An inertial navigation system’s response to stochastic input, like sensor noise, is of course of stochastic nature and requires respective methods of analysis. A performance analysis and demonstration of a designed navigation system is usually performed using time-consuming Monte Carlo simulations of representative mission scenarios. This work, however, aims at providing an application-independent, more general insight into propagating inertial sensor noise processes. Therefore, we revisit the analytical representation of strapdown navigation’s error dynamics and derive the system’s white noise response and then extend these to the typical sensor noise processes.
2.1. Strapdown Inertial Navigation Error Dynamics
A strapdown inertial navigation algorithm propagates a vehicle’s position, velocity and orientation based on the measured specific forces (accelerations)
and angular rates
of the vehicle’s body with respect to the inertial reference frame. For the sake of vividness and simple interpretation, this analysis is based on a strapdown inertial algorithm in (local leveled) navigation frame mechanization. This has the inherent advantage of separated horizontal and vertical channels. In the selected mechanization, propagating the position in geodetic coordinates (latitude
, longitude
, altitude
h) is described by the following set of coupled differential equations [
6]:
with the north, east and down velocities
and the local meridional and normal Earth radii
and
. Based on the vehicle’s orientation and the measured specific forces, the change of velocity in the local North–East–Down (NED) frame is given as:
where
denotes the rotation matrix from the body fixed
b-frame to the local north-east-down
n-frame,
from the Earth-centered Earth-fixed (ECEF)
e-frame to the
n-frame.
and
are the skew-symmetric matrices of the respective angular rate vectors
and
. Due to the moving reference system, the measured accelerations are corrected for Coriolis and centrifugal forces. The local gravity
is typically from gravity models like Somigliana’s gravity formula [
24] or higher-order models like the EGM2008 [
25], depending on the application. The vehicle’s change of orientation
with respect to the local North–East–Down (NED) frame is described by the following orientation differential equation:
The rotation matrix from the Earth-fixed frame
e to the local leveled
n-frame depends on the vehicle’s geodetic position and is given by:
The corresponding transport rate in the navigation frame is given by:
We are aware that the above strapdown inertial formulation would require modifications for a real-world implementation due to the singularities at the Earth’s poles and a computationally non-optimal orientation representation. However, this choice allows for a comprehensible and representative analysis of the dynamics of strapdown inertial navigation systems.
By splitting the true navigation states from (
3) to (
5) into the estimated (marked by the hat) and error states (marked by the
), a set of differential equations for the dynamics of the error states is derived. Although, in contrast to the simple separation of the position and velocity states, the orientation error states are represented by multiplying a preceding error rotation matrix
:
Applying above definitions to the strapdown Equations (
3)–(
5) and solving for the error states yields the differential equations of the strapdown error dynamics. Linearization of the error state differential equations yields the following set of linear ordinary differential equations:
where the orientation error matrix
is approximated by the skew-symmetric matrix of the vector of orientation error Euler angles
:
These linearized error equations depend on the current trajectory, which is the true position, velocity, orientation and the corresponding ideal inertial measurements. As we are only interested in the system’s basic response, we trade accuracy for simplicity by only looking at the most typical vehicle state and take further assumptions to eliminate the trajectory dependency and reduce complexity:
- (1)
The specific forces are selected to represent a stationary (ground) vehicle or an aircraft at straight and level flight. The only acceleration is the local gravity as measured by the accelerometer’s down-pointing z-axis. The local gravity measurement is approximated by the standard gravity .
- (2)
Vertical states are omitted for this analysis. The instability of the vertical channel is well known for inertial navigation. In consequence, inertial navigation systems are almost always used with additional aiding of the vertical channel, e.g., barometric altitude measurements in aviation. This bypasses the error dynamics of the vertical channel, which motivates neglecting the corresponding states for this analysis.
- (3)
The meridional and normal radii and are approximated by a single Gaussian mean radius . The maximum error arising from this approximation occurs along the equator and is only 0.3% of the true radii.
- (4)
The vehicle’s velocity is neglected. This eliminates any trajectory dependency and creates a more general approximation. Although the transport rate due to the vehicle’s velocity may reach the same order of magnitude as the Earth’s angular rate, the resulting Coriolis forces are usually negligible compared to e.g., the specific forces errors. Jekeli [
6] states a maximum velocity of about 200 m/s up to which the vehicle’s velocity can be neglected for the error propagation without major impairs.
- (5)
The orientation is neglected for the inputs. This is equivalent to choosing inertial measurement inputs in the local navigation frame instead of the body frame. For isotropic and uncorrelated sensor triads, the input covariance is spherical and a transformation via the orientation matrix has no effect anyway on such a sphere.
Incorporating these approximations into the linearized strapdown error dynamics (
11) to (
13) yields the following linear state space system:
Despite the various assumptions, this simplified error model contains all three well-known strapdown error dynamics (Schuler, 24 h and Foucault oscillations) that are also observed in the system’s responses to sensor errors. Using the above state space system and a linear output mapping described by the matrix
:
the transfer function
from sensor errors in
to selected navigation error states
of interest can be determined as [
26]:
Transformation of the transfer function
from the frequency to the time domain yields the impulse response
in the time domain:
Using these equations, the transfer functions and impulse responses of the strapdown inertial error dynamics are determined. In contrast to literature [
1,
3,
4,
6], no further approximations are made. The resulting lengthy expressions are presented in
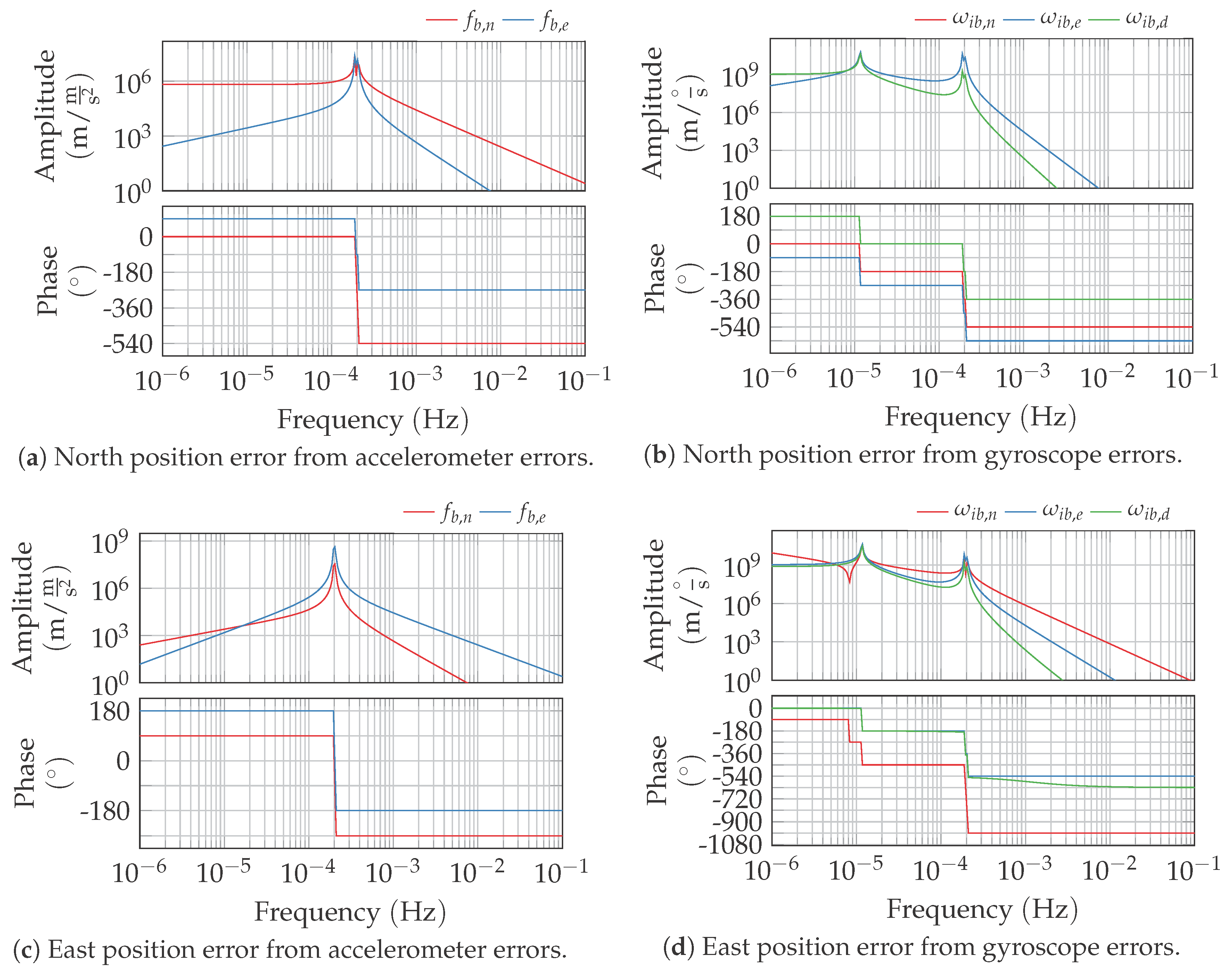
Appendix A. The corresponding Bode plots for gyroscope and accelerometer inputs to the north and east position errors are depicted in
Figure 1. The determined transfer functions display up to three different complex conjugate poles at:
the Earth angular rate
the rates
and
The trigonometric addition theorem allows the interpretation of the two frequencies
and
as a Schuler oscillation:
that is modulated at the Foucault rate
:
In consistency with the literature, the positions errors follow that modulated Schuler oscillation when driven by accelerometer errors. When excited by gyroscopic errors, the additional 24 h oscillation can be observed.
2.2. Propagation of White Noise
Using the determined transfer functions, the strapdown system’s response to deterministic bias-like errors can be easily determined as its step response. For stochastic input, like sensor noise, the output will be stochastic and thus described by its stochastic moments, e.g., mean and variance. First, the propagation of white Gaussian sensor noise input and the navigation system’s output error variance is determined. As (
15) is a (locally) linear time-invariant system, the system’s response
to an input
is determined from the convolution of the system’s impulse response
and the input signal
:
Using above formula, the expected value
of the system’s response to white noise can be determined. For stationary white noise input, the expected value of the system’s output is simply the step response scaled by the input’s expected value:
A zero-mean white Gaussian noise input results in a zero-mean output
. By definition, the auto covariance of white noise is zero for any two different evaluation times
and the variance
if
. Finally, the variance of the output signal
from white Gaussian noise input of variance
is determined to:
Above equation allows the determination of the navigation error’s (e.g., position) variance from white Gaussian noise on the inertial measurements inputs. In the next section, this concept is adapted to incorporate the non-white inertial sensor noise processes.
2.3. Propagation of Colored Sensor Noise Processes
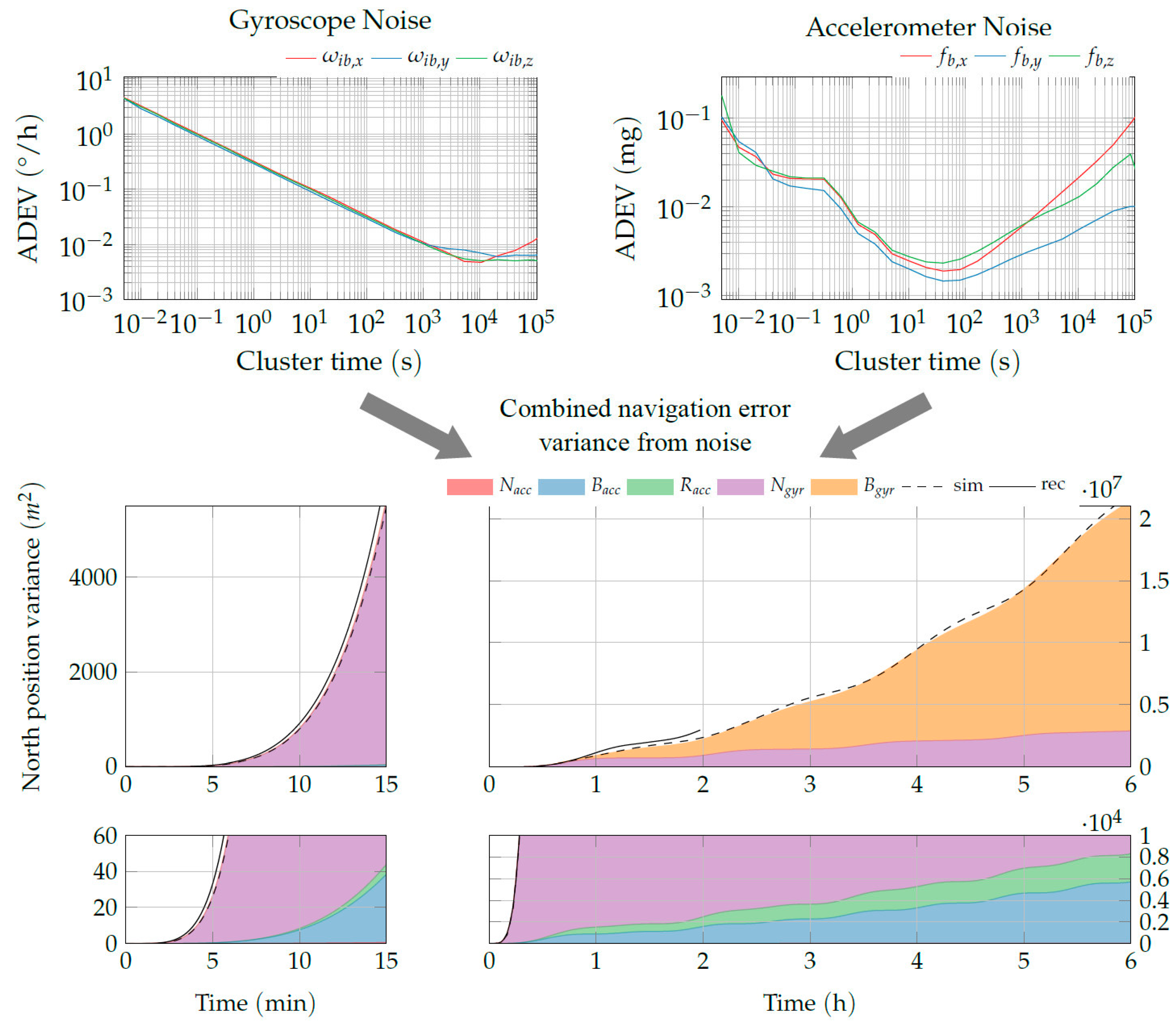
The above-derived propagation of white Gaussian noise is enhanced to incorporate the most typical inertial sensor noise processes. These sensor noise processes are characterized by a specific shape of its power spectral density and a scaling coefficient. These coefficients are usually determined from an Allan variance analysis of the recorded sensor noise as described in [
20]. Different descriptions of inertial sensor noise processes can be found in the literature, e.g., [
11,
27,
28]. In this manuscript, we follow the definitions of the IEEE inertial sensor standards [
18,
19,
20]. The typical noise processes and their defining properties are summarized in
Table A3 in
Appendix C. Although the listed processes are labeled for gyroscope measurements (angles and rates), they also apply to accelerometers: gyroscope
angular random walk corresponds to accelerometer
velocity random walk and analogously rate noise corresponds to acceleration noise.
For a (wide-sense) stationary stochastic process, the Wiener–Khinchin theorem states that the PSD of an output signal is the squared magnitude of the system’s transfer function
times the input’s PSD [
29]:
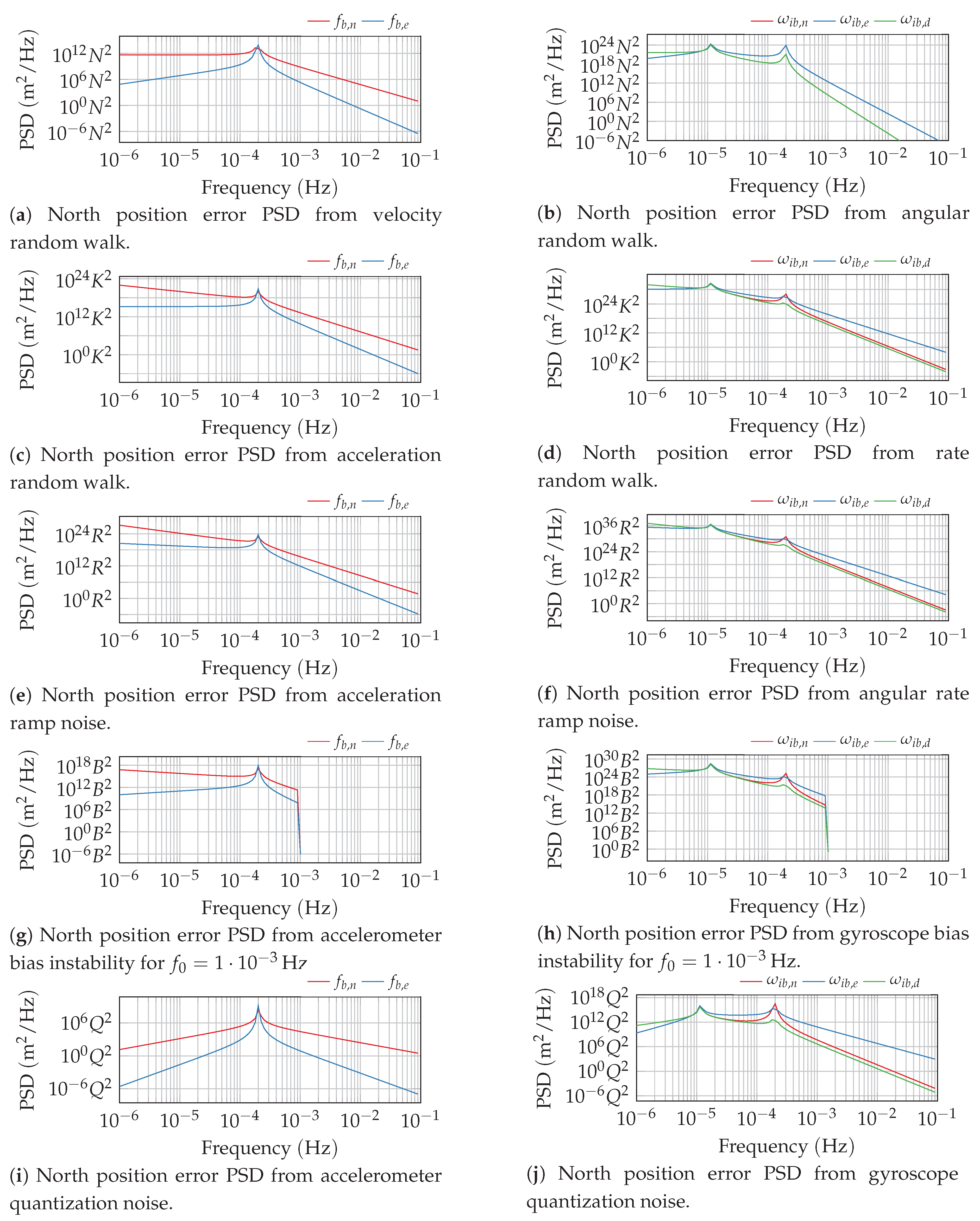
Using the defining PSD of the different noise processes and the strapdown error dynamic’s transfer function
, the resulting PSD of the navigator’s output error can thus be easily determined. The resulting PSD of the north position error is exemplarily depicted in
Figure 2 for the different noise processes of
Table A3. The strapdown error dynamics itself has a low-pass-like behavior. All non-white noise processes, except the quantization noise, excite the system dominantly in the low-frequency spectrum, which is propagated through the strapdown error dynamics. Although the quantization noise is dominated by the higher frequencies, the low-pass behavior of the strapdown dynamics still attenuates this excitation effectively.
The Wiener–Khinchin theorem (
24) provides an option for creating colored noise from white noise input. As illustrated in
Figure 3, a suitable filter with transfer function
can be used to create noise with the PSD of the desired noise process. Combining this transfer function with the strapdown error dynamics transfer function yields a total system that describes the navigator’s response to this particular noise process; however, it is not always possible to find such a simple filter, which requires another approach for modeling the bias instability and rate ramp noise.
2.3.1. Angular Random Walk
As defined in
Table A3, the angular velocity random walk is characterized by a constant PSD of amplitude
and is thus simply white noise on the angular rate respectively acceleration. Integrating this noise gives a random walk process on the angle or velocity output, hence the name. The variance of an arbitrary navigation error state
y from the input
x is already given by (
23). Introducing the angular random walk’s scaling coefficient
N yields:
For the given sine- and cosine-based transfer functions from
Appendix A, this integral can be solved analytically. The lengthy, general solution is given in
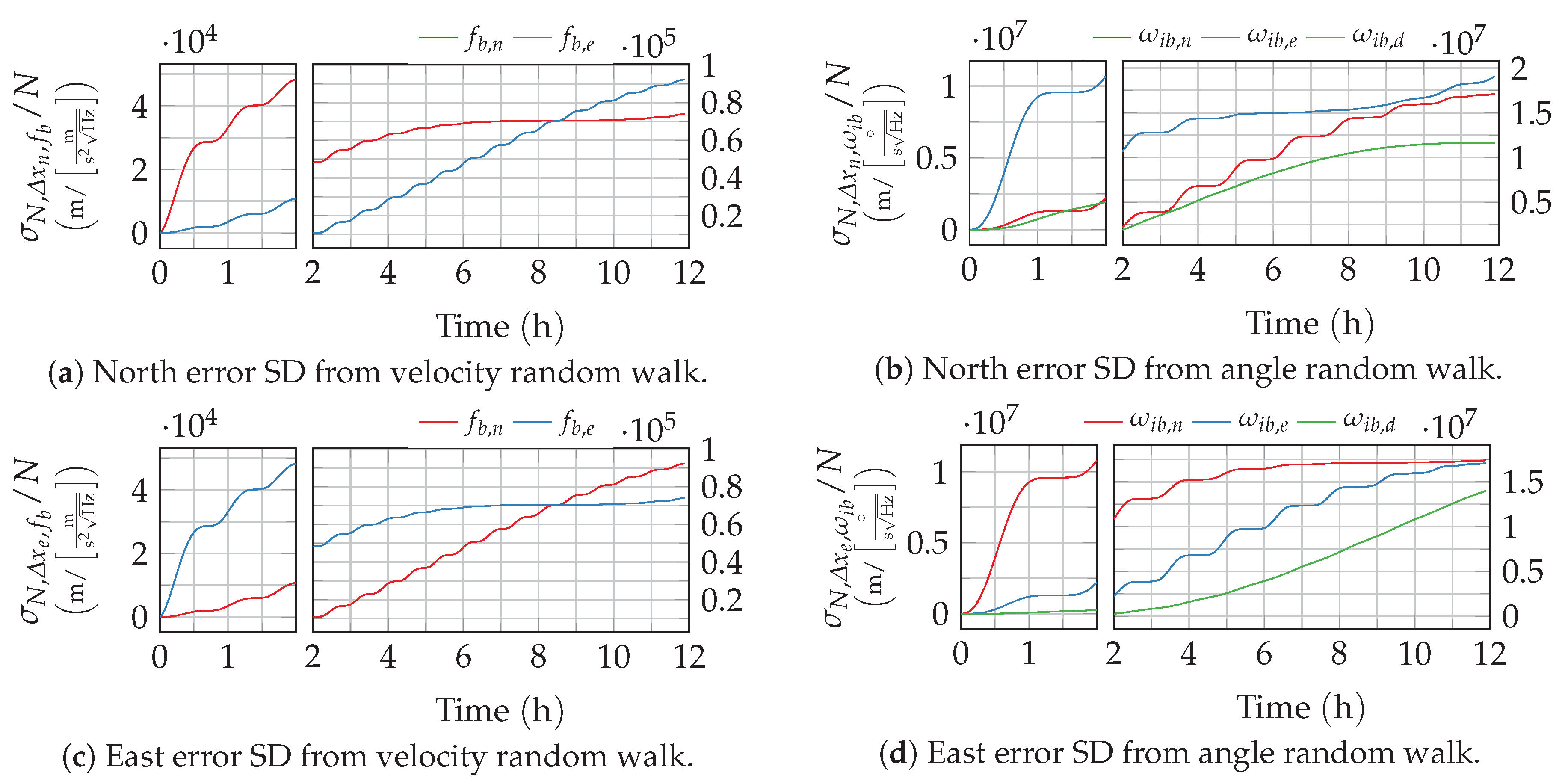
Appendix B. The resulting error growth from angular velocity random walk, described here by the position errors standard deviation (SD)
, is depicted in
Figure 4. These curves match well with the theoretical and numerical results published by Flynn [
7]. As expected, the strapdown error dynamics’ characteristic oscillations, especially the Schuler oscillation, can also be observed in the response to sensor noise.
2.3.2. Rate Random Walk
Rate random walk is a random walk process on the rate measurements. Following
Table A3 it is characterized by a quadratically decreasing PSD (red noise or Brownian noise). The same applies analogously to the acceleration measurement. Random walk is created from time-integration of white noise, which is given by the following transfer function:
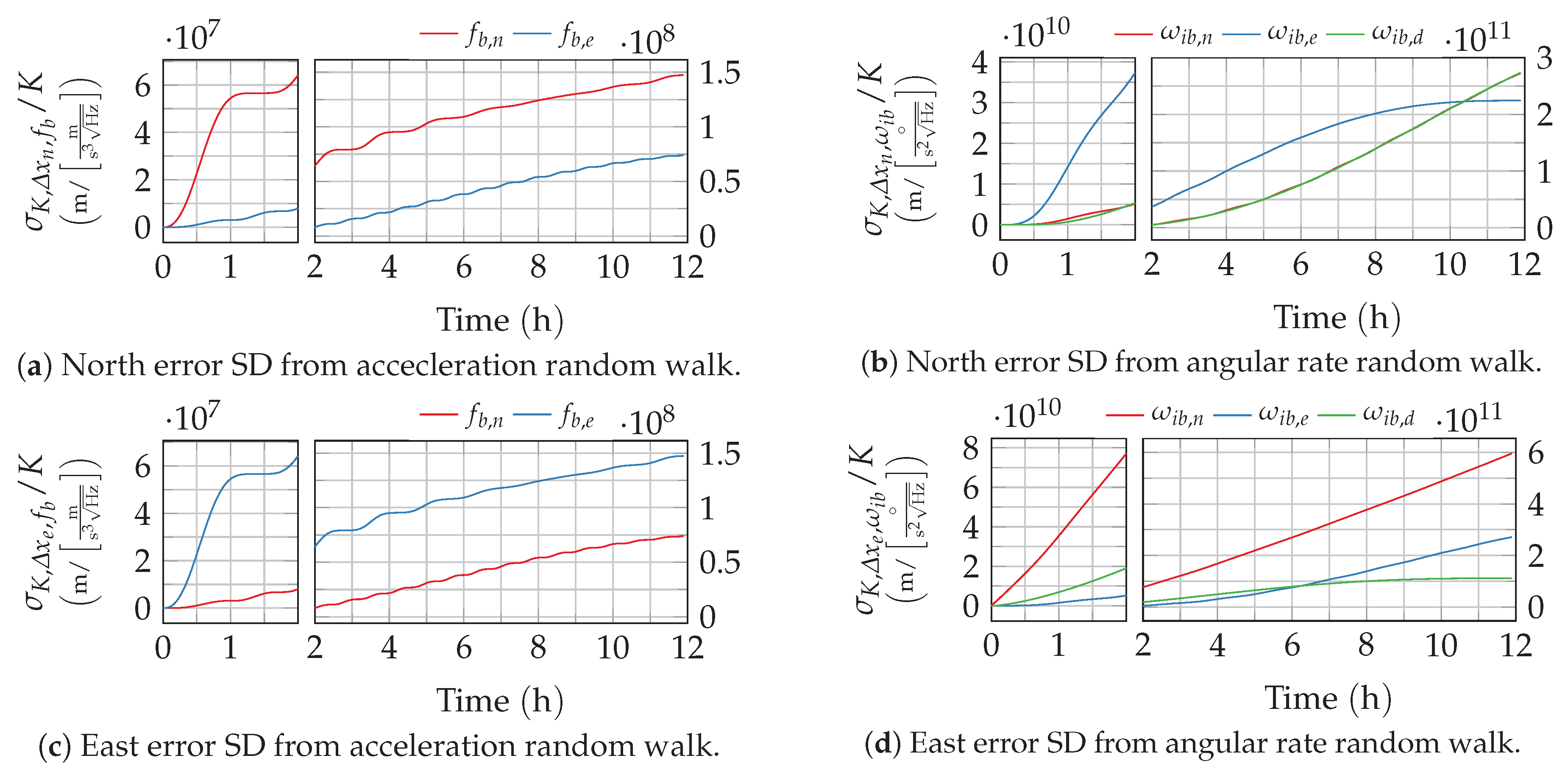
The total system’s impulse response that represents the strapdown error response to rate (or acceleration) random walk is thus simply the time integral of the strapdown navigation error’s impulse response:
Due to their structure, the impulse responses can be easily integrated analytically. Analogous to the angular random walk, the resulting total impulse response and (
23) are finally used to determine the system’s response to rate random walk noise:
Again, this integral can be solved analytically for the impulse responses using the general solution from
Appendix B. The resulting position standard deviations are depicted in
Figure 5.
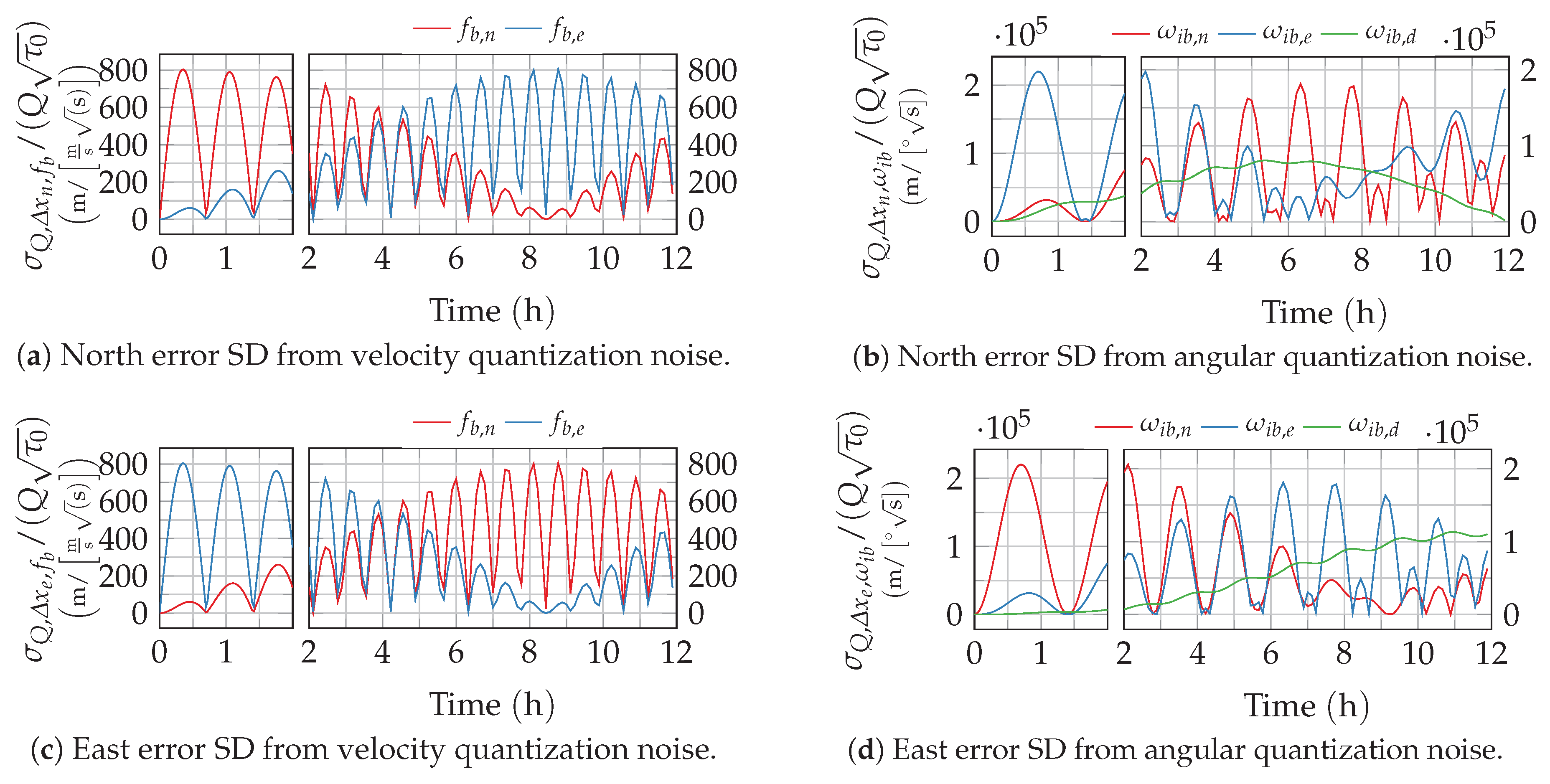
2.3.3. Quantization Noise
Quantization noise is characterized by a quadratically increasing PSD (violet noise), which corresponds to the time-derivative of white noise. The auto-covariance of such noise is given by the second time derivative of the Dirac delta function:
Inserting definition (
29) into (
23) and using the defining PSD from
Table A3 the variance of the navigation error states from quantization noise is determined to:
Note that quantization noise, in contrast to the other noise processes, scales with the sample time
. The resulting normalized position errors from gyro and accelerometer quantization noise are depicted in
Figure 6. In contrast to the other noise processes, quantization noise leads to pure position oscillations and thus to a bounded position error.
An alternative analysis of inertial sensor quantization noise in strapdown navigation, especially in the context of two-speed algorithms, can be found in [
10]. This paper, however, aims to stay within the noise processes framework defined by the IEEE test and specification standards.
2.3.4. In-Run Bias Instability
In-run bias instability is a slow in-run variation of the sensor output’s bias. In
Table A3, the bias instability is defined by a linearly decreasing PSD (flicker noise or pink noise) that is cut off hard at a frequency
. This definition poses two practical problems to the analytical approach that has been used to model the noise processes so far:
- 1.
Generating flicker noise would require a filter with the following irrational transfer function:
There is no LTI system that corresponds to such a transfer function. Although
can be transformed to the time-domain, the resulting impulse response
has little use, since Equation (
21) is only valid for LTI systems. Additionally, the impulse response is not even defined at time
.
- 2.
Also, the theoretical hard cutoff at cannot be represented by a linear filter. In practice, it has to be approximated by a suitable low-pass filter.
Traditionally, flicker noise is approximated by the combination of multiple linear filters [
30]. This approach, however, is only a rough approximation. The longer the signal time, the more poles are required in the filter [
31]. Therefore, another approach is used in this manuscript. As stated above, the impulse response in continuous time cannot be used for the analysis. However, a method proposed by Kasdin [
31] is used to create a time-discrete impulse response that accurately represents power law noise of the full time range of interest. This impulse response used to create power law noise of PSD
is defined recursively:
Note that this discrete-time impulse response is not a time-discretization of the theoretical continuous time impulse response but specifically designed to create a power-law noise sequence that has the desired PSD and auto-correlation.
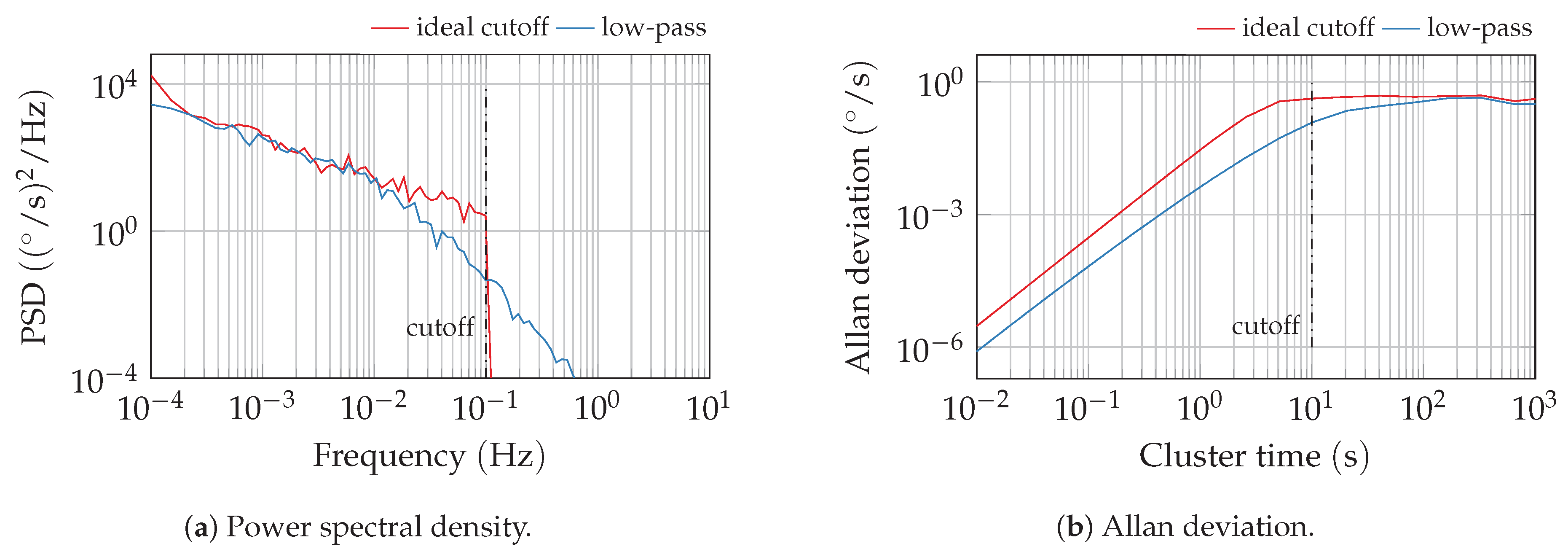
For this analysis, the cutoff in the bias instability is approximated by a first-order low-pass filter. A comparison of bias instability signals with a sharp cutoff and this approximation is depicted in
Figure 7. This approximation shifts the Allan variance slope slightly to higher cluster times but the level of the plateau is virtually unchanged. A reduction of the cutoff time
by a factor of about
compared to the identified cutoff yields a good approximation in simulation (see
Section 3.2). Nevertheless, in practice, the high-frequency parts of sensor noise are highly dominated by other processes such as angular random walk. Consequently, the inaccurate PSD slope beyond the cutoff frequency is covered by the other processes.
With the impulse response of flicker noise, which is Equation (
34) for
, and the following impulse response of a first order low-pass filter with time constant
the final impulse response of a fictive filter that generates bias instability noise can be determined to:
The total system impulse response for bias instability excitation can then be determined using the discrete-time version of (
21):
The output’s variance at time
k is finally determined from [
31]:
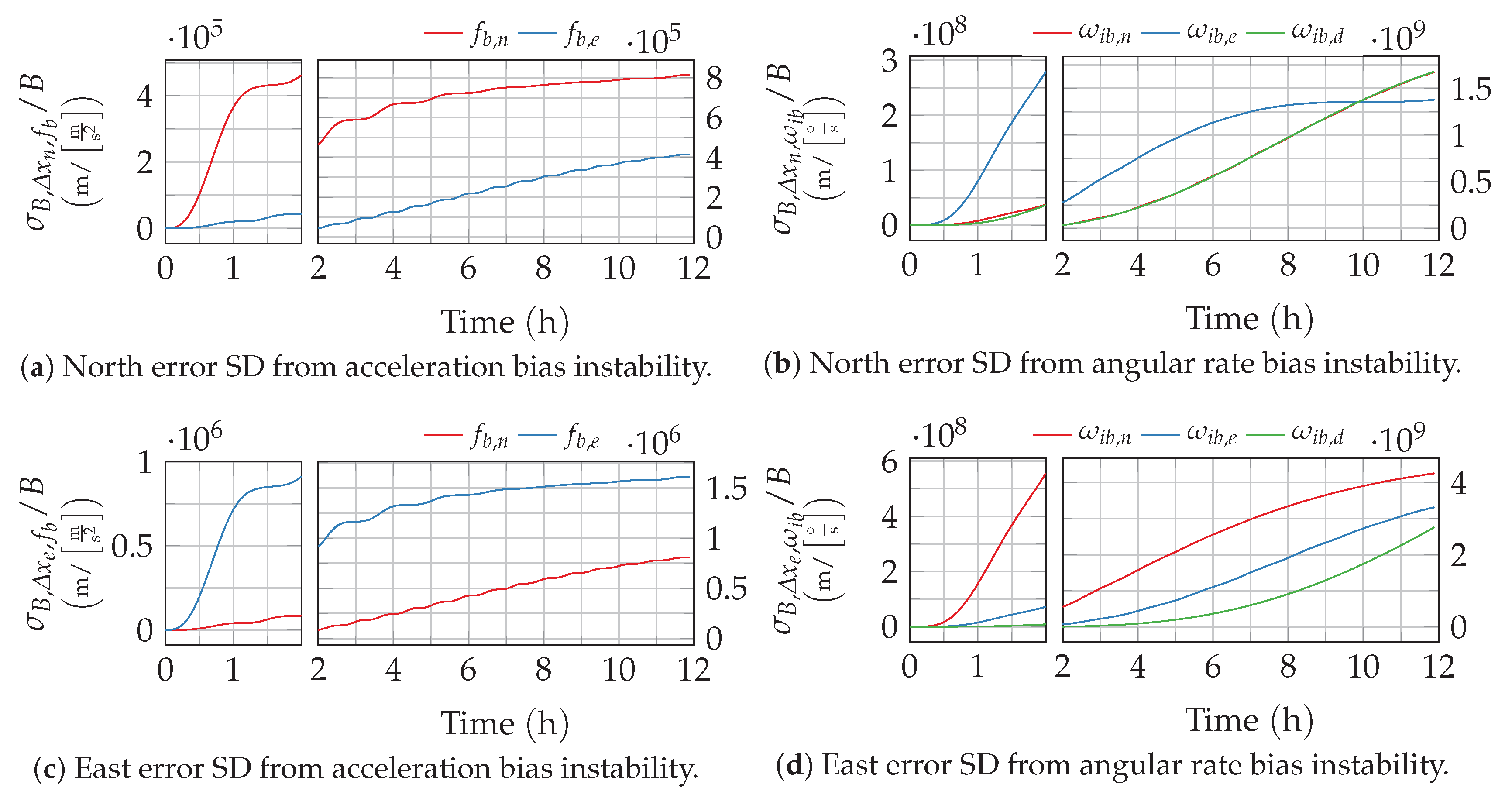
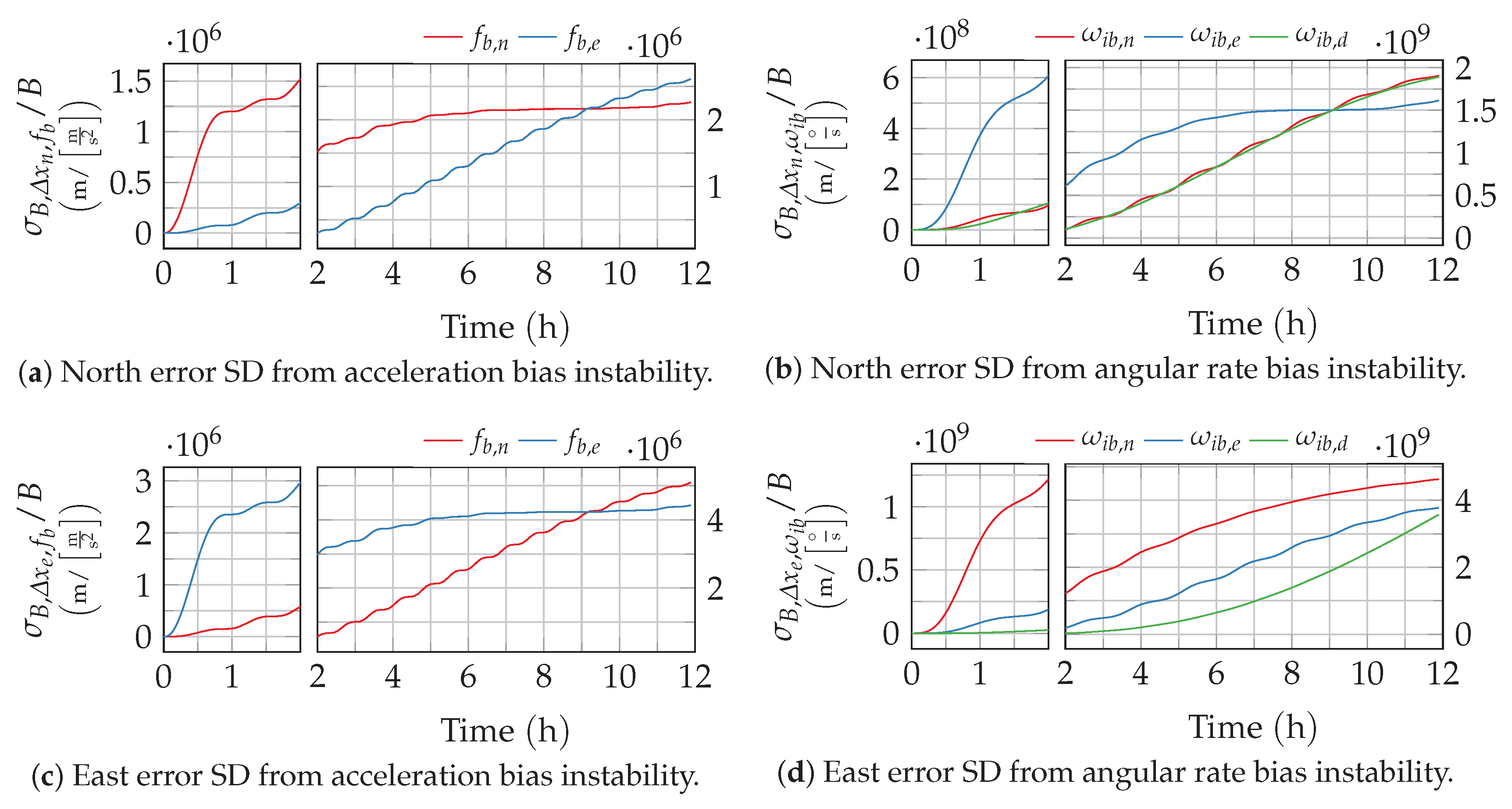
Clearly, the resulting response depends on the selected cutoff frequency
(respectively time constant
). The resulting growth of the position uncertainty is depicted by way of example in
Figure 8 and
Figure 9 for different values of
. Higher time constants, like
, that are typical for optical gyroscopes lead to a slower growth in the short term and a reduction of the Schuler oscillation amplitudes. For the low time of about
, which is more representative for accelerometers, the Schuler oscillations are still clearly visible on top of the long-term error growth. Both observations match with the low-pass-like shape of the bias instability’s PSD.
For assessing and predicting the influence of bias instability on the navigation error, not only the scaling B (which may be given in data sheets), but also the time constant , or at least its approximate magnitude, is required. Both can be determined from e.g., Allan variance charts of the sensor’s noise.
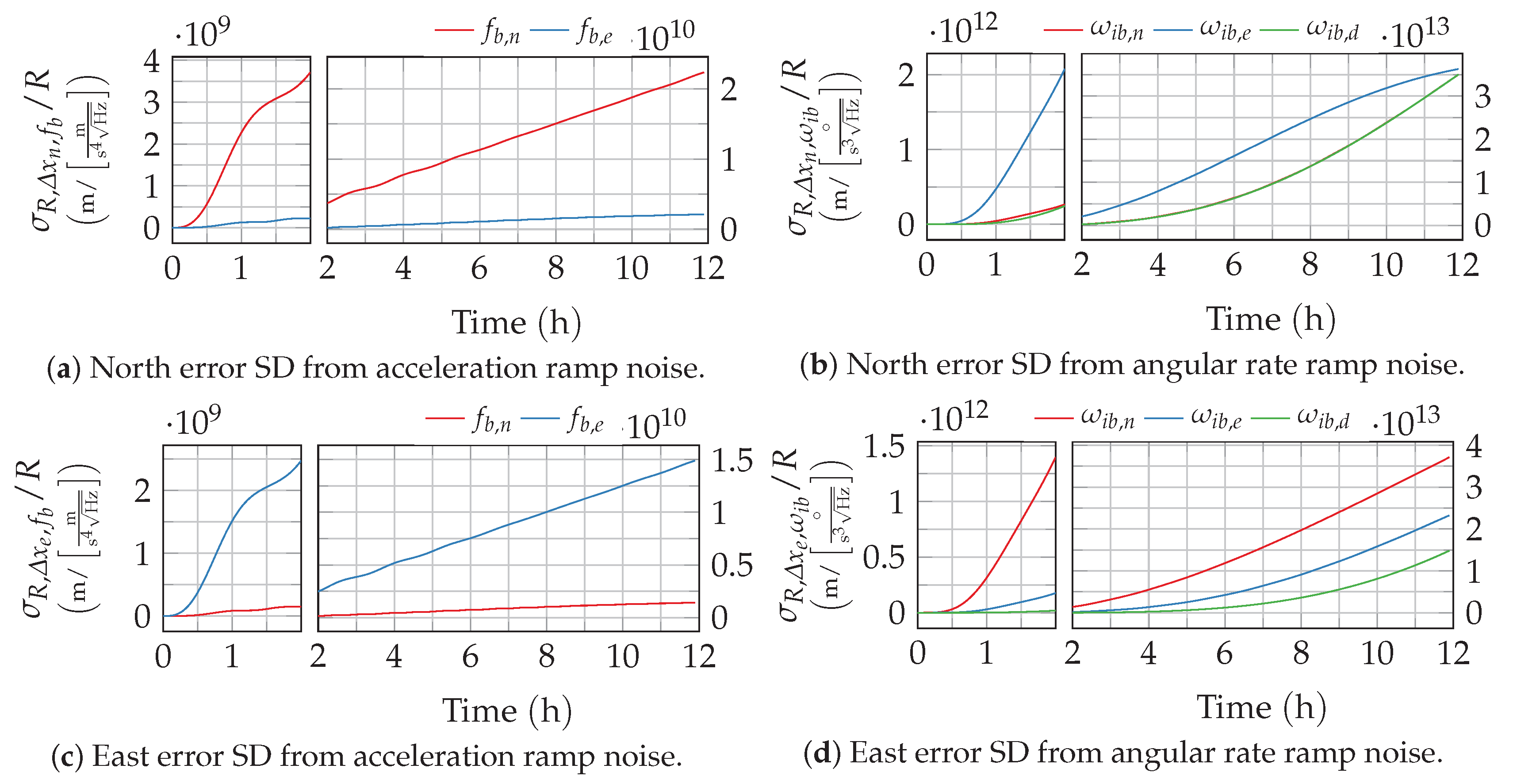
2.3.5. Rate Ramp Noise
As summarized in
Table A3, rate ramp noise, respectively acceleration ramp noise, is characterized by a PSD that declines cubically with the frequency. From this definition, the shaping filter’s transfer function can be easily determined to:
Analogous to the bias instability, this irrational transfer function cannot be handled with the continuous-time approach. However, the already introduced Equation (
34) directly yields the discrete-time impulse response
that shapes rate ramp noise from white noise for
. From that, the total system response is then determined to:
and finally used in
to determine the navigation error variance from rate ramp or acceleration ramp noise. The resulting position error standard deviation over time is depicted in
Figure 10. As rate ramp noise is dominated by low-frequency parts, the position error growths show even less dynamics than the bias instability.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





















