Multifunctional Ultrahigh Sensitive Microwave Planar Sensor to Monitor Mechanical Motion: Rotation, Displacement, and Stretch



Abstract
1. Introduction
2. Materials and Methods
3. Analysis
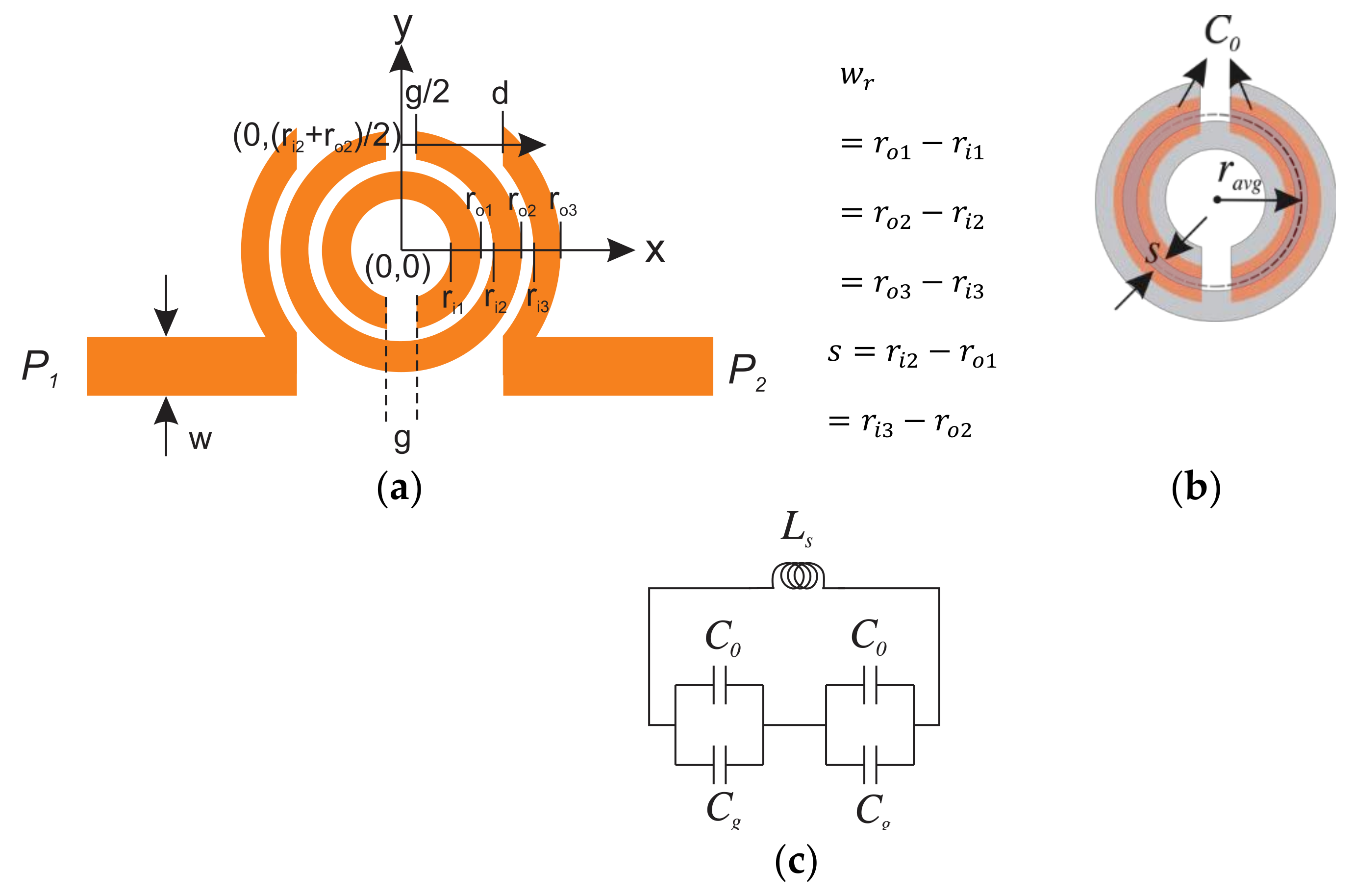
3.1. Generic Description
3.2. Circuit Model Parameter Extraction
- Equation for Cs
- Equation for Ls
- Equation for Cp:
- First Equation for Cc, and L
- Second Equation for Cc and L
3.3. Stacked Resonator
4. Simulation and Measurement
4.1. Vertical Separation
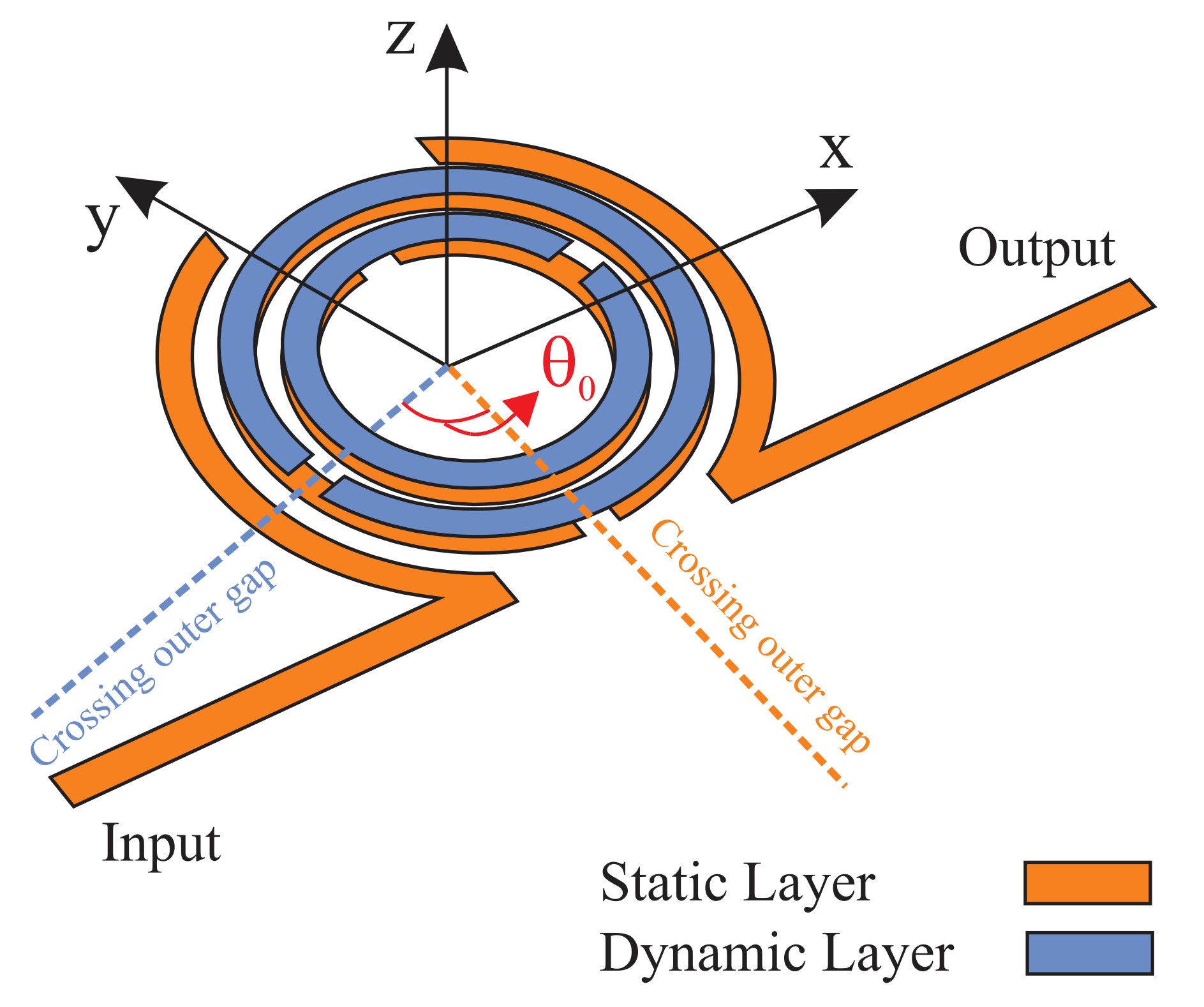
4.2. Rotation Analysis with Skew Angle
4.3. Rotation Sensing With Wide Dynamic Range
4.4. Horizontal Displacement
4.5. Strain Sensing
4.6. Comparison of the Reported Literature
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abdolrazzaghi, M.; Daneshmand, M.; Iyer, A.K. Strongly Enhanced Sensitivity in Planar Microwave Sensors Based on Metamaterial Coupling. IEEE Trans. Microwave Theory Tech. 2018, 66, 1843–1855. [Google Scholar] [CrossRef]
- Reyes-Vera, E.; Acevedo-Osorio, G.; Arias-Correa, M.; Senior, D.E. A Submersible Printed Sensor Based on a Monopole-Coupled Split Ring Resonator for Permittivity Characterization. Sensors 2019, 19, 1936. [Google Scholar] [CrossRef]
- Mehrotra, P.; Chatterjee, B.; Sen, S. EM-wave biosensors: A review of RF, microwave, mm-wave and optical sensing. Sensors 2019, 19, 1013. [Google Scholar] [CrossRef]
- Sharafadinzadeh, N.; Abdolrazzaghi, M.; Daneshmand, M. Investigation on planar microwave sensors with enhanced sensitivity from microfluidic integration. Sens. Actuators A 2020, 301, 111752. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Khan, S.; Daneshmand, M. A Dual-Mode Split-Ring Resonator to Eliminate Relative Humidity Impact. IEEE Microwave Wireless Compon. Lett. 2018, 28, 939–941. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Scott, J.; Ghorbani, K. Dual-Mode Resonator for Simultaneous Permittivity and Thickness Measurement of Dielectrics. IEEE Sens. J. 2020, 20, 185–192. [Google Scholar] [CrossRef]
- Withayachumnankul, W.; Jaruwongrungsee, K.; Fumeaux, C.; Abbott, D. Metamaterial-Inspired Multichannel Thin-Film Sensor. IEEE Sens. J. 2012, 12, 1455–1458. [Google Scholar] [CrossRef]
- Albishi, A.M.; Boybay, M.S.; Ramahi, O.M. Complementary Split-Ring Resonator for Crack Detection in Metallic Surfaces. IEEE Microwave Wireless Compon. Lett. 2012, 22, 330–332. [Google Scholar] [CrossRef]
- Schueler, M.; Mandel, C.; Puentes, M.; Jakoby, R. Metamaterial Inspired Microwave Sensors. IEEE Microwave Mag. 2012, 13, 57–68. [Google Scholar] [CrossRef]
- Alù, A.; Engheta, N. Dielectric sensing in ϵ -near-zero narrow waveguide channels. Phys. Rev. B 2008, 78, 045102. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Withayachumnankul, W.; Al-Sarawi, S.; Abbott, D. High-Sensitivity Metamaterial-Inspired Sensor for Microfluidic Dielectric Characterization. IEEE Sens. J. 2014, 14, 1345–1351. [Google Scholar] [CrossRef]
- Withayachumnankul, W.; Jaruwongrungsee, K.; Tuantranont, A.; Fumeaux, C.; Abbott, D. Metamaterial-based microfluidic sensor for dielectric characterization. Sens. Actuators A 2013, 189, 233–237. [Google Scholar] [CrossRef]
- Sreekanth, K.V.; Alapan, Y.; ElKabbash, M.; Ilker, E.; Hinczewski, M.; Gurkan, U.A.; De Luca, A.; Strangi, G. Extreme sensitivity biosensing platform based on hyperbolic metamaterials. Nat. Mater. 2016, 15, 621–627. [Google Scholar] [CrossRef]
- Wang, S.; Xia, L.; Mao, H.; Jiang, X.; Yan, S.; Wang, H.; Wei, D.; Cui, H.; Du, C. Terahertz biosensing based on a polarization-insensitive metamaterial. IEEE Photon. Technol. Lett. 2016, 28, 986–989. [Google Scholar] [CrossRef]
- Isakov, D.; Stevens, C.J.; Castles, F.; Grant, P.S. A Split Ring Resonator Dielectric Probe for Near-Field Dielectric Imaging. Sci. Rep. 2017, 7, 1–9. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Scott, J.; Ghorbani, K. Differential Sensors Using Microstrip Lines Loaded with Two Split Ring Resonators. IEEE Sens. J. 2018, 18, 5786–5793. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Daneshmand, M. A Phase-Noise Reduced Microwave Oscillator Sensor With Enhanced Limit of Detection Using Active Filter. IEEE Microw. Wireless Compon. Lett. 2018, 28, 837–839. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Zarifi, M.H.; Daneshmand, M. Wireless Communication in Feedback-Assisted Active Sensors. IEEE Sens. J. 2016, 16, 8151–8157. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Zarifi, M.H.; Pedrycz, W.; Daneshmand, M. Robust Ultra-High Resolution Microwave Planar Sensor Using Fuzzy Neural Network Approach. IEEE Sens. J. 2017, 17, 323–332. [Google Scholar] [CrossRef]
- Sekar, V.; Torke, W.J.; Palermo, S.; Entesari, K. A Self-Sustained Microwave System for Dielectric-Constant Measurement of Lossy Organic Liquids. IEEE Trans. Microw. Theory Tech. 2012, 60, 1444–1455. [Google Scholar] [CrossRef]
- Alotaibi, S.A.; Cui, Y.; Tentzeris, M.M. CSRR Based Sensors for Relative Permittivity Measurement with Improved and Uniform Sensitivity throughout [0.9–10.9] GHz Band. IEEE Sens. J. 2019, 1, 1. [Google Scholar] [CrossRef]
- Yu, H.; Wang, C.; Meng, F.Y.; Liang, J.G.; Kashan, H.S.; Adhikari, K.K.; Wang, L.; Kim, E.S.; Kim, N.Y. Design and analysis of ultrafast and high-sensitivity microwave transduction humidity sensor based on belt-shaped MoO3 nanomaterial. Sens. Actuators B 2020, 304, 127138. [Google Scholar] [CrossRef]
- Zarifi, M.H.; Rahimi, M.; Daneshmand, M.; Thundat, T. Microwave ring resonator-based non-contact interface sensor for oil sands applications. Sens. Actuators B 2016, 224, 632–639. [Google Scholar] [CrossRef]
- Zarifi, M.H.; Farsinezhad, S.; Wiltshire, B.D.; Abdorrazaghi, M.; Mahdi, N.; Kar, P.; Daneshmand, M.; Shankar, K. Effect of phosphonate monolayer adsorbate on the microwave photoresponse of TiO 2 nanotube membranes mounted on a planar double ring resonator. Nanotechnology 2016, 27, 375201. [Google Scholar] [CrossRef]
- Rettig, F.; Moos, R. Semiconducting direct thermoelectric gas sensors. In Semiconductor Gas Sensors; Elsevier: Amsterdam, The Netherlands, 2013; pp. 261–296. ISBN 9780857092366. [Google Scholar]
- Bailly, G.; Harrabi, A.; Rossignol, J.; Domenichini, B.; Bellat, J.P.; Bezverkhyy, I.; Pribetich, P.; Stuerga, D. Influence of the Design in Microwave-based Gas Sensors: Ammonia Detection with Titania Nanoparticles. Procedia Eng. 2016, 168, 264–267. [Google Scholar] [CrossRef]
- Melik, R.; Unal, E.; Perkgoz, N.K.; Puttlitz, C.; Demir, H.V. Metamaterial-based wireless strain sensors. Appl. Phys. Lett. 2009, 95, 011106. [Google Scholar] [CrossRef]
- Melik, R.; Unal, E.; Kosku Perkgoz, N.; Puttlitz, C.; Demir, H.V. Flexible metamaterials for wireless strain sensing. Appl. Phys. Lett. 2009, 95, 181105. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Daneshmand, M. Dual Active Resonator for Dispersion Coefficient Measurement of Asphaltene Nano-Particles. IEEE Sens. J. 2017, 17, 7248–7256. [Google Scholar] [CrossRef]
- Abdolrazzaghi, M.; Kazemi, N.; Daneshmand, M. Sensitive Spectroscopy Using DSRR Array and Linvill Negative Impedance. In Proceedings of the 2019 IEEE MTT-S International Microwave Symposium (IMS), Boston, MA, USA, 2–7 June 2019. [Google Scholar]
- Abdolrazzaghi, M.; Hariri, F.; Chu, M.; Naguib, H.; Daneshmand, M. Relative Humidity Sensing using PANI/PVA integrated with Feedback Oscillator Circuit. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019. [Google Scholar]
- Abdolrazzaghi, M.; Daneshmand, M. A 4 GHz Near-Field Monitoring Planar Oscillator Sensor. In Proceedings of the 2018 IEEE MTT-S International Microwave Workshop Series on Advanced Materials and Processes for RF and THz Applications (IMWS-AMP), Ann Arbor, MI, USA, 16–18 July 2018. [Google Scholar]
- Ebrahimi, A.; Shen, Z.; Withayachumnankul, W.; Al-Sarawi, S.F.; Abbott, D. Varactor-Tunable Second-Order Bandpass Frequency-Selective Surface With Embedded Bias Network. IEEE Trans. Antennas Propag. 2016, 64, 1672–1680. [Google Scholar] [CrossRef]
- Lai, A.; Caloz, C.; Itoh, T. Composite right/left-handed transmission line metamaterials. IEEE Microw. Mag. 2004, 5, 34–50. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Green, T.C.; Yeatman, E.M.; Holmes, A.S. Architectures for Vibration-Driven Micropower Generators. J. Microelectromech. Syst. 2004, 13, 429–440. [Google Scholar] [CrossRef]
- Yeatman, E.M. Energy harvesting from motion using rotating and gyroscopic proof masses. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2008, 222, 27–36. [Google Scholar] [CrossRef]
- Martín, F.; Herrojo, C.; Mata-Contreras, J.; Paredes, F. Time-Domain Signature Barcodes for Chipless-RFID and Sensing Applications; Springer: Berlin, Germany; Available online: https://link.springer.com/book/10.1007%2F978-3-030-39726-5 (accessed on 18 February 2020).
- Devaraj, H.; Giffney, T.; Petit, A.; Assadian, M.; Aw, K. The development of highly flexible stretch sensors for a Robotic Hand. Robotics 2018, 7, 54. [Google Scholar] [CrossRef]
- Jia, Y.; Do, C.D.; Zou, X.; Seshia, A.A. A Hybrid Vibration Powered Microelectromechanical Strain Gauge. IEEE Sens. J. 2015, 16, 235–241. [Google Scholar] [CrossRef]
- Do, C.D.; Erbes, A.; Yan, J.; Soga, K.; Seshia, A.A. Vacuum Packaged Low-Power Resonant MEMS Strain Sensor. J. Microelectromech. Syst. 2016, 25, 851–858. [Google Scholar] [CrossRef]
- Zang, Y.; Zhang, F.; Di, C.A.; Zhu, D. Advances of flexible pressure sensors toward artificial intelligence and health care applications. Mater. Horiz. 2015, 2, 140–156. [Google Scholar] [CrossRef]
- Xie, M.; Hisano, K.; Zhu, M.; Toyoshi, T.; Pan, M.; Okada, S.; Tsutsumi, O.; Kawamura, S.; Bowen, C. Flexible Multifunctional Sensors for Wearable and Robotic Applications. Adv. Mater. Technol. 2019, 4, 1800626. [Google Scholar] [CrossRef]
- Naqui, J.; Durán-Sindreu, M.; Martín, F. Novel sensors based on the symmetry properties of split ring resonators (SRRs). Sensors 2011, 11, 7545–7553. [Google Scholar] [CrossRef]
- Naqui, J.; Durán-Sindreu, M.; Martín, F. Alignment and Position Sensors Based on Split Ring Resonators. Sensors 2012, 12, 11790–11797. [Google Scholar] [CrossRef]
- Horestani, A.K.; Fumeaux, C.; Al-Sarawi, S.F.; Abbott, D. Displacement Sensor Based on Diamond-Shaped Tapered Split Ring Resonator. IEEE Sens. J. 2013, 13, 1153–1160. [Google Scholar] [CrossRef]
- Naqui, J.; Coromina, J.; Karami-Horestani, A.; Fumeaux, C.; Martín, F. Angular Displacement and Velocity Sensors Based on Coplanar Waveguides (CPWs) Loaded with S-Shaped Split Ring Resonators (S-SRR). Sensors 2015, 15, 9628–9650. [Google Scholar] [CrossRef]
- Eom, S.; Lim, S. Stretchable Complementary Split Ring Resonator (CSRR)-Based Radio Frequency (RF) Sensor for Strain Direction and Level Detection. Sensors 2016, 16, 1667. [Google Scholar] [CrossRef]
- Saha, C.; Siddiqui, J.Y. Theoretical Model for Estimation of Resonance Frequency of Rotational Circular Split-Ring Resonators. Electromagnetics 2012, 32, 345–355. [Google Scholar] [CrossRef]
- Bahl, I.J.; Bhartia, P. Microwave solid state circuit design; Wiley-Interscience Hoboken; Wiley-Interscience: Hoboken, NJ, USA; Available online: https://scholar.google.com/scholar?hl=zh-CN&as_sdt=0%2C5&q=Microwave+solid+state+circuit+design&btnG= (accessed on 18 February 2020).
- Terman, F.E. Radio Engineer’s Handbook; McGraw-Hill Book Company, Inc.: New York, NY, USA, 1943; Volume 645. [Google Scholar]
- Fenwick, R. A new class of electrically small antennas. IEEE Trans. Antennas Propag. 1965, 13, 379–383. [Google Scholar] [CrossRef]
- Aznar, F.; Gil, M.; Bonache, J.; Jelinek, L.; Baena, J.D.; Marqués, R.; Martín, F. Characterization of miniaturized metamaterial resonators coupled to planar transmission lines through parameter extraction. J. Appl. Phys. 2008, 104, 114501. [Google Scholar] [CrossRef]
- Tian, Y.; Wu, J.; Yu, L.; Yang, H.; Huang, X. Ultrasensitive displacement sensor based on tunable horn-shaped resonators. Smart Mater. Struct. 2018, 27, 045013. [Google Scholar] [CrossRef]
- Horestani, A.K.; Abbott, D.; Fumeaux, C. Rotation Sensor Based on Horn-Shaped Split Ring Resonator. IEEE Sens. J. 2013, 13, 3014–3015. [Google Scholar] [CrossRef]
- Horestani, A.K.; Naqui, J.; Shaterian, Z.; Abbott, D.; Fumeaux, C.; Martín, F. Two-dimensional alignment and displacement sensor based on movable broadside-coupled split ring resonators. Sens. Actuators A Phys. 2014, 210, 18–24. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L (nH) | C (pF) | Cc (fF) | Ls (nH) | Cs (pF) | |
|---|---|---|---|---|---|
| Single DSRR | 2.94 | 0.3 | 21 | 2.72 | 0.3 |
| Stacked DSRR | 2.94 | 0.8 | 23 | 4.3 | 1.63 |
| . | Type | Freq. (GHz) | Size () | Disp. | Rotation () | Stretch (s) | ||||
| Range | Range | Range | ||||||||
| [53] | Horn-Shaped | 7 | 300‡ | 5.75.7 | 1–5 | 207 | - | - | - | - |
| [54] | SRR | 1.38 | NA | 1.751.08 | - | - | 0–8 | 1.87 | - | - |
| [45] | SRR | 1.13 | 19‡ | 0.130.13 | 1.1 | 22.7 | 0 | - | - | - |
| [44] | SRR | 2.2–3.7 | 51‡ | 0.280.35* | 0.3 | 65 | 0 | - | - | - |
| [46] | SRR | 1 | 129 | 0.080.08 | - | - | 0–90 | 0.25 | - | - |
| [47] | CSRR | 2.03–3.63 | 4.5-4.8 | 2.53.5* | - | - | - | - | 2.5–25 | 24 |
| [55] | SRR | 2.05–2.5 | 100‡ | 6.167.2* | 0.5-3 | 108 | - | - | - | - |
| This Work | DSRR | 5.2 | 226 | 0.130.13 | 5 | 500 | 0–180 | 4.5 | 0–30 | 12 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdolrazzaghi, M.; Daneshmand, M. Multifunctional Ultrahigh Sensitive Microwave Planar Sensor to Monitor Mechanical Motion: Rotation, Displacement, and Stretch. Sensors 2020, 20, 1184. https://doi.org/10.3390/s20041184
Abdolrazzaghi M, Daneshmand M. Multifunctional Ultrahigh Sensitive Microwave Planar Sensor to Monitor Mechanical Motion: Rotation, Displacement, and Stretch. Sensors. 2020; 20(4):1184. https://doi.org/10.3390/s20041184
Chicago/Turabian StyleAbdolrazzaghi, Mohammad, and Mojgan Daneshmand. 2020. "Multifunctional Ultrahigh Sensitive Microwave Planar Sensor to Monitor Mechanical Motion: Rotation, Displacement, and Stretch" Sensors 20, no. 4: 1184. https://doi.org/10.3390/s20041184
APA StyleAbdolrazzaghi, M., & Daneshmand, M. (2020). Multifunctional Ultrahigh Sensitive Microwave Planar Sensor to Monitor Mechanical Motion: Rotation, Displacement, and Stretch. Sensors, 20(4), 1184. https://doi.org/10.3390/s20041184