MAMPI-UWB—Multipath-Assisted Device-Free Localization with Magnitude and Phase Information with UWB Transceivers †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We design a multipath-assisted device-free localization system based on magnitude and phase measurements of multipath components.
- We derive the position error probability as a metric to compare the performance of the system before deployment.
- We refine the signal processing for extraction of magnitude and phase values from channel impulse response measurements.
- We compare the performance of a conventional DFL system to our proposed multipath-assisted DFL system using different feature vectors.
2. Related Work
3. MAMPI DFL Approach
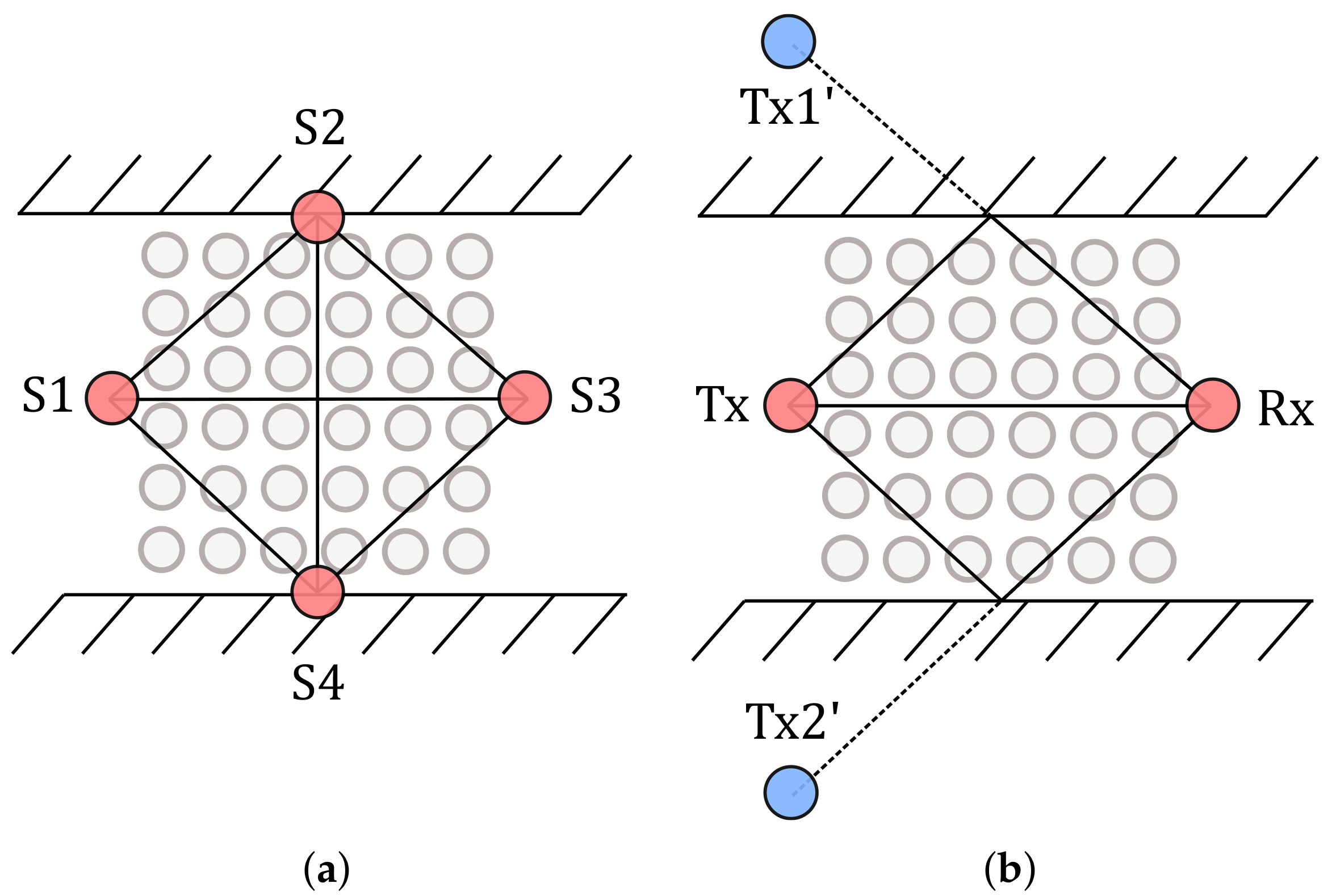
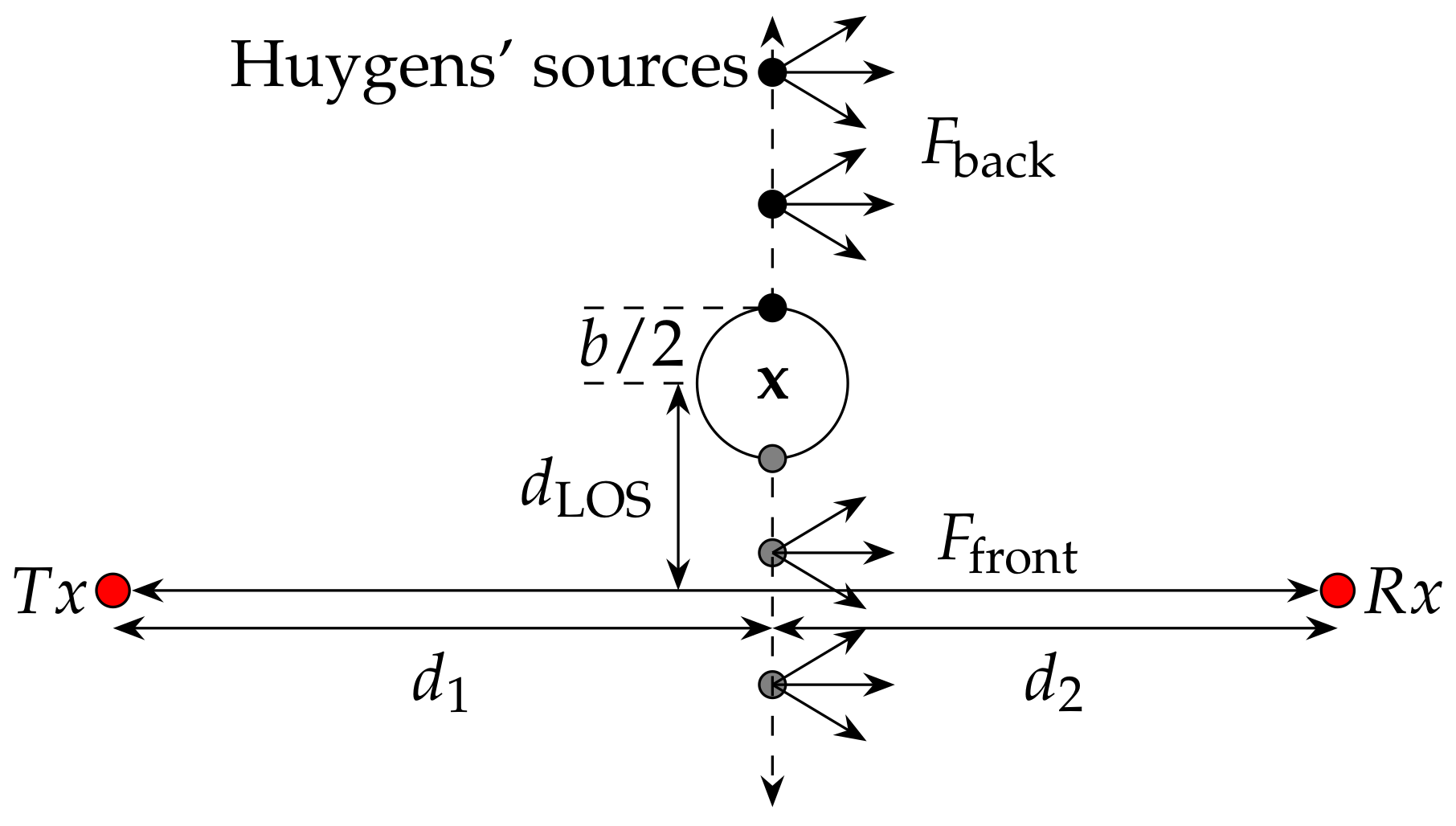
3.1. Radio Propagation Model
3.2. Position Estimation
3.3. Feature Vector Composition
3.4. Error Modeling
4. Implementation
4.1. Simulation
4.1.1. Raytracing
4.1.2. Noise Distributions
4.1.3. Description of the Algorithm
| Algorithm 1: Pseudo-code for the error modeling and Monte-Carlo simulation ©2020 IEEE, Reprinted, with permission, from [5]. |
 |
4.1.4. Simulation Setup
4.2. Measurements
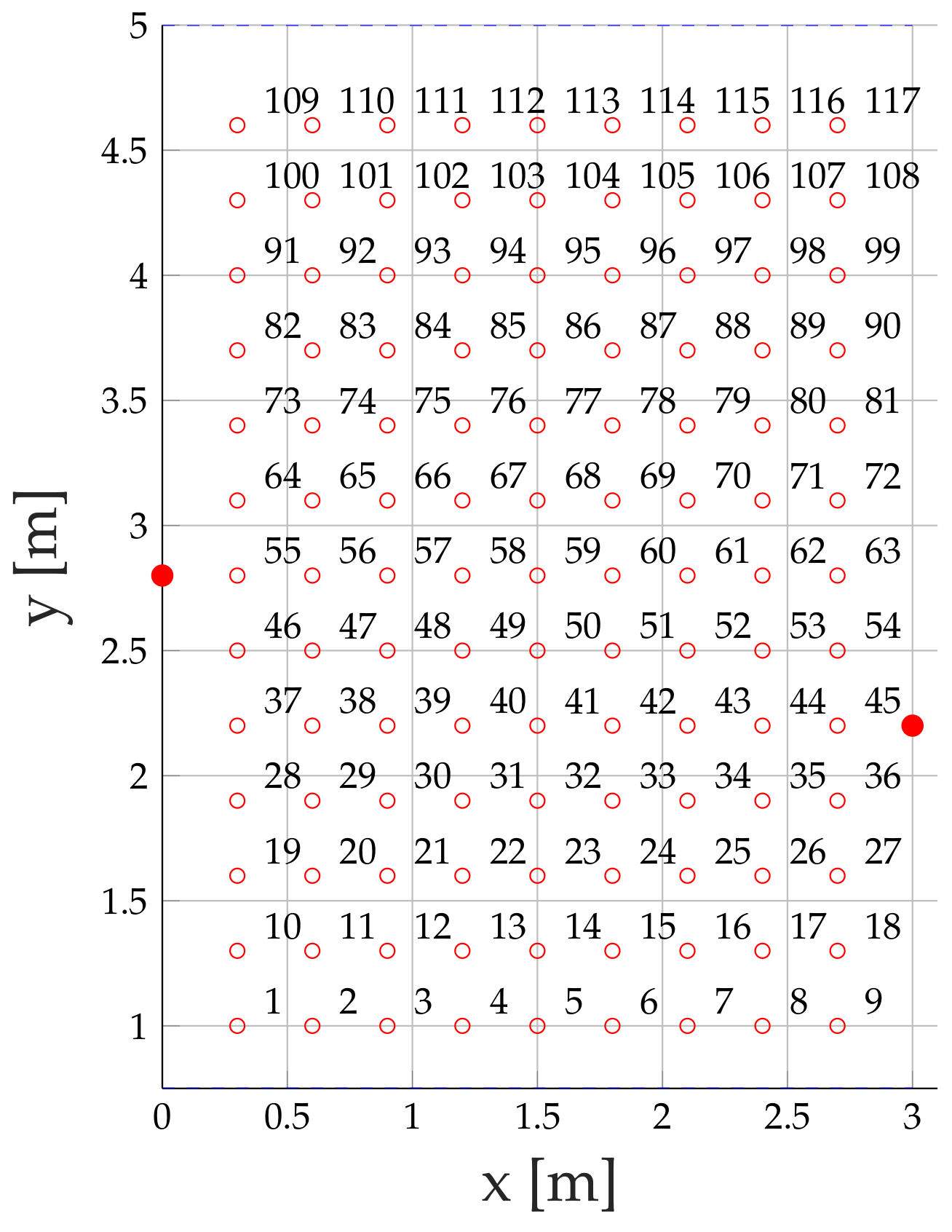
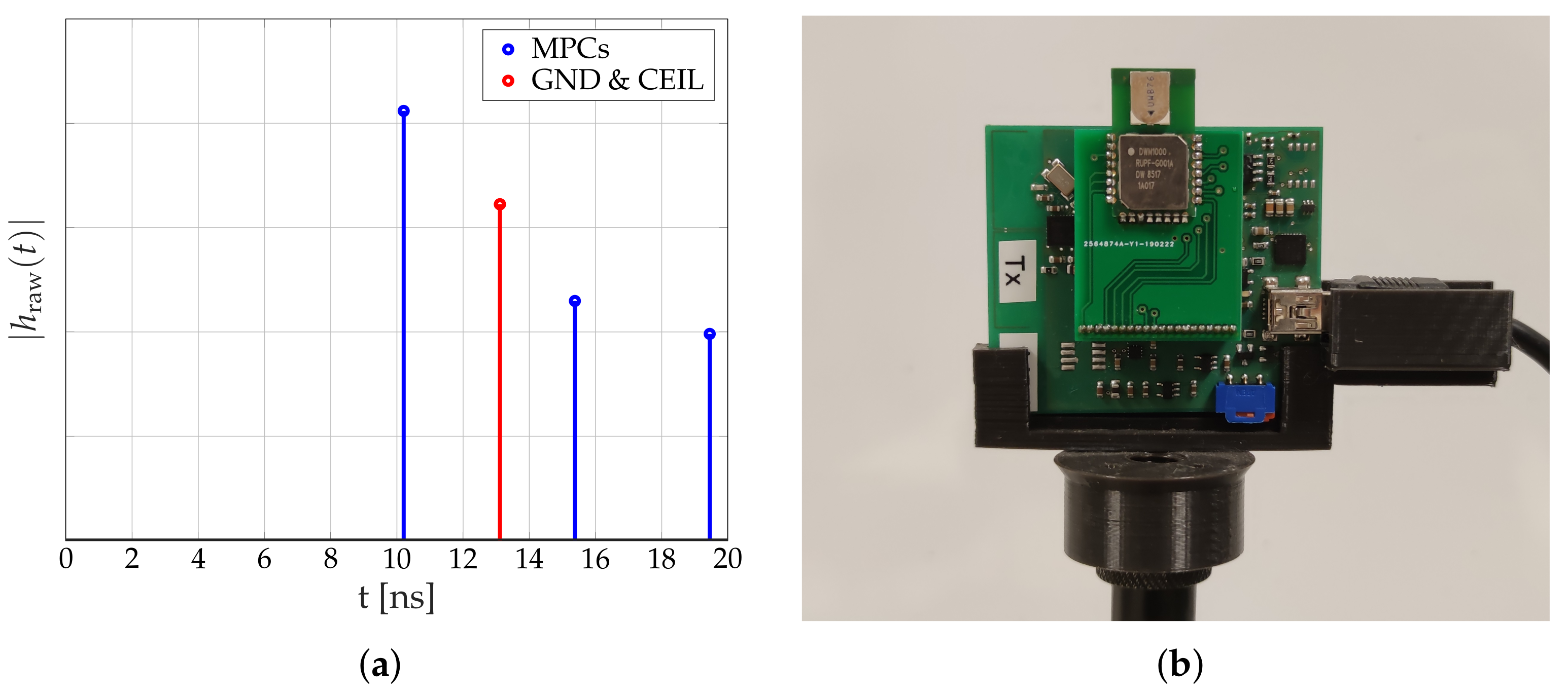
4.2.1. Measurement Setup
4.2.2. Measurement Equipment
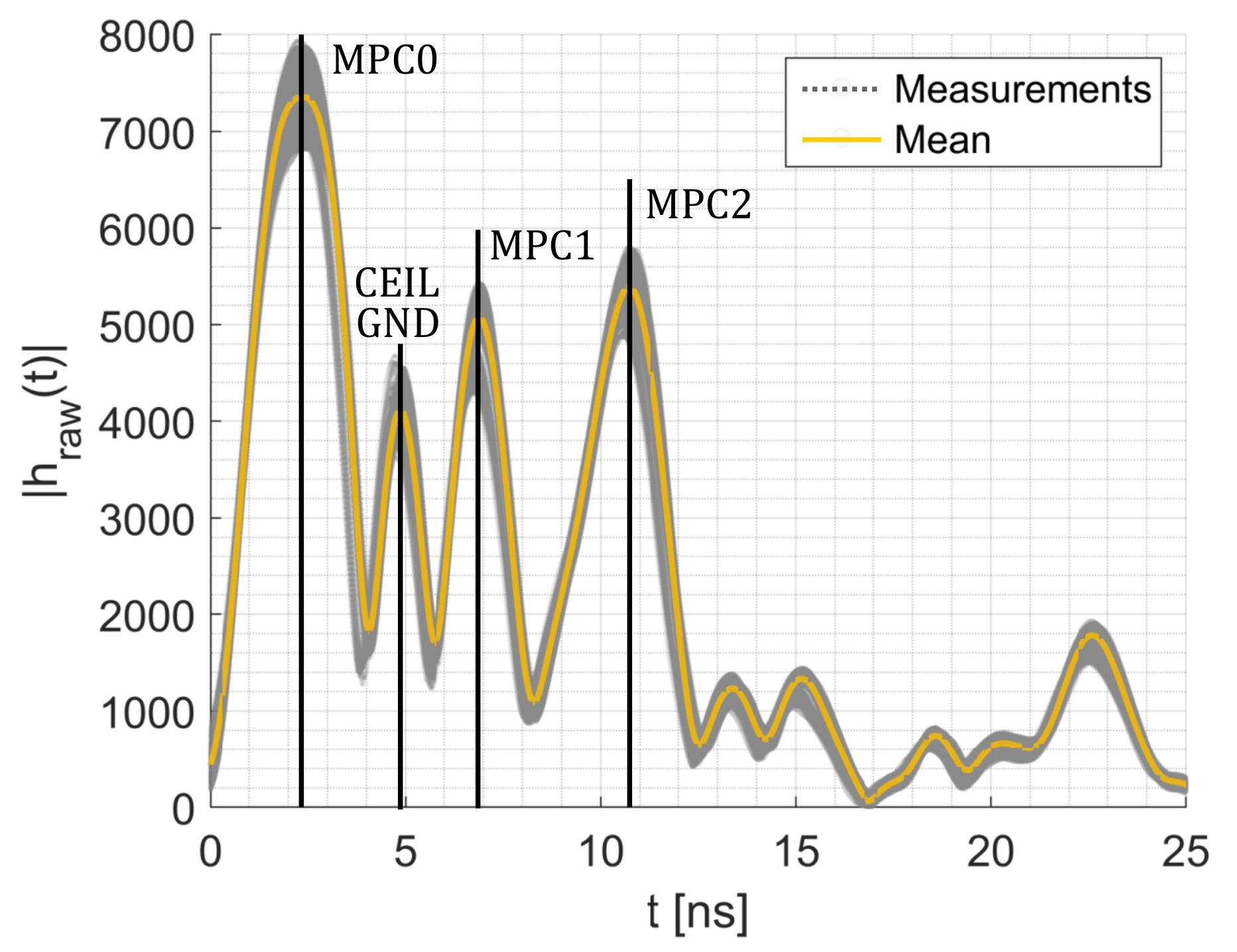
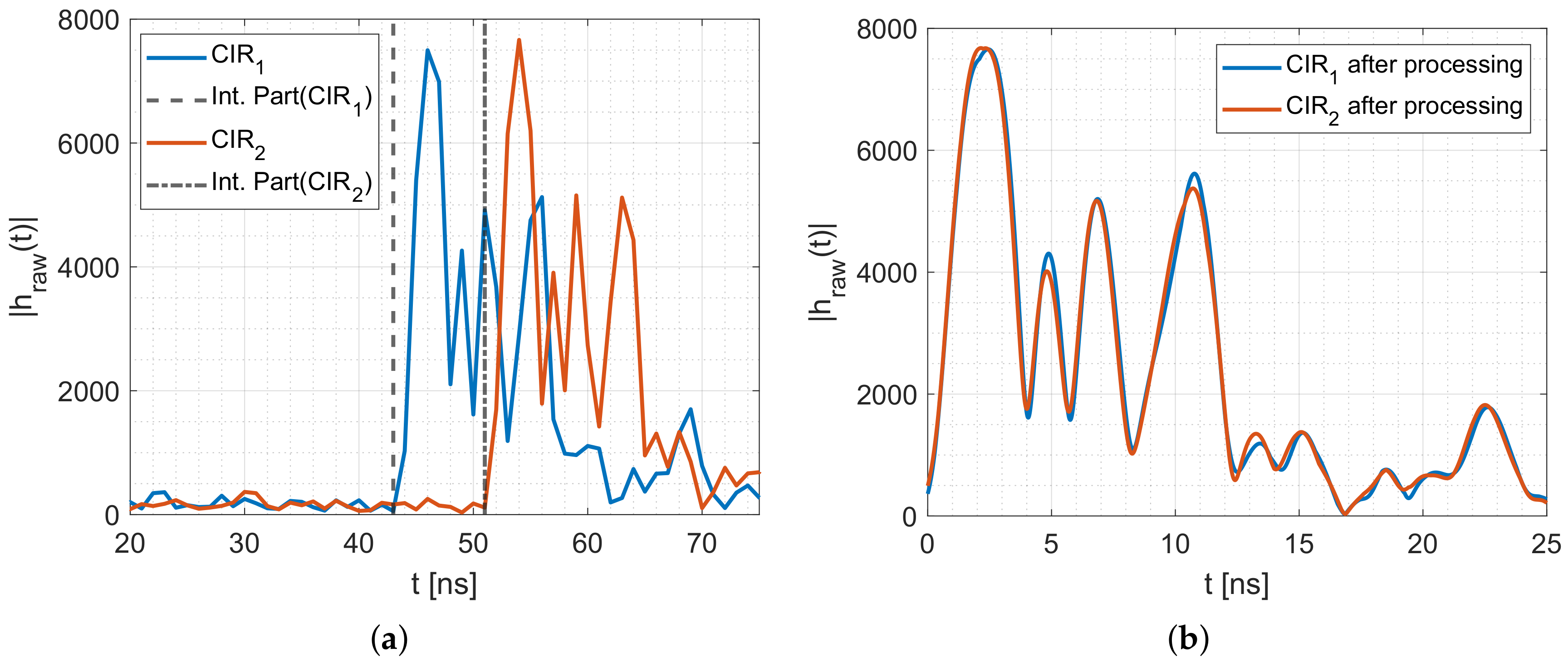
4.2.3. Extraction and Processing of the CIR Measurements
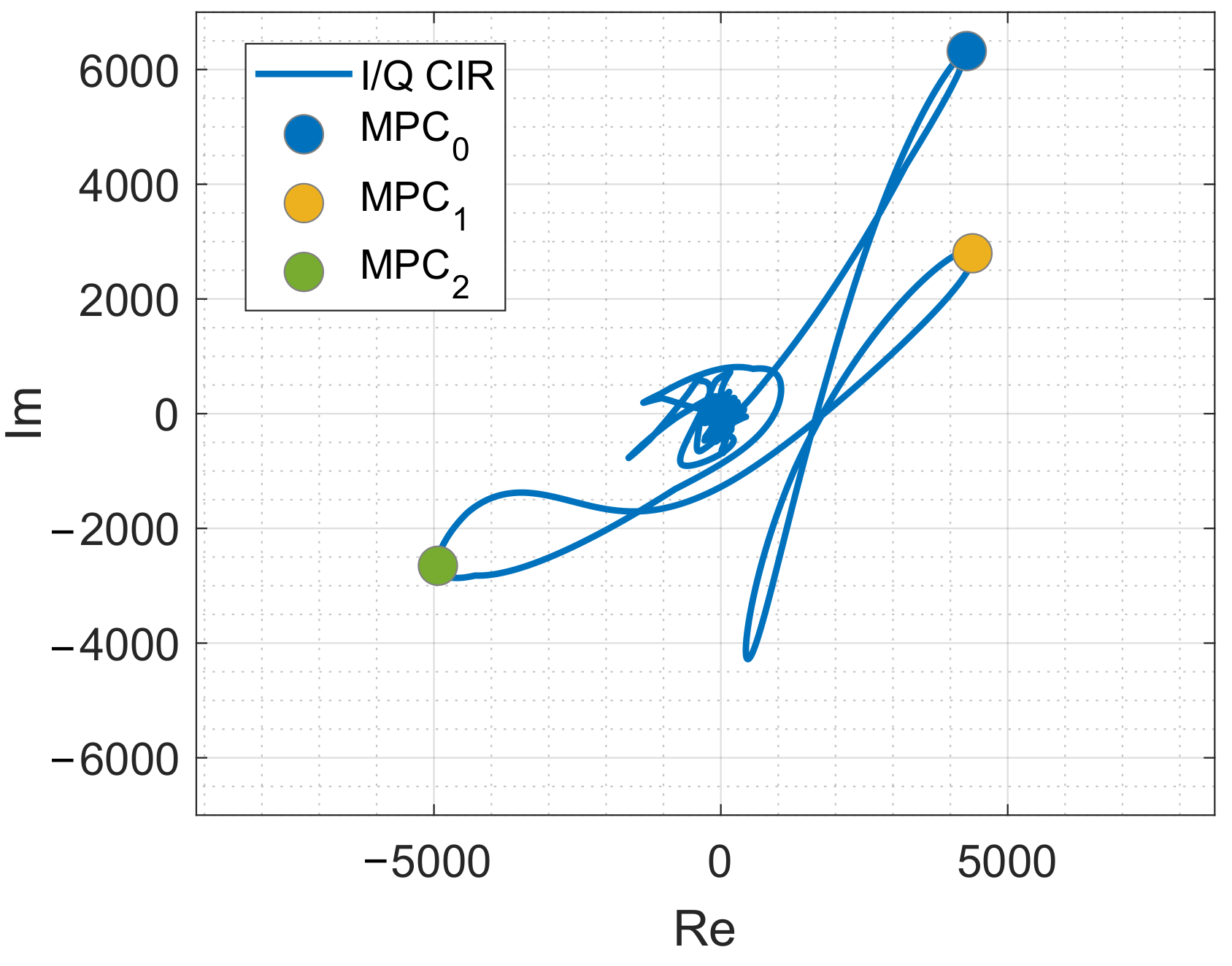
4.2.4. Processing of the Phase
5. Evaluation
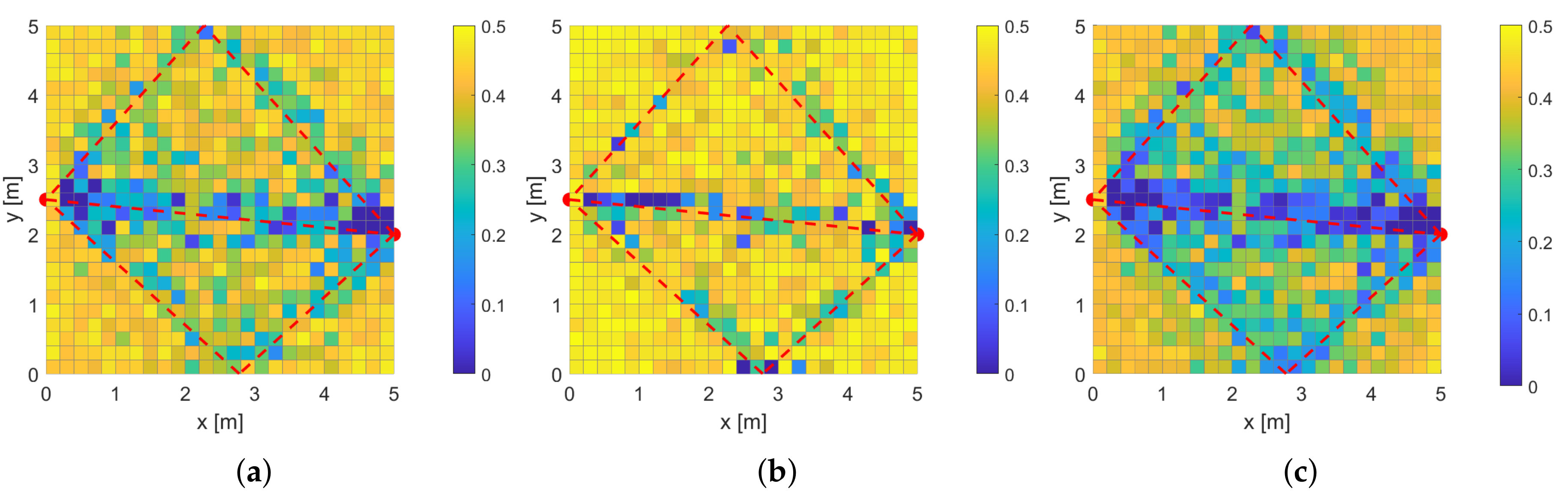
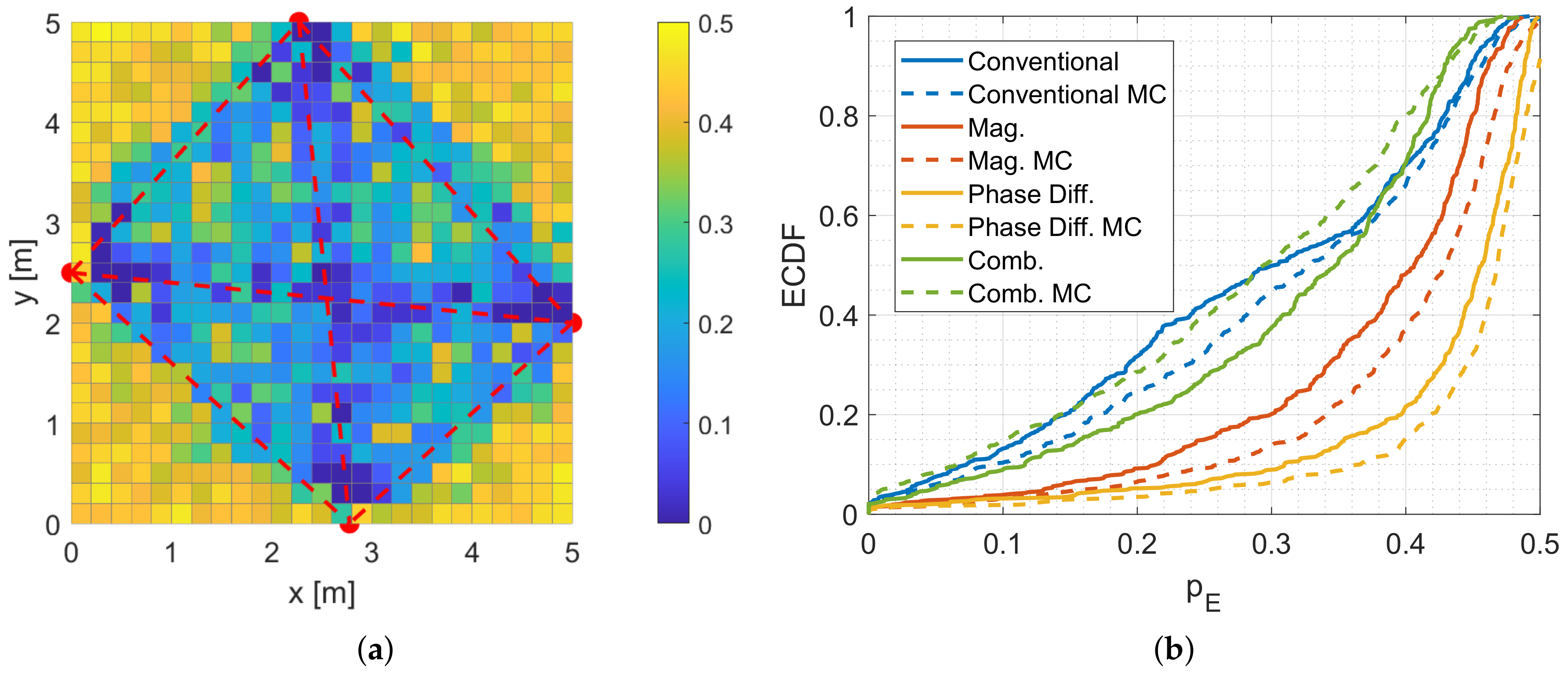
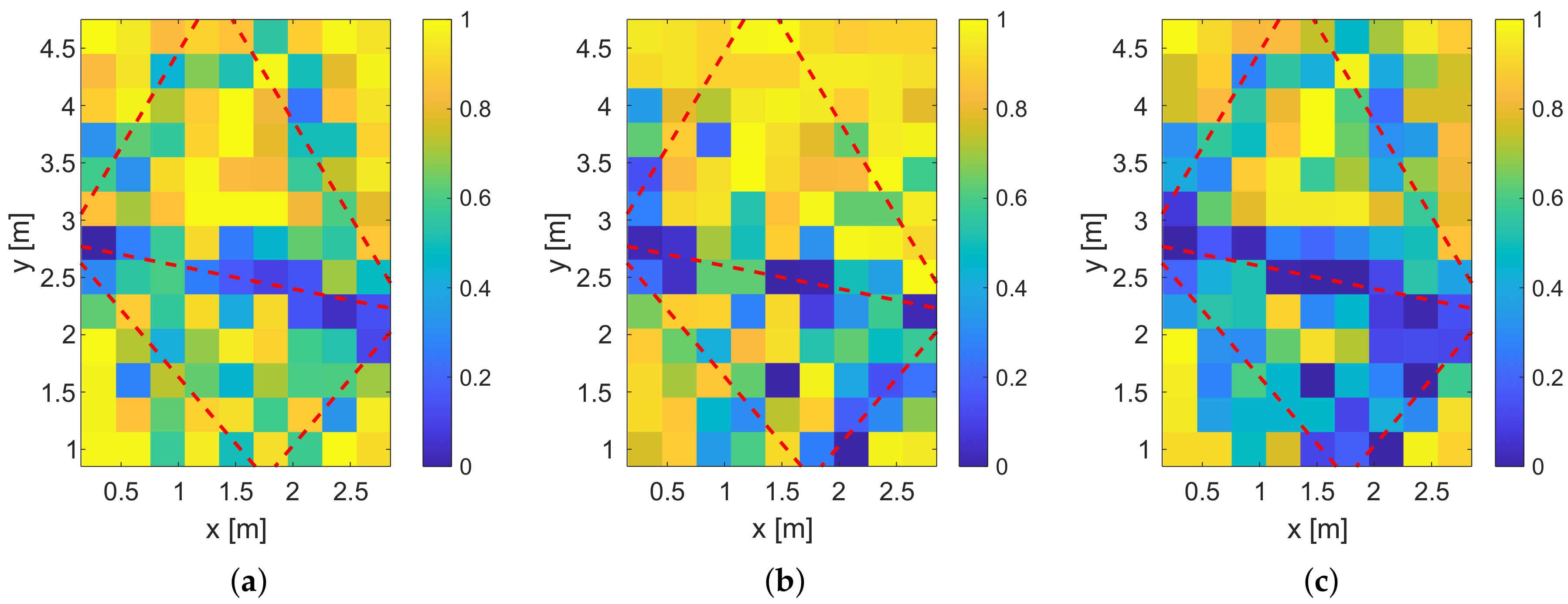
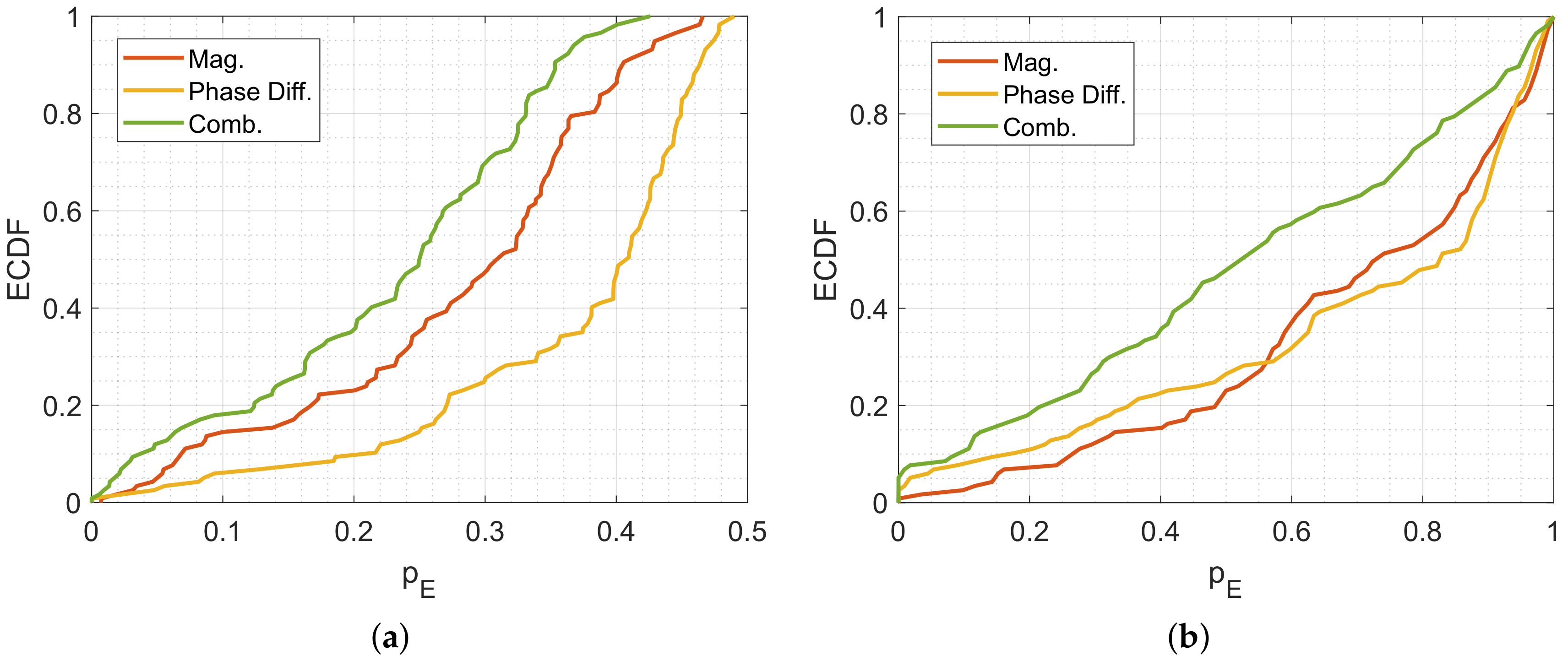
5.1. Simulation of the Position Error Probability
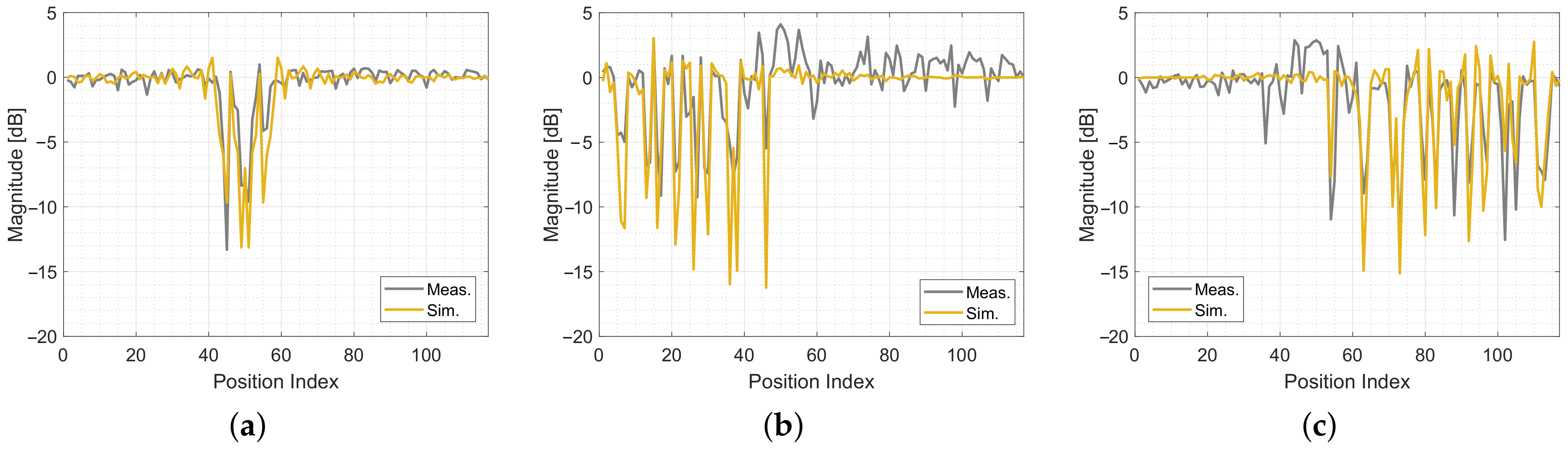
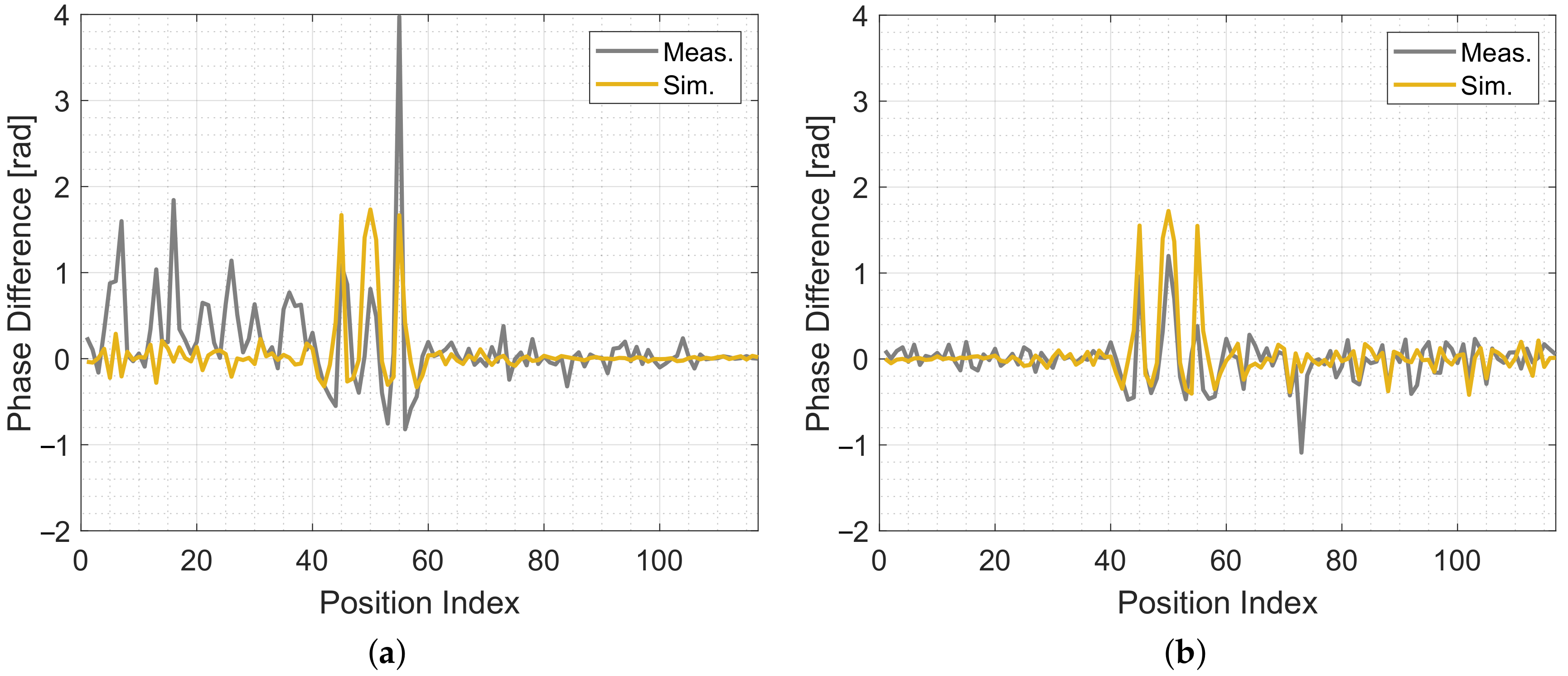
5.2. Comparison of the Model with the Reference Measurements
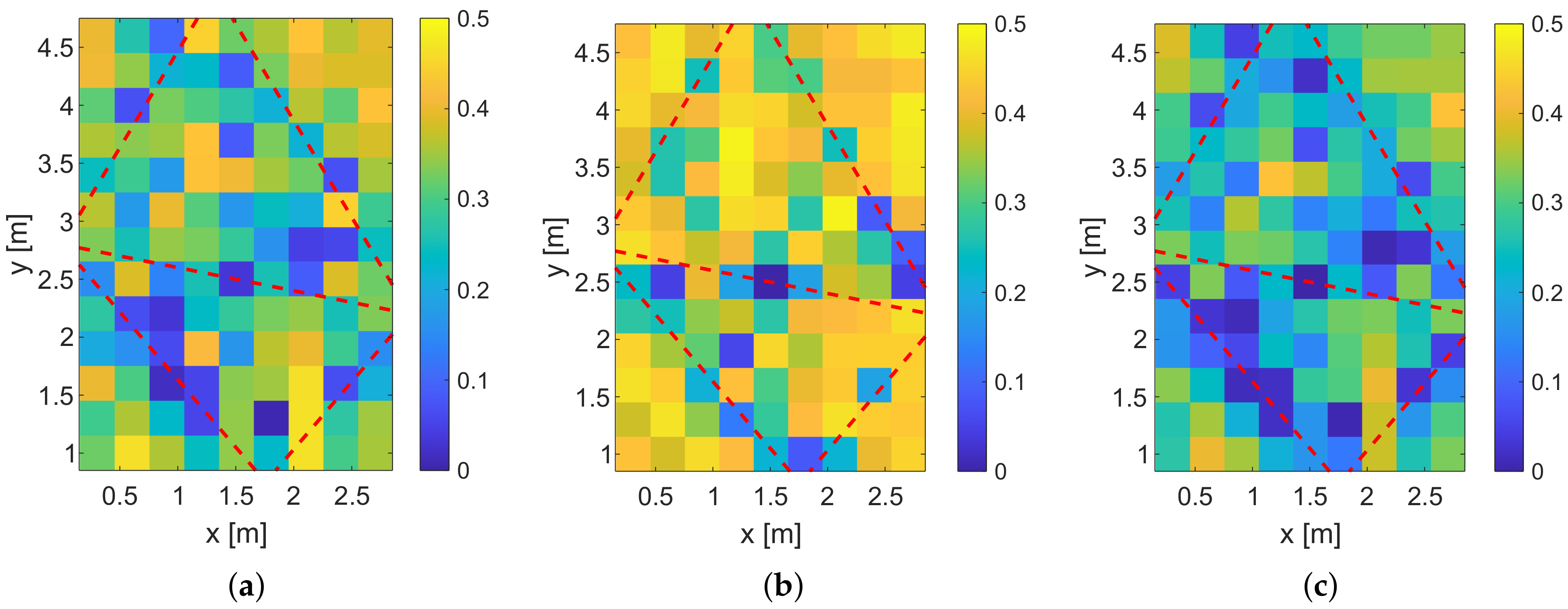
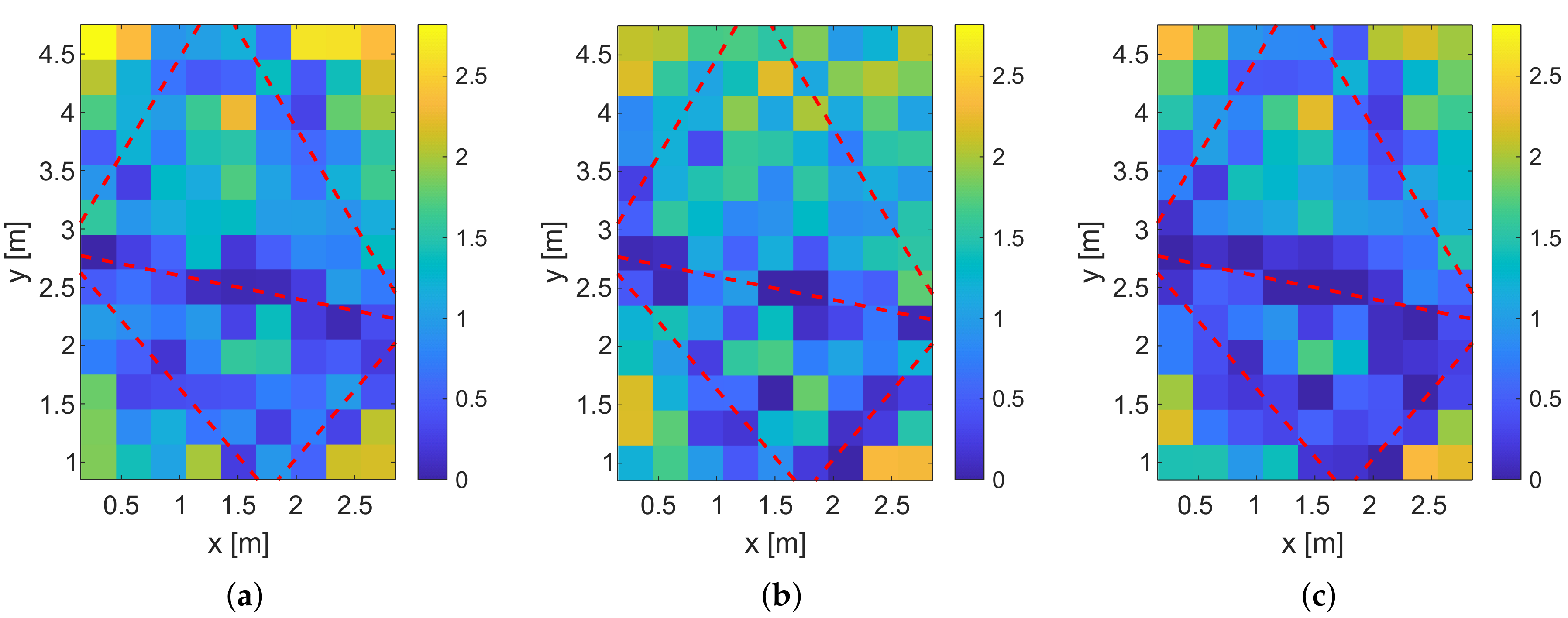
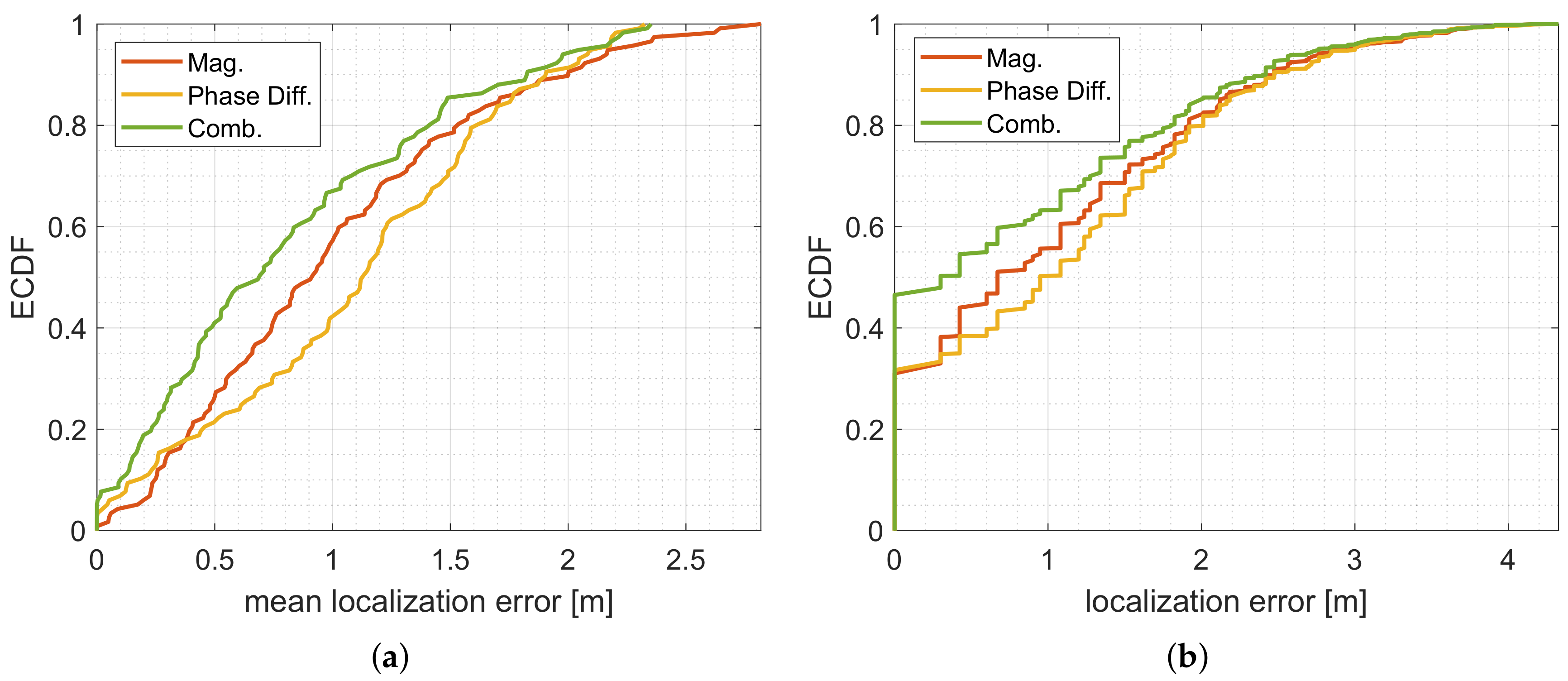
5.3. Evaluation of the Measurement Setup
6. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CSI | channel state information |
| CIR | channel impulse response |
| DFL | device-free localization |
| ECDF | empirical cumulative distribution function |
| MAMPI | multipath-assisted device-free localization with magnitude and phase information |
| MC | Monte-Carlo |
| MPC | multipath component |
| probability density function | |
| PRF | pulse repetition frequency |
| RF | radio frequency |
| RSS | received signal strength |
| UWB | ultra-wideband |
References
- Kaltiokallio, O.; Bocca, M.; Patwari, N. Follow@ grandma: Long-term device-free localization for residential monitoring. In Proceedings of the 37th Annual IEEE Conference on Local Computer Networks-Workshops, Clearwater, FL, USA, 22–25 October 2012; pp. 991–998. [Google Scholar]
- Denis, S.; Bellekens, B.; Kaya, A.; Berkvens, R.; Weyn, M. Large-Scale Crowd Analysis through the Use of Passive Radio Sensing Networks. Sensors 2020, 20, 2624. [Google Scholar] [CrossRef] [PubMed]
- Denis, S.; Berkvens, R.; Weyn, M. A Survey on Detection, Tracking and Identification in Radio Frequency-Based Device-Free Localization. Sensors 2019, 19, 5329. [Google Scholar] [CrossRef] [PubMed]
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-free passive localization for wireless environments. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, Montréal, QC, Canada, 9–14 September 2007; pp. 222–229. [Google Scholar]
- Cimdins, M.; Schmidt, S.O.; Hellbrück, H. MAMPI–Multipath-assisted Device-free Localization with Magnitude and Phase Information. In Proceedings of the 2020 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 2–4 June 2020; pp. 1–6. [Google Scholar]
- Cimdins, M.; Schmidt, S.O.; Hellbrück, H. Modeling the Magnitude and Phase of Multipath UWB Signals for the Use in Passive Localization. In Proceedings of the 16th Workshop on Positioning, Navigation and Communication, Bremen, Germany, 23–24 October 2019. [Google Scholar]
- Witrisal, K.; Meissner, P.; Leitinger, E.; Shen, Y.; Gustafson, C.; Tufvesson, F.; Haneda, K.; Dardari, D.; Molisch, A.F.; Conti, A.; et al. High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend. IEEE Signal Process. Mag. 2016, 33, 59–70. [Google Scholar] [CrossRef]
- Großwindhager, B.; Rath, M.; Kulmer, J.; Bakr, M.S.; Boano, C.A.; Witrisal, K.; Römer, K. SALMA: UWB-based Single-Anchor Localization System using Multipath Assistance. In Proceedings of the 16th ACM Conference on Embedded Networked Sensor Systems, Shenzhen, China, 4–7 November 2018; pp. 132–144. [Google Scholar]
- Schmidt, S.O.; Cimdins, M.; Hellbrück, H. On the Effective Length of Channel Impulse Responses in UWB Single Anchor Localization. In Proceedings of the International Conference on Localization and GNSS, Nuremberg, Germany, 4–6 June 2019. [Google Scholar]
- Kilic, Y.; Wymeersch, H.; Meijerink, A.; Bentum, M.J.; Scanlon, W.G. Device-Free Person Detection and Ranging in UWB Networks. IEEE J. Sel. Top. Signal Process. 2014, 8, 43–54. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, H.; Xu, S.; Gao, F.; Bu, X.; An, J. Towards robust and efficient device-free localization using UWB sensor network. Pervasive Mob. Comput. 2017, 41, 451–469. [Google Scholar] [CrossRef]
- Bregar, K.; Hrovat, A.; Mohorčič, M.; Javornik, T. Self-Calibrated UWB based device-free indoor localization and activity detection approach. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020; pp. 176–181. [Google Scholar]
- Schmidhammer, M.; Gentner, C.; de Ponte Müller, F. A Novel Approach for Localizing Non-Equipped Road Users. In INFORMATIK 2019: 50 Jahre Gesellschaft für Informatik–Informatik für Gesellschaft (Workshop-Beiträge); Gesellschaft für Informatik e.V.: Bonn, Germany, 2019. [Google Scholar]
- Schmidhammer, M.; Genter, C.G.; Siebler, B. Localization of Discrete Mobile Scatterers in Vehicular Environments Using Delay Estimates. In Proceedings of the 2019 International Conference on Location and GNSS (ICL-GNSS), Nürnberg, Deutschland, 4–6 June 2019. [Google Scholar]
- Ledergerber, A.; D’Andrea, R. A Multi-Static Radar Network with Ultra-Wideband Radio-Equipped Devices. Sensors 2020, 20, 1599. [Google Scholar] [CrossRef] [PubMed]
- Unterhuber, P.; Schmidhammer, M.; Sand, S. Wi-Fi Sensing Application: Multipath Enhanced Device Free Localization. In Proceedings of the IEEE 802.11 Wireless Interim Meeting, Hanoi, Vietnam, 15–20 September 2019. [Google Scholar]
- Gunia, M.; Lu, Y.; Joram, N.; Ellinger, F. On the Precision of Common Individual or Hybrid Positioning Systems. In Proceedings of the 2019 9th International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–6. [Google Scholar]
- Cimdins, M.; Hellbrück, H. Modeling Received Signal Strength and Multipath Propagation Effects of Moving Persons. In Proceedings of the 2017 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Schmidhammer, M.; Walter, M.; Gentner, C.; Sand, S. Physical Modeling for Device-Free Localization exploiting Multipath Propagation of Mobile Radio Signals. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar]
- Rampa, V.; Savazzi, S.; Nicoli, M.; D’Amico, M. Physical modeling and performance bounds for device-free localization systems. IEEE Signal Process. Lett. 2015, 22, 1864–1868. [Google Scholar] [CrossRef]
- Balman, K.; Jordan, E. Electromagnetic Waves and Radiating Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 1968. [Google Scholar]
- Cimdins, M.; Pelka, M.; Hellbrück, H. Sundew: Design and Evaluation of a Model-Based Device-Free Localization System. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Retscher, G.; Joksch, J. Comparison of different vector distance measure calculation variants for indoor location fingerprinting. In Proceedings of the 13th International Conference on Location-Based Services ICA , Vienna, Austria, 14–16 November 2016; pp. 53–76. [Google Scholar]
- Decawave Ltd. DW1000 Datasheet; Version 2.09; Decawave Ltd.: Dublin, Ireland, 2015. [Google Scholar]
- Pelka, M.; Amann, D.; Cimdins, M.; Hellbrück, H. Evaluation of time-based ranging methods: Does the choice matter? In Proceedings of the 2017 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Pelka, M.; Goronzy, G.; Hellbrück, H. Iterative approach for anchor configuration of positioning systems. ICT Express 2016, 2, 1–4. [Google Scholar] [CrossRef][Green Version]
- Moschevikin, A.; Tsvetkov, E.; Alekseev, A.; Sikora, A. Investigations on passive channel impulse response of ultra wide band signals for monitoring and safety applications. In Proceedings of the 2016 3rd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Offenburg, Germany, 26–27 September 2016; pp. 97–104. [Google Scholar]
- Decawave Ltd. DW1000 User Manual; Version 2.11; Dacawave Ltd.: Dublin, Ireland, 2017. [Google Scholar]
- Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow: Concepts, Tools, and Techniques to Build Intelligent Systems; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2019. [Google Scholar]
- Chang, L.; Xiong, J.; Wang, Y.; Chen, X.; Hu, J.; Fang, D. iUpdater: Low cost RSS fingerprints updating for device-free localization. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 900–910. [Google Scholar]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cimdins, M.; Schmidt, S.O.; Hellbrück, H. MAMPI-UWB—Multipath-Assisted Device-Free Localization with Magnitude and Phase Information with UWB Transceivers. Sensors 2020, 20, 7090. https://doi.org/10.3390/s20247090
Cimdins M, Schmidt SO, Hellbrück H. MAMPI-UWB—Multipath-Assisted Device-Free Localization with Magnitude and Phase Information with UWB Transceivers. Sensors. 2020; 20(24):7090. https://doi.org/10.3390/s20247090
Chicago/Turabian StyleCimdins, Marco, Sven Ole Schmidt, and Horst Hellbrück. 2020. "MAMPI-UWB—Multipath-Assisted Device-Free Localization with Magnitude and Phase Information with UWB Transceivers" Sensors 20, no. 24: 7090. https://doi.org/10.3390/s20247090
APA StyleCimdins, M., Schmidt, S. O., & Hellbrück, H. (2020). MAMPI-UWB—Multipath-Assisted Device-Free Localization with Magnitude and Phase Information with UWB Transceivers. Sensors, 20(24), 7090. https://doi.org/10.3390/s20247090