Design for a Highly Stable Laser Source Based on the Error Model of High-Speed High-Resolution Heterodyne Interferometers




Abstract
1. Introduction
2. HSHR-HI Measurement Error Model
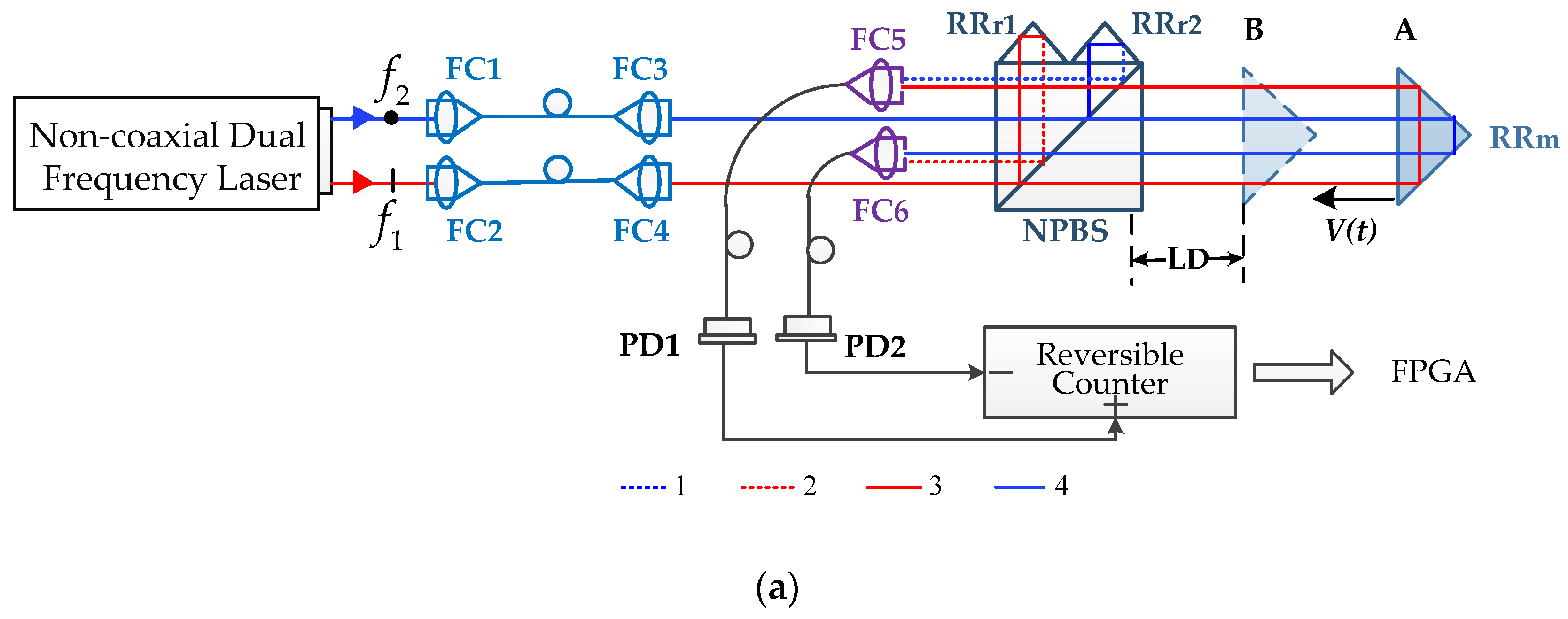
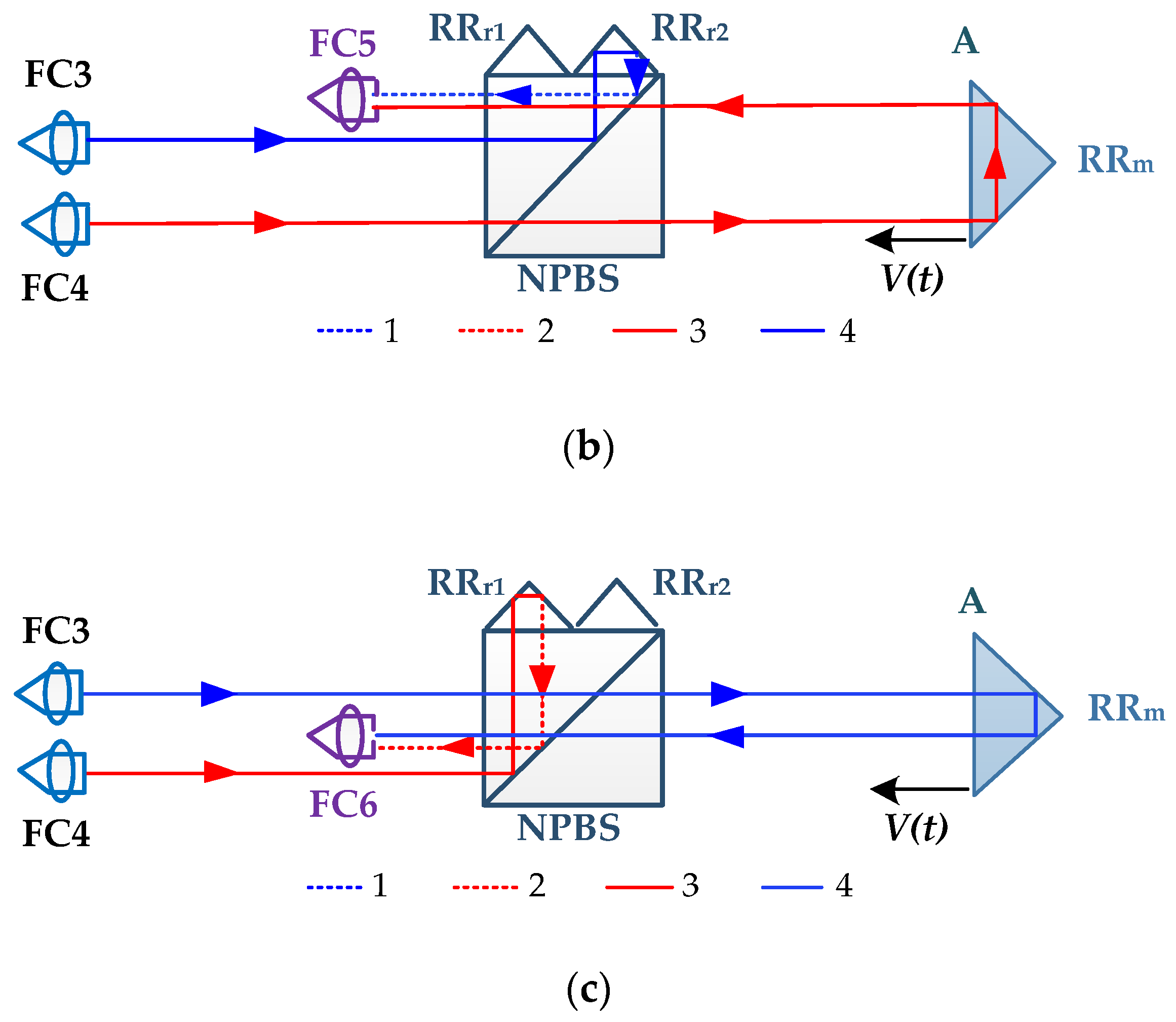
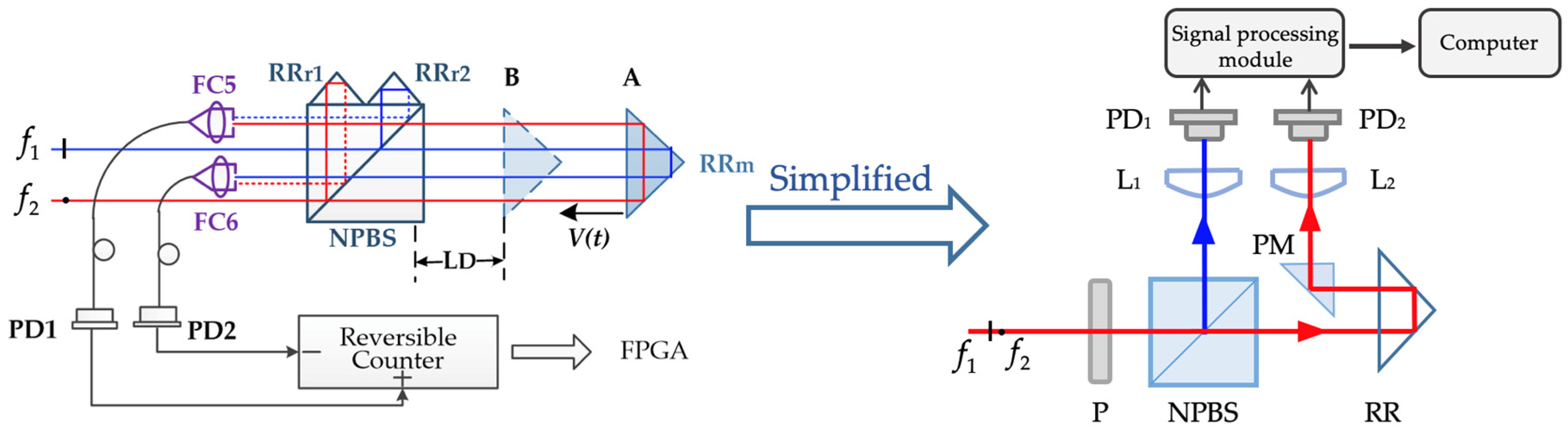
2.1. HSHR-HI Measurement Principle
2.2. Measurement Error Model of HSHR-HI
3. Experimental Validation
3.1. Validation for the Error Model of HSHR-HI
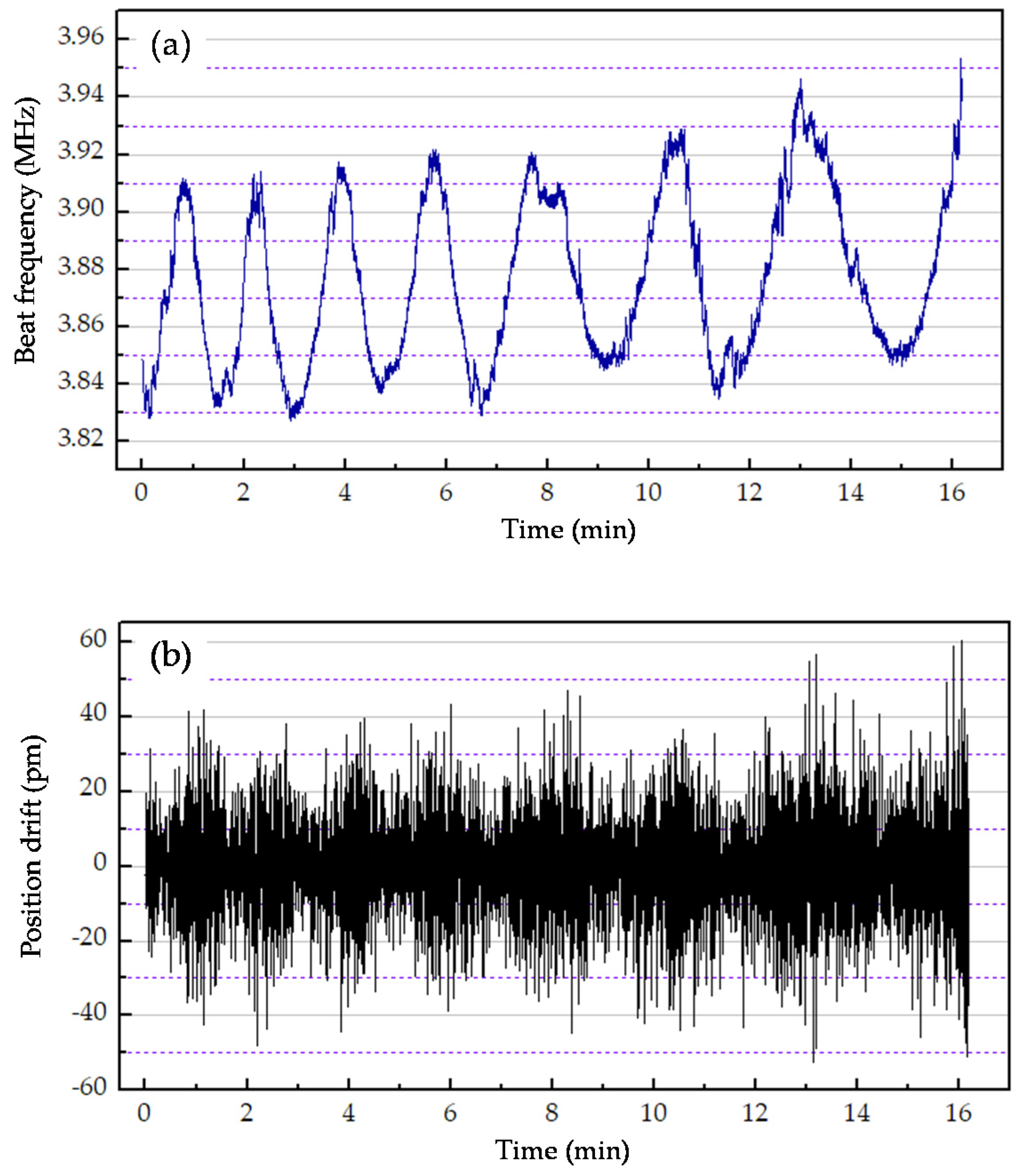
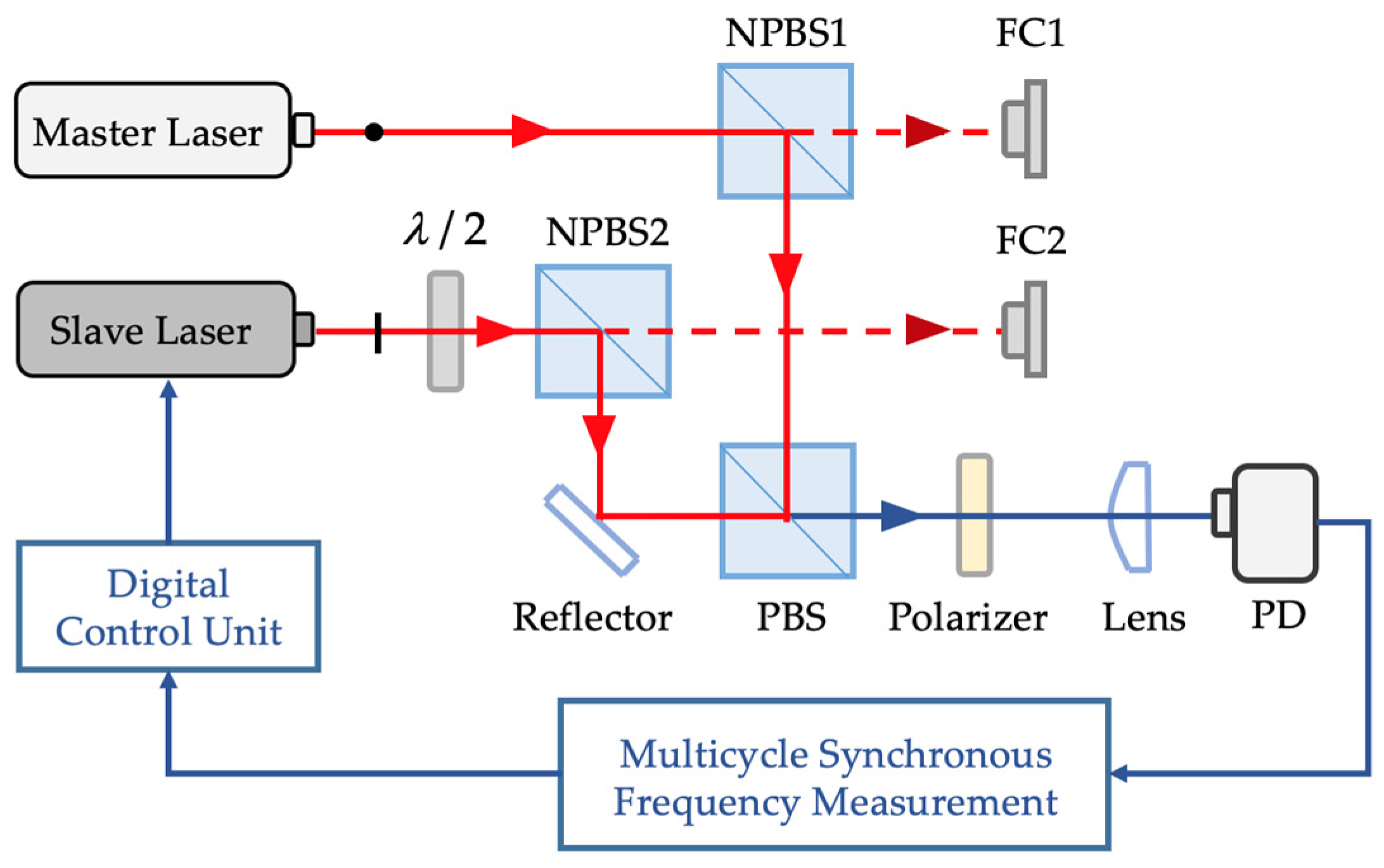
3.2. Setup for a Laser Source with Low Beat Frequency Drift
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Joo, K.-N.; Ellis, J.; Buice, E.S.; Spronck, J.W.; Schmidt, R.H.M. High resolution heterodyne interferometer without detecsection periodic nonlinearity. Opt. Express 2010, 18, 1159–1165. [Google Scholar] [CrossRef] [PubMed]
- Bobroff, N. Recent advances in displacement measuring interferometry. Meas. Sci. Technol. 1993, 4, 907–926. [Google Scholar] [CrossRef]
- Schmitz, T.; Beckwith, J. Acousto-optic displacement-measuring interferometer: A new heterodyne interferometer with Ångstrom-level periodic error. J. Mod. Opt. 2002, 49, 2105–2114. [Google Scholar] [CrossRef]
- Hou, W.; Wilkening, G. Investigation and compensation of the nonlinearity of heterodyne interferometers. Precis. Eng. 1992, 14, 91–98. [Google Scholar] [CrossRef]
- Weichert, C.; Köchert, P.; Koning, R.; Flügge, J.; Andreas, B.; Kuetgens, U.; Yacoot, A. A heterodyne interferometer with periodic nonlinearities smaller than ±10 pm. Meas. Sci. Technol. 2012, 23, 094005. [Google Scholar] [CrossRef]
- Cosijns, S.; Haitjema, H.; Schellekens, P. Modeling and verifying non-linearities in heterodyne displacement interferometry. Precis. Eng. 2002, 26, 448–455. [Google Scholar] [CrossRef]
- Rosenbluth, A.; Bobroff, N. Optical sources of non-linearity in heterodyne interferometers. Precis. Eng. 1990, 12, 7–11. [Google Scholar] [CrossRef]
- Hou, W. Optical parts and the nonlinearity in heterodyne interferometers. Precis. Eng. 2006, 30, 337–346. [Google Scholar] [CrossRef]
- Eom, T.; Choi, T.; Lee, K. A simple method for the compensation of the nonlinearity in the heterodyne interferometer. Meas. Sci. Technol. 2002, 13, 222–225. [Google Scholar] [CrossRef]
- Haitjema, H.; Cosijns, S.J.A.G.; Roset, N.J.J.; Jansen, M.J. Improving a commercially available heterodyne laser interferometer to sub-nm uncertainty. In Proceedings of the Optical Science and Technology, SPIE’s 48th Annual Meeting, San Diego, CA, USA, 20 November 2003. [Google Scholar]
- Joo, K.-N.; Ellis, J.; Spronck, J.W.; Van Kan, P.J.M.; Schmidt, R.H.M. Simple heterodyne laser interferometer with subnanometer periodic errors. Opt. Lett. 2009, 34, 386–388. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, M.; Yamagami, T.; Nakayama, K. Linear interpolation of periodic error in a heterodyne laser interferometer at subnanometer levels (dimension measurement). IEEE Trans. Instrum. Meas. 1989, 38, 552–554. [Google Scholar] [CrossRef]
- Diao, X.; Hu, P.; Xue, Z.; Kang, Y. High-speed high-resolution heterodyne interferometer using a laser with low beat frequency. Appl. Opt. 2016, 55, 110–116. [Google Scholar] [CrossRef] [PubMed]
- Fu, H.; Wu, G.; Hu, P.; Tan, J.; Ding, X. Thermal Drift of Optics in Separated-Beam Heterodyne Interferometers. IEEE Trans. Instrum. Meas. 2018, 67, 1446–1450. [Google Scholar] [CrossRef]
- Fu, H.; Wu, G.; Hu, P.; Ji, R.; Tan, J.; Ding, X. Highly thermal-stable heterodyne interferometer with minimized periodic nonlinearity. Appl. Opt. 2018, 57, 1463–1467. [Google Scholar] [CrossRef] [PubMed]
- Zygo. Available online: https://www.zygo.com/?/met/markets/stageposition/zmi/laserheads/ (accessed on 25 October 2019).
- Sternkopf, C.; Diethold, C.; Gerhardt, U.; Wurmus, J.; Manske, E. Heterodyne interferometer laser source with a pair of two phase locked loop coupled He–Ne lasers by 632.8 nm. Meas. Sci. Technol. 2012, 23, 074006. [Google Scholar] [CrossRef]
- Köchert, P.; Weichert, C.; Flügge, J.; Wurmus, J.; Manske, E. Digital beat frequency control of an offset-locked laser system. In Proceedings of the 58th Ilmenau Scientific Colloquium, Ilmenau, Germany, 8–12 September 2014. [Google Scholar]
- Boensch, G.; Potulski, E. Fit of Edlen formulae to measure values of the refractive index of air. SPIE’s Int. Symp. Opt. Sci. 1998, 3477, 62–67. [Google Scholar]
- Fu, H.; Ji, R.; Hu, P.; Wang, Y.; Wu, G.; Tan, J. Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation. Sensors 2018, 18, 2768. [Google Scholar] [CrossRef] [PubMed]
- Chang, D.; Wang, J.; Hu, P.; Tan, J. Zoom into picometer: A picoscale equivalent phase-difference-generating method for testing heterodyne interferometers without ultraprecision stages. Opt. Eng. 2019, 58, 064101. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
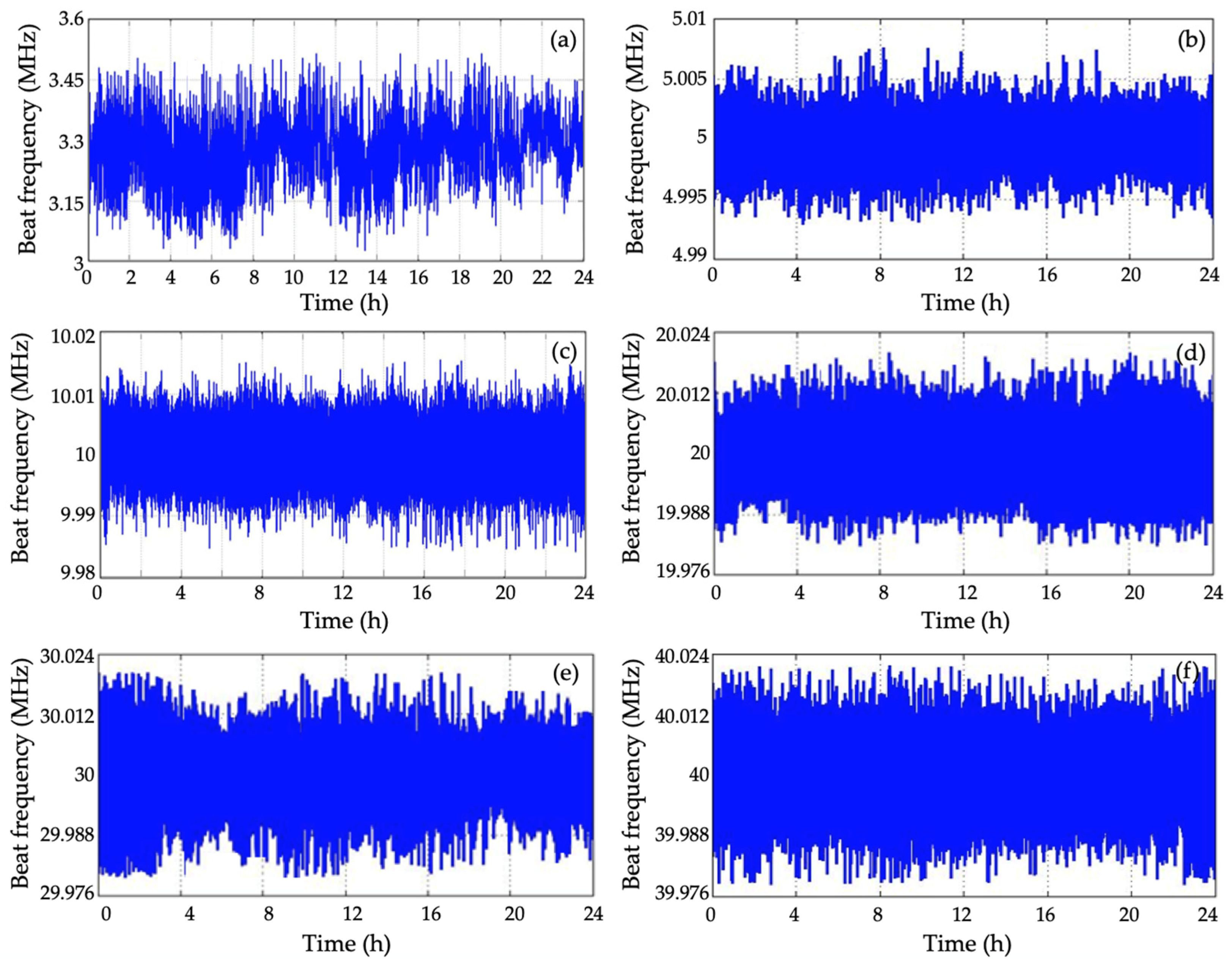
| Offset-Locked Frequency (MHz) | Time (h) | Frequency Center (MHz) | Peak-to-Peak Beat Frequency Drift (kHz) | |
|---|---|---|---|---|
| 5 | 24 | 5.00109 | 12 | 0.3 |
| 10 | 24 | 9.99997 | 28 | 0.4 |
| 20 | 24 | 20.00021 | 34 | 0.7 |
| 30 | 24 | 30.00035 | 38 | 0.5 |
| 40 | 24 | 39.99996 | 40 | 0.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Yin, Z.; Yang, R.; Hu, P.; Li, J.; Tan, J. Design for a Highly Stable Laser Source Based on the Error Model of High-Speed High-Resolution Heterodyne Interferometers. Sensors 2020, 20, 1083. https://doi.org/10.3390/s20041083
Yang H, Yin Z, Yang R, Hu P, Li J, Tan J. Design for a Highly Stable Laser Source Based on the Error Model of High-Speed High-Resolution Heterodyne Interferometers. Sensors. 2020; 20(4):1083. https://doi.org/10.3390/s20041083
Chicago/Turabian StyleYang, Hongxing, Ziqi Yin, Ruitao Yang, Pengcheng Hu, Jing Li, and Jiubin Tan. 2020. "Design for a Highly Stable Laser Source Based on the Error Model of High-Speed High-Resolution Heterodyne Interferometers" Sensors 20, no. 4: 1083. https://doi.org/10.3390/s20041083
APA StyleYang, H., Yin, Z., Yang, R., Hu, P., Li, J., & Tan, J. (2020). Design for a Highly Stable Laser Source Based on the Error Model of High-Speed High-Resolution Heterodyne Interferometers. Sensors, 20(4), 1083. https://doi.org/10.3390/s20041083