Safety Evaluation and Experimental Study of a New Bionic Muscle Cable-Driven Lower Limb Rehabilitation Robot




Abstract
1. Introduction
2. Methodology
2.1. BM-CDLR
2.2. Mechanical Analysis
2.3. Safety Evaluation of the BM-CDLR
2.3.1. Structural Safety
2.3.2. Use Safety
3. Results and Discussion
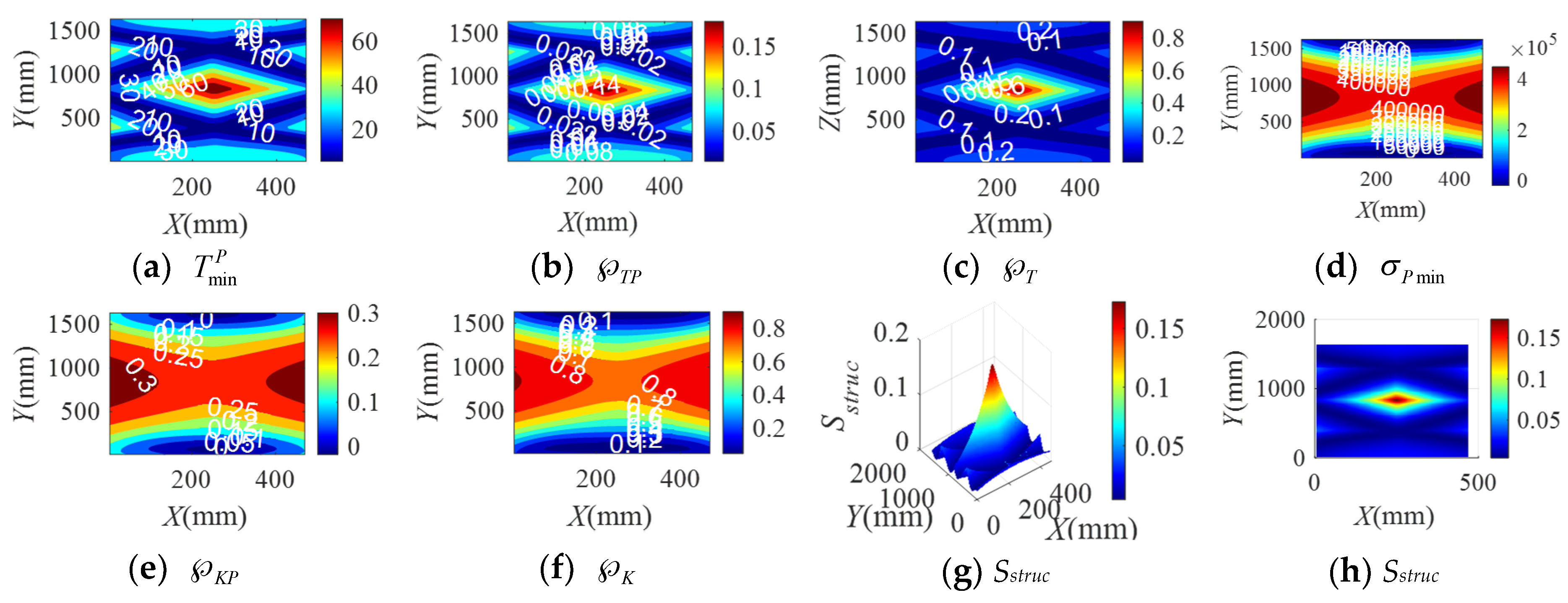
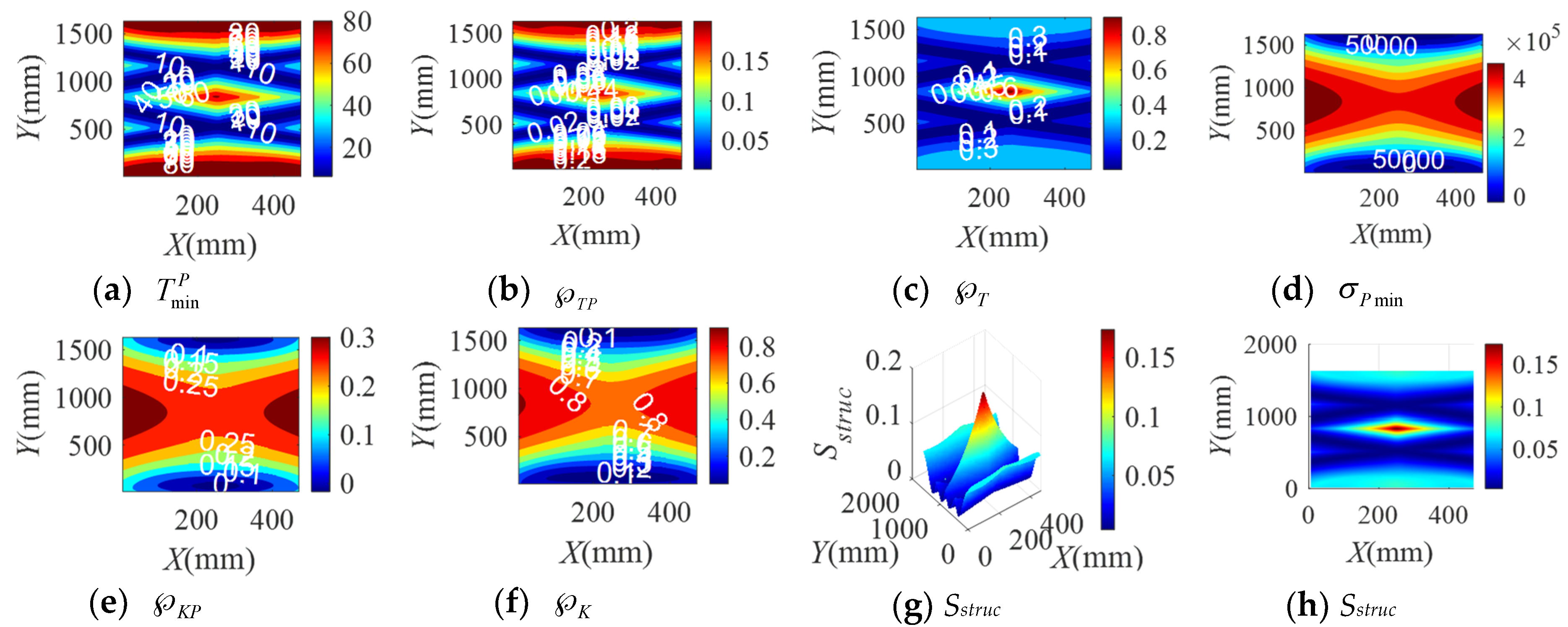
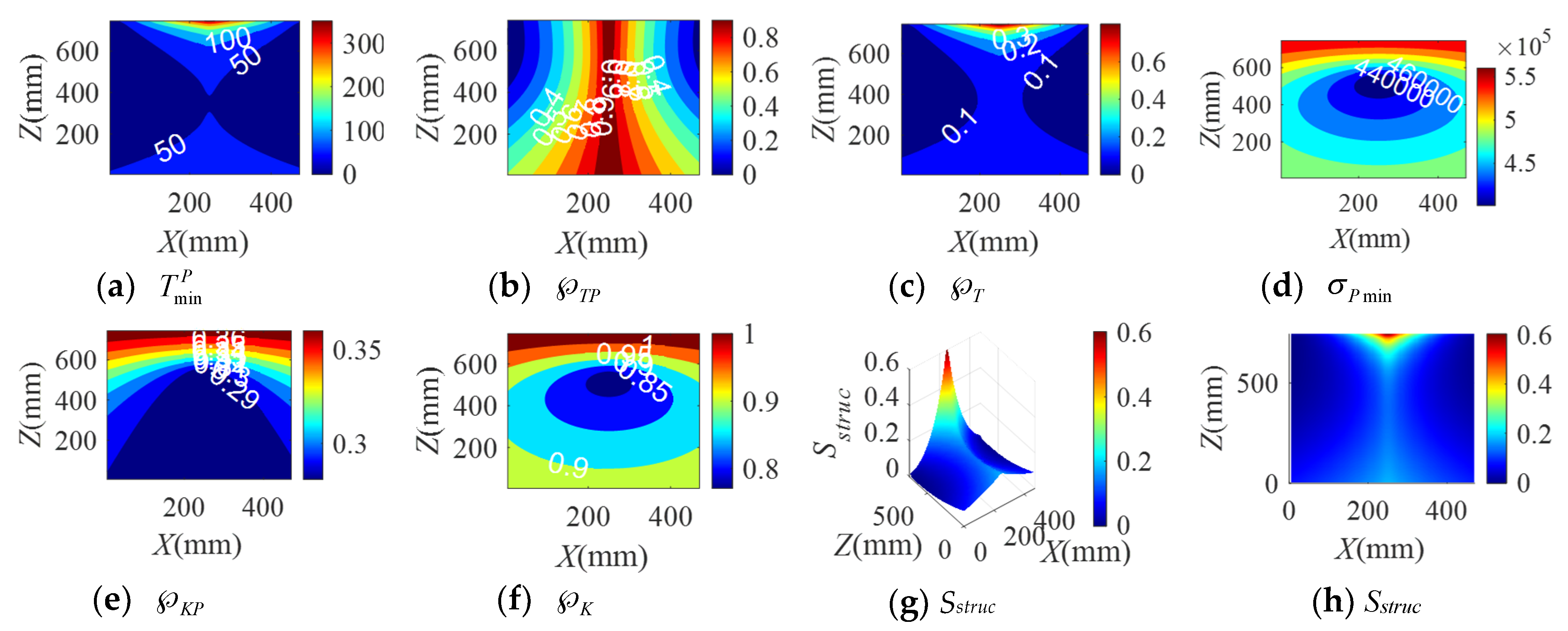
3.1. Distribution Analysis of the Structural Safety of the BM-CDLR
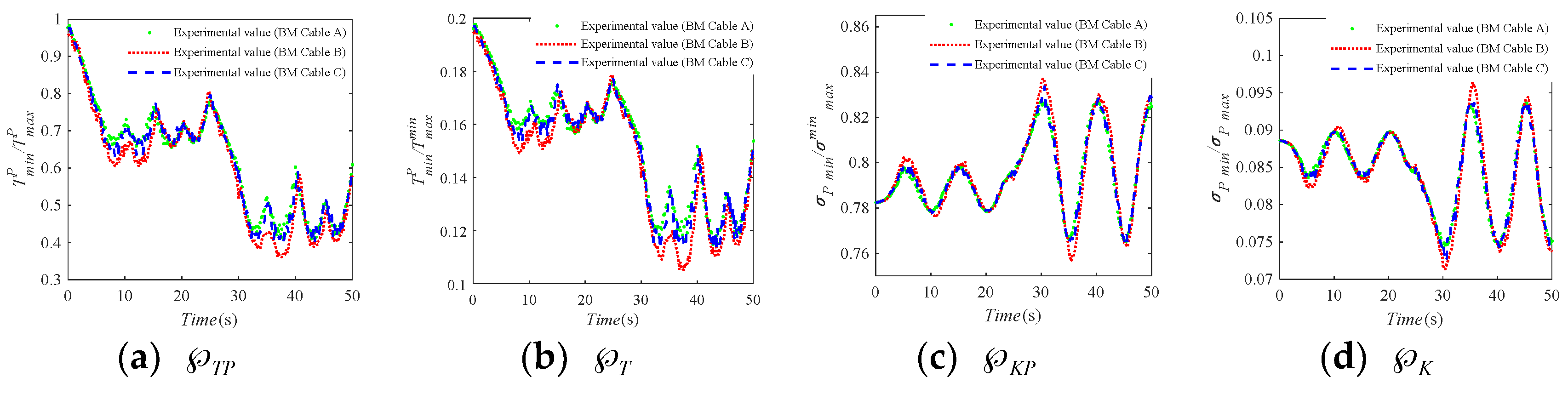
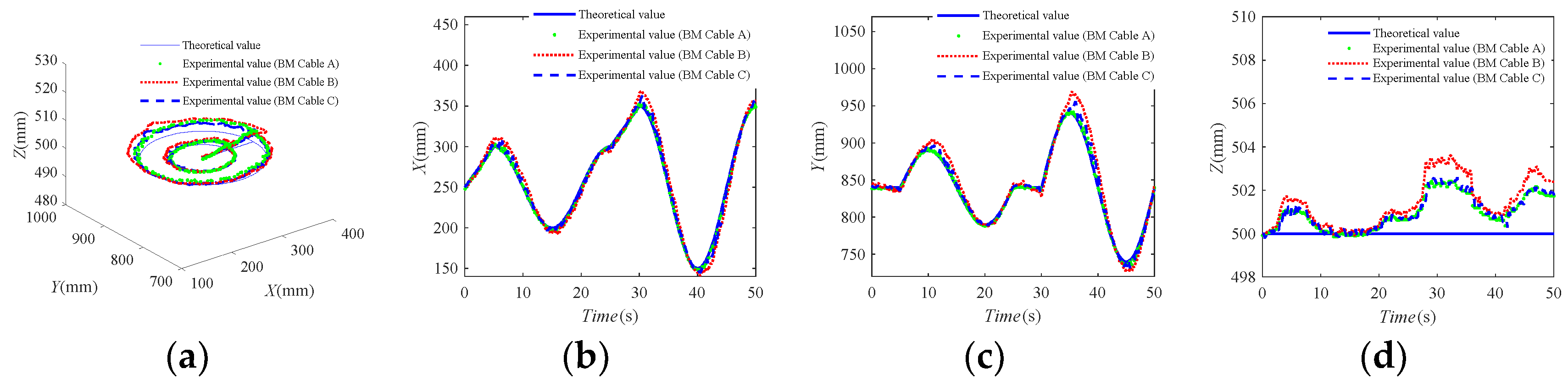
3.2. Experimental Study of the Use Safety of the BM-CDLR
4. Conclusions
- (1)
- The introduction of the BM cable can solve the pseudo-drag problem of the CDPR.
- (2)
- The safety of the BM-CDLR is better in the middle and upper areas of the workspace than that of the boundary area. The smaller movement speed of the lower limb is helpful to improve the safety of the BM-CDLR. However, in order to enhance the training effect of the BM-CDLR, it is necessary to determine a feasible movement speed of the lower limbs in actual training according to the patient’s movement ability and professional evaluation given by the rehabilitation physiotherapist.
- (3)
- The stiffness coefficient and the free length of the elastic elements in the BM cable have a greater impact on the motion performance and safety of the BM-CDLR system. Therefore, it is necessary to choose the stiffness coefficient and the free length of the elastic elements in the BM cable according to the planned training task, the safety performance factors, and the safety evaluation index in practical applications.
Author Contributions
Funding
Conflicts of Interest
References
- Bacci, M.L. A Concise History of World Population; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]
- Kanasi, E.; Ayilavarapu, S.; Jones, J. The aging population: Demographics and the biology of aging. Periodontology 2000 2016, 72, 13–18. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, K.Y.; Zhao, W.Y.; Wang, W.L.; Han, Z.; Zhang, Z.X. Effects of single crouch walking gaits on fatigue damages of lower extremity main muscles. J. Mech. Med. Biol. 2019, 19, 1940046. [Google Scholar] [CrossRef]
- De-La-torre, R.; Oña, E.D.; Balaguer, C.; Jardón, A. Robot-aided systems for improving the assessment of upper limb spasticity: A systematic review. Sensors 2020, 20, 5251. [Google Scholar] [CrossRef]
- Sanjuan, J.D.; Castillo, A.D.; Padilla, M.A.; Quintero, M.C.; Gutierrez, E.E.; Sampayo, I.P.; Hernandez, J.R.; Rahman, M.H. Cable driven exoskeleton for upper-limb rehabilitation: A design review. Robot. Auton. Syst. 2020, 126, 103445. [Google Scholar] [CrossRef]
- Basteris, A.; Nijenhuis, S.M.; Stienen, A.H.A. Training modalities in robot-mediated upper limb rehabilitation in stroke: A framework for classication based on a systematic review. J. NeuroEng. Rehabil. 2014, 11, 111–126. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.H.; Lien, W.M.; Wang, W.W.; Lee, G.D.; Hsu, L.C.; Lee, K.W.; Lin, S.Y.; Lin, C.H.; Fu, L.C.; Lai, J.S.; et al. Assistive control system for upper limb rehabilitation robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1199–1209. [Google Scholar] [CrossRef] [PubMed]
- Ugurlu, B.; Nishimura, M.; Hyodo, K.; Kawanishi, M.; Narikiyo, T. Proof of concept for robot-aided upper limb rehabilitation using disturbance observers. IEEE Trans. Hum. Mach. Syst. 2015, 45, 110–118. [Google Scholar] [CrossRef]
- Jin, X.; Prado, A.; Agrawal, S.K. Retraining of Human Gait—Are Lightweight Cable-Driven Leg Exoskeleton Designs Effective? IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 847–855. [Google Scholar] [CrossRef] [PubMed]
- Kino, H.; Yoshitake, T.; Wada, R.; Tahara, K.; Tsuda, K. 3-DOF planar parallel-wire driven robot with an active balancer and its model-based adaptive control. Adv. Robot. 2018, 32, 766–777. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, K.Y.; Wang, W.L.; Yin, P.C.; Han, Z. Appraise and analysis of dynamical stability of cable-driven lower limb rehabilitation training robot. J. Mech. Sci. Tech. 2019, 33, 5461–5472. [Google Scholar] [CrossRef]
- Qian, S.; Zi, B.; Shang, W.-W.; Xu, Q.S. A review on cable-driven parallel robots. Chin. J. Mech. Eng. 2018, 31, 66–77. [Google Scholar] [CrossRef]
- Zou, Y.P.; Wang, N.; Wang, X.Q.; Ma, H.Z.; Liu, K. Design and Experimental Research of Movable Cable-Driven Lower Limb Rehabilitation Robot. IEEE Access 2019, 7, 2315–2326. [Google Scholar] [CrossRef]
- Zou, Y.P.; Liu, K.; Wang, N.; Li, J.Q.; Geng, X.H.; Chang, K.T. Design and Optimization of Movable Cable-Driven Lower-Limb Rehabilitation Robot. In Proceedings of the 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 714–719. [Google Scholar]
- Wang, Y.L.; Wang, K.Y.; Zhang, Z.; Han, Z.; Wang, W.L. Analysis of dynamical stability of rigid-flexible hybrid-driven lower limb rehabilitation robot. J. Mech. Sci. Tech. 2020, 34, 1735–1748. [Google Scholar] [CrossRef]
- Wang, K.-Y.; Yin, P.-C.; Yang, H.-P.; Tang, X.-Q. The man-machine motion planning of rigid-flexible hybrid lower limb rehabilitation robot. Adv. Mech. Eng. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Barbosa, A.M.; Carvalho, J.C.M.; Goncalves, R.S. Cable-driven lower limb rehabilitation robot. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 244–254. [Google Scholar] [CrossRef]
- Zhao, T.; Zi, B.; Qian, S.; Zhao, J.H. Algebraic Method-Based Point-to-Point Trajectory Planning of an Under-Constrained Cable-Suspended Parallel Robot with Variable Angle and Height Cable Mast. Chin. J. Mech. Eng. 2020, 33, 54. [Google Scholar] [CrossRef]
- Scalera, L.; Gallina, P.; Seriani, S.; Gasparetto, A. Cable-Based Robotic Crane (CBRC): Design and Implementation of Overhead Traveling Cranes Based on Variable Radius Drums. IEEE Trans. Robot. 2018, 34, 474–485. [Google Scholar] [CrossRef]
- Seriani, S.; Gallina, P. Variable radius drum mechanisms. J. Mech. Robot. 2016, 8, 021016. [Google Scholar] [CrossRef]
- Tang, X. An overview of the development for cable-driven parallel manipulator. Adv. Mech. Eng. 2014, 6, 823–828. [Google Scholar] [CrossRef]
- Hong, H.J.; Ali, J.; Ren, L. A review on topological architecture and design methods of cable-driven mechanism. Adv. Mech. Eng. 2018, 10, 1–14. [Google Scholar] [CrossRef]
- Iandolo, R.; Marini, F.; Semprini, M.; Laffranchi, M.; Mugnosso, M.; Cherif, A.; De Michieli, L.; Chiappalone, M.; Zenzeri, J. Perspectives and challenges in robotic neurorehabilitation. Appl. Sci. 2019, 9, 3183. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, K.Y.; Zhang, Z.X.; Han, Z.; Zhang, Z.X. Appraisement and Analysis of Dynamical Stability of Under-Constrained Cable-Driven Lower-Limb Rehabilitation Training Robot. Robotica 2020, 1–14. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, K.Y.; Zhang, Z.X. Design, comprehensive evaluation, and experimental study of a cable-driven parallel robot for lower limb rehabilitation. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 371. [Google Scholar] [CrossRef]
- Qian, S.; Bao, K.L.; Zi, B.; Zhu, W.D. Dynamic Trajectory Planning for a Three Degrees-of-Freedom Cable-Driven Parallel Robot Using Quintic B-Splines. J. Mech. Des. 2020, 142, 073301. [Google Scholar] [CrossRef]
- Wei, H.L.; Qui, Y.Y.; Sheng, Y. On the cable pseudo-drag problem of cable-driven parallel camera robots at high speeds. Robotica 2019, 37, 1695–1709. [Google Scholar] [CrossRef]
- Wei, H.L.; Qui, Y.Y.; Sheng, Y. Motion stable control for cable-driven parallel camera robots with high speeds. J. Xidian Univ. 2016, 43, 63–69. [Google Scholar]
- Boschetti, G.; Carbone, G.; Passarini, C. Cable failure operation strategy for a rehabilitation cable-driven robot. Robotics 2019, 8, 17. [Google Scholar] [CrossRef]
- Zi, B.; Yin, G.C.; Li, Y.; Zhang, D. Kinematic Performance Analysis of a Hybrid-Driven Waist Rehabilitation Robot. In Proceedings of the 2nd International Conference on Mechatronics and Robotics Engineering (ICMRE), Nice, France, 18–22 February 2016. [Google Scholar]
- Ghobj, S.; Akl, A.; El-Farr, A.; Ayyash, M.; Abu-Khalaf, J. Mechanical Design for a Cable Driven Upper Limb Exoskeleton Prototype Actuated by Pneumatic Rubber Muscles. In Proceedings of the International Conference on Research and Education in Mechatronics (REM), Wolfenbuettel, Germany, 14–15 September 2017. [Google Scholar]
- Zi, B.; Yin, G.; Zhang, D. Design and Optimization of a Hybrid-Driven Waist Rehabilitation Robot. Sensors 2016, 16, 2121. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wang, K.Y.; Zhang, Z.X.; Mo, Z.J. Control strategy and experimental research of a cable-driven lower limb rehabilitation robot. Proc. Inst. Mech. Eng. Part C J. Eng. Mech. Eng. Sci. 2020, 1–14. [Google Scholar] [CrossRef]
- Chen, Q.; Zi, B.; Sun, Z.; Li, Y.; Xu, Q.S. Design and Development of a New Cable-Driven Parallel Robot for Waist Rehabilitation. IEEE-ASME Trans. Mechatron. 2019, 24, 1497–1507. [Google Scholar] [CrossRef]
- Plooij, M.; Keller, U.; Sterke, B.; Komi, S.; Vallery, H.; Von Zitzewitz, J. Design of RYSEN: An Intrinsically Safe and Low-Power Three-Dimensional Overground Body Weight Support. IEEE Robot. Autom. Lett. 2018, 3, 2253–2260. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, Y.Y.; Sheng, Y. Analysis on the static stiffness of wire-driven parallel manipulators. J. Mech. Eng. 2011, 47, 35–43. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group No. | kei (N/m) | Li0 (m) | P0 (mm) | d × D0 (mm × mm) |
|---|---|---|---|---|
| A | 200 | 0.9 | 4.7 | 1.4 × 11 |
| B | 200 | 1.0 | 5.3 | 1.4 × 11 |
| C | 300 | 0.9 | 7.0 | 1.4 × 11 |
| Group No. | Compared with A, Area Change (%) | Maximum Values | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sstruc ≥ 0.02 | Sstruc | ||||||||||
| A | / | / | 78.6132 | 0.9337 | 0.1876 | 5.8092 | 0.9086 | 0.3865 | 0.1706 | ||
| B | reduce 44.8 | reduce 44.8 | 58.8519 | 0.9131 | 0.1140 | 5.8092 | 0.9131 | 0.3865 | 0.1378 | ||
| C | reduce 14.1 | reduce 13.6 | 89.5437 | 0.9180 | 0.2137 | 5.8111 | 0.9085 | 0.3866 | 0.1707 | ||
| CDLR | / | 70.31 | 0.9051 | 0.1651 | 5.8053 | 0.9113 | 0.3826 | 1.504 | |||
| Group No. | Maximum Values | ||||||
|---|---|---|---|---|---|---|---|
| Sstruc | |||||||
| A | 379.3879 | 0.9791 | 0.9055 | 5.6152 | 0.9358 | 0.3866 | 0.6321 |
| B | 359.3879 | 0.9734 | 0.8577 | 5.6152 | 0.9362 | 0.3866 | 0.6012 |
| C | 377.3452 | 0.9856 | 0.9066 | 5.6155 | 0.9359 | 0.3886 | 0.6294 |
| CDLR | 412.65 | 0.94 | 0.821 | 5.6053 | 0.936 | 0.378 | 0.6193 |
| Test | The Motion Errors on the Small Circle with the Radius R1 | The Motion Errors on the Large Circle with the Radius R2 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X-Axis | Y-Axis | Z-Axis | X-Axis | Y-Axis | Z-Axis | |||||||
| Mean | Max | Mean | Max | Mean | Max | Mean | Max | Mean | Max | Mean | Max | |
| A | 1.733 | 6.55 | 0.33 | 5.70 | 0.123 | 1.044 | 2.03 | 11.025 | 1.178 | 11.72 | 1.38 | 2.41 |
| B | 2.088 | 17.37 | 8.62 | 7.52 | 0.29 | 1.72 | 2.35 | 22.48 | 9.13 | 34.02 | 1.97 | 3.59 |
| C | 1.083 | 11.02 | 3.52 | 6.27 | 0.175 | 1.33 | 1.52 | 15.65 | 4.17 | 25.9 | 1.46 | 2.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.L.; Wang, K.Y.; Wang, K.C.; Mo, Z.J. Safety Evaluation and Experimental Study of a New Bionic Muscle Cable-Driven Lower Limb Rehabilitation Robot. Sensors 2020, 20, 7020. https://doi.org/10.3390/s20247020
Wang YL, Wang KY, Wang KC, Mo ZJ. Safety Evaluation and Experimental Study of a New Bionic Muscle Cable-Driven Lower Limb Rehabilitation Robot. Sensors. 2020; 20(24):7020. https://doi.org/10.3390/s20247020
Chicago/Turabian StyleWang, Yan Lin, Ke Yi Wang, Kui Cheng Wang, and Zong Jun Mo. 2020. "Safety Evaluation and Experimental Study of a New Bionic Muscle Cable-Driven Lower Limb Rehabilitation Robot" Sensors 20, no. 24: 7020. https://doi.org/10.3390/s20247020
APA StyleWang, Y. L., Wang, K. Y., Wang, K. C., & Mo, Z. J. (2020). Safety Evaluation and Experimental Study of a New Bionic Muscle Cable-Driven Lower Limb Rehabilitation Robot. Sensors, 20(24), 7020. https://doi.org/10.3390/s20247020