Think Aloud Protocol Applied in Naturalistic Driving for Driving Rules Generation





Abstract
1. Introduction
2. What Is the Think Aloud Protocol?
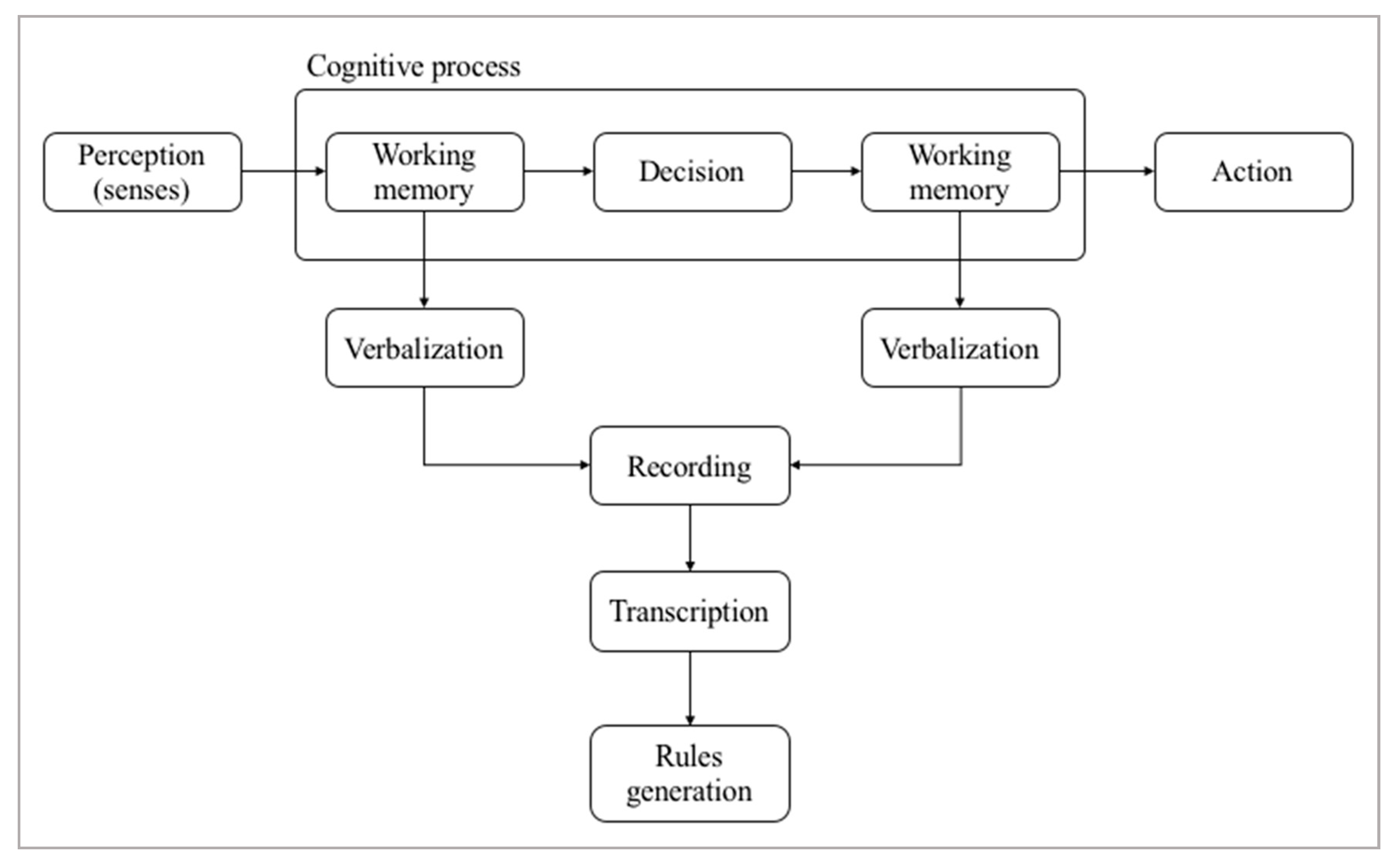
- Perceive the environment.
- Decision making after a cognitive process.
- Execute the planned action.
- Modify the environment.
3. Experimental Setting and Data Collection
4. Cognitive Process
- Stop the vehicle.
- Analyze the circulation.
- Resume the route.
- Check traffic coming from the left.
- Check traffic coming from the right.
- Check traffic coming from the front.
5. Case of a Roundabout Maneuver
| IF approaching_roundabout THEN reduce speed WHILE other_vehicle_inside_roundabout THEN Stop speed(increase) speed(hold) direction(right) blinker(left) direction(left) blinker(right) direction(right) speed(increase) |
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Ozguner, U.; Redmill, K.A.; Broggi, A. Team TerraMax and the DARPA grand challenge: A general overview. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004. [Google Scholar]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. In The 2005 DARPA Grand Challenge: The Great Robot Race; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2007; Volume 36, pp. 1–43. [Google Scholar]
- Automated Driving Systems (ADS): A Vision for Safety 2.0. 2017. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/documents/13069a-ads2.0_090617_v9a_tag.pdf (accessed on 1 December 2020).
- World Health Organization. 10 Facts about Road Safety. 2018. Available online: https://www.who.int/news-room/facts-in-pictures/detail/road-safety (accessed on 1 December 2020).
- Li, X.; Chimba, D.; Masindoki, E. The Economic and Societal Impact of Motor Vehicle Crashes on Freight Intermodal Connectors in Tennessee: A Risk Management Approach. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Blana, E. A Survey of Driving Research Simulators around the World; Institute of Transport Studies, University of Leeds: Leeds, UK, 1996. [Google Scholar]
- Kaptein, N.A.; Theeuwes, J.; Van Der Horst, R. Driving Simulator Validity: Some Considerations. Transp. Res. Rec. J. Transp. Res. Board 1996, 1550, 30–36. [Google Scholar] [CrossRef]
- Shechtman, O.; Classen, S.; Awadzi, K.; Mann, W. Comparison of driving errors between on-the-road and simulated driving assessment: A validation study. Traffic. Inj. Prev. 2009, 10, 379–385. [Google Scholar] [CrossRef] [PubMed]
- Helander, M.; Hagvall, B. An instrumented vehicle for studies of driver behaviour. Accid. Anal. Prev. 1976, 8, 271–277. [Google Scholar] [CrossRef]
- Boer, E.R. Tangent point oriented curve negotiation. In Proceedings of the Conference on Intelligent Vehicles, Tokyo, Japan, 19–20 September 1996. [Google Scholar]
- Hess, R.A.; Modjtahedzadeh, A. A Control Theoretic Model of Driver Steering Behavior. IEEE Control Syst. Mag. 1990, 10, 3–8. [Google Scholar] [CrossRef]
- Levison, W.H.; Cramer, N.L. Description of the Integrated Driver Model; (Tech. Rep. No. FHWA-RD-94-092). Federal Highway Administration, Office of Research and Development, McLean VA Remarks: Performed by BBN Systems and Technologies for the Federal Highway Administration, Office of Safety and Traffic Operations. 1995. Available online: https://trid.trb.org/view/490162 (accessed on 1 December 2020).
- Salvucci, D.D.; Boer, E.R.; Liu, A. Toward an integrated model of driver behavior in cognitive architecture. Transp. Res. Record 2001, 1779, 9–16. [Google Scholar] [CrossRef]
- Barnard, Y.; Utesch, F.; van Nes, N.; Eenink, R.; Baumann, M. The study design of UDRIVE: The naturalistic driving study across Europe for cars, trucks and scooters. Eur. Transp. Res. Rev. 2016, 8, 14. [Google Scholar] [CrossRef]
- Tawfeek, M.H.; El-Basyouny, K. A perceptual forward collision warning model using naturalistic driving data. Can. J. Civ. Eng. 2018, 45, 899–907. [Google Scholar] [CrossRef]
- Ali, E.M.; Ahmed, M.M.; Wulff, S.S. Detection of critical safety events on freeways in clear and rainy weather using SHRP2 naturalistic driving data: Parametric and non-parametric techniques. Saf. Sci. 2019, 119, 141–149. [Google Scholar] [CrossRef]
- Chen, R.; Kusano, K.D.; Gabler, H.C. Age and Gender Difference in Braking Behavior from the 100-Car Naturalistic Driving Study: The Implication for Autonomous Braking System Design. In Proceedings of the FAST-Zero’15: 3rd International Symposium on Future Active Safety Technology toward Zero Traffic Accidents, Gothenburg, Sweden, 9–11 September 2015. [Google Scholar]
- Monsalve, B.; Puertas, E.; Fernandez, J.; Aliane, N. Using wearable devices in naturalistic driving to analyze brain activity in roundabout maneuvers. In Proceedings of the 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain, 12–14 September 2018. [Google Scholar]
- Van Schagen, I.; Sagberg, F. The Potential Benefits of Naturalistic Driving for Road Safety Research: Theoretical and Empirical Considerations and Challenges for the Future. Procedia-Soc. Behav. Sci. 2012, 48, 692–701. [Google Scholar] [CrossRef]
- Ericsson, K.A.; Simon, H.A. How to study thinking in everyday life: Contrasting think-aloud protocols with descriptions and explanations of thinking. Mind Cult. Cult. Act. 1998, 5, 178–186. [Google Scholar] [CrossRef]
- Bernardini, S. Think-aloud protocols in translation research: Achievements, limits, future prospects. Target 2001, 13, 241–263. [Google Scholar] [CrossRef]
- Jaspers, M.W.M.; Steen, T.; Van Den Bos, C.; Geenen, M. The think aloud method: A guide to user interface design. Int. J. Med. Inform. 2004, 73, 781–795. [Google Scholar] [CrossRef] [PubMed]
- Neuhuber, N.; Lechner, G.; Kalayci, T.E.; Stocker, A.; Kubicek, B. Age-Related Differences in the Interaction with Advanced Driver Assistance Systems—A Field Study. In International Conference on Human-Computer Interaction, Proceedings of the HCII 2020: HCI in Mobility, Transport, and Automotive Systems. Automated Driving and In-Vehicle Experience Design, Copenhagen, Denmark, 19–24 July 2020; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Krampell, M.; Solís-Marcos, I.; Hjälmdahl, M. Driving automation state-of-mind: Using training to instigate rapid mental model development. Appl. Ergon. 2020, 83, 102986. [Google Scholar] [CrossRef] [PubMed]
- Grahn, H.; Kujala, T.; Silvennoinen, J.; Leppänen, A.; Saariluoma, P. Expert Drivers’ Prospective Thinking-Aloud to Enhance Automated Driving Technologies—Investigating Uncertainty and Anticipation in Traffic. Accid. Anal. Prev. 2020, 146, 105717. [Google Scholar] [CrossRef]
- Lewis, C. Using the ‘Thinking Aloud’ Method in Cognitive Interface Design; Research Report, RC-9265; IBM TJ Watson Research Center: Yorktown Heights, NY, USA, 1982. [Google Scholar]
- Newell, A.; Simon, H.A. Human Problem Solving; Carnegie-Mellon University: Pittsburgh, PA, USA; Prentice-Hall: Englewood Cliffs, NJ, USA, 1972. [Google Scholar]
- Li, D. Trustworthiness of think-aloud protocols in the study of translation processes. Int. J. Appl. Linguist. 2004, 14, 301–313. [Google Scholar] [CrossRef]
- Olmsted-Hawala, E.L.; Murphy, E.D.; Hawala, S.; Ashenfelter, K.T. Think-aloud protocols: A comparison of three think-aloud protocols for use in testing data-dissemination web sites for usability. In Proceedings of the Conference on Human Factors in Computing Systems, Atlanta, GA, USA, 10–15 April 2010. [Google Scholar]
- Armengol, L. Los protocolos de pensamiento en voz alta como instrumento para analizar el proceso de escritura. Rev. Española Lingüística Apl. 2007, 20, 27–35. [Google Scholar]
- Van Den Haak, M.; De Jong, M.; Jan Schellens, P. Retrospective vs. concurrent think-aloud protocols: Testing the usability of an online library catalogue. Behav. Inf. Technol. 2003, 22, 339–351. [Google Scholar] [CrossRef]
- Jørgensen, A.H. Thinking-aloud in user interface design: A method promoting cognitive ergonomics. Ergonomics 1990, 33, 501–507. [Google Scholar] [CrossRef]
- Ericsson, K.A.; Simon, H.A. Protocol Analysis: Verbal Reports as Data; MIT Press: Cambridge, MA, USA, 1993. [Google Scholar]
- Van Someren, M.W.; Barnard, Y.F.; Sandberg, J.A.C. The Think aloud Method: A Practical Approach to Modelling Cognitive Processes; Academic Press: Amsterdam, The Netherlands; London, UK, 1994. [Google Scholar]
- Código de Tráfico y Seguridad Vial. Available online: http://www.dgt.es/images/BOE-020_Codigo_de_Trafico_y_Seguridad_Vial.pdf (accessed on 1 December 2020).
- Rossi, R.; Meneguzzer, C.; Orsini, F.; Gastaldi, M. Gap-acceptance behavior at roundabouts: Validation of a driving simulator environment using field observations. Transp. Res. Procedia 2020, 47, 27–34. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V. Parametric-based path generation for automated vehicles at roundabouts. Expert Syst. Appl. 2017, 71, 332–341. [Google Scholar] [CrossRef]
- Anagnostopoulos, A.; Kehagia, F. CAVs and roundabouts: Research on traffic impacts and design elements. Transp. Res. Procedia 2020, 49, 83–94. [Google Scholar] [CrossRef]
- Cuenca, L.G.; Sanchez-Soriano, J.; Puertas, E.; Aliane, N.; Andrés, J.F. Machine learning techniques for undertaking roundabouts in autonomous driving. Sensors 2019, 19, 2386. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Action | Code | Description |
|---|---|---|---|
| Sight | Front view | FV | Look forward in the driving direction |
| Sight | Front view to the rearview mirror | FV-Mirror | Look through the interior rearview mirror |
| Sight | Left view | LV | Look left |
| Sight | Left mirror | LV-Mirror | Look left through the left external mirror |
| Sight | Front-Left view | FLV | Look diagonally, between front and left |
| Sight | Right view | RV | Look right |
| Sight | Right mirror | RV-Mirror | Look left through the right external mirror |
| Sight | Front-Right view | FRV | Look diagonally, between front and right |
| Sight | Back view | BV | Look turning head back. |
| Sight | Back-Left view | BLV | Look back diagonally between left and rear of the vehicle. |
| Sight | Back-Right view | BRV | Look back diagonally between right and rear of the vehicle. |
| Sound | Inside sound | IN-S | Sound from inside the vehicle |
| Sound | Outside sound | OUT-S | Sound coming from outside the vehicle |
| Category | Action | Code | Description |
|---|---|---|---|
| Hands | Turning steering wheel left | SW-TL-L | Turn the steering wheel to the left to change direction to the left |
| Hands | Turning steering wheel left | SW-TL-S | Turn the steering wheel to the left to straighten the car and continue straight |
| Hands | Turning steering wheel right | SW-TR-R | Turn the steering wheel to the right to change direction to the right |
| Hands | Turning steering wheel right | SW-TR-S | Turn the steering wheel to the right to straighten the car and continue straight |
| Hands | Gear down | GD | Reduce N gears to decrease speed |
| Hands | Gear up | GU | Increase N gears to increase speed |
| Hands | Left blinker light on | LB-ON | Use the turn signal switch to turn the left light blinker on |
| Hands | Left blinker light off | LB-OFF | Use the turn signal switch to turn the left light blinker off |
| Hands | Right blinker light on | RB-ON | Use the turn signal switch to turn the left right blinker on |
| Hands | Right blinker light off | RB-OFF | Use the turn signal switch to turn the left right blinker off |
| Feet | Activate clutch pedal | G-ON | Activate the clutch pedal to initiate gear changing |
| Feet | Release clutch pedal | G-OFF | Release the clutch pedal to finish gear changing |
| Feet | Push throttle pedal | T-ON | Push the throttle further to increase speed |
| Feet | Hold throttle pedal | T-HOLD | Keep throttle pedal pressed to maintain stable speed |
| Feet | Release throttle pedal | T-OFF | Release throttle pedal to deaccelerating the vehicle and reduce speed |
| Feet | Push brake pedal | B-ON | Push brake pedal to reduce speed. It implies having previously released the accelerator |
| Feet | Release brake pedal | B-OFF | Release the brake pedal to stop braking the car |
| Section | Roundabout Approaching |
| Duration | 20 s |
| Transcription | “I let the car go slowly <T-OFF>, brake a little <B-ON>. I engage the clutch <G-ON>, I go into third gear <GD>, I take my feet off the pedals <G-OFF>, I apply the brakes again a little bit <B-ON>… I keep braking <B-ON> <SW-TR -R> a red car is coming up behind me <FV-MIRROR>. I shift into second gear <G-ON> <GU>, I release the clutch <G-OFF>, brake <B-ON> because here <SW-TL-S> <LV> there was a car at the roundabout.” |
| Section | Inside roundabout |
| Duration | 15 s |
| Transcription | “<LV> Now we are going to go through <T-ON> <SW-TR-R> <T-HOLD> and now I turn on the blinker to the left <LB-ON> <SW-TL-L>, now I turn on the blinker to the right <RB-ON>. And I am going to exit here at the <SW-TR-R> roundabout behind the white car.” |
| Section | Roundabout exit |
| Duration | 6 s |
| Transcription | “The blinker turns off <SW-TR-R> <SW-TL-S> <T-ON>, I pass the crosswalk, in that other crosswalk there is no one, so I keep going.” |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monsalve, B.; Aliane, N.; Puertas, E.; Andrés, J.F. Think Aloud Protocol Applied in Naturalistic Driving for Driving Rules Generation. Sensors 2020, 20, 6907. https://doi.org/10.3390/s20236907
Monsalve B, Aliane N, Puertas E, Andrés JF. Think Aloud Protocol Applied in Naturalistic Driving for Driving Rules Generation. Sensors. 2020; 20(23):6907. https://doi.org/10.3390/s20236907
Chicago/Turabian StyleMonsalve, Borja, Nourdine Aliane, Enrique Puertas, and Javier Fernández Andrés. 2020. "Think Aloud Protocol Applied in Naturalistic Driving for Driving Rules Generation" Sensors 20, no. 23: 6907. https://doi.org/10.3390/s20236907
APA StyleMonsalve, B., Aliane, N., Puertas, E., & Andrés, J. F. (2020). Think Aloud Protocol Applied in Naturalistic Driving for Driving Rules Generation. Sensors, 20(23), 6907. https://doi.org/10.3390/s20236907