Interactive, Multiscale Urban-Traffic Pattern Exploration Leveraging Massive GPS Trajectories

Abstract
1. Introduction
- A three-layer framework is proposed for real-time interactive traffic pattern exploration analysis on massive GPS trajectories.
- The synopses are proposed to constitute a middle-tier data structure to accelerate pattern recognition and support real-time exploration.
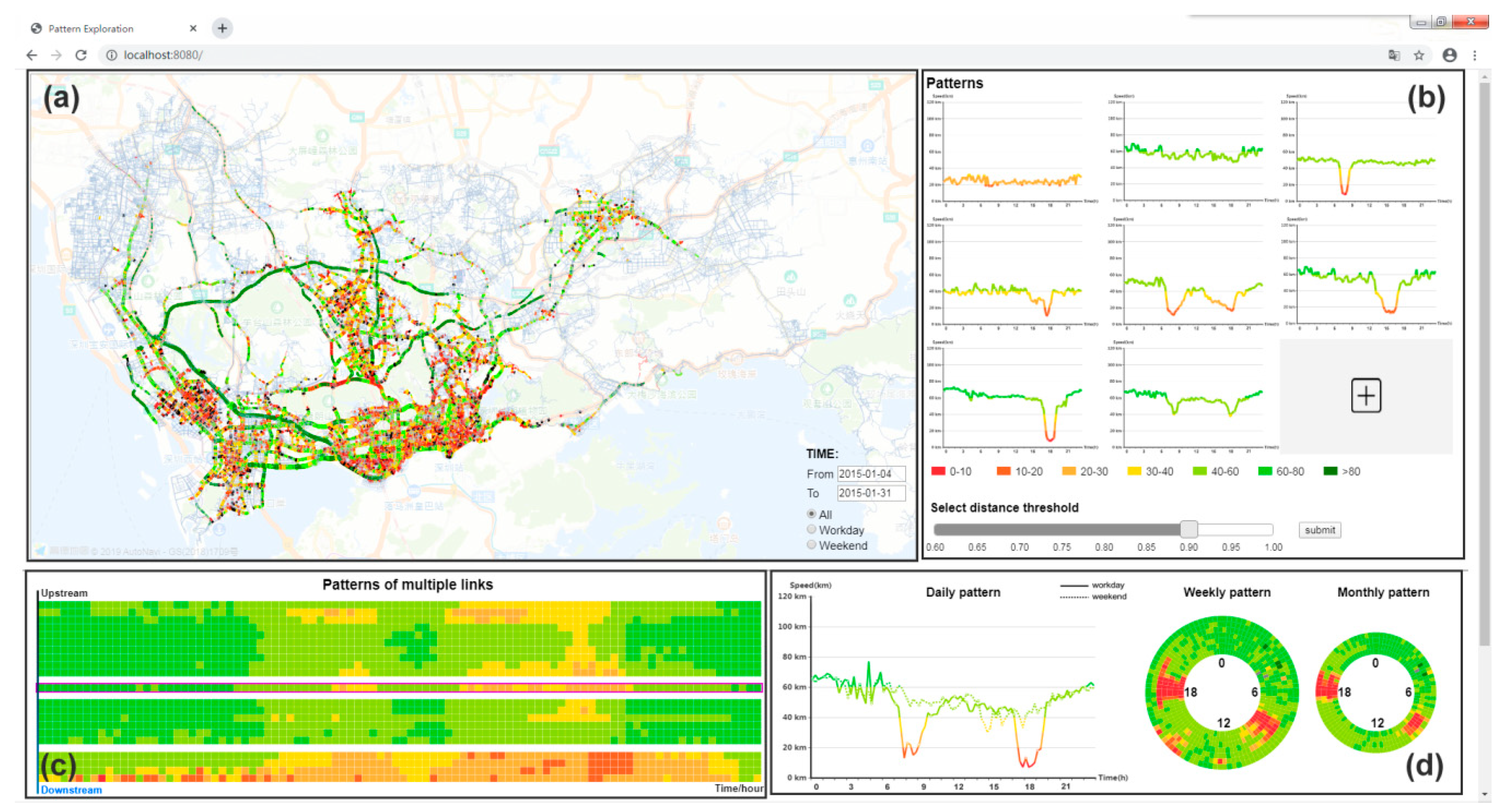
- A friendly interactive visual analytics system is developed for exploring urban road traffic dynamics intuitively.
2. Related Work
2.1. Data-Driven Traffic Monitoring
2.2. Traffic Visual Analytics
3. Study Area and Datasets
4. Methodology
4.1. Data Processing
4.2. Pattern Recognition
| Algorithm 1 TVD |
| Input: , : two time sequential synopses μ: adjusting parameter Output: : distance value 1: Length of sequential synopses: 2: Manhattan distance of and : 3: Maximum Manhattan distance: 4: Vector of the difference of and : 5: , where 6: for in do 7: 8: 9: 10: if then 11: 12: end if 13: end for 14: 15: 16: 17: return |
| Algorithm 2 TRP |
| Input: : All synopses : Specified temporal type : Parameter ‘eps‘ in DBSCAN Output: : Collection of traffic patterns recognized 1: Collection of daily traffic state sequences: 2: All days during the period of : 3: for each in s do 4: if within and in then 5: Push states of synopses on into chronologically 6: end if 7: end for 8: Push every into 9: 10: for each in do 11: 12: Traffic pattern recognized of : 13: The number of sequences in : 14: for in do 15: for each in do 16: 17: end for 18: end for 19: 20: Push into 21: end for 22: return |
4.3. Interactive Traffic Pattern Explorative Analysis
5. Case Study
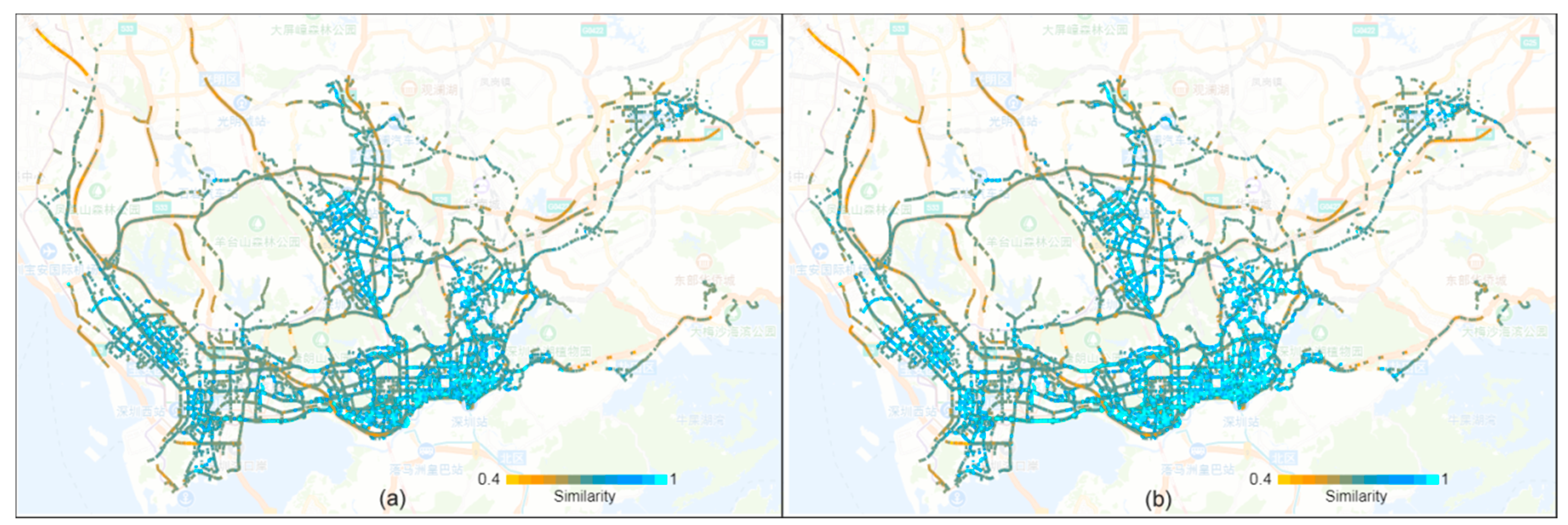
5.1. Regularity of Traffic States
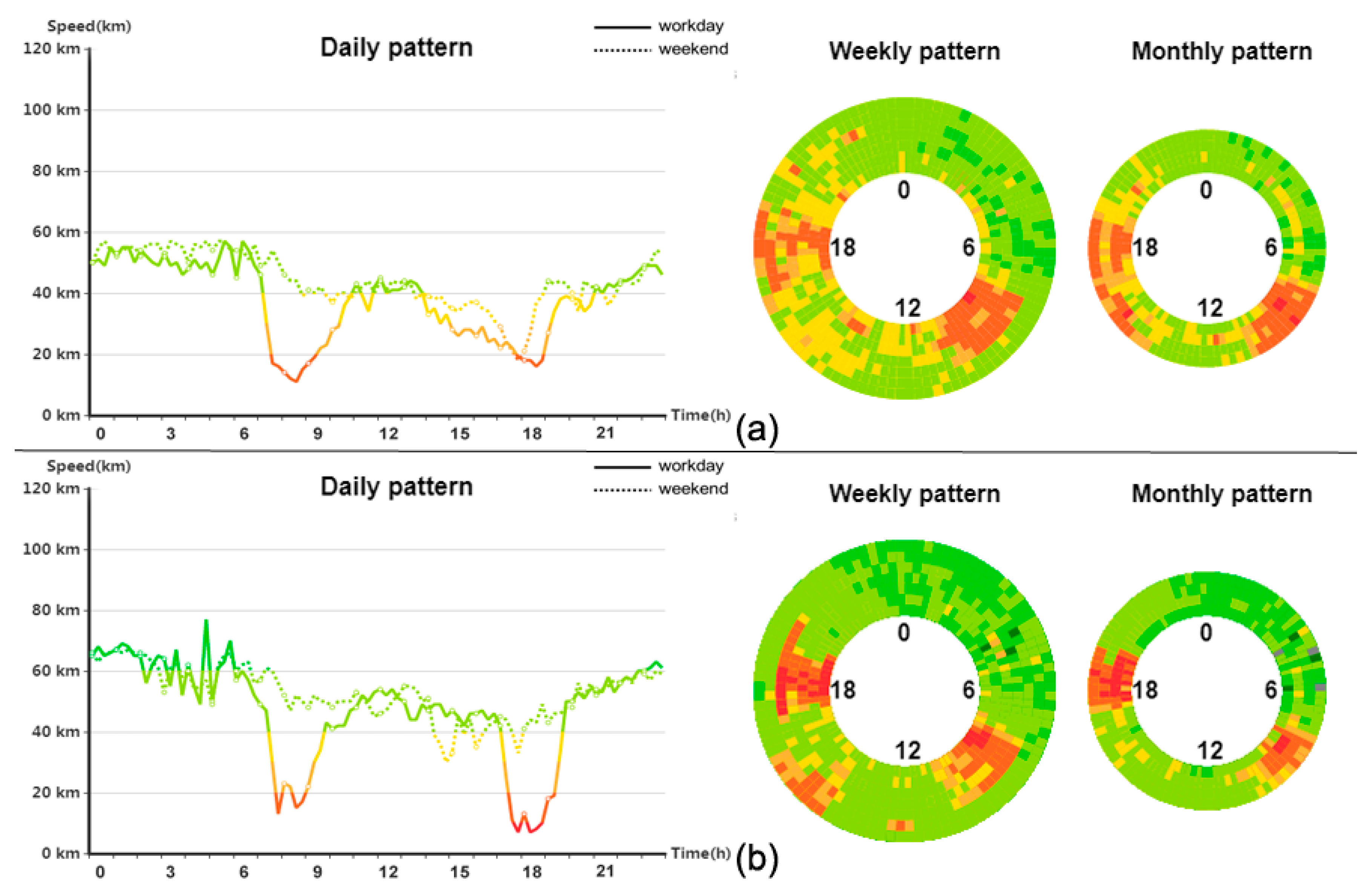
5.2. Temporal Dynamic of Road Traffic
5.3. Traffic Pattern of Local Road Networks
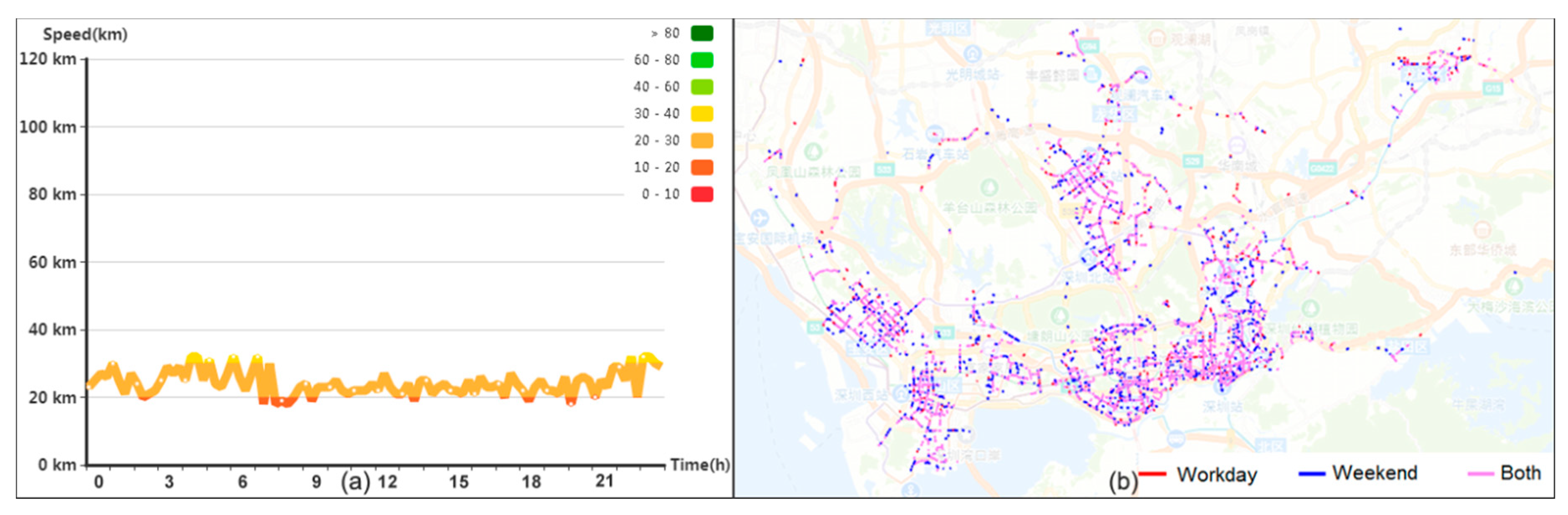
5.4. Traffic Pattern Exploration
6. Discussion
6.1. Computing Performance
6.2. Scalability
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, C.; Zhang, D.; Li, N.; Zhou, Z.H. B-Planner: Planning Bidirectional Night Bus Routes Using Large-Scale Taxi GPS Traces. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1451–1465. [Google Scholar] [CrossRef]
- Li, Z.; Filev, D.P.; Kolmanovsky, I.; Atkins, E.; Lu, J. A New Clustering Algorithm for Processing GPS-Based Road Anomaly Reports with a Mahalanobis Distance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1980–1988. [Google Scholar] [CrossRef]
- Pang, L.X.; Chawla, S.; Liu, W.; Zheng, Y. On detection of emerging anomalous traffic patterns using GPS data. Data Knowl. Eng. 2013, 87, 357–373. [Google Scholar] [CrossRef]
- Mao, Y.; Zhong, H.; Xiao, X.; Li, X. A Segment-Based Trajectory Similarity Measure in the Urban Transportation Systems. Sensors 2017, 17, 524. [Google Scholar] [CrossRef]
- Yang, X.; Stewart, K.; Tang, L.; Xie, Z.; Li, Q. A Review of GPS Trajectories Classification Based on Transportation Mode. Sensors 2018, 18, 3741. [Google Scholar] [CrossRef]
- Yang, W.; Ai, T.; Lu, W. A Method for Extracting Road Boundary Information from Crowdsourcing Vehicle GPS Trajectories. Sensors 2018, 18, 1261. [Google Scholar] [CrossRef]
- Xie, J.Y.; Tu, W.; Li, Q.; Chang, X.; Ma, C.L.; Li, Z.; Huang, L. A parallel map-matching approach for large volume floating car stream data. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 697–703. [Google Scholar]
- Quek, C.; Pasquier, M.; Lim, B.B.S. POP-TRAFFIC: A novel fuzzy neural approach to road traffic analysis and prediction. IEEE Trans. Intell. Transp. Syst. 2006, 7, 133–146. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, X.; Cao, J.; He, L.; Stenneth, L.; Yu, P.S.; Li, Z.; Huang, Z. Computing Urban Traffic Congestions by Incorporating Sparse GPS Probe Data and Social Media Data. ACM Trans. Inf. Syst. 2017, 35, 1–30. [Google Scholar] [CrossRef]
- Altintasi, O.; Tuydes-Yaman, H.; Tuncay, K. Detection of urban traffic patterns from Floating Car Data (FCD). Transp. Res. Procedia 2017, 22, 382–391. [Google Scholar] [CrossRef]
- Scholz, R.W.; Lu, Y. Detection of dynamic activity patterns at a collective level from large-volume trajectory data. Int. J. Geogr. Inf. Sci. 2014, 28, 946–963. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, F.; Tu, L.; Xu, C.; Shen, D.; Tian, C.; Li, X.Y.; Li, Z. Estimation of Passenger Route Choice Pattern Using Smart Card Data for Complex Metro Systems. IEEE Trans. Intell. Transp. Syst. 2017, 18, 790–801. [Google Scholar] [CrossRef]
- Hou, Z.; Li, X. Repeatability and Similarity of Freeway Traffic Flow and Long-Term Prediction under Big Data. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1786–1796. [Google Scholar] [CrossRef]
- Salamanis, A.; Margaritis, G.; Kehagias, D.D.; Matzoulas, G.; Tzovaras, D. Identifying patterns under both normal and abnormal traffic conditions for short-term traffic prediction. Transp. Res. Procedia 2017, 22, 665–674. [Google Scholar] [CrossRef]
- Mahboubi, Z.; Kochenderfer, M.J. Learning Traffic Patterns at Small Airports from Flight Tracks. IEEE Trans. Intell. Transp. Syst. 2017, 18, 917–926. [Google Scholar] [CrossRef]
- Qiang, X.; Shuang-Shuang, Y. Clustering Algorithm for Urban Taxi Carpooling Vehicle Based on Data Field Energy. J. Adv. Transp. 2018, 2018, 8. [Google Scholar] [CrossRef]
- Zou, H.; Yue, Y.; Li, Q.; Shi, Y. A spatial analysis approach for describing spatial pattern of urban traffic state. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 557–562. [Google Scholar] [CrossRef]
- Guo, H.; Wang, Z.; Yu, B.; Zhao, H.; Yuan, X. TripVista: Triple Perspective Visual Trajectory Analytics and its application on microscopic traffic data at a road intersection. In Proceedings of the 2011 IEEE Pacific Visualization Symposium, Hong Kong, China, 1–4 March 2011; pp. 163–170. [Google Scholar] [CrossRef]
- Naveh, K.S.; Kim, J. Urban Trajectory Analytics: Day-of-Week Movement Pattern Mining Using Tensor Factorization. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2540–2549. [Google Scholar] [CrossRef]
- Oh, S.D.; Kim, Y.J.; Hong, J.S. Urban Traffic Flow Prediction System Using a Multifactor Pattern Recognition Model. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2744–2755. [Google Scholar] [CrossRef]
- Xie, Z.; Lv, W.; Huang, S.; Lu, Z.; Du, B.; Huang, R. Sequential Graph Neural Network for Urban Road Traffic Speed Prediction. IEEE Access 2019, 1. [Google Scholar] [CrossRef]
- Shi, C.; Chen, B.Y.; Lam, W.H.K.; Li, Q. Heterogeneous Data Fusion Method to Estimate Travel Time Distributions in Congested Road Networks. Sensors 2017, 17, 2822. [Google Scholar] [CrossRef]
- Tu, W.; Li, Q.; Fang, Z.; Shaw, S.L.; Zhou, B.; Chang, X. Optimizing the locations of electric taxi charging stations: A spatial—Temporal demand coverage approach. Transp. Res. Part C Emerg. Technol. 2016, 65, 172–189. [Google Scholar] [CrossRef]
- Imawan, A.; Indikawati, F.I.; Kwon, J.; Rao, P. Querying and Extracting Timeline Information from Road Traffic Sensor Data. Sensors 2016, 16, 1340. [Google Scholar] [CrossRef]
- Terroso-Saenz, F.; Muñoz, A.; Cecilia, J.M. QUADRIVEN: A Framework for Qualitative Taxi Demand Prediction Based on Time-Variant Online Social Network Data Analysis. Sensors 2019, 19, 4882. [Google Scholar] [CrossRef]
- Kerner, B.S.; Demir, C.; Herrtwich, R.G.; Klenov, S.L.; Rehborn, H.; Aleksic, M.; Haug, A. Traffic state detection with floating car data in road networks. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 13–16 September 2005; pp. 44–49. [Google Scholar] [CrossRef]
- Wilby, M.R.; Díaz, J.J.V.; Rodríguez Gonz’lez, A.B.; Sotelo, M.A. Lightweight Occupancy Estimation on Freeways Using Extended Floating Car Data. J. Intell. Transp. Syst. 2014, 18, 149–163. [Google Scholar] [CrossRef]
- Polson, N.; Sokolov, V. Bayesian Particle Tracking of Traffic Flows. IEEE Trans. Intell. Transp. Syst. 2018, 19, 345–356. [Google Scholar] [CrossRef]
- Yang, S.; Kalpakis, K.; Biem, A. Detecting Road Traffic Events by Coupling Multiple Timeseries With a Nonparametric Bayesian Method. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1936–1946. [Google Scholar] [CrossRef]
- Sun, J.; Sun, J. A dynamic Bayesian network model for real-time crash prediction using traffic speed conditions data. Transp. Res. Part C Emerg. Technol. 2015, 54, 176–186. [Google Scholar] [CrossRef]
- Adu-Gyamfi, Y.; Sharma, A.; Knickerbocker, S.; Hawkins, N.; Jackson, M. Reliability of Probe Speed Data for Detecting Congestion Trends. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2243–2249. [Google Scholar] [CrossRef]
- Tu, W.; Santi, P.; Zhao, T.; He, X.; Li, Q.; Dong, L.; Wallington, T.J.; Ratti, C. Acceptability, energy consumption, and costs of electric vehicle for ride-hailing drivers in Beijing. Appl. Energy 2019, 250, 147–160. [Google Scholar] [CrossRef]
- Wang, F.; Hu, L.; Zhou, D.; Sun, R.; Hu, J.; Zhao, K. Estimating online vacancies in real-time road traffic monitoring with traffic sensor data stream. Ad Hoc Netw. 2015, 35, 3–13. [Google Scholar] [CrossRef]
- Li, Q.; Ge, Q.; Miao, L.; Qi, M. Measuring Variability of Arterial Road Traffic Condition Using Archived Probe Data. J. Transp. Syst. Eng. Inf. Technol. 2012, 12, 41–46. [Google Scholar] [CrossRef]
- Zhang, Y.; Haghani, A.; Zeng, X. Component GARCH Models to Account for Seasonal Patterns and Uncertainties in Travel-Time Prediction. IEEE Trans. Intell. Transp. Syst. 2015, 16, 719–729. [Google Scholar] [CrossRef]
- Daraghmi, Y.A.; Yi, C.W.; Chiang, T.C. Negative Binomial Additive Models for Short-Term Traffic Flow Forecasting in Urban Areas. IEEE Trans. Intell. Transp. Syst. 2014, 15, 784–793. [Google Scholar] [CrossRef]
- Chen, M.; Yu, X.; Liu, Y. Mining moving patterns for predicting next location. Inf. Syst. 2015, 54, 156–168. [Google Scholar] [CrossRef]
- Yue, Y.; Yeh, G.O. Spatiotemporal traffic-flow dependency and short-term traffic forecasting. Environ. Plan. B Plan. Des. 2008, 35, 762–771. [Google Scholar] [CrossRef]
- Cai, P.; Wang, Y.; Lu, G.; Chen, P.; Ding, C.; Sun, J. A spatiotemporal correlative k-nearest neighbor model for short-term traffic multistep forecasting. Transp. Res. Part C Emerg. Technol. 2016, 62, 21–34. [Google Scholar] [CrossRef]
- Chen, W.; Guo, F.; Wang, F.Y. A Survey of Traffic Data Visualization. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2970–2984. [Google Scholar] [CrossRef]
- Lundblad, P.; Eurenius, O.; Heldring, T. Interactive Visualization of Weather and Ship Data. In Proceedings of the 13th International Conference Information Visualisation, Barcelona, Spain, 15–17 July 2009; pp. 379–386. [Google Scholar] [CrossRef]
- Wood, J.; Dykes, J.; Slingsby, A. Visualisation of Origins, Destinations and Flows with OD Maps. Cartogr. J. 2010, 47, 117–129. [Google Scholar] [CrossRef]
- Andrienko, G.; Andrienko, N.; Dykes, J.; Fabrikant, S.I.; Wachowicz, M. Geovisualization of Dynamics, Movement and Change: Key Issues and Developing Approaches in Visualization Research. Inf. Vis. 2008, 7, 173–180. [Google Scholar] [CrossRef]
- Tominski, C.; Schumann, H.; Andrienko, G.; Andrienko, N. Stacking-Based Visualization of Trajectory Attribute Data. IEEE Trans. Vis. Comput. Graph. 2012, 18, 2565–2574. [Google Scholar] [CrossRef]
- Amini, F.; Rufiange, S.; Hossain, Z.; Ventura, Q.; Irani, P.; McGuffin, M.J. The Impact of Interactivity on Comprehending 2D and 3D Visualizations of Movement Data. IEEE Trans. Vis. Comput. Graph. 2015, 21, 122–135. [Google Scholar] [CrossRef]
- Sun, G.; Liang, R.; Qu, H.; Wu, Y. Embedding Spatio-Temporal Information into Maps by Route-Zooming. IEEE Trans. Vis. Comput. Graph. 2017, 23, 1506–1519. [Google Scholar] [CrossRef] [PubMed]
- Scheepens, R.; Willems, N.; Van de Wetering, H.; Andrienko, G.; Andrienko, N.; Van Wijk, J.J. Composite Density Maps for Multivariate Trajectories. IEEE Trans. Vis. Comput. Graph. 2011, 17, 2518–2527. [Google Scholar] [CrossRef] [PubMed]
- Andrienko, G.; Andrienko, N.; Hurter, C.; Rinzivillo, S.; Wrobel, S. Scalable Analysis of Movement Data for Extracting and Exploring Significant Places. IEEE Trans. Vis. Comput. Graph. 2013, 19, 1078–1094. [Google Scholar] [CrossRef] [PubMed]
- Guo, D.; Zhu, X. Origin-Destination Flow Data Smoothing and Mapping. IEEE Trans. Vis. Comput. Graph. 2014, 20, 2043–2052. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Lu, M.; Yuan, X.; Zhang, J.; Wetering, H.v.d. Visual Traffic Jam Analysis Based on Trajectory Data. IEEE Trans. Vis. Comput. Graph. 2013, 19, 2159–2168. [Google Scholar] [CrossRef] [PubMed]
- Andrienko, G.; Andrienko, N.; Bak, P.; Keim, D.; Wrobel, S. Visual Analytics of Movement; Springer Publishing Company: New York, NY, USA, 2013; pp. 1252–1263. [Google Scholar]
- Miranda, F.; Doraiswamy, H.; Lage, M.; Zhao, K.; Gonçalves, B.; Wilson, L.; Hsieh, M.; Silva, C.T. Urban Pulse: Capturing the Rhythm of Cities. IEEE Trans. Vis. Comput. Graph. 2017, 23, 791–800. [Google Scholar] [CrossRef] [PubMed]
- Lu, M.; Lai, C.; Ye, T.; Liang, J.; Yuan, X. Visual Analysis of Multiple Route Choices based on General GPS Trajectories. IEEE Trans. Big Data 2017, 3, 234–247. [Google Scholar] [CrossRef]
- Liu, H.; Gao, Y.; Lu, L.; Liu, S.; Qu, H.; Ni, L.M. Visual analysis of route diversity. In Proceedings of the 2011 IEEE Conference on Visual Analytics Science and Technology (VAST), Providence, RI, USA, 23–28 October 2011; pp. 171–180. [Google Scholar] [CrossRef]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.; Li, M.; Xing, W.; Lu, D. Mining Road Network Correlation for Traffic Estimation via Compressive Sensing. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1880–1893. [Google Scholar] [CrossRef]
- Yang, B.; Guo, C.; Jensen, C.S. Travel cost inference from sparse, spatio temporally correlated time series using Markov models. Proc. VLDB Endow. 2013, 6, 769–780. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining (KDD-96), Portland, Oregon, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Shneiderman, B. The eyes have it: A task by data type taxonomy for information visualizations. In Proceedings of the 1996 IEEE Symposium on Visual Languages, Boulder, CO, USA, 3–6 September 1996; pp. 336–343. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, F.; Hsieh, H.P. U-Air: When Urban Air Quality Inference Meets Big Data. In Proceedings of the 19th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining ACM, Chicago, IL, USA, 11–14 August 2013. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Description | Example |
|---|---|---|
| Vehicle ID | Unique identifier of the vehicle | 117376 |
| Time stamp | Recording time, with an accuracy of one second | 2015-01-11 00:00:10 |
| Longitude | Longitude when recorded | 114.124967 |
| Latitude | Latitude when recorded | 22.610739 |
| Speed | Instantaneous velocity when recorded | 72 |
| Occupation status | Whether passengers are in the taxi | 1 |
| Table | 0.5–0.6 | 0.6–0.7 | 0.7–0.8 | 0.8–0.9 | 0.9–1.0 | Total | |
|---|---|---|---|---|---|---|---|
| Workday | Number of road links | 5 | 207 | 2753 | 9000 | 3301 | 15,266 |
| Total length of road links (km) | 1.0 | 37.4 | 454.1 | 1335.8 | 465.9 | 2294.2 | |
| Weekend | Number of road links | 9 | 273 | 2148 | 8098 | 4738 | 15,266 |
| Total length of road links (km) | 1.7 | 48.8 | 351.6 | 1208.9 | 683.2 | 2294.2 | |
| Spatiotemporal Scale | 5 min | 15 min | 30 min |
|---|---|---|---|
| 100 m | 3324 M | 1108 M | 552 M |
| 200 m | 1424 M | 474 M | 238 M |
| 500 m | 570 M | 190 M | 96 M |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Lu, M.; Li, Q. Interactive, Multiscale Urban-Traffic Pattern Exploration Leveraging Massive GPS Trajectories. Sensors 2020, 20, 1084. https://doi.org/10.3390/s20041084
Wang Q, Lu M, Li Q. Interactive, Multiscale Urban-Traffic Pattern Exploration Leveraging Massive GPS Trajectories. Sensors. 2020; 20(4):1084. https://doi.org/10.3390/s20041084
Chicago/Turabian StyleWang, Qi, Min Lu, and Qingquan Li. 2020. "Interactive, Multiscale Urban-Traffic Pattern Exploration Leveraging Massive GPS Trajectories" Sensors 20, no. 4: 1084. https://doi.org/10.3390/s20041084
APA StyleWang, Q., Lu, M., & Li, Q. (2020). Interactive, Multiscale Urban-Traffic Pattern Exploration Leveraging Massive GPS Trajectories. Sensors, 20(4), 1084. https://doi.org/10.3390/s20041084