950
Di Rito G, Chiarelli MR, Luciano B. Dynamic Modelling and Experimental Characterization of a Self-Powered Structural Health-Monitoring System with MFC Piezoelectric Patches. Sensors. 2020; 20(4):950. https://doi.org/10.3390/s20040950
Chicago/Turabian StyleDi Rito, Gianpietro, Mario Rosario Chiarelli, and Benedetto Luciano. 2020. "Dynamic Modelling and Experimental Characterization of a Self-Powered Structural Health-Monitoring System with MFC Piezoelectric Patches" Sensors 20, no. 4: 950. https://doi.org/10.3390/s20040950
APA StyleDi Rito, G., Chiarelli, M. R., & Luciano, B. (2020). Dynamic Modelling and Experimental Characterization of a Self-Powered Structural Health-Monitoring System with MFC Piezoelectric Patches. Sensors, 20(4), 950. https://doi.org/10.3390/s20040950