Avoiding 3D Obstacles in Mixed Reality: Does It Differ from Negotiating Real Obstacles?




Abstract
1. Introduction
2. Experiment 1: Comparing Holographic to Real Obstacle Avoidance
2.1. Materials and Methods
2.1.1. Participants
2.1.2. Ethics Statement
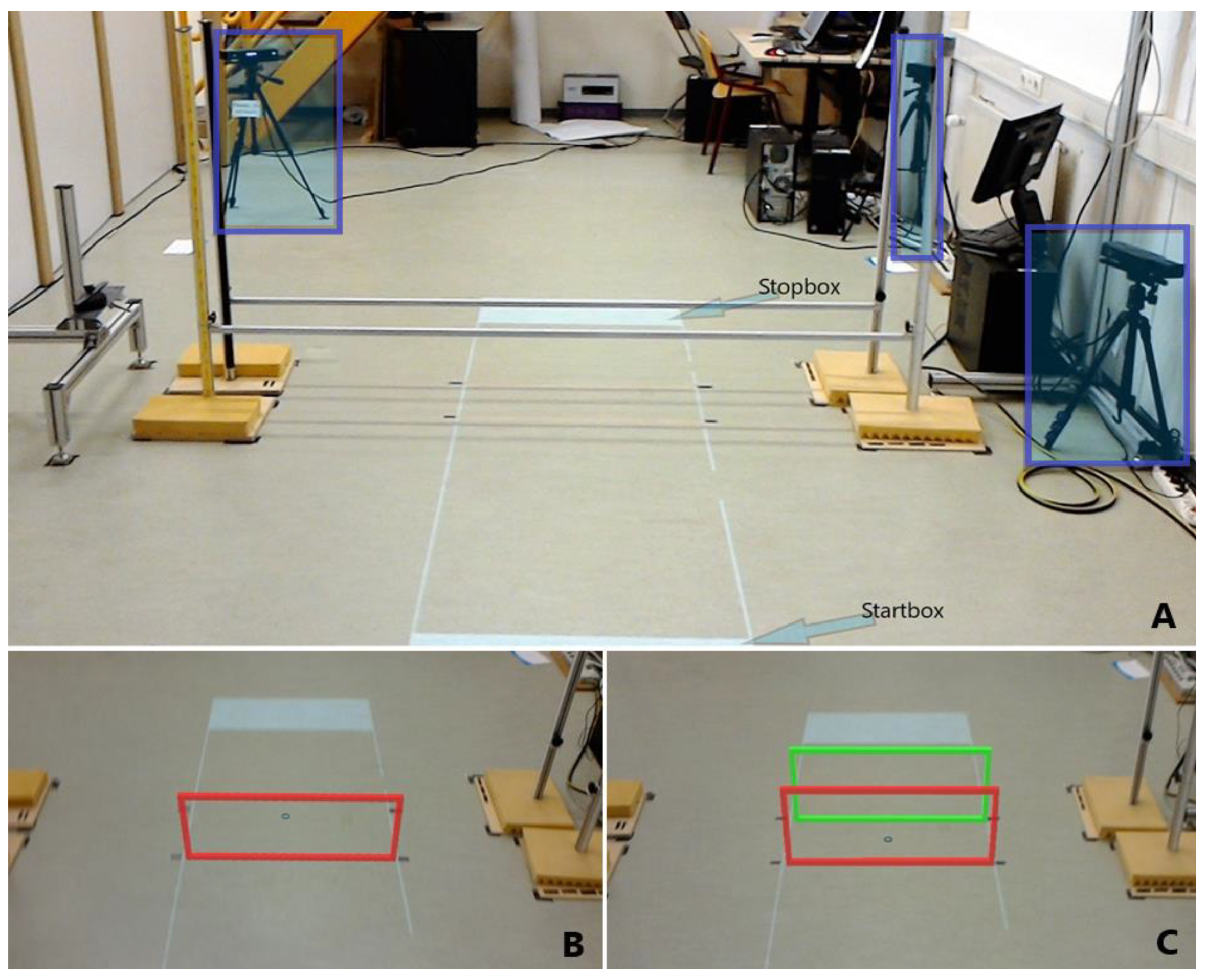
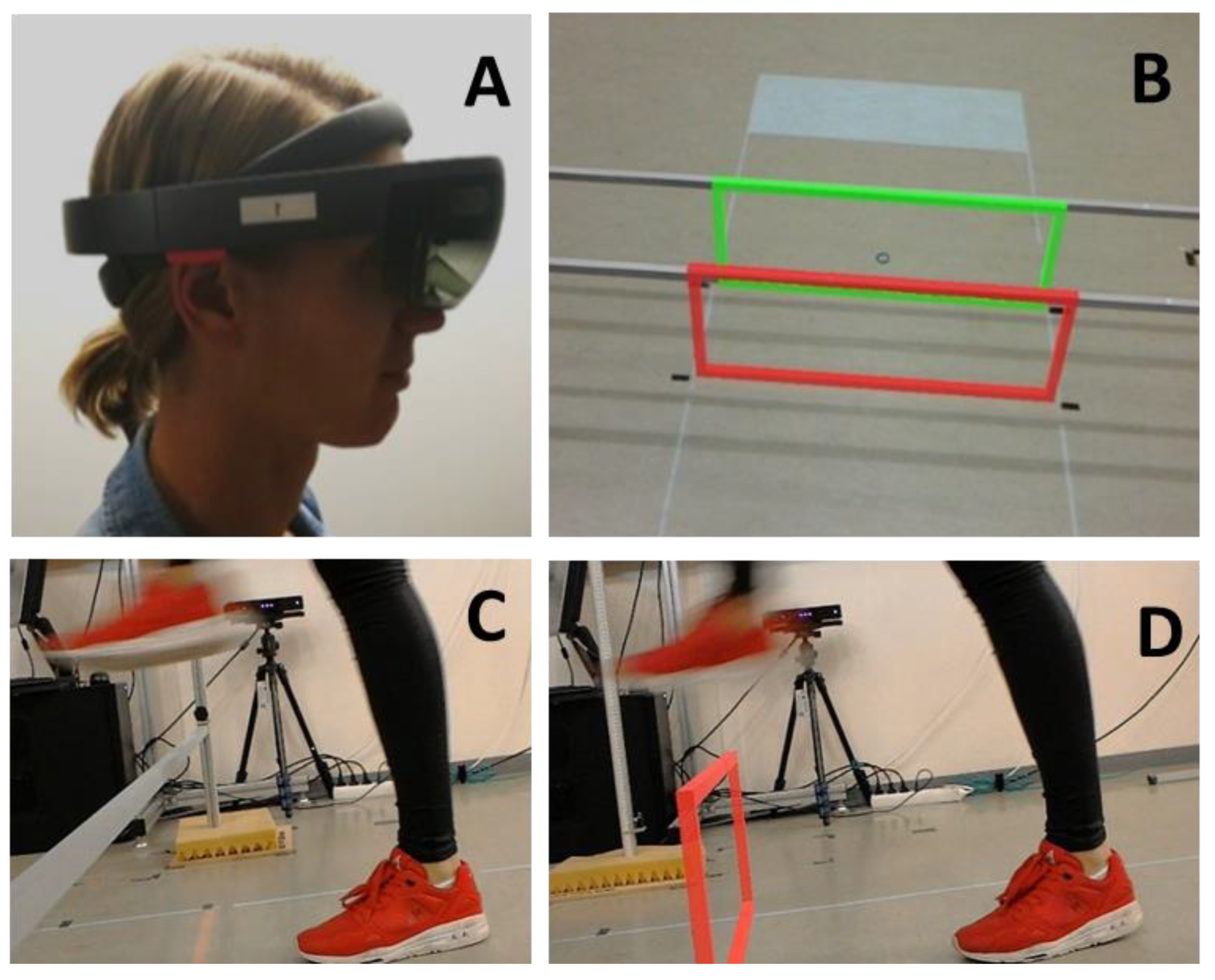
2.1.3. Experimental Setup and Design
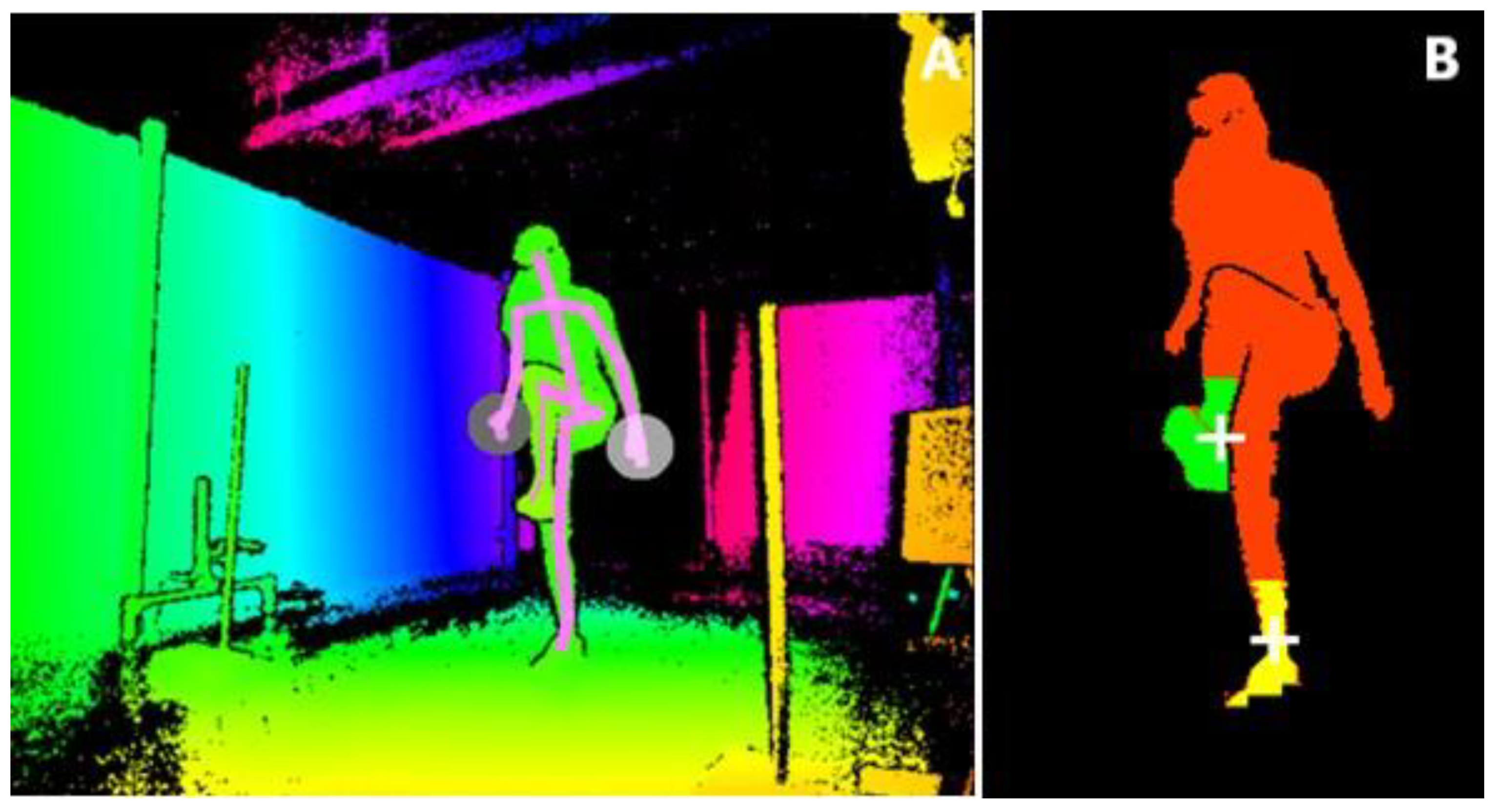
2.1.4. Data Pre-Processing and Analyses
2.1.5. Statistical Analysis
2.2. Results
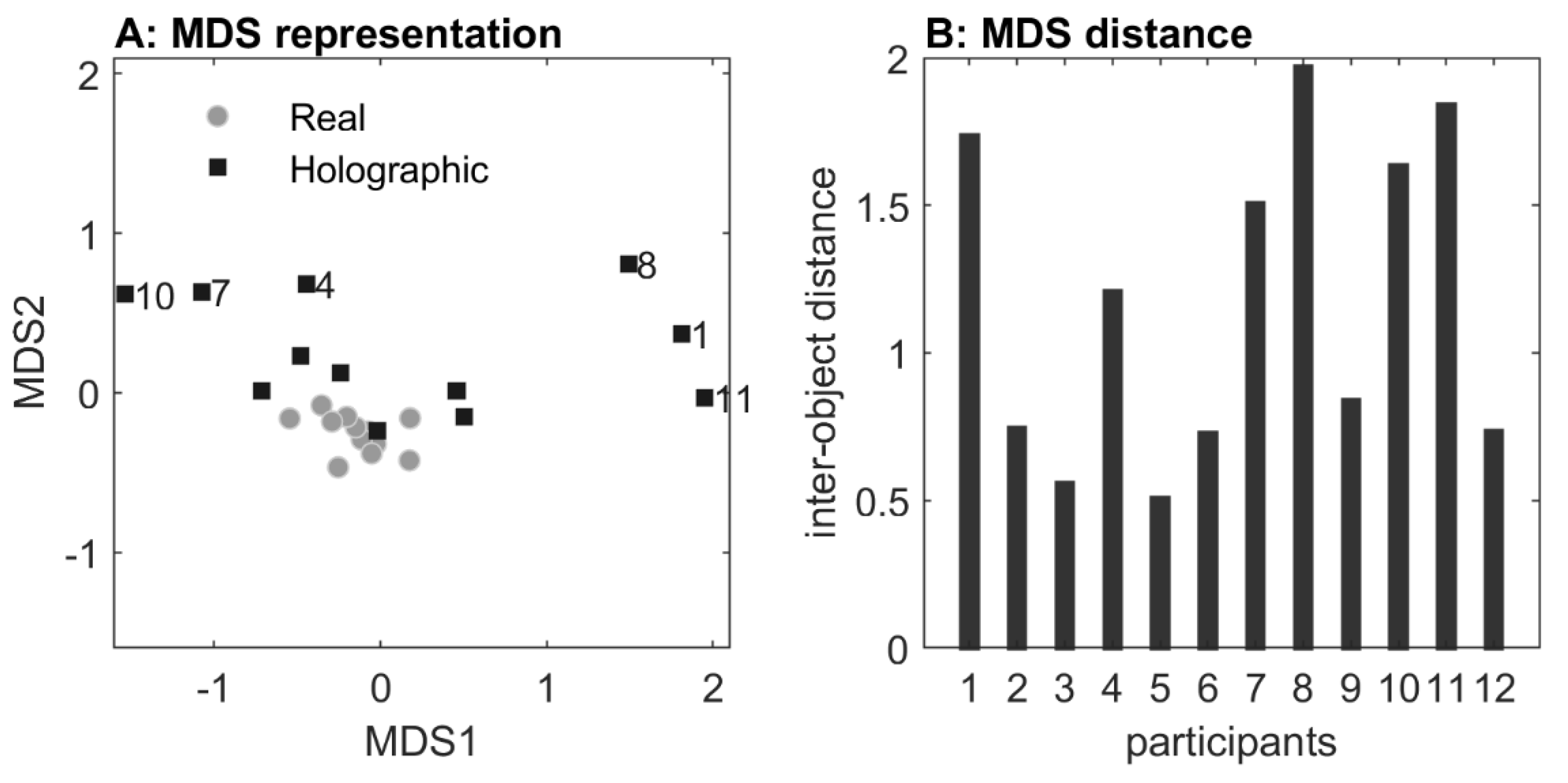
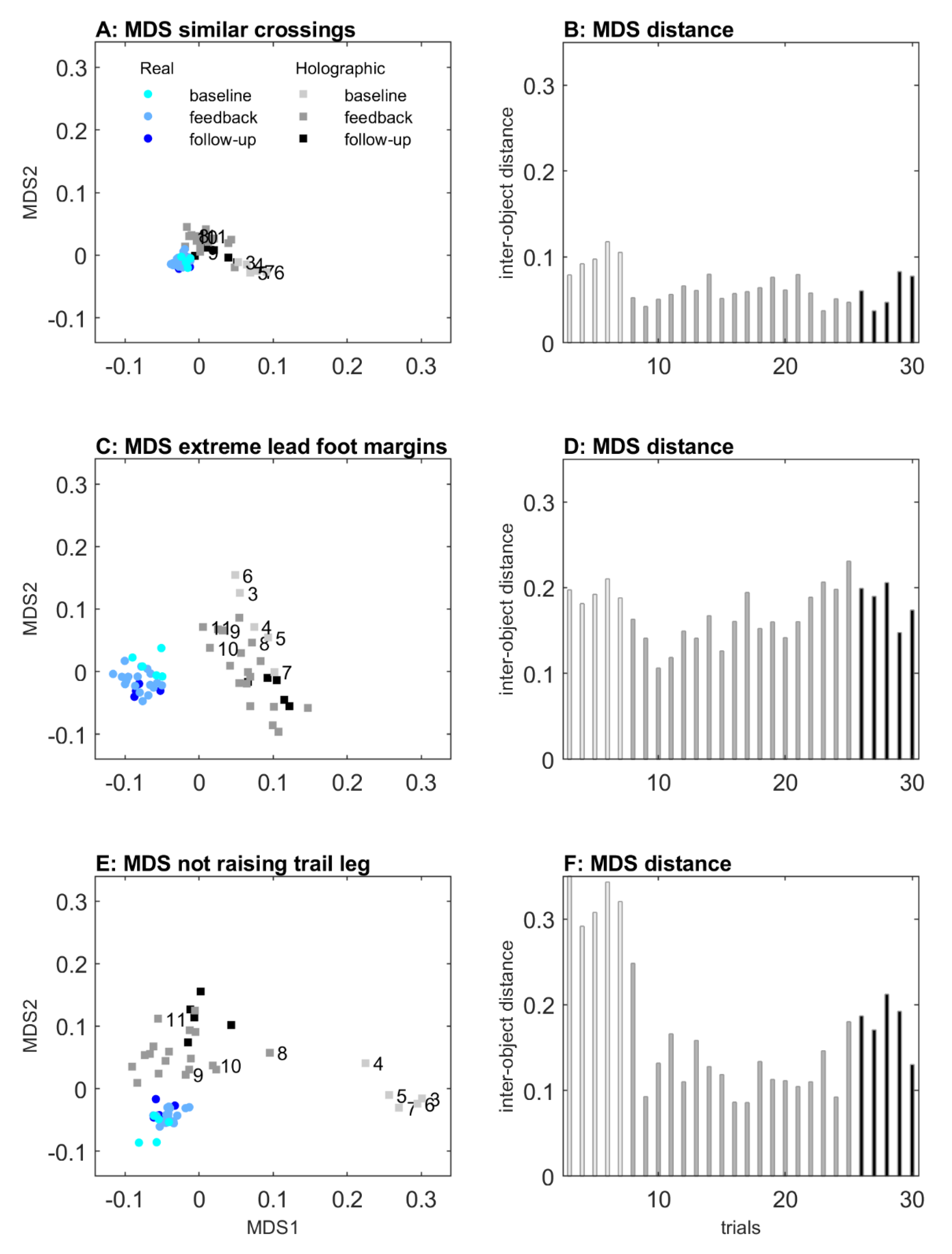
2.2.1. Multidimensional Scaling: Visualizing the Effect of Obstacle Type
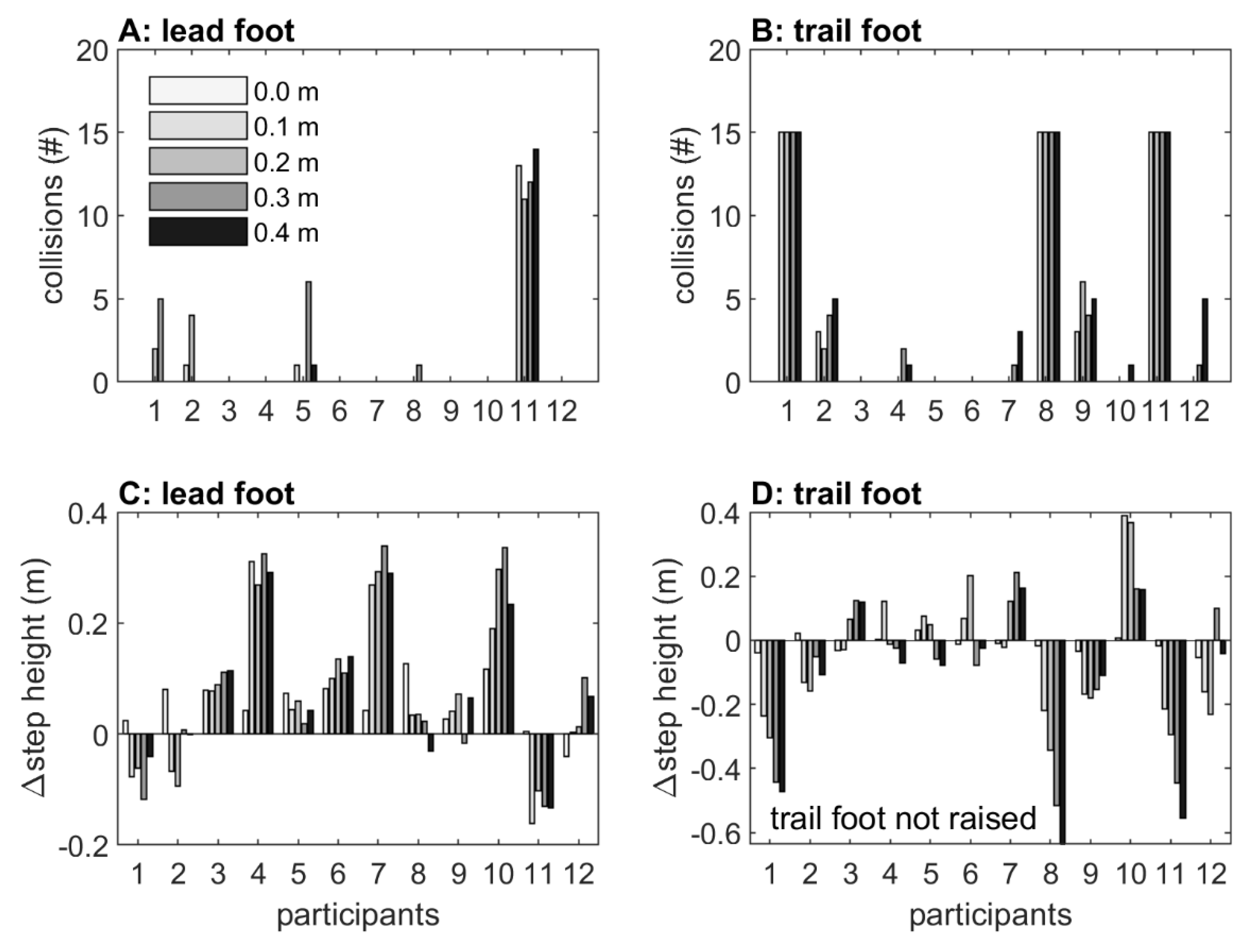
2.2.2. Collisions
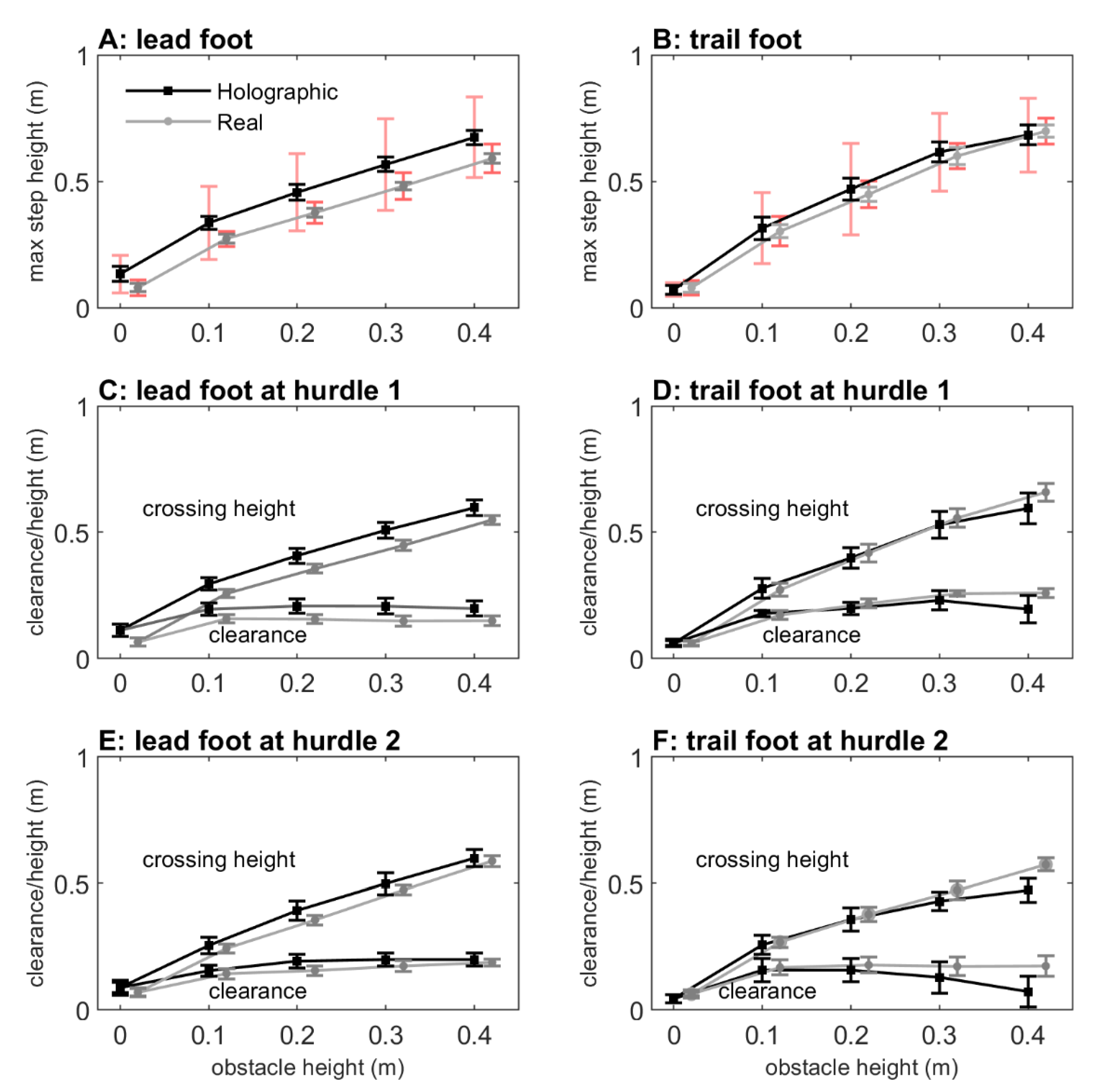
2.2.3. Maximum Step Height
2.2.4. Crossing Height and Clearance above Hurdle 1
2.2.5. Crossing Height and Clearance above Hurdle 2
2.2.6. Mean Forward Velocity
2.3. Discussion
3. Experiment 2: Mixed-Reality Video Feedback for Altering Avoidance Maneuvers
3.1. Materials and Methods
3.2. Results
3.2.1. Multidimensional Scaling: Visualizing the Effect of Feedback for Real and Holographic Obstacles
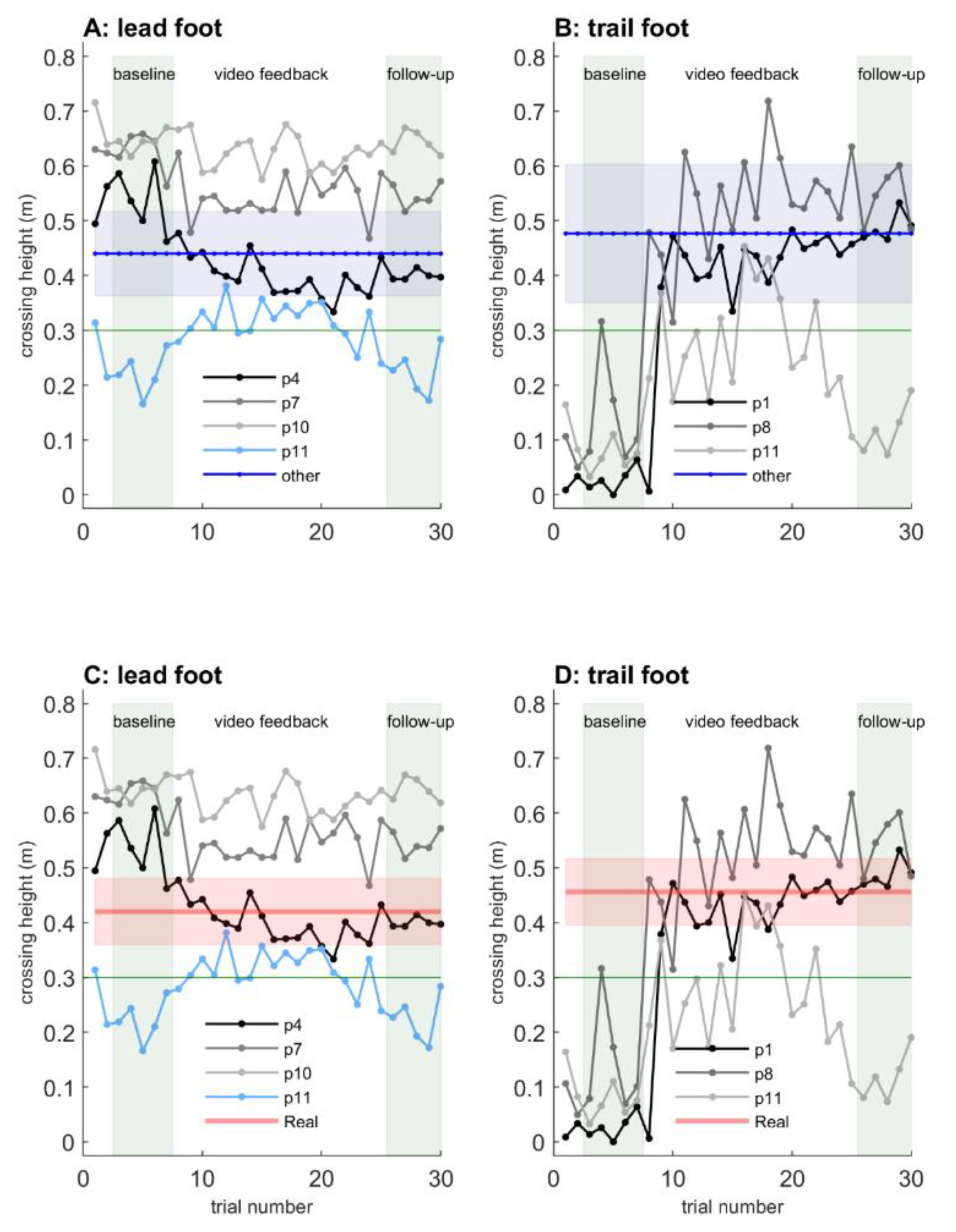
3.2.2. Crossing Heights: the Effect of Mixed-Reality Video Feedback
3.2.3. Questionnaire: User Comfort, Realism of Holographic Obstacles, and Perceived Usefulness of the Mixed-Reality Video Feedback
3.3. Discussion
4. General Discussion
4.1. Limited Augmentable FOV Hampers Visual Information of the Obstacle during Obstacle Crossing
4.2. Human-Factor Aspects May Influence Holographic Obstacle Avoidance
4.3. Potential Benefits of Mixed-Reality Video Feedback for Holographic Obstacle Avoidance
4.4. A Look into the Future: Applications of Mixed-Reality Technology
5. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Baum, L.F.; Cory, F.Y. The Master Key: An Electrical Fairy Tale, Founded upon the Mysteries of Electricity and the Optimism of Its Devotees; Bowen-Merrill Co.: Indianapolis, IN, USA, 1901. [Google Scholar]
- History of Virtual Reality. Available online: https://www.vrs.org.uk/virtual-reality/history.html (accessed on 14 October 2019).
- Augmented Reality—The Past, the Present and the Future. Available online: https://www.interaction-design.org/literature/article/augmented-reality-the-past-the-present-and-the-future (accessed on 14 October 2019).
- A Brief History of Augmented Reality (+Future Trends & Impact). Available online: https://learn.g2.com/history-of-augmented-reality (accessed on 14 October 2019).
- Eight Virtual Reality Milestones that Took it from Sci-fi to Your Living Room. Available online: https://www.digitaltrends.com/cool-tech/history-of-virtual-reality/ (accessed on 14 October 2019).
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Towards the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Omar Takleh, T.T.; Bakar, N.A.; Rahman, S.; Hamzah, R.; Abd Aziz, Z. A brief survey on SLAM methods in autonomous vehicles. Int. J. Eng. Technol. 2018, 7, 38–43. [Google Scholar] [CrossRef]
- Guillaume, B.; Zayed, A.; Li, Y.; Sébastien, G. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220. [Google Scholar] [CrossRef]
- García, S.; Guillén, M.; Barea, R.; Bergasa, L.; Molinos, E. Indoor SLAM for micro aerial vehicles control using monocular camera and sensor fusion. In Proceedings of the 2016 International Conference on Autonomous Robot Systems and Competitions (ICARSC), Braganca, Portugal, 4–6 May 2016; pp. 205–210. [Google Scholar] [CrossRef]
- Leng, C.; Cao, Q.; He, M.; Huang, Z. Development of a Mars Rover with mapping and localization system. Res. J. App. Sci. Eng. Technol. 2013, 6, 2127–2130. [Google Scholar] [CrossRef]
- Mountney, P.; Stoyanov, D.; Davison, A.; Yang, G.Z. Simultaneous stereoscope localization and soft-tissue mapping for minimal invasive surgery. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2006; Larsen, R., Nielsen, M., Sporring, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 347–354. [Google Scholar] [CrossRef]
- Gibson, J.J. The Ecological Approach to Visual Perception; Houghton Mifflin Company: Boston, MA, USA, 1979; p. 1. [Google Scholar]
- Boletsis, C. The New Era of Virtual Reality Locomotion: A Systematic Literature Review of Techniques and a Proposed Typology. Multimodal Technol. Interact. 2017, 1, 24. [Google Scholar] [CrossRef]
- Holograms, Spatial Anchors and the Future of Computer Vision with Dr. Marc Pollefeys. Available online: https://www.microsoft.com/en-us/research/blog/holograms-spatial-anchors-and-the-future-of-computer-vision-with-dr-marc-pollefeys/ (accessed on 14 October 2019).
- Helin, K.; Kuula, T.; Vizzi, C.; Karjalainen, J.; Vovk, A. User experience of augmented reality system for astronaut’s manual work support. Front. Robot. AI 2018, 5, 106. [Google Scholar] [CrossRef]
- Cometti, C.; Paizis, C.; Casteleira, A.; Pons, G.; Babault, N. Effects of mixed reality head-mounted glasses during 90 minutes of mental and manual tasks on cognitive and physiological functions. PeerJ 2018, 6, e5847. [Google Scholar] [CrossRef]
- Sun, R.; Aldunate, R.G.; Sosnoff, J.J. The validity of a mixed reality-based automated functional mobility assessment. Sensors 2019, 19, 2183. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, H.; Zhang, L.; El Saddik, A. Technical evaluation of HoloLens for multimedia: A first look. IEEE Multimed. 2018, 25, 8–18. [Google Scholar] [CrossRef]
- Auvinet, E.; Galna, B.; Aframian, A.; Cobb, J. Validation of the precision of the Microsoft HoloLens augmented reality headset head and hand motion measurement. Gait Posture 2017, 57, 175–176. [Google Scholar] [CrossRef]
- Ju, Y. Footstep detection with HoloLens. AJER 2018, 7, 223–233. [Google Scholar]
- Wang, I.; Smith, J.; Ruiz, J. Exploring virtual agents for augmented reality. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019. [Google Scholar] [CrossRef]
- Mcduff, D.; Hurter, C.; Gonzalez-Franco, M. Pulse and vital sign measurement in mixed reality using a HoloLens. In Proceedings of the 23rd ACM Symposium on Virtual Reality Software and Technology (VRST ’17), Göteborg, Sweden, 8–10 November 2017; pp. 34–42. [Google Scholar] [CrossRef]
- Bach, B.; Ronell, S.; Beyer, J.; Cordeil, M.; Pfister, H. The hologram in my hand: How effective is interactive exploration of 3D visualizations in immersive tangible augmented reality? IEEE Trans. Vis. Comput. Gr. 2018, 24, 457–467. [Google Scholar] [CrossRef] [PubMed]
- Riedlinger, U.; Oppermann, L.; Prinz, W. Tango vs. HoloLens: A comparison of collaborative indoor AR visualisations using hand-held and hands-free devices. Multimodal Technol. Interact. 2019, 3, 23. [Google Scholar] [CrossRef]
- Condino, S.; Carbone, M.; Piazza, R.; Ferrari, M.; Ferrari, V. Perceptual limits of optical see-through visors for augmented reality guidance of manual tasks. IEEE Trans. Biomed. Eng. 2019, 67, 411–419. [Google Scholar] [CrossRef]
- Turini, G.; Condino, S.; Parchi, P.; Viglialoro, R.; Piolanti, N.; Gesi, M.; Ferrari, M.; Ferrari, V. A Microsoft HoloLens mixed reality surgical simulator for patient-specific hip arthroplasty training. In Augmented Reality, Virtual Reality, and Computer Graphics, Proceedings of the 5th International Conference, AVR 2018, Otranto, Italy, 24–27 June 2018; De Paolis, L., Bourdot, P., Eds.; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Kress, B.C.; Cummings, W.J. 11-1: Invited Paper: Towards the Ultimate Mixed Reality Experience: HoloLens Display Architecture Choices; Wiley Online Library: Hoboken, NJ, USA, 2017; Volume 48, pp. 127–131. [Google Scholar] [CrossRef]
- Rolland, J.P.; Fuchs, H. Optical versus video see-through mead-mounted displays in medical visualization. Presence Teleoper. Virtual Environ. 2000, 9, 287–309. [Google Scholar] [CrossRef]
- Binaee, K.; Diaz, G.J. Assessment of an augmented reality apparatus for the study of visually guided walking and obstacle crossing. Behav. Res. Methods 2019, 51, 523–531. [Google Scholar] [CrossRef]
- Kim, A.; Kretch, K.S.; Zhou, Z.; Finley, J.M. The quality of visual information about the lower extremities influences visuomotor coordination during virtual obstacle negotiation. J. Neurophysiol. 2018, 120, 839–847. [Google Scholar] [CrossRef]
- Shotton, J.; Fitzgibbon, A.; Cook, M.; Sharp, T.; Finocchio, M.; Moore, R.; Kipman, A.; Blake, A. Real-time human pose recognition in parts from single depth images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011. [Google Scholar] [CrossRef]
- Dolatabadi, E.; Taati, B.; Mihailidis, A. Concurrent validity of the Microsoft Kinect for Windows v2 for measuring spatiotemporal gait parameters. Med. Eng. Phys. 2016, 38, 952–958. [Google Scholar] [CrossRef]
- Eltoukhy, M.; Kuenze, C.; Oh, J.; Jacopetti, M.; Wooten, S.; Signorile, J. Microsoft Kinect can distinguish differences in over-ground gait between older persons with and without Parkinson’s disease. Med. Eng. Phys. 2017, 44, 1–7. [Google Scholar] [CrossRef]
- Geerse, D.J.; Coolen, B.H.; Roerdink, M. Kinematic validation of a multi-Kinect v2 instrumented 10-meter walkway for quantitative gait assessments. PLoS ONE 2015, 10, e0139913. [Google Scholar] [CrossRef]
- Geerse, D.J.; Coolen, B.H.; Roerdink, M. Walking-adaptability assessments with the Interactive Walkway: Between-systems agreement and sensitivity to task and subject variations. Gait Posture 2017, 54, 194–201. [Google Scholar] [CrossRef] [PubMed]
- Geerse, D.J.; Coolen, H.; Kolijn, D.T.T.I.; Roerdink, M. Validation of foot placement locations from ankle data of a Kinect v2 sensor. Sensors 2017, 17, 2301. [Google Scholar] [CrossRef] [PubMed]
- Multidimensional Scaling—NCSS. Available online: https://www.ncss.com/wp-content/themes/ncss/pdf/Procedures/NCSS/Multidimensional_Scaling.pdf (accessed on 3 December 2019).
- Girden, E.R. ANOVA: Repeated Measures; Sage University Paper Series on Quantitative Applications in the Social Sciences; Sage: Newbury Park, CA, USA, 1992. [Google Scholar]
- Rietdyk, S.; Rhea, C.K. The effect of the visual characteristics of obstacles on risk of tripping and gait parameters during locomotion. Ophthalmic Physiol. Opt. 2011, 31, 302–310. [Google Scholar] [CrossRef] [PubMed]
- Rietdyk, S.; Rhea, C.K. Control of adaptive locomotion: Effect of visual obstruction and visual cues in the environment. Exp. Brain Res. 2006, 169, 272–278. [Google Scholar] [CrossRef] [PubMed]
- Rhea, C.K.; Rietdyk, S. Visual exteroceptive information provided during obstacle crossing did not modify the lower limb trajectory. Neurosci. Lett. 2007, 418, 60–65. [Google Scholar] [CrossRef] [PubMed]
- Mohagheghi, A.A.; Moraes, R.; Patla, A.E. The effects of distant and on-line visual information on the control of approach phase and step over an obstacle during locomotion. Exp. Brain Res. 2004, 155, 459–468. [Google Scholar] [CrossRef] [PubMed]
- Berard, J.R.; Vallis, L.A. Characteristics of single and double obstacle avoidance strategies: A comparison between adults and children. Exp. Brain Res. 2006, 175, 21–31. [Google Scholar] [CrossRef] [PubMed]
- Heijnen, M.J.H.; Muir, B.C.; Rietdyk, S. Factors leading to obstacle contact during adaptive locomotion. Exp. Brain Res. 2012, 223, 219–231. [Google Scholar] [CrossRef]
- Jansen, S.; Toet, A.; Werkhoven, P. Obstacle crossing with lower visual field restriction: Shifts in strategy. J. Mot. Behav. 2011, 43, 55–62. [Google Scholar] [CrossRef]
- Heijnen, M.J.H.; Romine, N.L.; Stumpf, D.M.; Rietdyk, S. Memory-guided obstacle crossing: More failures were observed for the trail limb versus lead limb. Exp. Brain Res. 2014, 232, 2131–2142. [Google Scholar] [CrossRef]
- Alexander, M.S.; Flodin, B.W.; Marigold, D.J. Prism adaptation and generalization during visually guided locomotor tasks. J. Neurophysiol. 2011, 106, 860–871. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Rhea, C.K.; Rietdyk, S. Influence of an unexpected perturbation on adaptive gait behavior. Gait Posture 2011, 34, 439–441. [Google Scholar] [CrossRef] [PubMed]
- Patla, A.E.; Rietdyk, S.; Martin, C.; Prentice, S. Locomotor patterns of the leading and the trailing limbs as solid and fragile obstacles are stepped over: Some insights into the role of vision during locomotion. J. Mot. Behav. 1996, 28, 35–47. [Google Scholar] [CrossRef] [PubMed]
- Weerdesteyn, V.; Rijken, H.; Geurts, A.C.; Smits-Engelsman, B.C.; Mulder, T.; Duysens, J. A five-week exercise program can reduce falls and improve obstacle avoidance in the elderly. Gerontology 2006, 52, 131–141. [Google Scholar] [CrossRef] [PubMed]
- van Ooijen, M.W.; Heeren, A.; Smulders, K.; Geurts, A.C.; Janssen, T.W.; Beek, P.J.; Roerdink, M. Improved gait adjustments after gait adaptability training are associated with reduced attentional demands in persons with stroke. Exp. Brain Res. 2015, 233, 1007–1018. [Google Scholar] [CrossRef]
- van Ooijen, M.W.; Roerdink, M.; Trekop, M.; Janssen, T.W.J.; Beek, P.J. The efficacy of treadmill training with and without projected visual context for improving walking ability and reducing fall incidence and fear of falling in older adults with fall-related hip fracture: A randomized controlled trial. BMC Geriatr. 2016, 16, 215. [Google Scholar] [CrossRef]
- Geerse, D.J.; Roerdink, M.; Marinus, J.; van Hilten, J.J. Assessing walking adaptability in Parkinson’s disease: “the Interactive Walkway”. Front. Neurol. 2018, 9, 1096. [Google Scholar] [CrossRef]
- Geerse, D.J.; Roerdink, M.; Marinus, J.; van Hilten, J.J. Walking adaptability for targeted fall-risk assessments. Gait Posture 2019, 70, 203–210. [Google Scholar] [CrossRef]
- Timmermans, C.; Roerdink, M.; Janssen, T.W.J.; Beek, P.J.; Meskers, C.G.M. Automatized, standardized, and patient-tailored progressive walking-adaptability training: A proof-of-concept study. Phys. Ther. 2019, 99, 882–892. [Google Scholar] [CrossRef]
- Here’s the US Army Version of HoloLens that Microsoft Employees were Protesting. Available online: https://www.theverge.com/2019/4/6/18298335/microsoft-hololens-us-military-version (accessed on 15 October 2019).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Participants Identified in Experiment 1 with Extreme Lead-Foot Margins | ||||
| Real obstacles | Holographic obstacles | |||
| All 30 trials | Baseline trials | Feedback trials *** | Follow-up trials | |
| 4 | 0.327–0.394 * | 0.418–0.659 | 0.347–0.398 ** (9) | 0.382–0.417 ** |
| 7 | 0.373–0.535 * | 0.548–0.707 | 0.511–0.533 ** (5) | 0.501–0.591 |
| 10 | 0.378–0.514 * | 0.607–0.682 | 0.577–0.646 (14) | 0.598–0.687 |
| Participants Identified in Experiment 1 without Raising Their Trail Foot | ||||
| Real obstacles | Holographic obstacles | |||
| All 30 trials | Baseline trials | Feedback trials | Follow-up trials | |
| 1 | 0.393–0.514 * | –0.020–0.076 | 0.275–0.400 ** (1) | 0.434–0.542 ** |
| 8 | 0.420–0.503 * | –0.058–0.352 | 0.418–0.544 ** (1) | 0.429–0.647 ** |
| 11 | 0.375–0.532 * | 0.010–0.125 | 0.197–0.323 ** (1) | 0.024–0.213 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coolen, B.; Beek, P.J.; Geerse, D.J.; Roerdink, M. Avoiding 3D Obstacles in Mixed Reality: Does It Differ from Negotiating Real Obstacles? Sensors 2020, 20, 1095. https://doi.org/10.3390/s20041095
Coolen B, Beek PJ, Geerse DJ, Roerdink M. Avoiding 3D Obstacles in Mixed Reality: Does It Differ from Negotiating Real Obstacles? Sensors. 2020; 20(4):1095. https://doi.org/10.3390/s20041095
Chicago/Turabian StyleCoolen, Bert, Peter J. Beek, Daphne J. Geerse, and Melvyn Roerdink. 2020. "Avoiding 3D Obstacles in Mixed Reality: Does It Differ from Negotiating Real Obstacles?" Sensors 20, no. 4: 1095. https://doi.org/10.3390/s20041095
APA StyleCoolen, B., Beek, P. J., Geerse, D. J., & Roerdink, M. (2020). Avoiding 3D Obstacles in Mixed Reality: Does It Differ from Negotiating Real Obstacles? Sensors, 20(4), 1095. https://doi.org/10.3390/s20041095