Feasibility of Laser Communication Beacon Light Compressed Sensing


Abstract
1. Introduction
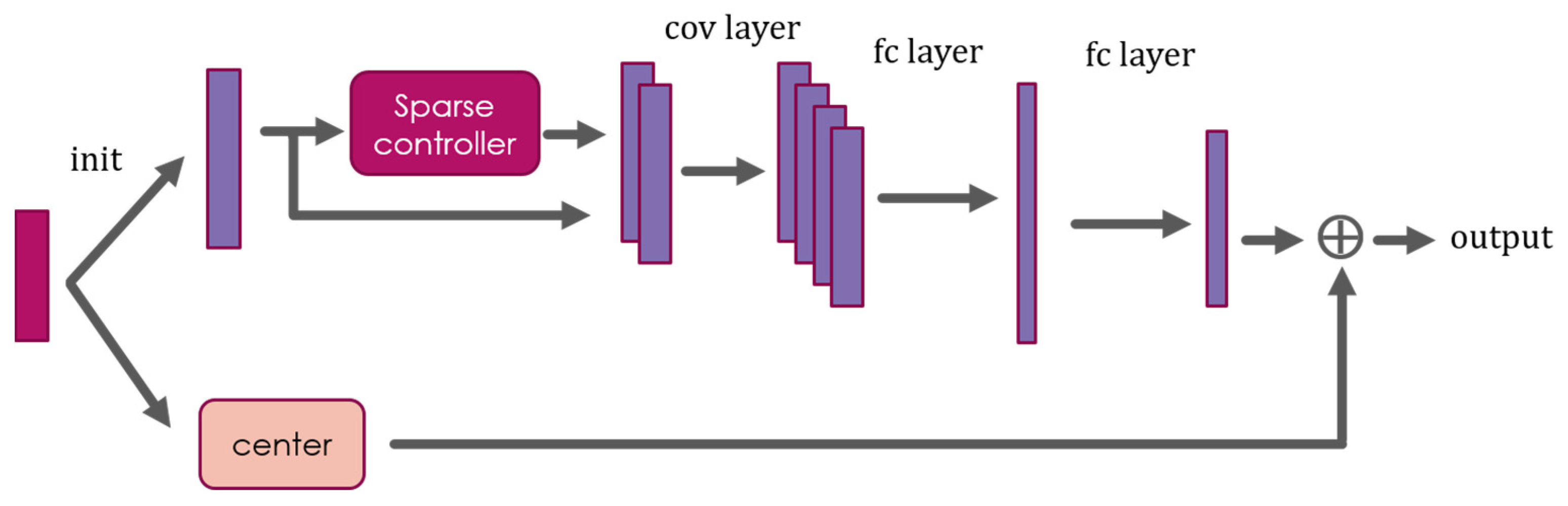
2. Beacon Light Tracking and CSD-Center Net
3. Image Storage
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ricklin, J.C.; Davidson, F.M. Atmospheric turbulence effects on a partially coherent Gaussian beam: Implications for free-space laser communication. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2002, 19, 1794–1802. [Google Scholar] [CrossRef]
- Hemmati, H. Interplanetary Laser Communications. Opt. Photonics News 2007, 18, 22–27. [Google Scholar] [CrossRef]
- Smutny, B.; Kaempfner, H.; Muehlnikel, G.; Sterr, U.; Wandernoth, B.; Heine, F.; Hildebrand, U.; Dallmann, D.; Reinhardt, M.; Freier, A.; et al. 5.6 Gbps Optical Intersatellite Communication Link; SPIE: Bellingham, DC, USA, 2009; Volume 7199. [Google Scholar]
- Sun, X.; Skillman, D.R.; Hoffman, E.D.; Mao, D.; McGarry, J.F.; Zellar, R.S.; Fong, W.H.; Krainak, M.A.; Neumann, G.A.; Smith, D.E. Free Space Laser Communication Experiments from Earth to the Lunar Reconnaissance Orbiter in Lunar Orbit. Opt. Express 2013, 21, 1865–1871. [Google Scholar] [CrossRef] [PubMed]
- Toyoshima, M.; Takayama, Y. Space-Based Laser Communication Systems and Future Trends. In Proceedings of the Conference on Lasers and Electro-Optics 2012, San Jose, CA, USA, 6 May 2012; p. JW1C.2. [Google Scholar]
- Wood, R.M. Optical Detection Theory for Laser Applications; Osche, G.R., Ed.; Wiley: New York, NY, USA, 2002; 412p, ISBN 0-471-22411-1. [Google Scholar]
- Yura, H.T.; Fields, R.A. Level crossing statistics for optical beam wander in a turbulent atmosphere with applications to ground-to-space laser communications. Appl. Opt. 2011, 50, 2875–2885. [Google Scholar] [CrossRef] [PubMed]
- Toyoshima, M.; Takahashi, N.; Jono, T.; Yamawaki, T.; Yamamoto, A. Mutual alignment errors due to the variation of wave-front aberrations in a free-space laser communication link. Opt. Express 2001, 9, 592–602. [Google Scholar] [CrossRef] [PubMed]
- Strasburg, J.D.; Harper, W.W. Impact of atmospheric turbulence on beam propagation. Proc. SPIE 2004, 5413, 93–102. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Cand’Es, E.J. An Introduction to Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal Recovery from Random Measurements via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Daubechies, I.; Defrise, M.; Mol, C.D. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint. Commun. Pure Appl. Math. 2003, 57, 1413–1457. [Google Scholar] [CrossRef]
- Baraniuk, R.; Davenport, M.; Devore, R.; Wakin, M. A Simple Proof of the Restricted Isometry Property for Random Matrices. Constr. Approx. 2008, 28, 253–263. [Google Scholar] [CrossRef]
- Figueiredo, M.A.T.; Nowak, R.D. An EM algorithm for wavelet-based image restoration. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 2003, 12, 906–916. [Google Scholar] [CrossRef] [PubMed]
- BECH, A. A fast iterative shrinkage-thresholding algorithms for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Chartrand, R.; Yin, W. Iteratively reweighted algorithms for compressive sensing. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing 2008, ICASSP 2008, Las Vegas, NV, USA, 30 March–4 April 2008. [Google Scholar]
- Needell, D.; Tropp, J.A. CoSaMP: Iterative signal recovery from incomplete and inaccurate samples. Appl. Comput. Harmon. Anal. 2009, 26, 301–321. [Google Scholar] [CrossRef]
- Carrillo, R.E.; Polania, L.F.; Barner, K.E. Iterative hard thresholding for compressed sensing with partially known support. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing 2011, Prague, Czech Republic, 22–27 May 2011. [Google Scholar]
- Blumensath, T.; Davies, M.E. On the Difference between Orthogonal Matching Pursuit and Orthogonal Least Squares; Technique Report; University of Edinburgh: Edinburgh, UK, 2007. [Google Scholar]
- Hashemi, A.; Vikalo, H. Sparse Linear Regression via Generalized Orthogonal Least-Squares. In Proceedings of the 2016 IEEE Global Conference on Signal and Information Processing, Washington, DC, USA, 7–9 December 2016. [Google Scholar]
- Zhang, J.; Ghanem, B. ISTA-Net: Interpretable Optimization-Inspired Deep Network for Image Compressive Sensing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2018, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Xu, S.; Zeng, S.; Romberg, J. Fast Compressive Sensing Recovery Using Generative Models with Structured Latent Variables. In Proceedings of the ICASSP 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019. [Google Scholar]
- Liu, R.; Zhang, Y.; Cheng, S.; Fan, X.; Luo, Z. A Theoretically Guaranteed Deep Optimization Framework for Robust Compressive Sensing MRI. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019. [Google Scholar]
- Shi, W.; Jiang, F.; Liu, S.; Zhao, D. Image Compressed Sensing using Convolutional Neural Network. IEEE Trans. Image Process. 2019, 29, 375–388. [Google Scholar] [CrossRef]
- Veen, D.V.; Jalal, A.; Price, E.; Vishwanath, S.; Dimakis, A.G. Compressed Sensing with Deep Image Prior and Learned Regularization. arXiv 2018, arXiv:abs/1806.06438. [Google Scholar]
- Takhar, D.; Laska, J.; Wakin, M.; Duarte, M.; Baron, D.; Sarvotham, S.; Kelly, K.; Baraniuk, R. A new Compressive Imaging camera architecture using optical-domain compression. Proc. IS&T/SPIE Symp. Electron. Imaging 2006. [Google Scholar] [CrossRef]
- Stern, A.; Javidi, B. Random Projections Imaging With Extended Space-Bandwidth Product. J. Disp. Technol. 2007, 3, 315–320. [Google Scholar] [CrossRef]
- Stern, A. Compressed imaging system with linear sensors. Opt. Lett. 2007, 32, 3077–3079. [Google Scholar] [CrossRef]
- Arguello, H.; Ye, P.; Arce, G.R. Spectral Aperture Code Design for Multi-Shot Compressive Spectral Imaging. In Proceedings of the International Congress of Digital Holography & Three-Dimensional Imaging, Miami, FL, USA, 12–14 April 2010. [Google Scholar]
- Marcos, D.; Lasser, T.; López, A.; Bourquard, A. Compressed imaging by sparse random convolution. Opt. Express 2016, 24, 1269–1290. [Google Scholar] [CrossRef]
- Mochizuki, F.; Kagawa, K.; Okihara, S.I.; Seo, M.W.; Zhang, B.; Takasawa, T.; Yasutomi, K.; Kawahito, S. Single-event transient imaging with an ultra-high-speed temporally compressive multi-aperture CMOS image sensor. Opt. Express 2016, 24, 4155–4176. [Google Scholar] [CrossRef] [PubMed]
- Esteban, V.; Pablo, M. Snapshot compressive imaging using aberrations. Opt. Express 2018, 26, 1206–1218. [Google Scholar]
- Javad, G.; Manish, B.; Fiorante, G.R.C.; Payman, Z.H.; Sanjay, K.; Hayat, M.M. CMOS approach to compressed-domain image acquisition. Opt. Express 2017, 25, 4076–4096. [Google Scholar]
- Zhi-Li, F.; Shu-Yan, X.U.; Jun, H.U. Design of multispectral remote sensing image compression system. Electron. Des. Eng. 2010, 1, V1–V254. [Google Scholar]
- Wang, L.; Lu, K.; Liu, P. Compressed Sensing of a Remote Sensing Image Based on the Priors of the Reference Image. IEEE Geosci. Remote Sens. Lett. 2014, 12, 736–740. [Google Scholar] [CrossRef]
- Fan, C.; Liu, P.; Wang, L. Spatiotemporal resolution enhancement via compressed sensing. In Proceedings of the Geoscience & Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 3061–3064. [Google Scholar]
- You, Y.; Li, C.; Yu, Z. Parallel frequency radar via compressive sensing. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011. [Google Scholar]
- Liechen, L.I.; Daojing, L.I.; Pan, Z. Compressed sensing application in interferometric synthetic aperture radar. Sci. China Inf. Sci. 2017, 60, 102305. [Google Scholar]
- Lustig, M.; Donoho, D.L.; Santos, J.M.; Pauly, J.M. Compressed Sensing MRI. IEEE Signal Process. Mag. 2008, 25, 72–82. [Google Scholar] [CrossRef]
- Gamper, U.; Boesiger, P.; Kozerke, S. Compressed sensing in dynamic MRI. Magn. Reson. Med. 2010, 59, 365–373. [Google Scholar] [CrossRef]
- Mun, S.; Fowler, J.E. Motion-compensated compressed-sensing reconstruction for dynamic MRI. In Proceedings of the 2013 20th IEEE International Conference on Image Processing (ICIP), Melbourne, Australia, 15–18 September 2013. [Google Scholar]
- Jiang, D.; Zhang, P.; Deng, K.; Zhu, B. The atmospheric refraction and beam wander influence on the acquisition of LEO-Ground optical communication link. J. Light Electronoptic 2014, 125, 3986–3990. [Google Scholar] [CrossRef]
- Rauhut, H. Circulant and Toeplitz matrices in compressed sensing. arXiv 2009, arXiv:abs/0902.4394. [Google Scholar]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Lane, R.G.; Glindemann, A.; Dainty, J.C. Simulation of a Kolmogorov phase screen. Waves Random Media 1992, 2, 209–224. [Google Scholar] [CrossRef]
- Frehlich, R. Simulation of laser propagation in a turbulent atmosphere. Appl. Opt. 2000, 39, 393–397. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, W.; Wu, X.; Rao, R. Equivalent refractive-index structure constant of non-Kolmogorov turbulence. Opt. Express 2015, 23, 23004–23012. [Google Scholar] [CrossRef]
- Ben-Yosef, N.; Tirosh, E.; Weitz, A.; Pinsky, E. Refractive-index structure constant dependence on height. J. Opt. Soc. Am. 1979, 69, 1616–1618. [Google Scholar] [CrossRef]
- Majda, A.J.; Chen, N. Model Error, Information Barriers, State Estimation and Prediction in Complex Multiscale Systems. Entropy 2018, 20, 644. [Google Scholar] [CrossRef] [PubMed]
- Alessandri, A.; Bagnerini, P.; Cianci, R. State Observation for Lipschitz Nonlinear Dynamical Systems Based on Lyapunov Functions and Functionals. Mathematics 2020, 8, 1424. [Google Scholar] [CrossRef]
- Toyoshima, M.; Jono, T.; Nakagawa, K.; Yamamoto, A. Optimum divergence angle of a Gaussian beam wave in the presence of random jitter in free-space laser communication systems. J. Opt. Soc. Am. A 2002, 19, 567–571. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CS Rate (%) | PSNR (dB) | Δx (pix) | E(er) (%) | |
|---|---|---|---|---|---|
| Irls | 4 | 41.3 | 16.76 | 0.1957 | 0.0979 |
| 10 | 43.7 | 14.33 | 0.2161 | 0.1081 | |
| 25 | 50.4 | 5.87 | 0.1453 | 0.0727 | |
| 50 | 52.4 | 5.86 | 0.0588 | 0.0294 | |
| ISTA-Net | 4 | 47.5 | 6.36 | 0.2372 | 0.1186 |
| 10 | 50.6 | 0.96 | 0.1297 | 0.0649 | |
| 25 | 58.1 | 0.40 | 0.0535 | 0.0268 | |
| 50 | 60.8 | 0 | 0.0213 | 0.0107 | |
| Ols | 4 | 41.1 | 12.74 | 0.2252 | 0.1126 |
| 10 | 41.5 | 16.89 | 0.2188 | 0.1094 | |
| 25 | 42.9 | 19.34 | 0.1240 | 0.0620 | |
| 50 | 50.8 | 7.22 | 0.1220 | 0.0610 | |
| FCSR | 4 | 46.3 | 8.41 | 0.2187 | 0.1094 |
| 10 | 49.9 | 1.88 | 0.1337 | 0.0669 | |
| 25 | 55.7 | 0.57 | 0.0528 | 0.0264 | |
| 50 | 59.6 | 0.03 | 0.0364 | 0.0182 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Gao, S.; Sheng, L. Feasibility of Laser Communication Beacon Light Compressed Sensing. Sensors 2020, 20, 7257. https://doi.org/10.3390/s20247257
Wang Z, Gao S, Sheng L. Feasibility of Laser Communication Beacon Light Compressed Sensing. Sensors. 2020; 20(24):7257. https://doi.org/10.3390/s20247257
Chicago/Turabian StyleWang, Zhen, Shijie Gao, and Lei Sheng. 2020. "Feasibility of Laser Communication Beacon Light Compressed Sensing" Sensors 20, no. 24: 7257. https://doi.org/10.3390/s20247257
APA StyleWang, Z., Gao, S., & Sheng, L. (2020). Feasibility of Laser Communication Beacon Light Compressed Sensing. Sensors, 20(24), 7257. https://doi.org/10.3390/s20247257