3.2. GO/PPy@PU Conductive Sponge Manufacturing Process
GO can be manufactured at large scales, and it is a potential precursor for the diversified composite materials, because of its good solubility and large number of active functional groups. The formation of uniform and controllable composite conductive layer by a water-based LBL assembly is fully achievable. In this study, we achieved the complexation of GO and PPy and rapid and stable deposition on sponge fibers.
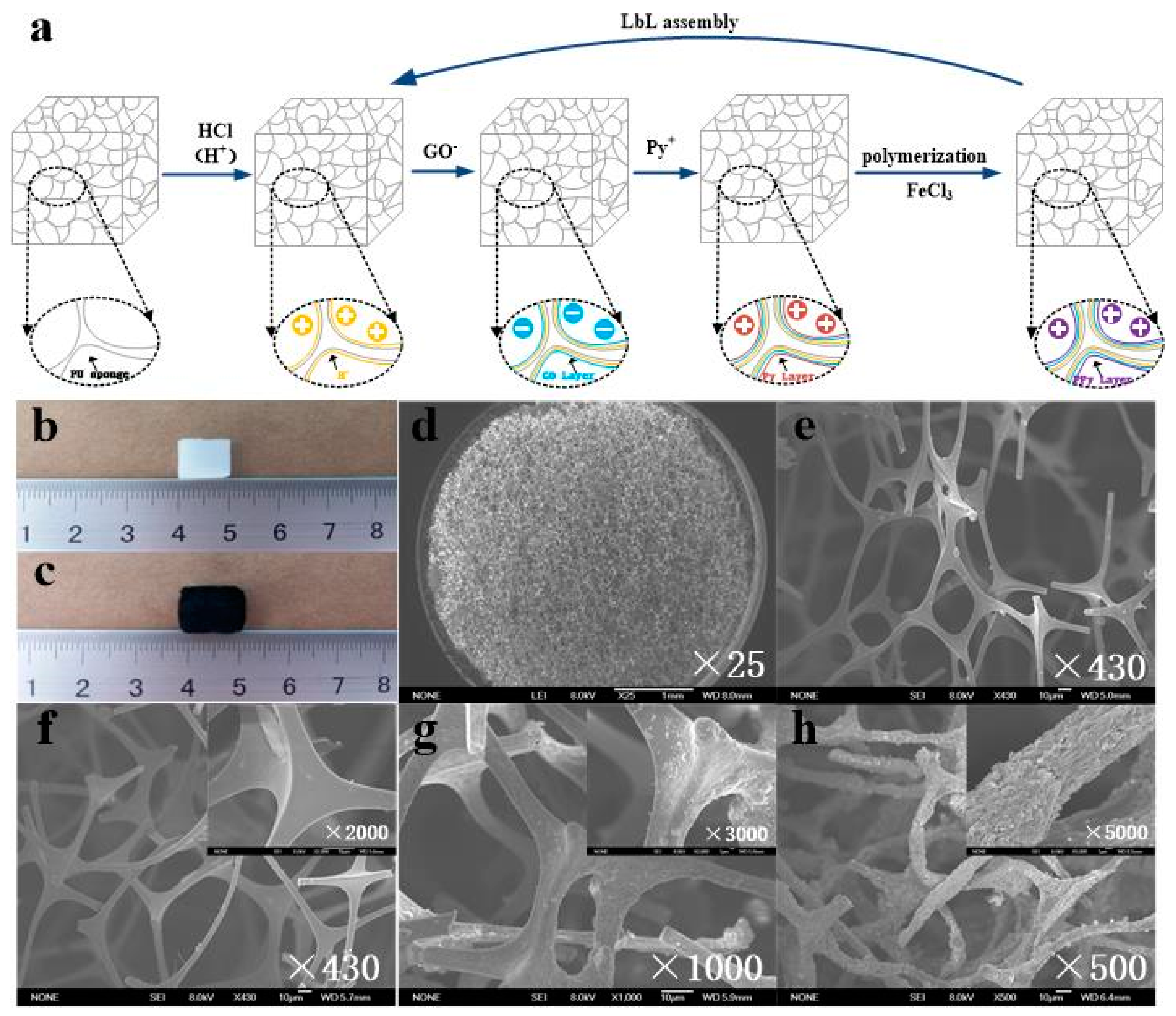
Figure 1a shows the schematic fabrication procedure of GO/PPy@PU conductive sponges. Cleaned PU sponges (
Figure 1b) were first immersed in hydrochloric acid solution such that positive charge was attached to the surface of the fiber. Then, the sponges were immersed in GO solution (2 mg·L
−1)to deposit a layer of anionic GO. Scanning electron microscope (SEM) images (
Figure 1d) show that the PU sponge has a 3D network structure. The surface of fiber skeleton is very smooth (
Figure 1e). After coating GO layers on the PU sponges, a thin layer with slight wrinkles was attached to the surface of the PU skeleton, as shown in
Figure 1f. It could be proved that GO had been successfully deposited on the surface of the fiber. The GO layers showed wrinkled structures, because of the electrostatic repulsive interaction between GO sheets with the same charge. Subsequently, the sponges were immersed in pyrrole (Py) ethanol solution (0.35 mol·L
−1) for 10 min. The Py monomers were adsorbed on the graphene oxide film under electrostatic attraction, as shown in
Figure 1g, which indicated that the pyrrole monomers had been attached to the GO layers. Finally, the sponges were immersed in FeCl
3 solution (0.5 mol·L
−1) for 30 min to initiate the polymerization of pyrrole. As shown in
Figure 1h, the fragment structure was completely deposited on the sponge fibers with two dipping coatings, and it was confirmed that the GO/PPy composite nanomaterial was formed. The volume of the sponge square increased macroscopically, as shown in
Figure 1c, due to the coarsening of the sponge fibers. The above results imply that the GO/PPy composite conductive layers had been deposited on PU sponges by the LBL method.
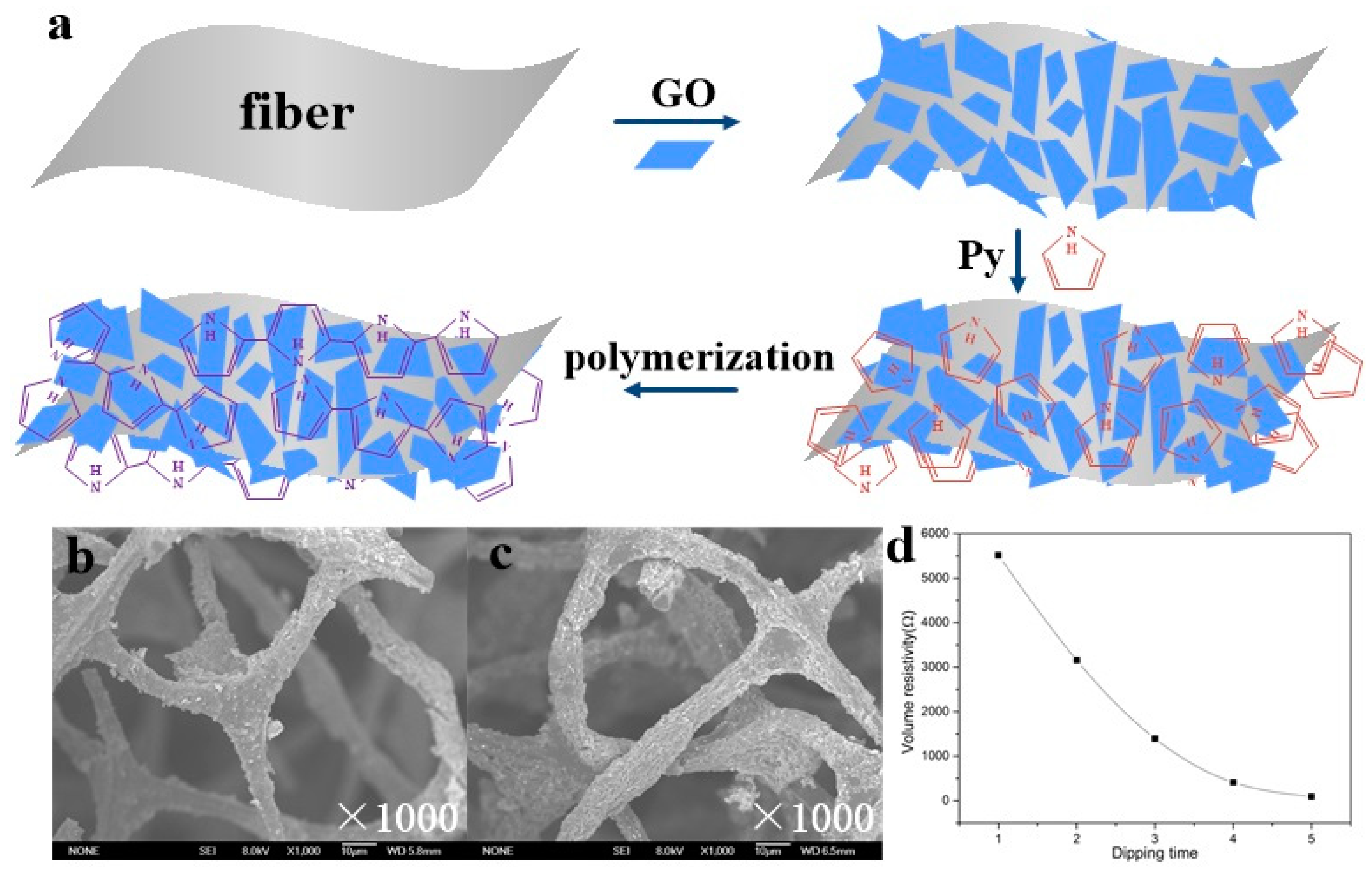
Figure 2a shows the synthesis process of GO/PPy. A GO sheet with a large number of active functional groups could act as an active agent to attract Py monomers to the GO layers. With Py monomer as the core, PPy grew preferentially on GO sheets under the action of oxidants. With the GO sheet as the base and PPy as the filler, negatively charged GO and negatively charged PPy combined in space to form a fragmental structure. During the compounding process of GO/PPy, the GO layers were broken and wrapped in the PPy matrix, forming a rough fragmental surface morphology, making GO/PPy a composite conductive material with high surface area and excellent electrical conductivity.
Figure 2b,c show the microstructure of the sponge skeleton with one and two dipping coatings, respectively. With one dipping coating, the composite conductive layers were not completely deposited on part of the skeleton, and the resistance was unstable during the load-unload cycle.
Figure 2d shows the initial resistance of the sponge sensors with different dipping times. As the durations of dipping coatings increased, the initial resistance of the sensors decreased exponentially, which was consistent with the prediction of the percolation theory. According to the threshold effect, piezoresistive materials with a conductivity near the threshold have a higher sensitivity. Excluding the sensor with one dipping coating, the sensor with a two dipping coating was closest to the threshold, so it had the highest sensitivity. Meanwhile, the larger the initial resistance, the larger the measurement range of the sensor.
It is notable that the manufacture of GO/PPy@PU conductive sponge is very simple, the sponge is basically saturated after five cycles. Thermal reduction is not required. The sensor requires only two cycles of dipping coating to achieve maximum sensitivity, as discussed below. The simple and secure manufacturing method of GO/PPy@PU conductive sponges make it possible on large scale.
The GO/PPy@PU conductive sponge was measured for the maximum compression.
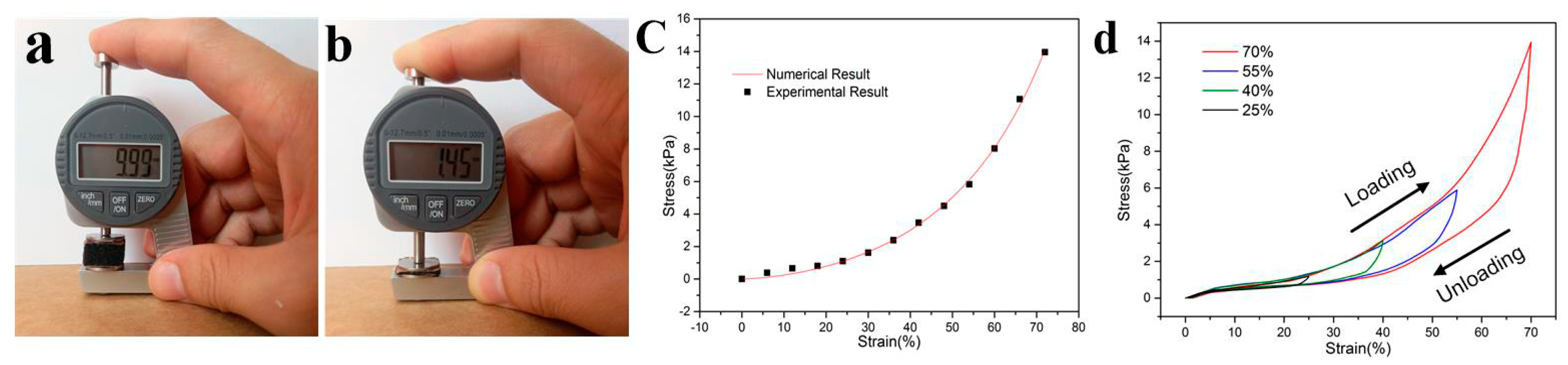
Figure 3a,b show images of the original sponge and the sponge with maximum compression deformation. The obtained GO/PPy@PU conductive sponge exhibited excellent flexibility with a maximum compression of 85.5%. This was attributed to the special 3D structure of sponge.
Figure 3c presents the compressive stress–strain curves of GO/PPy@PU conductive sponge under 0–70% strain. It could be seen, in the region where strain was larger than 40%, the pressure required to increase the strain of samples increased gradually because of the densification of GO/PPy@PU conductive sponge. Equation (1) was selected to fit the stress-strain relationship of polyurethane sponges during compression [
27].
The parameters related to material properties are as follows:
,
,
. The solid line in
Figure 3c was the stress-strain curve of the polyurethane sponge predicted by the model. It could be seen that the experimental results agreed well with the theoretical predictions, indicating the correctness of the sponge compression model.
Figure 3d illustrates the cyclic stress–strain curves of GO/PPy@PU. Strain rate was 0.2 s
−1(2 mm/s). Data sampling frequency of the tester was 1000 Hz. Wave pattern of loading/unloading cycle was triangular. The sponge sensor had a pressure hysteresis during unloading. The larger the strain, the more obvious the hysteresis.
PU sponge has excellent compressibility and ability to recover from deformation. As a sensor structure substrate, it helps to test large strains.
3.3. Pressure-Sensing Mechanism
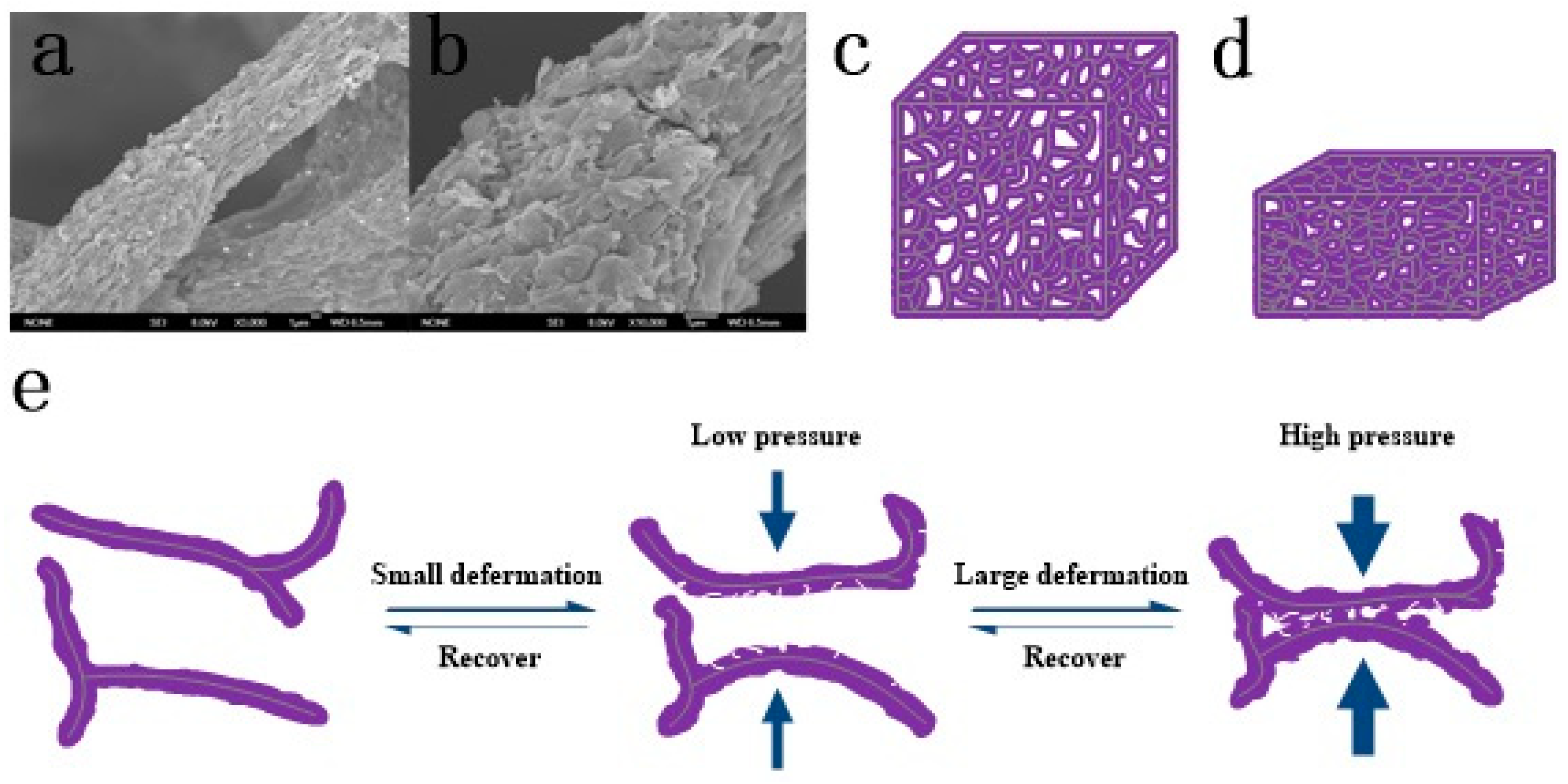
It has been proved that rough conductive microstructures could improve the sensitivity of pressure sensors. Inspired by this, we did not choose graphene as the conductive filler, but choose the fragmental GO/PPy composite. The original PU sponge had a 3D porous network structure, which was integrally connected by a randomly distributed fiber skeleton. The deposition of GO/PPy composite material on the sponge fiber by LBL avoided a wide range of intertwining or stacking, so that the conductive filler could be uniformly wrapped on the sponge fiber, which ensured the cycle stability of the prepared sensor. As shown in
Figure 4a,b, the GO/PPy composite was completely coated onto the sponge skeleton. When the GO/PPy@PU conductive sponge was compressed, the bending of the skeleton caused tension on the GO/PPy conductive layers. Therefore, permanent mechanical microcracks were easily generated on the GO/PPy layers. However, the conductive layers composed of composite material were multi-layered structure, there were certain buffer gaps between the GO/PPy sheets. Therefore, when the crack was generated and enlarged, there were not many completely broken cracks generated to cause an inverse increase in resistance.
Moreover, the compression of the sponge under small deformation would lead to the rapid change of the contact between the conductive skeleton of GO/PPy and the contact area, which would cause the breakage-recovery of local conductive path, as shown in
Figure 4e. Under this synergistic effect, the sensitivity of the sensor under small strain was improved.
With the further increase of compressive strain, the gap in the sponge was further reduced, and the contact quantity of GO/PPy conductive skeleton would increase to saturation. So the decisive effect on the total resistance was the contact area between GO/PPy conductive skeleton, as shown in
Figure 4c,d.
According to the theory of percolation, the relationship between the resistivity of the composite material and the content of the conductive filler can be expressed by Equation (2).
where
and
stand for the resistivity of the conductive sponge and GO/PPy composite,
is the content of the GO/PPy in conductive sponge,
represents the percolation threshold, t reveals the critical factor.
The volume resistance and volume parameters of the conductive sponge can be described by the Equation (3):
where R represents resistance of the conductive sponge, L and S reveals thickness and cross-sectional area of conductive sponge. Then we have the Equation (4) to describe the relative resistance change of the conductive sponge.
where
,
respectively represents the resistance of the conductive sponge in the initial state and an arbitrary compressed state,
respectively represents the thickness of the conductive sponge in the initial state and an arbitrary compressed state,
,
represent the volume fraction of the conductive filler GO / PPy in the initial state and an arbitrary compressed state, respectively.
When the conductive sponge was subjected to normal force, the compression strain produced was
.
Set
substituting Equation (5) and Equation (6) into Equation (4), we have
The conductive fibers in the conductive sponge were connected to form the 3D network, so the volume fraction of the conductive filler in the initial state
exceeded critical volume fraction
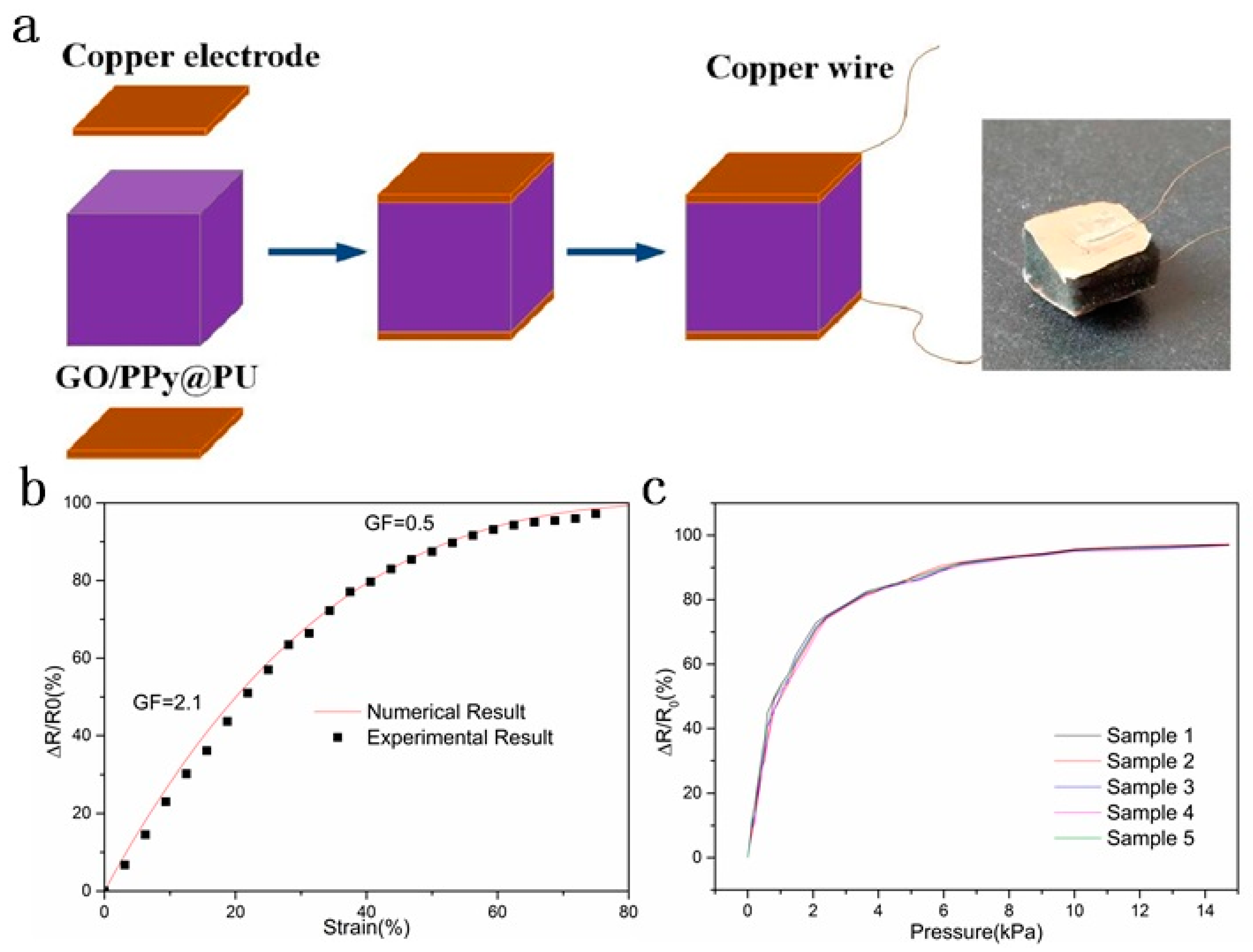
, m < 1. Equation (7) describes the relationship between the relative resistance change and strain. The opposite sides of the sensor sponge were coated with conductive silver paste with copper sheets to eliminate contact resistance and obtain a stable signal output, as shown in
Figure 5a. When m = 0.05, t = 2, the theoretical value showed a good fit with the experimental value, as shown in
Figure 5b. It could be seen that the relative resistance change was divided into two stages. When the strain was less than 40%, the relative resistance change increased rapidly with strain, indicating that the resistance decreased rapidly. This could be attributed to the simultaneous increase in the number of contacts and the contact area of the GO/PPy conductive skeleton in this stage. However, as the applied strain gradually increased (40–80%), the relative resistance change slowly increased. Because the number of contacts between the conductive skeletons of GO/PPy was gradually saturated, the contact area between the conductive skeletons became the dominant factor for the resistance change (
Figure 4e). A gauge factor (GF) was calculated, which was defined as the ratio of relative resistance change (ΔR/R
0) to strain to evaluate the sensitivity of the GO/PPy@PU conductive sponge to the applied strain. The GF of the 0–40% strain stage was 2.1. The average GF value of the 40–80% strain stage was reduced to 0.5. These data indicated that GO/PPy@PU conductive sponges had higher sensitivity to strain in low strain regions (0–40%).
Figure 5c shows the performance of different samples with two dipping coatings. Samples made in different batches showed essentially the same response to pressure, reflecting a good repeatability in the manufacturing process.
Substituting Equation (1) into Equation (7), we have
which reveals the relationship between relative resistance change and pressure.
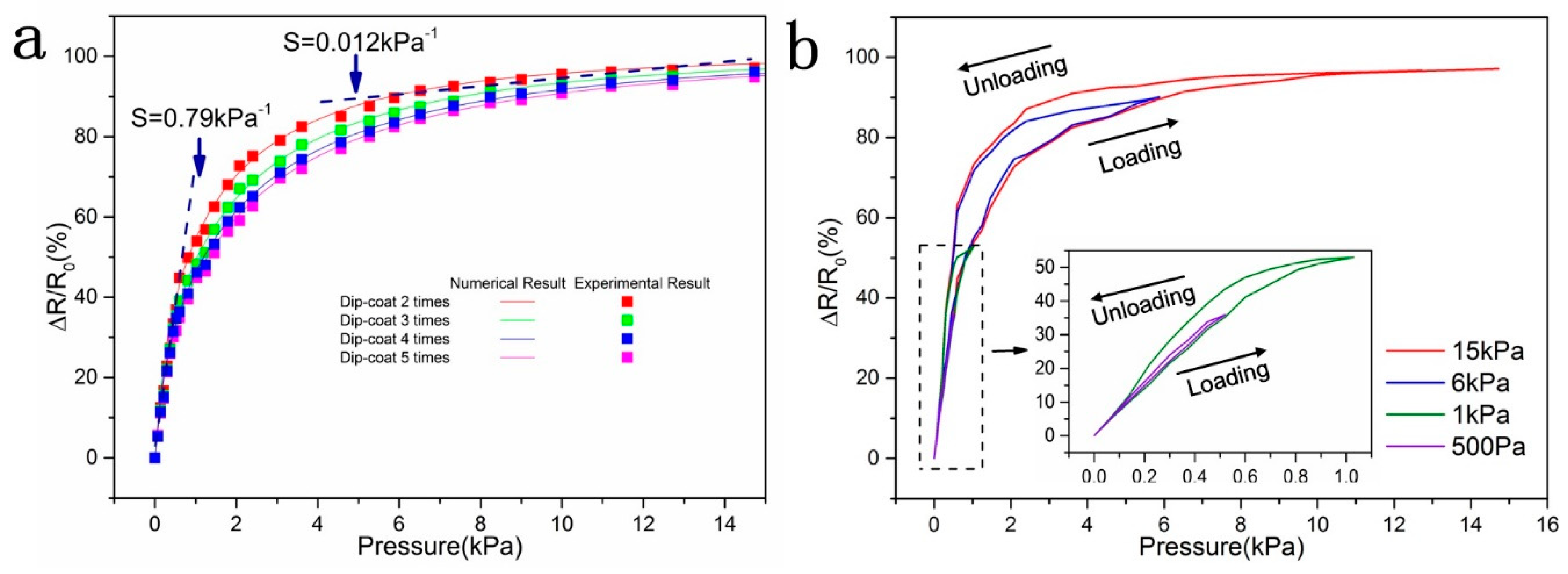
Figure 6a shows the theoretical prediction curves and experimental results under different dipping times. The pressure sensitivity S was be defined as the slope of curves in
Figure 6a (S = δ(ΔR/R
0)/δP, where P denoted the applied pressure). The study found that the number of dipping coatings affected the piezoresistive properties of the sensors. As the number of dipping coatings increased, the pressure sensitivity of the sponge sensor increased first and then decreased. It was worth noting that the pressure response behavior of GO/PPy@PU conductive sponge could be divided into two stages. When the pressure was less than 2.5 kPa, ΔR/R
0 increases rapidly with increasing strain, showing a sensitivity to pressure of 0.79 kPa
−1. In this region, the increase of the number of contacts and the contact area of the GO/PPy conductive skeleton played a decisive role in the resistance change. Moreover, as mentioned above, due to the special structure of the sponge, GO/PPy@PU conductive sponge had less deformation resistance when the compression strain is less than 40%, which also increases the sensitivity of the GO/PPy@PU conductive sponge to pressure at small strains. However, when the pressure exceeded 2.5 kPa, the contact area between the GO/PPy conductive skeletons became the dominant factor, and at this stage, the deformation resistance of the GO/PPy@PU conductive sponge also increased significantly, the sensitivity to pressure decreased to 0.012 kPa
−1.
It can be demonstrated from the Equation (8) that the larger m, the higher the sensitivity of the conductive sponge to pressure. With two dipping coatings, the minimum number of composite conductive layers deposited on the sponge resulted in a small volume of conductive fibers, a small , and a large , resulting in maximum m (m = 0.05). The GO/PPy composite conductive layers had a fragmental rough structure. Compared with other conductive fillers with smooth surfaces such as graphene, when the conductive fiber diameter is same, the GO/PPy composite conductive layers have a smaller volume and is larger, resulting in a larger m.
Otherwise, it can be demonstrated from the Equation (8) that the larger t, the higher the sensitivity of the conductive sponge to pressure. Previous studies have proved that the larger the aspect ratio of the conductive material, the higher the t value [
28]. Lower dipping times lead to lower GO/PPy composite conductive layers thickness, larger conductive fiber aspect ratio, and a higher t value. When dipping coating two layers, t = 2. When the number of dipping coatings is five, t = 1.3. In summary, the conductive sponge has the highest sensitivity to pressure with two dipping coatings. The resistance was unstable due to the uneven distribution of the conductive layers with one dipping coating. Therefore, the subsequent experiments were under two dipping coating conditions.
The GO/PPy sponge sensor with two dipping coatings was preferred.
Figure 6b illustrates the hysteresis curves for the GO/PPy sponge sensor. For small pressure such as 500 Pa, the relative resistance change overlapped with that in the load-unload cycle for the sample, indicating a small hysteresis in the response. For a larger pressure such as 15 kPa, there existed a relatively large hysteresis in the response.
was used to represent the hysteresis of the sensor, which could be expressed by Equation (9).
where
represents the maximum difference of the relative resistance change on the cyclic curves under the same pressure.
is the maximum relative resistance change. When the pressure was 15 kPa, the hysteresis of the sensor was the largest,
was 12.4%.
3.5. Motion Monitoring
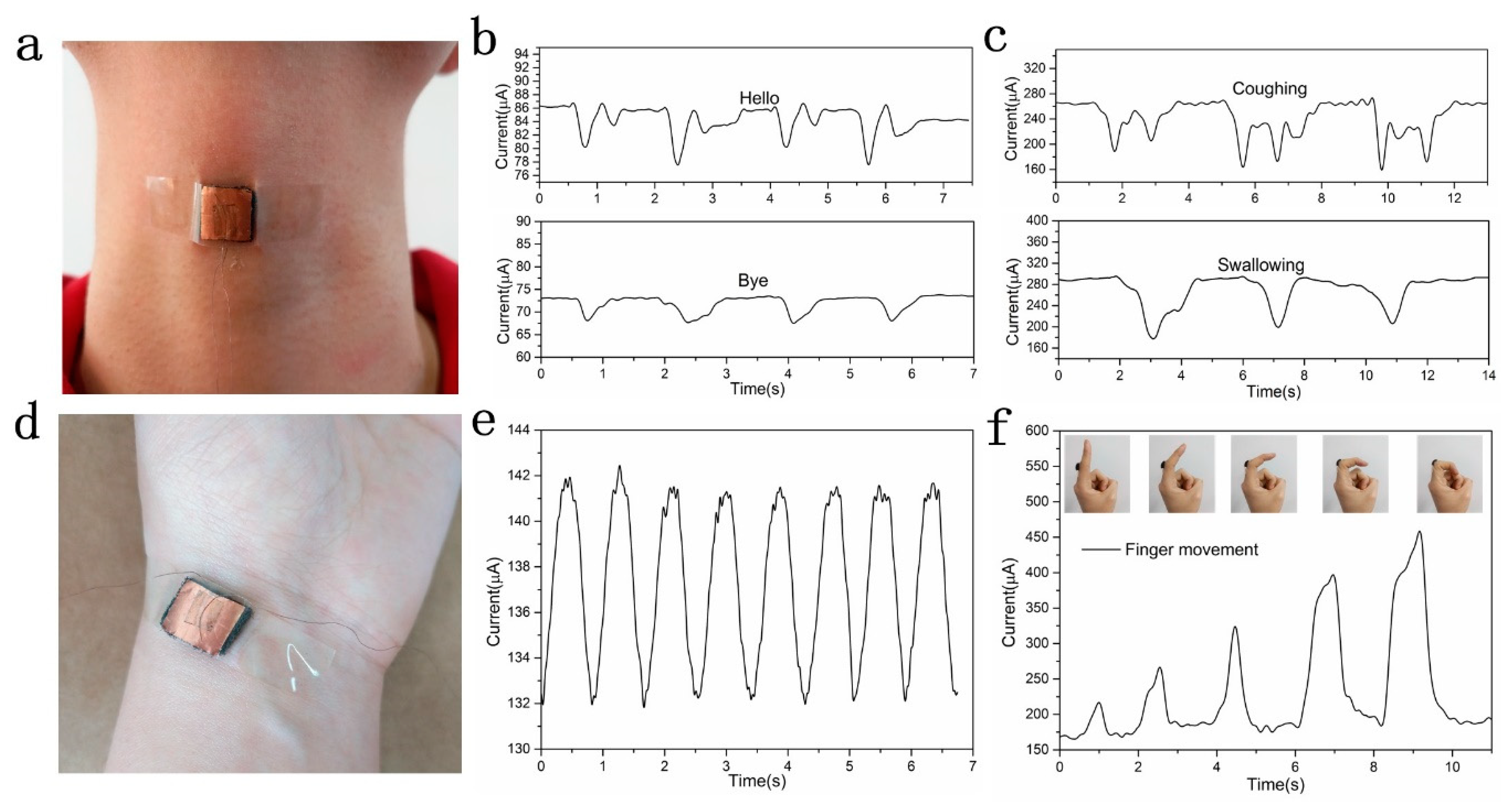
We evaluated the ability of the GO/PPy@PU sponge sensor to monitor small-scale human activities. First, connected the GO/PPy@PU sensor to the throat to record the current signal when the tester speaks different words (for example, say hello, goodbye) (
Figure 8a). As shown in
Figure 8b, nearly the same characteristic current curves were produced when the same word was repeated, indicating the excellent stability of the sensor. In addition, when different words were pronounced, the characteristic current curves changed because each word caused a different vibration of the throat muscles. Significant differences between characteristic current signals indicated excellent recognition performance of sponge sensors. When the tester swallowed saliva and coughed, the sensor could still provide corresponding characteristic current signal, as shown in
Figure 8c. These characteristic current signals allowed people to distinguish vibration near the throat. Then, we fixed the GO/PPy@PU sponge sensor to the tester’s wrist to record the characteristic current curve of the human pulse (
Figure 8d). It could be seen in the
Figure 8e that the pulse frequency was approximately 72 times/min.
To further test the performance of the sponge sensor for large deformation motion detection, the GO/PPy@PU sponge sensor was fixed to the joint of the index finger to test the bending of the finger joint with different degrees. The characteristic current signals of the GO/PPy@PU sponge sensor in different degrees of bend-release motions were recorded, as shown in
Figure 8f. It could be observed that as the degree of bending of the finger gradually increased, the peak value of the characteristic current signal also increased. During the bending release phase, the steady value of the current also increased slightly. This could be attributed to the fact that the sensor produced compression deformation with the bending of the finger, and the greater the bending amplitude, the greater the compression deformation of the sponge. On the other hand, the increase in current value during the bending release phase was due to an incomplete recovery of the compressive strain in the central region of the sponge sensor. The compressive strain generated by the sensor during the bending process of the finger was not uniform, and the compressive strain in the central region was larger than that of the edge portion. Therefore, the strain recovery in the central region was likely to be incomplete during the recovery process, resulting in a small increase in the current during the bending release phase. The results show that the sensor can monitor and distinguish some of the physiological activities of humans, demonstrating its potential in motion monitoring.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







