Aggregate Impact of Anomalous Noise Events on the WASN-Based Computation of Road Traffic Noise Levels in Urban and Suburban Environments





Abstract
1. Introduction
2. Related Work
3. Impact Analysis Methodology
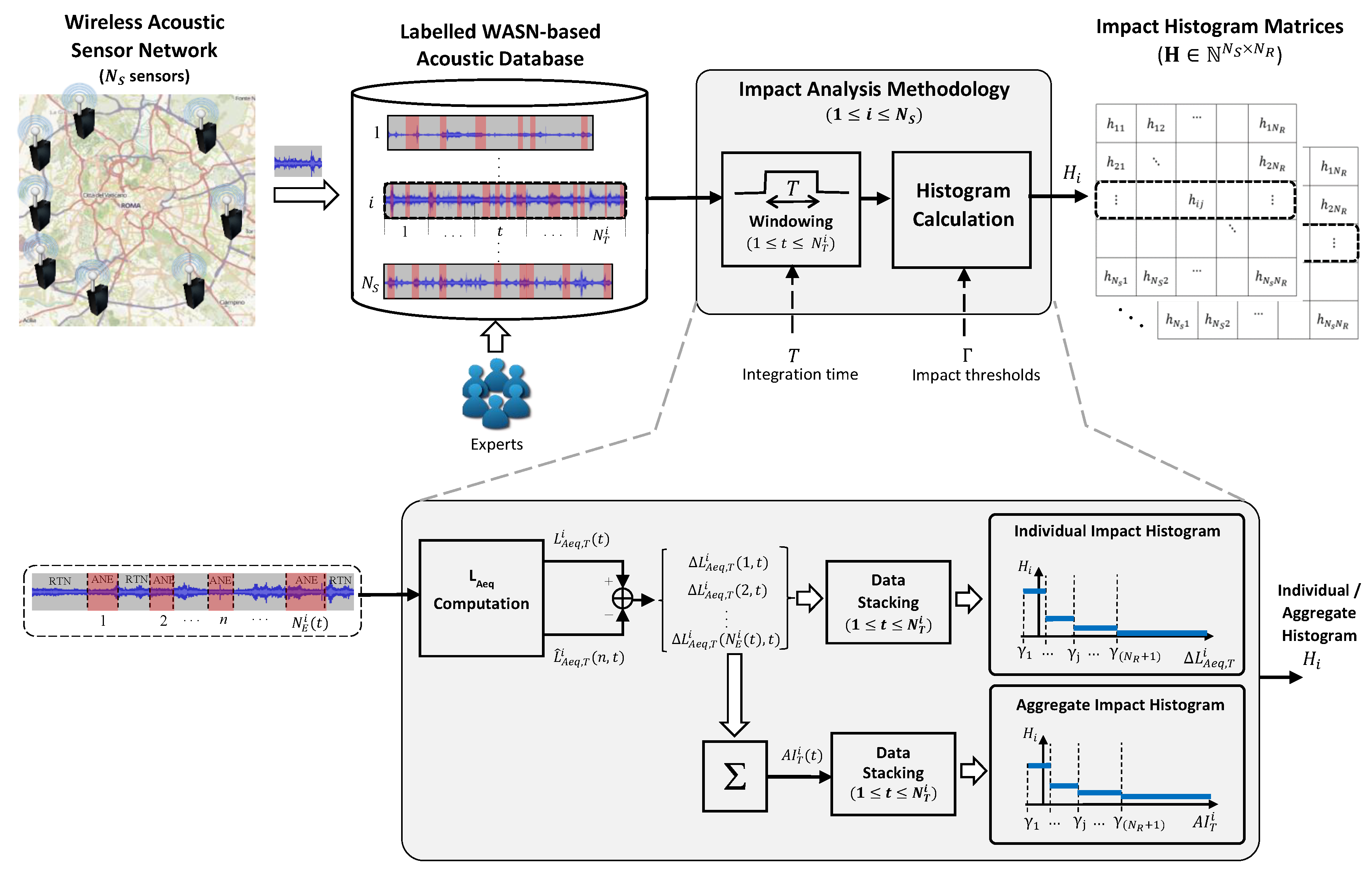
- Aggregate impact computation per sensorThe Aggregate Impact (AI) of several acoustic events can be defined as the accumulated contribution of the individual impacts of all the ANEs present within a period of time and sensor node.It is denoted as , where indexes i and t respectively represent the sensor number, for , and the integration time period, for , being the total number of integration time periods of length T considered for its computation given a sensor i, and it is defined aswhere is the individual impact of the n-th ANE on the computation within the integration time period t, being the total number of ANEs present in that time period for sensor i, and it is computed asbeing the total A-weighted equivalent sound level in the integration period of interest t for the i-th sensor (i.e., considering RTN and all ANEs found in that t), and the corresponding noise level after removing the n-th ANE from the measurement through the linear interpolation of the values of the previous and subsequent RTN samples (the reader is referred to [37] for further details).To that effect, first, the audio data collected from sensor i is divided into windows of T seconds length (see Figure 1). Next, the A-weighted equivalent noise levels with and without ANEs are computed, whose difference gives the n-th individual ANE impact . Then, the aggregate impact of window t is obtained by accumulating the individual impacts of all the ANEs it contains.
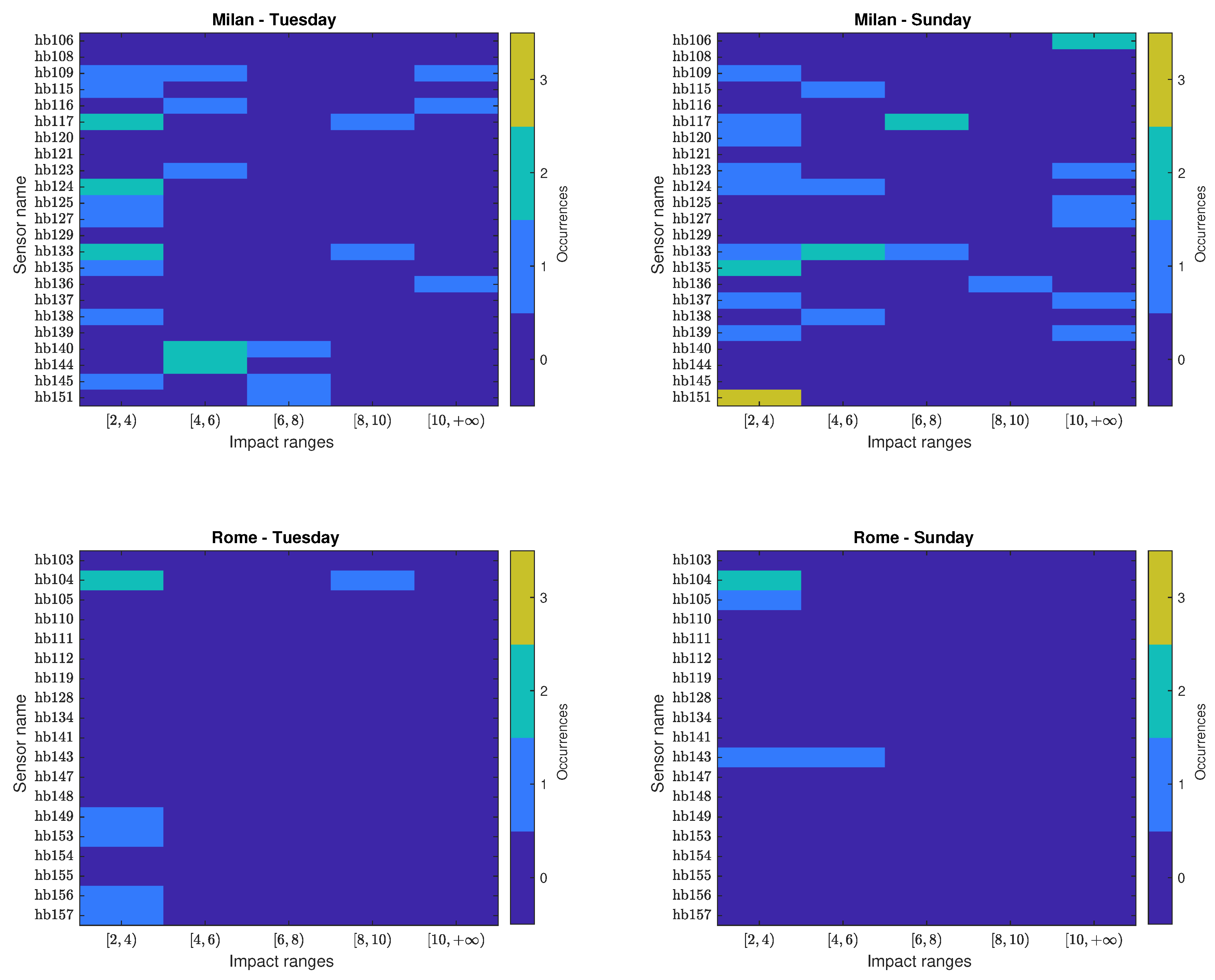
- Range-based impact analysis per sensorThe analysis methodology also aims at categorizing the relevance of both individual and aggregate impacts according to impact ranges (in dB) delimited by a predefined set of impact thresholds , and it is computed aswhere is defined as the impact range where , for .This information is statistically analyzed through the histograms obtained for each sensor (see Figure 1) in the impact histogram matrix , being the number of occurrences of ANEs that account for an impact within observed in the i-th sensor as followswherewith being the indicator function defined for the interval range asNotice that rows of (denoted as in Equation (4)) correspond to the impact histograms obtained from each i sensor.
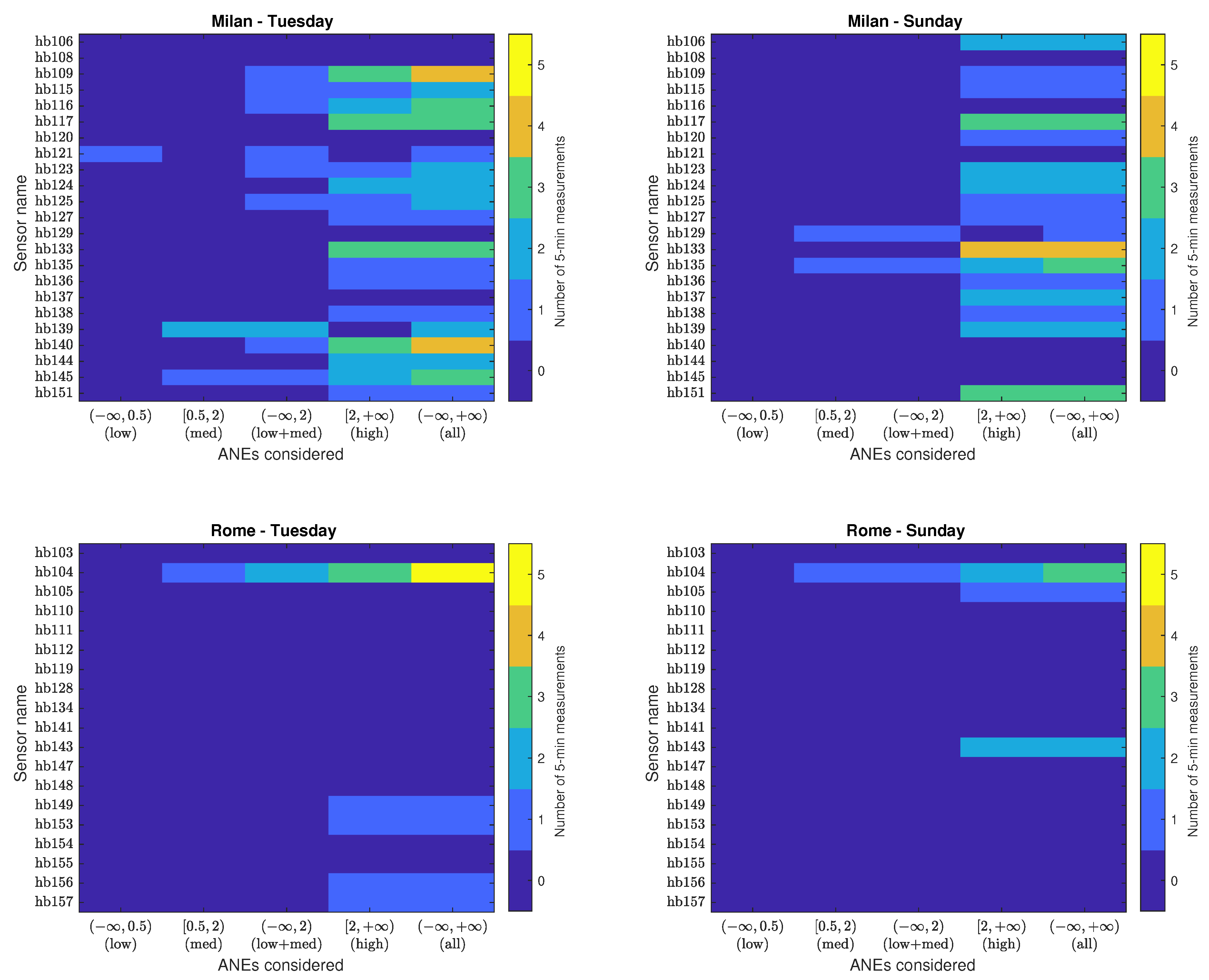
- Analysis of the critical aggregate impacts per impact range and sensorTo complement the previous analyses, it is also interesting to identify the origin of critical AIs for those cases that surpass the critical threshold . To that effect, the aggregate impact of ANEs for a given integration time period and sensor is computed considering only those individual ANEs which belongs to a particular impact range (i.e., ) as followswhere represents the subset of ANE indices within t which individual impact belongs to impact range .Finally, the critical AI histogram matrix is defined as a particular case of (see Equation (4)) considering the matrix components asthe being a particular case of the indicator function defined by (see Equation (6)), where defines the range of critical impacts, as represents the threshold of a non-tolerable deviation of the A-weighted equivalent road traffic noise levels.
4. Experiments and Results
4.1. WASN-Based Environmental Databases
4.2. Individual Impact of ANEs
4.3. Aggregate Impact of ANEs
4.4. Critical Aggregate Impacts Per Level
5. Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Aggregate Impact |
| ANE | Anomalous Noise Event |
| ANED | Anomalous Noise Event Detection |
| CNOSSOS-EU | Common Noise Assessment Methods in Europe |
| DYNAMAP | Dynamic Noise Mapping |
| END | European Noise Directive |
| EU | European Union |
| RTN | Road Traffic Noise |
| SNR | Signal-to-Noise Ratio |
| SONYC | Sounds of New York City |
| WASN | Wireless Acoustic Sensor Network |
| WG-AEN | European Commission Working Group Assessment of Exposure to Noise |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Id | Sensor Location Description |
|---|---|
| hb106 | 1-lane/1-lane road with connection with 1 line road, area with parks nearby, no shops |
| hb108 | 1-lane/1-lane road, in front University exit, no shops |
| hb109 | 3-lane/3-lane road, near crossing with tramway and 1 line+2 line/2 line+1 line road, shopping and coffe/restaurant area |
| hb115 | 1-lane road with shopping in front |
| hb116 | 1-lane/1-lane road with connection with 1-lane road, residential area |
| hb117 | 3-lane/3-lane road, near school, area with parks nearby, no shops |
| hb120 | 1-lane/1-lane road, residential area, no shops |
| hb121 | 2-lane/2-lane road, connection with 1-lane road, University area, no shops |
| hb123 | 2-lane/2-lane road with hotel and traffic light nearby |
| hb124 | 1-lane road, no shops |
| hb125 | 1-lane road with connection with 1-lane/1-lane road, mix of residential with some shops |
| hb127 | 1-lane road near bifurcation with 1 line road, some shop nearby |
| hb129 | 1-lane/1-lane road, bike line, connection with 1-lane road, some shop |
| hb133 | 1-lane road, residential area, no shops, little park area in front |
| hb135 | 1-lane road with connection with 1-lane road (low speed), near University campus (students), no shops, in front of park area |
| hb136 | 1-lane/1-lane road with connection with 1-lane road, area with parks nearby, no shops |
| hb137 | 1-lane road with connection with 1 line road, in front of park, residential area, no shops |
| hb138 | 1-lane road near connection with other 1-lane road, no shops |
| hb139 | 1-lane road, residential area, some shop/enterprise |
| hb140 | 2-lane/2-lane road with parking area and traffic light with crossing nearby, no shops near and high traffic |
| hb144 | 1-lane road in residential area, one shop far away |
| hb145 | 1-lane road, in front of park |
| hb151 | 1-lane/1-lane road, bike line, some shop and restaurant |
| Sensor Id | Sensor Location Description |
|---|---|
| hb103 | Highway with 3-lane/3-lane |
| hb104 | Major road with 2-lane each direction crossing a highway under bridge (out of major ring) |
| hb105 | Highway with 4-lane (only 1 direction, and near exits/crossings) |
| hb110 | Highway with 3-lane/3-lane |
| hb111 | Highway with 3-lane/3-lane |
| hb112 | Highway with 3-lane/3-lane (near exit and near crossings) |
| hb119 | Highway with 3-lane/3-lane |
| hb128 | Highway with 3-lane/3-lane |
| hb134 | Highway with 4-lane/4-lane (near bridge and crossings) |
| hb141 | Highway with 5-lane/5-lane (near crossings) |
| hb143 | Highway with 2-lane/2-lane (out of major ring) |
| hb147 | Highway with 3-lane/3-lane |
| hb148 | Highway with 3-lane/3-lane |
| hb149 | Highway with 3-lane (near tunnel) |
| hb153 | Major road with 2-lane each direction crossing a highway under bridge (out of major ring) |
| hb154 | Highway with 4-lane/4-lane |
| hb155 | Highway with 2-lane (near connection but out major ring) plus 1 road same sense next to |
| hb156 | Highway with 3-lane/3-lane |
| hb157 | Highway with 5-lane/5-lane |
References
- Directive, E.U. Directive 2002/49/EC of the European Parliament and the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Communities 2002, L 189/12. [Google Scholar]
- World Health Organization Regional Office for Europe. Burden of Disease from Environmental Noise: Quantification of Healthy Life Years Lost in Europe 2011. Available online: https://www.who.int/quantifying_ehimpacts/publications/e94888/en (accessed on 21 January 2020).
- World Health Organization Regional Office for Europe. Environmental Noise Guidelines for the European Region 2018. Available online: https://apps.who.int/iris/handle/10665/279952 (accessed on 21 January 2020).
- Licitra, G.; Ascari, E.; Fredianelli, L. Prioritizing Process in Action Plans: a Review of Approaches. Curr. Pollut. Rep. 2017, 3, 151–161. [Google Scholar] [CrossRef]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU); Report EUR 25379 EN; Publications Office of the European Union: Luxembourg, 2002; pp. 1–180. [Google Scholar]
- King, E.A.; Murphy, E.; Rice, H.J. Implementation of the EU environmental noise directive: Lessons from the first phase of strategic noise mapping and action planning in Ireland. J. Environ. Manag. 2011, 92, 756–764. [Google Scholar] [CrossRef] [PubMed]
- Carrier, M.; Apparicio, P.; Séguin, A.M.; Crouse, D. School locations and road transportation nuisances in Montreal: An environmental equity diagnosis. Transp. Policy 2019, 81, 302–310. [Google Scholar] [CrossRef]
- Tsai, K.T.; Lin, M.D.; Lin, Y.H. Noise exposure assessment and prevention around high-speed rail. Int. J. Environ. Sci. Technol. 2019, 16, 4833–4842. [Google Scholar] [CrossRef]
- Morley, D.; de Hoogh, K.; Fecht, D.; Fabbri, F.; Bell, M.; Goodman, P.; Elliott, P.; Hodgson, S.; Hansell, A.; Gulliver, J. International scale implementation of the CNOSSOS-EU road traffic noise prediction model for epidemiological studies. Environ. Pollut. 2015, 206, 332–341. [Google Scholar] [CrossRef] [PubMed]
- Botteldooren, D.; Dekoninck, L.; Gillis, D. The influence of traffic noise on appreciation of the living quality of a neighborhood. Int. J. Environ. Res. Public Health 2011, 8, 777–798. [Google Scholar] [CrossRef] [PubMed]
- Alberts, W.; Roebben, M. Road Traffic Noise Exposure in Europe in 2012 based on END data. In Proceedings of the 45th International Congress and Exposition on Noise Control Engineering (INTER-NOISE 2016), Hamburg, Germany, 21–24 August 2016; pp. 1236–1247. [Google Scholar]
- Garcia, A.; Faus, L. Statistical analysis of noise levels in urban areas. Appl. Acoust. 1991, 34, 227–247. [Google Scholar] [CrossRef]
- Alsina-Pagès, R.M.; Alías, F.; Socoró, J.C.; Orga, F.; Benocci, R.; Zambon, G. Anomalous events removal for automated traffic noise maps generation. Appl. Acoust. 2019, 151, 183–192. [Google Scholar] [CrossRef]
- European Commission Working Group Assessment of Exposure to Noise (WG-AEN). Good Practice Guide for Strategic Noise Mapping and the Production of Associated Data on Noise Exposure Ver.2, 13 August. Technical Report. 2007. Available online: https://www.lfu.bayern.de/laerm/eg_umgebungslaermrichtlinie/doc/good_practice_guide_2007.pdf (accessed on 21 January 2020).
- De Coensel, B.; Botteldooren, D. A model of saliency-based auditory attention to environmental sound. In Proceedings of the 20th International Congress on Acoustics (ICA-2010), Sydney, Australia, 23–27 August 2010; pp. 1–8. [Google Scholar]
- Salamon, J.; Jacoby, C.; Bello, J.P. A dataset and taxonomy for urban sound research. In Proceedings of the 22nd ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 November 2014; pp. 1041–1044. [Google Scholar]
- Foggia, P.; Petkov, N.; Saggese, A.; Strisciuglio, N.; Vento, M. Reliable detection of audio events in highly noisy environments. Pattern Recognit. Lett. 2015, 65, 22–28. [Google Scholar] [CrossRef]
- Stowell, D.; Giannoulis, D.; Benetos, E.; Lagrange, M.; Plumbley, M.D. Detection and Classification of Acoustic Scenes and Events. IEEE Trans. Multimedia 2015, 17, 1733–1746. [Google Scholar] [CrossRef]
- Socoró, J.C.; Ribera, G.; Sevillano, X.; Alías, F. Development of an Anomalous Noise Event Detection Algorithm for dynamic road traffic noise mapping. In Proceedings of the 22nd International Congress on Sound and Vibration, Florence, Italy, 12–16 July 2015; pp. 1–8. [Google Scholar]
- Salamon, J.; MacConnell, D.; Cartwright, M.; Li, P.; Bello, J.P. Scaper: A library for soundscape synthesis and augmentation. In Proceedings of the 2017 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 15–18 October 2017; pp. 344–348. [Google Scholar]
- Alías, F.; Socoró, J.C. Description of anomalous noise events for reliable dynamic traffic noise mapping in real-life urban and suburban soundscapes. Appl. Sci. 2017, 7, 146. [Google Scholar] [CrossRef]
- Botteldooren, D.; De Coensel, B.; Oldoni, D.; Van Renterghem, T.; Dauwe, S. Sound monitoring networks new style. In Proceedings of Acoustics 2011: Breaking New Ground – Proceedings of the Annual Conference of the Australian Acoustical Society, Gold Coast, Australia, 2–4 November 2011. [Google Scholar]
- Manvell, D. Utilising the Strengths of Different Sound Sensor Networks in Smart City Noise Management. In Proceedings of the EuroNoise 2015, EAA-NAG-ABAV, Maastrich, Netherlands, 31 May–3 June 2015; pp. 2305–2308. [Google Scholar]
- Alías, F.; Alsina-Pagès, R.M. Review of Wireless Acoustic Sensor Networks for Environmental Noise Monitoring in Smart Cities. J. Sens. 2019, 2019, 13. [Google Scholar] [CrossRef]
- Camps, J. Barcelona noise monitoring network. In Proceedings of the EuroNoise 2015, EAA-NAG-ABAV, Maastrich, The Netherlands, 1 May–3 June 2015; pp. 2315–2320. [Google Scholar]
- Segura-Garcia, J.; Pérez Solano, J.J.; Cobos Serrano, M.; Navarro Camba, E.A.; Felici-Castell, S.; Soriano Asensi, A.; Montes Suay, F. Spatial Statistical Analysis of Urban Noise Data from a WASN Gathered by an IoT System: Application to a Small City. Appl. Sci. 2016, 6, 380. [Google Scholar] [CrossRef]
- Nencini, L.; De Rosa, P.; Ascari, E.; Vinci, B.; Alexeeva, N. SENSEable Pisa: A wireless sensor network for real-time noise mapping. In Proceedings of the EuroNoise 2012, Czech Acoustical Society, Prague, Czech Republic, 10–13 June 2012. [Google Scholar]
- Bartalucci, C.; Borchi, F.; Carfagni, M.; Furferi, R.; Governi, L. Design of a prototype of a smart noise monitoring system. In Proceedings of the 24th International Congress on Sound and Vibration (ICSV24); The International Institute of Acoustics and Vibration, London, UK, 23–27 July 2017. [Google Scholar]
- Rainham, D. A wireless sensor network for urban environmental health monitoring: UrbanSense. IOP Conf. Ser. Earth Environ. Sci. 2016, 34, 012028. [Google Scholar] [CrossRef]
- Sevillano, X.; Socoró, J.C.; Alías, F.; Bellucci, P.; Peruzzi, L.; Radaelli, S.; Coppi, P.; Nencini, L.; Cerniglia, A.; Bisceglie, A.; et al. DYNAMAP—Development of low cost sensors networks for real time noise mapping. Noise Mapp. 2016, 3, 172–189. [Google Scholar] [CrossRef]
- Bello, J.P.; Silva, C.; Nov, O.; Dubois, R.L.; Arora, A.; Salamon, J.; Mydlarz, C.; Doraiswamy, H. SONYC: A System for Monitoring, Analyzing, and Mitigating Urban Noise Pollution. Commun. ACM 2019, 62, 68–77. [Google Scholar] [CrossRef]
- Zambon, G.; Benocci, R.; Bisceglie, A.; Roman, H.E.; Bellucci, P. The LIFE DYNAMAP project: Towards a procedure for dynamic noise mapping in urban areas. Appl. Acoust. 2017, 124, 52–60. [Google Scholar] [CrossRef]
- Zambon, G.; Benocci, R.; Bisceglie, A. Development of optimized algorithms for the classification of networks of road stretches into homogeneous clusters in urban areas. In Proceedings of the 22nd International Congress on Sound and Vibration (ICSV22). International Institute of Acoustics and Vibrations, Florence, Italy, 12–16 July 2015; pp. 1–8. [Google Scholar]
- Bellucci, P.; Peruzzi, L.; Zambon, G. LIFE DYNAMAP project: The case study of Rome. Appl. Acoust. 2017, 117, 193–206. [Google Scholar] [CrossRef]
- Benocci, R.; Bellucci, P.; Peruzzi, L.; Bisceglie, A.; Angelini, F.; Confalonieri, C.; Zambon, G. Dynamic Noise Mapping in the Suburban Area of Rome (Italy). Environments 2019, 6, 79. [Google Scholar] [CrossRef]
- Socoró, J.C.; Alías, F.; Alsina-Pagès, R.M. An Anomalous Noise Events Detector for Dynamic Road Traffic Noise Mapping in Real-Life Urban and Suburban Environments. Sensors 2017, 17, 2323. [Google Scholar] [CrossRef] [PubMed]
- Orga, F.; Alías, F.; Alsina-Pagès, R.M. On the Impact of Anomalous Noise Events on Road Traffic Noise Mapping in Urban and Suburban Environments. Int. J. Environ. Res. Public Health 2017, 15, 13. [Google Scholar] [CrossRef] [PubMed]
- Socoró, J.C.; Alsina-Pagès, R.M.; Alías, F.; Orga, F. Adapting an Anomalous Noise Events Detector for Real-Life Operation in the Rome Suburban Pilot Area of the DYNAMAP’s Project. In Proceedings of the EuroNoise 2018, EAA—HELINA, Heraklion, Crete, Greece, 27–31 May 2018; pp. 693–698. [Google Scholar]
- Alías, F.; Socoró, J.C.; Orga, F.; Alsina-Pagès, R.M. Characterization of a WASN-Based Urban Acoustic Dataset for the Dynamic Mapping of Road Traffic Noise. Available online: https://www.researchgate.net/publication/338103848_Characterization_of_A_WASN-Based_Urban_Acoustic_Dataset_for_the_Dynamic_Mapping_of_Road_Traffic_Noise (accessed on 22 January 2020). [CrossRef]
- Alsina-Pagès, R.M.; Orga, F.; Alías, F.; Socoró, J.C. A WASN-Based Suburban Dataset for Anomalous Noise Event Detection on Dynamic Road-Traffic Noise Mapping. Sensors 2019, 19, 2480. [Google Scholar] [CrossRef] [PubMed]
- Giannoulis, D.; Stowell, D.; Benetos, E.; Rossignol, M.; Lagrange, M.; Plumbley, M.D. A database and challenge for acoustic scene classification and event detection. In Proceedings of the 21st European Signal Processing Conference (EUSIPCO 2013), Marrakech, Morocco, 9–13 September 2013. [Google Scholar]
- Mesaros, A.; Heittola, T.; Virtanen, T. Metrics for Polyphonic Sound Event Detection. Appl. Sci. 2016, 6, 162. [Google Scholar] [CrossRef]
- Alías, F.; Socoró, J.C.; Sevillano, X. A Review of Physical and Perceptual Feature Extraction Techniques for Speech, Music and Environmental Sounds. Appl. Sci. 2016, 6, 143. [Google Scholar] [CrossRef]
- Zhang, J.; Ding, W.; He, L. Data augmentation and prior knowledge-based regularization for sound event localization and detection. Tech. Report of Detection and Classification of Acoustic Scenes and Events (DCASE2019 Challenge), Online, 4 March–30 June 2019. Available online: http://dcase.community/documents/challenge2019/technical_reports/DCASE2019_He_97.pdf (accessed on 21 January 2012).
- Nakajima, Y.; Sunohara, M.; Naito, T.; Sunago, N.; Ohshima, T.; Ono, N. DNN-based Environmental Sound Recognition with Real-recorded and Artificially-mixed Training Data. In Proceedings of the 45th International Congress and Exposition on Noise Control Engineering (INTER-NOISE 2016), Hamburg, Germany, 21–24 August 2016; pp. 3164–3173. [Google Scholar]
- Koizumi, Y.; Saito, S.; Yamaguchi, M.; Murata, S.; Harada, N. Batch Uniformization for Minimizing Maximum Anomaly Score of DNN-Based Anomaly Detection in Sounds. In Proceedings of the 2019 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), New Paltz, NY, USA, 20–23 October 2019. [Google Scholar]
- Fonseca, E.; Plakal, M.; Font, F.; Ellis, D.P.; Favory, X.; Pons, J.; Serra, X. General-purpose Tagging of Freesound Audio with AudioSet Labels: Task Description, Dataset, and Baseline. In Proceedings of the Detection and Classification of Acoustic Scenes and Events 2018 Workshop (DCASE2018), Surrey, UK, 19–20 November 2018; pp. 69–73. [Google Scholar]
- Schauerte, B.; Stiefelhagen, R. Wow! Bayesian surprise for salient acoustic event detection. In Proceedings of the 38th IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP2013), Vancouver, BC, Canada, 26–31 May 2013; pp. 6402–6406. [Google Scholar]






| Label | Suburban | Urban | Description |
|---|---|---|---|
| Counts (%) | Counts (%) | ||
| airp | 0.1 | 1 | Noise of airplanes and helicopters |
| alrm | 0.2 | 0.3 | Sound of an alarm or a vehicle beep moving backwards |
| bell | 0 | 1.2 | Church bells |
| bike | <0.1 | 3.6 | Sound of bikes and bike chains |
| bird | 15.1 | 14.7 | Birdsong |
| blin | 0 | <0.1 | Opening and closing of a blind |
| brak | 23.1 | 12.7 | Brakes and conveyor belts |
| busd | 2.8 | 1.1 | Opening bus door (or tramway), depressurized air |
| dog | 0 | 2.5 | Barking of dogs |
| door | 2.6 | 14.7 | Closing doors (vehicle or house) |
| glas | 0 | 0.1 | Sound of glass crashing |
| horn | 6.7 | 3.7 | Horns of vehicles (cars, motorbikes, trucks, etc.) |
| inte | 0.3 | 0.2 | Interfering signal from an industry or human machine |
| musi | <0.1 | 0.6 | Music in car or in the street |
| peop | 0 | 22.2 | Sounds of people chatting, laughing, coughing, sneezing, etc. |
| rain | 23.7 | 0.4 | Sound of heavy rain |
| rubb | 0 | 0.1 | Rubbish service (engines and grabbing system) |
| sire | 1.8 | 0.7 | Sirens (ambulances, police, etc.) |
| sqck | 0 | 0.8 | Squeak sound of door hinges |
| step | 0 | 13.7 | Sounds of steps |
| thun | 7.4 | <0.1 | Thunderstorm |
| trck | 11.9 | 0 | Noise when trucks or vehicles with heavy load passed over a bump. |
| tram | 0 | 0.7 | Stop, start and passby sounds of tramways |
| tran | 2.7 | <0.1 | Sound of trains |
| trll | 0 | 1 | Sound of wheels of suitcases (trolley) |
| stru | 1.4 | 0 | Noise of highway portals structure caused by vibration of trucks passbys |
| wind | 0 | <0.1 | Noise of wind (movement of the leaves of trees,...) |
| wrks | 0 | 4.1 | Works in the street (e.g., saws, hammer drills, etc.) |
| Acoustic Environment | Total Duration | RTN (%) | ANE (%) | CMPLX (%) |
|---|---|---|---|---|
| Milan (Urban) | 151 h | 83.7% | 8.7% | 7.6% |
| Rome (Suburban) | 153 h 20 min | 96.5% | 1.9% | 1.6% |
| Individual Impacts | Low Impact | Medium Impact | High Impact | ||||
|---|---|---|---|---|---|---|---|
| (−∞, 0.5) dB | [0.5, 2) dB | [2, +∞) dB | |||||
| Occurrences | Activation | Occurrences | Activation | Occurrences | Activation | ||
| Count (%) | Count/ | Count (%) | Count/ | Count (%) | Count/ | ||
| Milan | Tuesday | 21,264 (99.5%) | 23/23 | 76 (0.4%) | 21/23 | 28 (0.1%) | 16/23 |
| Sunday | 15,215 (99.4%) | 23/23 | 58 (0.4%) | 20/23 | 29 (0.2%) | 16/23 | |
| Rome | Tuesday | 2105 (98.1%) | 19/19 | 33 (1.6%) | 13/19 | 7 (0.3%) | 5/19 |
| Sunday | 3415 (99.0%) | 19/19 | 31 (0.9%) | 11/19 | 5 (0.1%) | 3/19 | |
| Aggregate Impacts | Low Impact | Medium Impact | High Impact | ||||
|---|---|---|---|---|---|---|---|
| (−∞, 0.5) dB | [0.5, 2) dB | [2, +∞) dB | |||||
| Occurrences | Activation | Occurrences | Activation | Occurrences | Activation | ||
| Count (%) | Count/ | Count (%) | Count/ | Count (%) | Count/ | ||
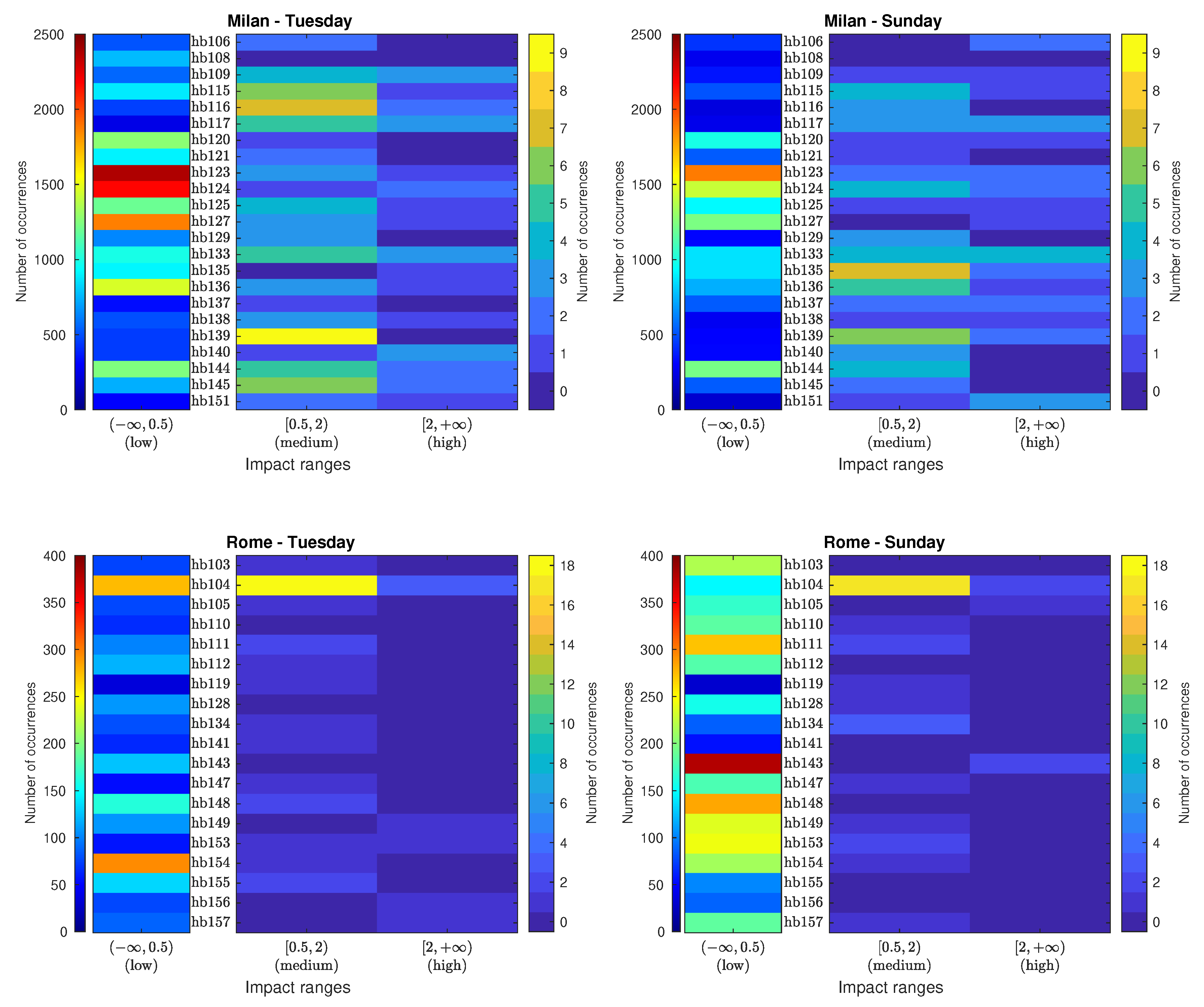
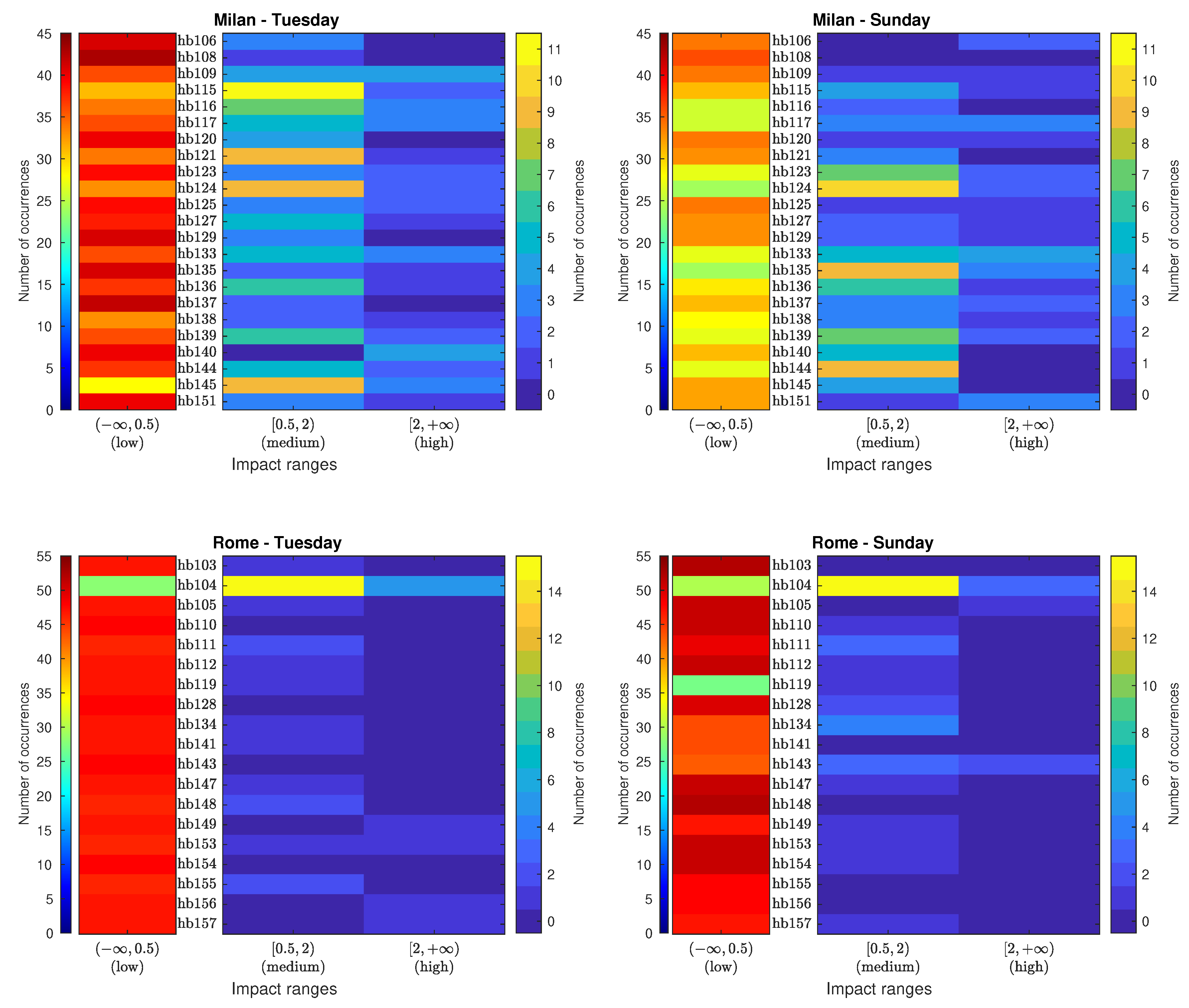
| Milan | Tuesday | 855 (85.5%) | 23/23 | 107 (10.7%) | 22/23 | 38 (3.8%) | 18/23 |
| Sunday | 693 (85.4%) | 23/23 | 88 (10.8%) | 21/23 | 31 (3.8%) | 17/23 | |
| Rome | Tuesday | 874 (95.8%) | 19/19 | 29 (3.2%) | 12/19 | 9 (1.0%) | 5/19 |
| Sunday | 887 (95.6%) | 19/19 | 35 (3.8%) | 13/19 | 6 (0.6%) | 3/19 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alías, F.; Orga, F.; Alsina-Pagès, R.M.; Socoró, J.C. Aggregate Impact of Anomalous Noise Events on the WASN-Based Computation of Road Traffic Noise Levels in Urban and Suburban Environments. Sensors 2020, 20, 609. https://doi.org/10.3390/s20030609
Alías F, Orga F, Alsina-Pagès RM, Socoró JC. Aggregate Impact of Anomalous Noise Events on the WASN-Based Computation of Road Traffic Noise Levels in Urban and Suburban Environments. Sensors. 2020; 20(3):609. https://doi.org/10.3390/s20030609
Chicago/Turabian StyleAlías, Francesc, Ferran Orga, Rosa Ma Alsina-Pagès, and Joan Claudi Socoró. 2020. "Aggregate Impact of Anomalous Noise Events on the WASN-Based Computation of Road Traffic Noise Levels in Urban and Suburban Environments" Sensors 20, no. 3: 609. https://doi.org/10.3390/s20030609
APA StyleAlías, F., Orga, F., Alsina-Pagès, R. M., & Socoró, J. C. (2020). Aggregate Impact of Anomalous Noise Events on the WASN-Based Computation of Road Traffic Noise Levels in Urban and Suburban Environments. Sensors, 20(3), 609. https://doi.org/10.3390/s20030609