Global Revisit Interval Analysis of Landsat-8 -9 and Sentinel-2A -2B Data for Terrestrial Monitoring


Abstract
:1. Introduction
2. Data
2.1. Orbit Swath Information
2.2. Daytime Surface Observation Metadata Records for Landsat-8 and Sentinel-2A -2B
2.3. Surface Reflectance Observations for Landsat-8
3. Material and Methods
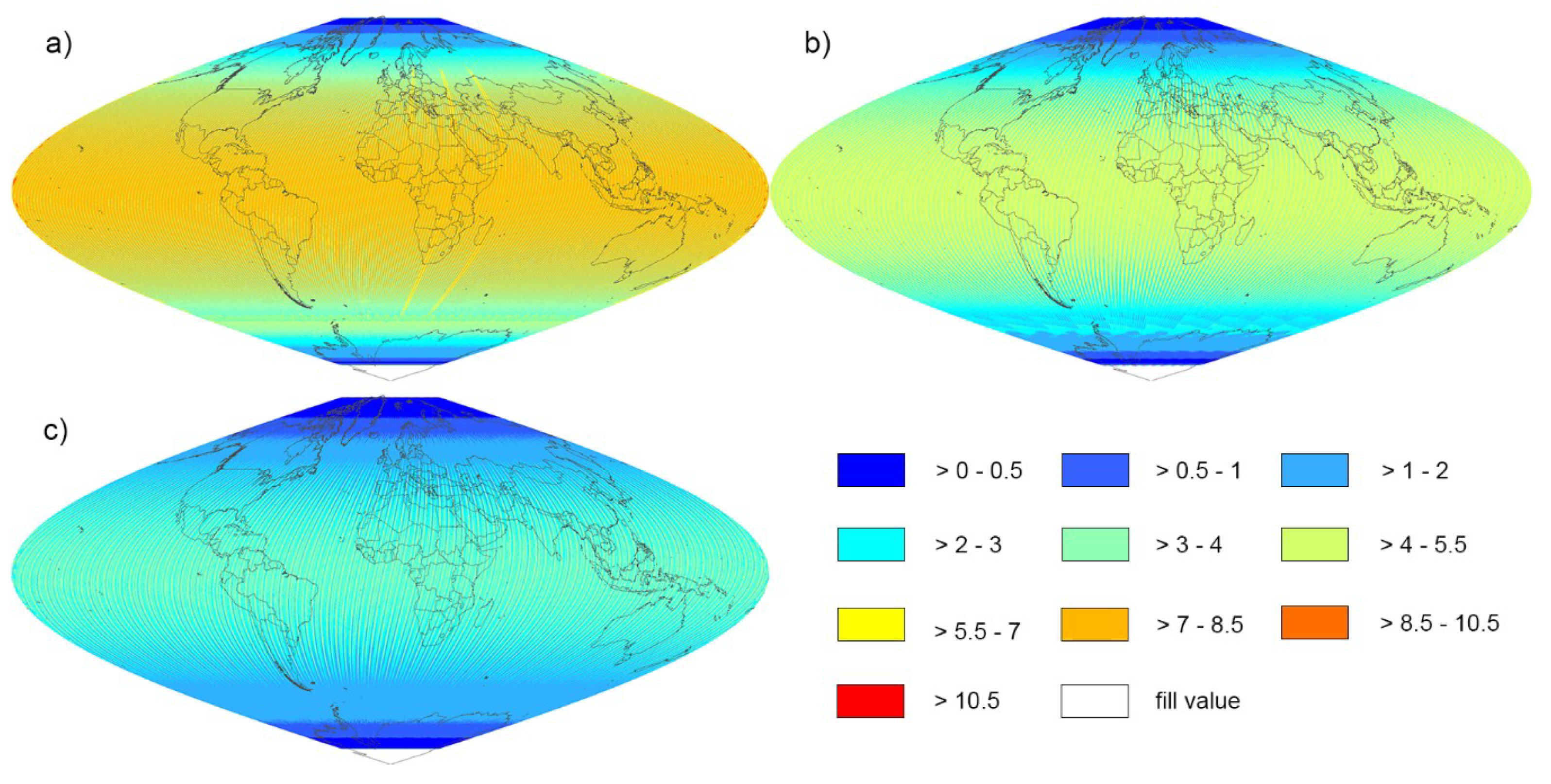
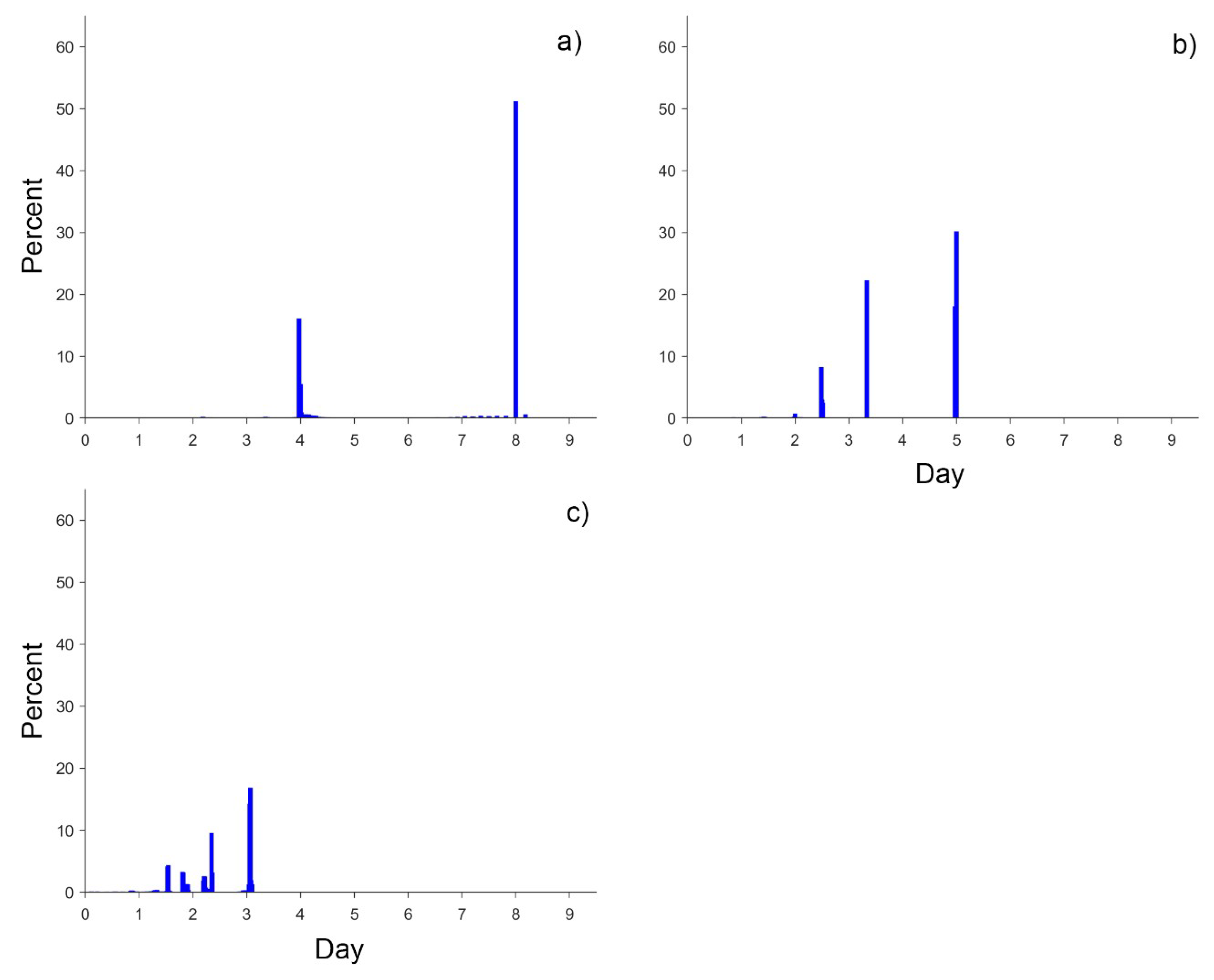
3.1. Global Average Revisit Intervals for Combination of Landsat-8/9 and Sentinel-2A/2B
3.2. Global Number of Observation Maps for the Daytime Surface Observations of Landsat-8 and Sentinel-2A -2B
4. Results
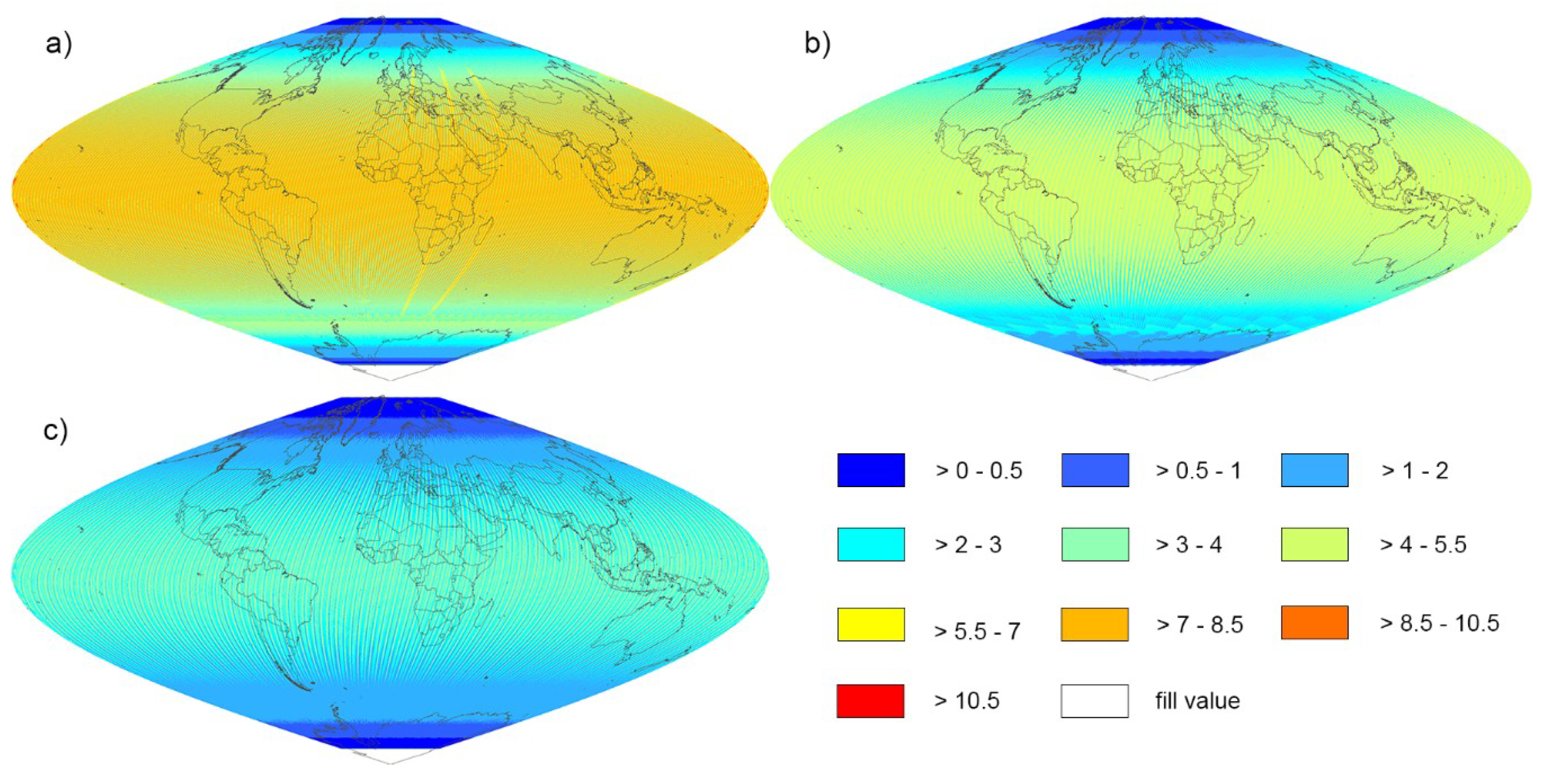
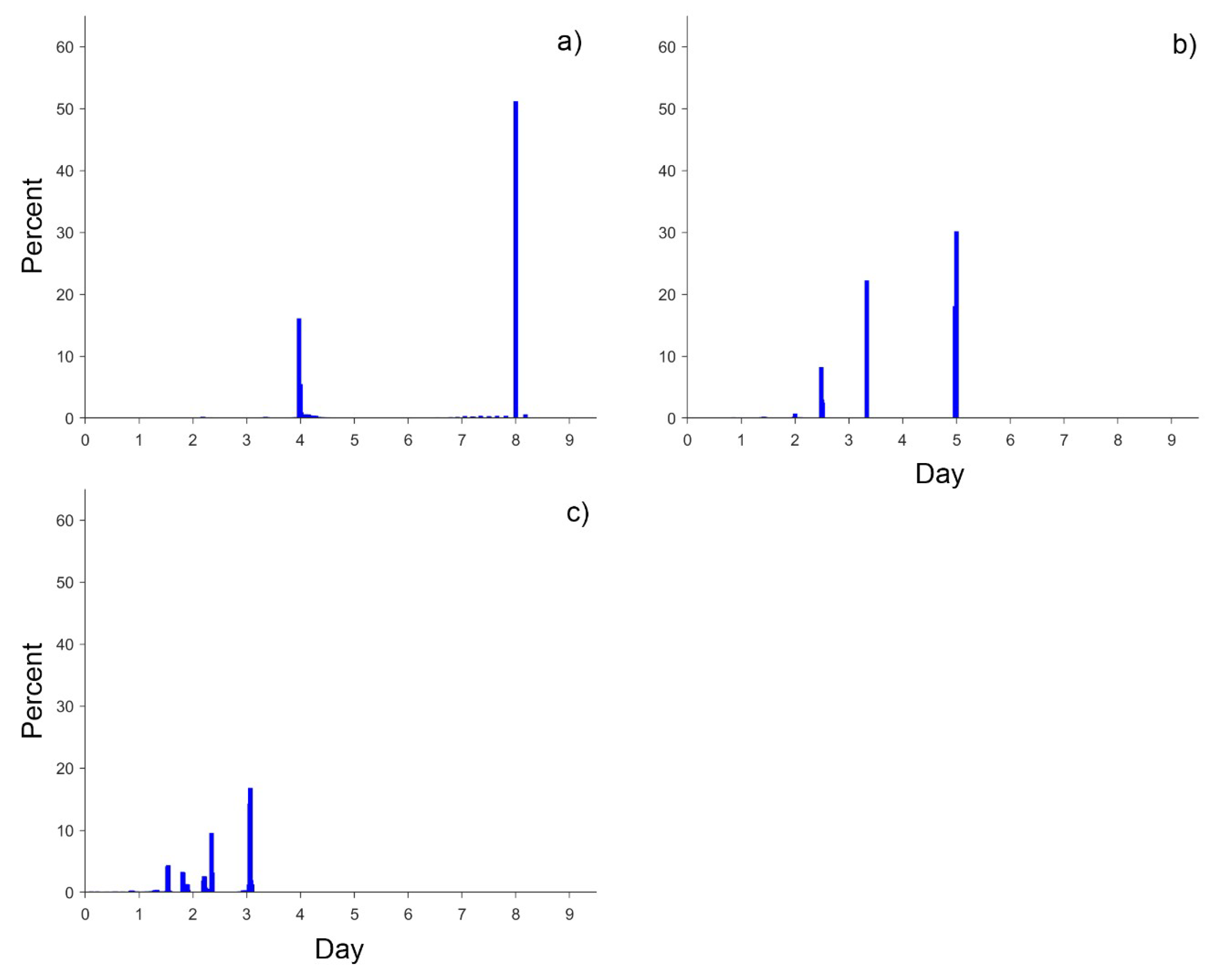
4.1. Global Average Revisit Intervals for Combination of Landsat-8/9 and Sentinel-2A/2B
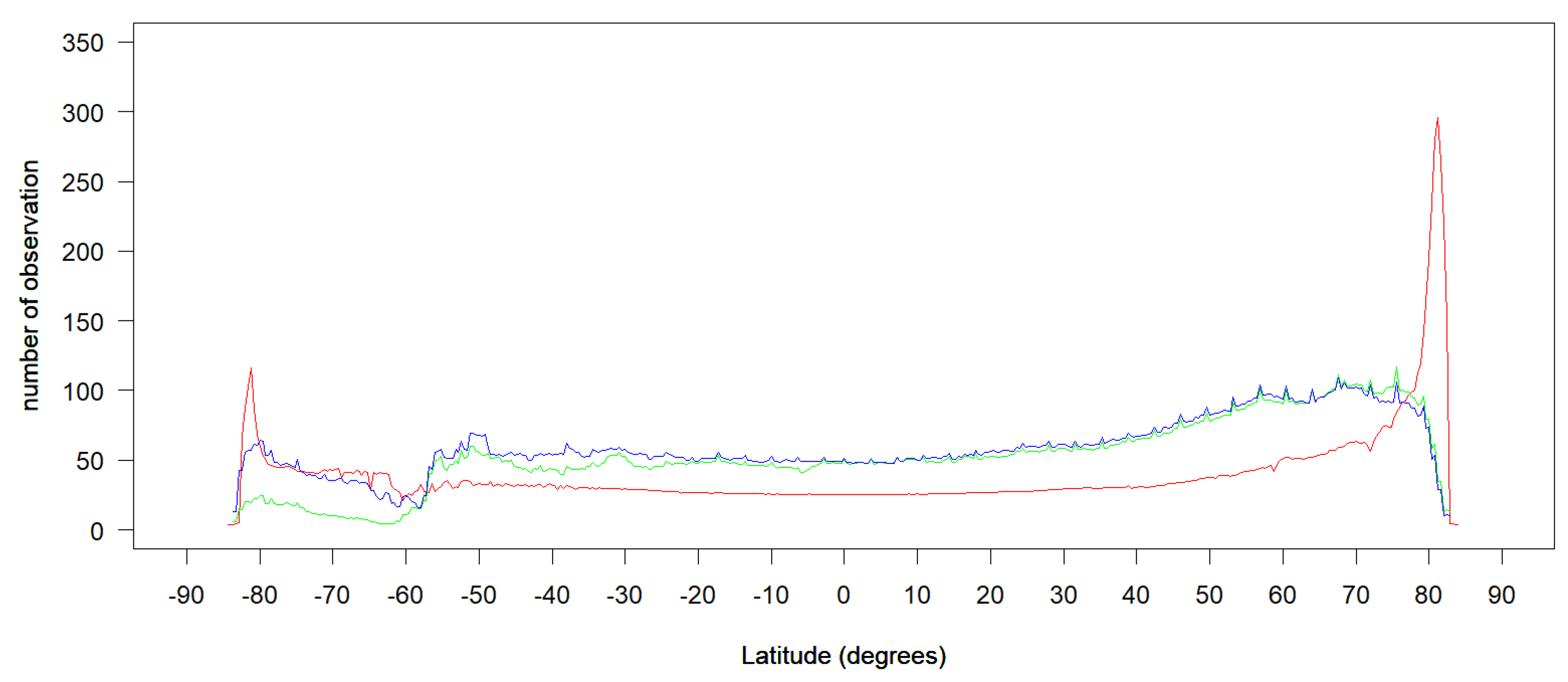
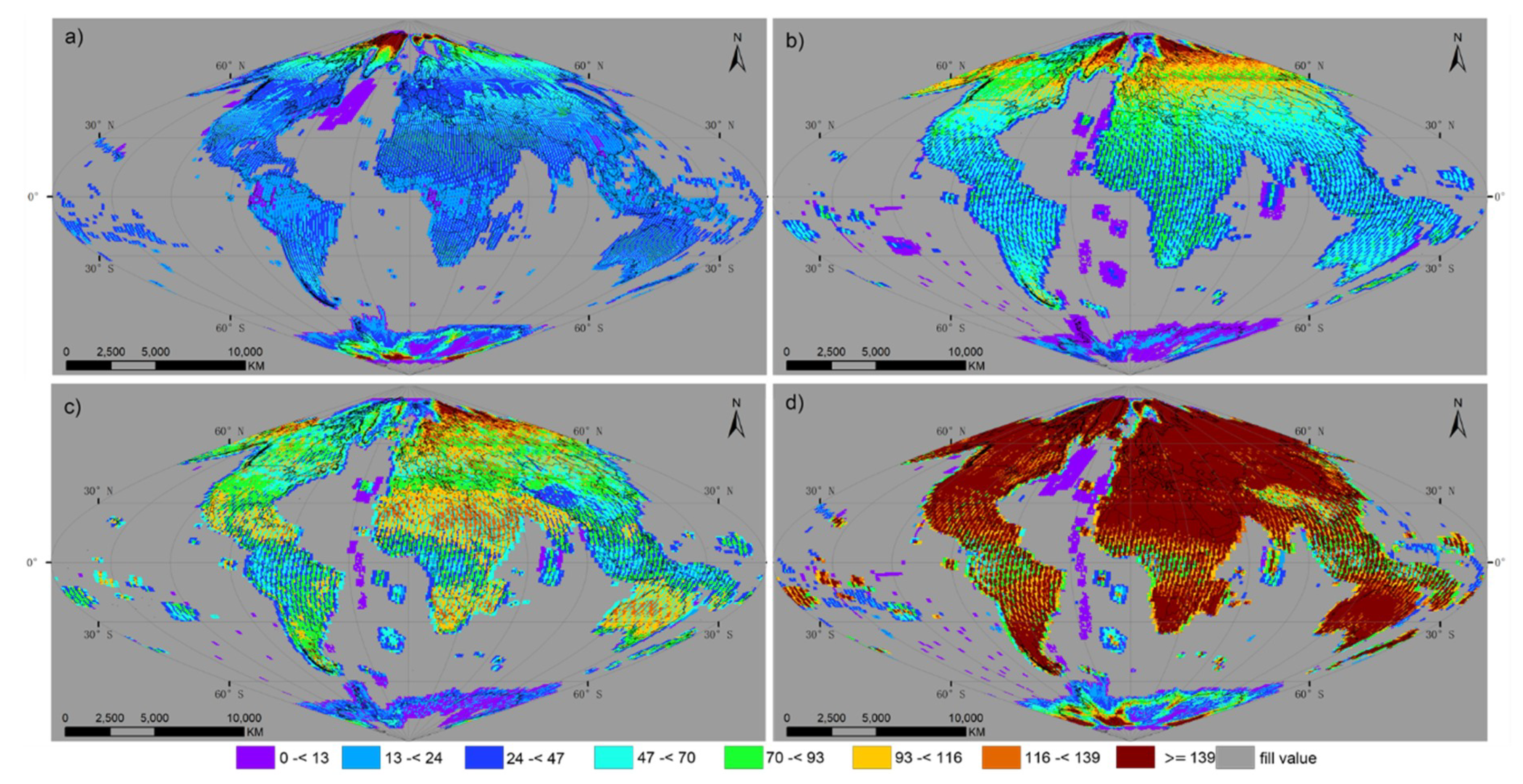
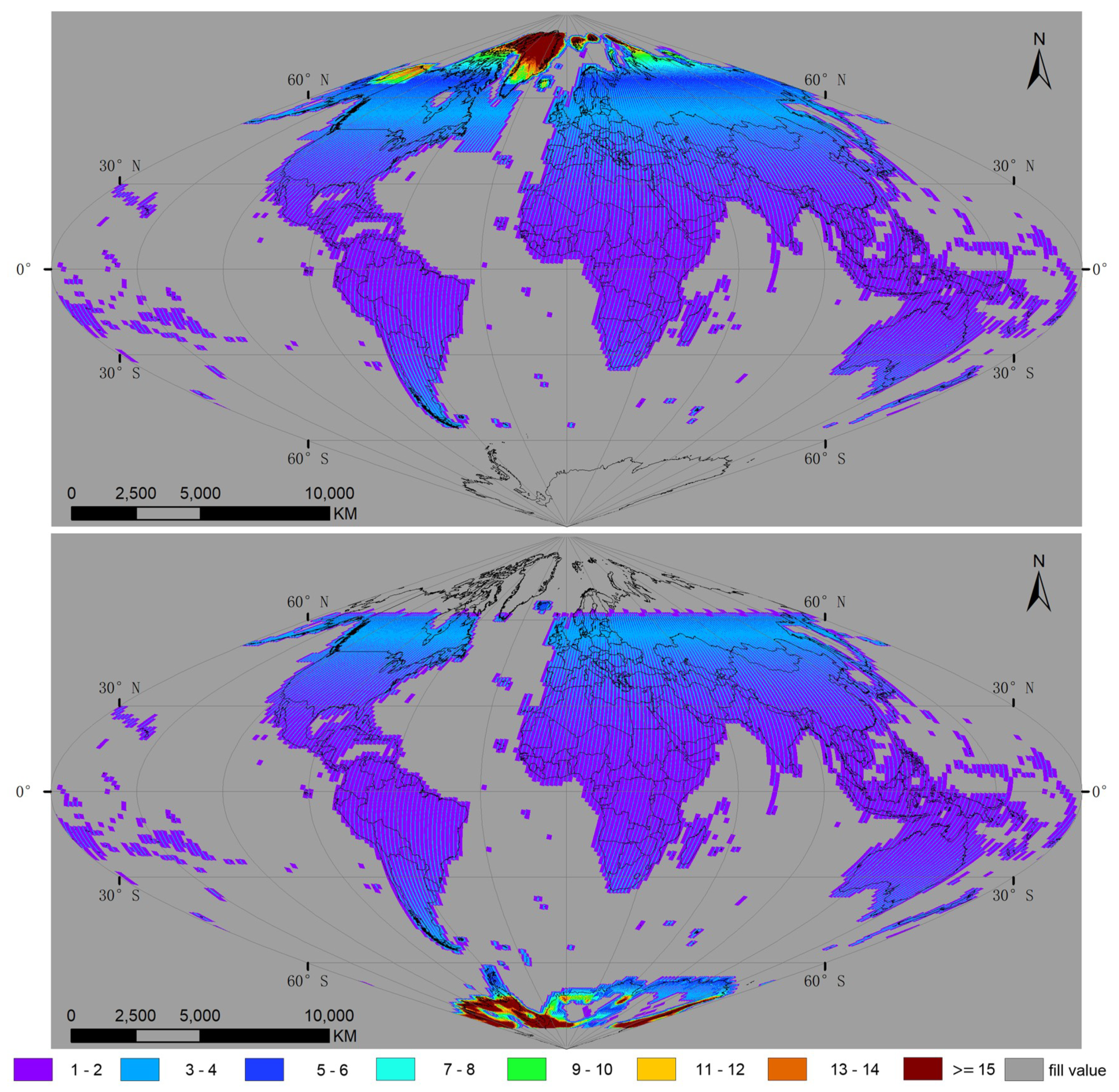
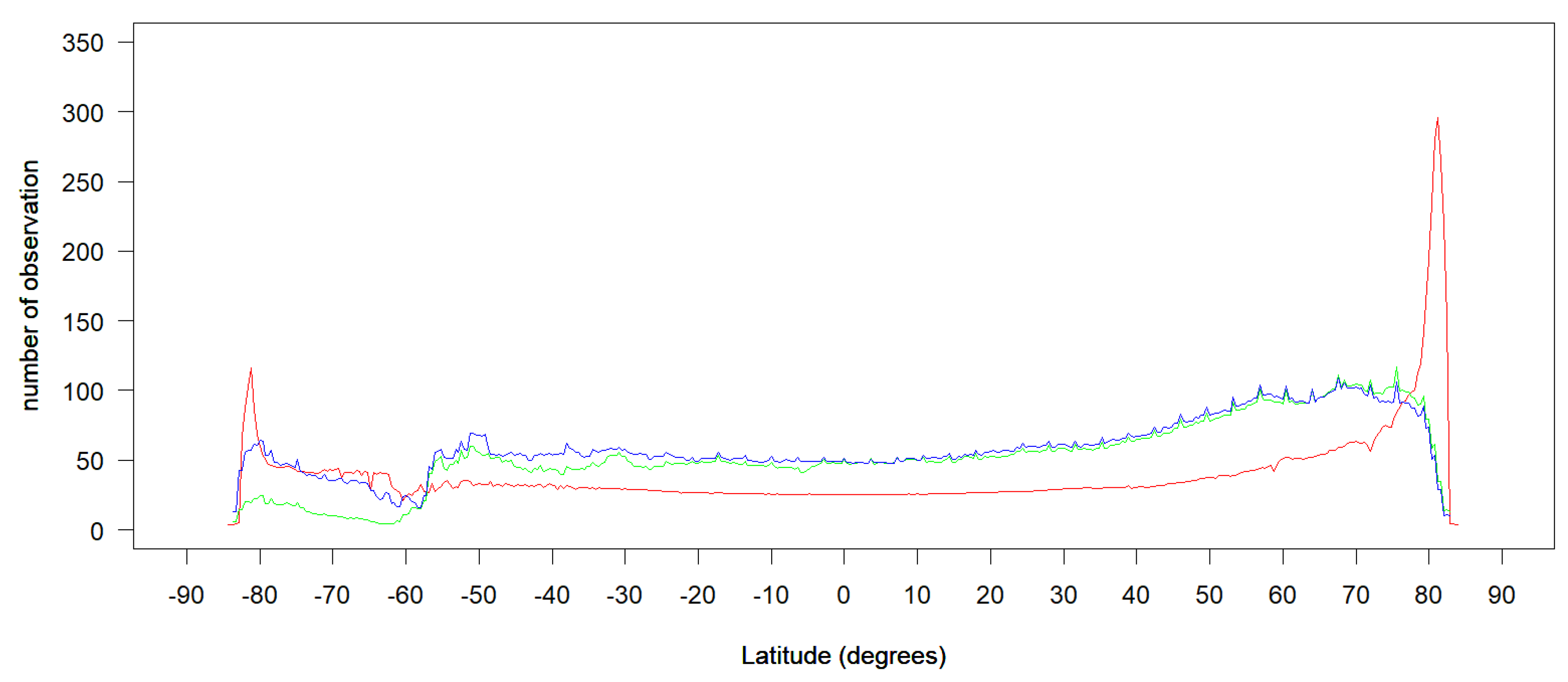
4.2. Global Number of Observations for Landsat-8 and Sentinel-2A -2B
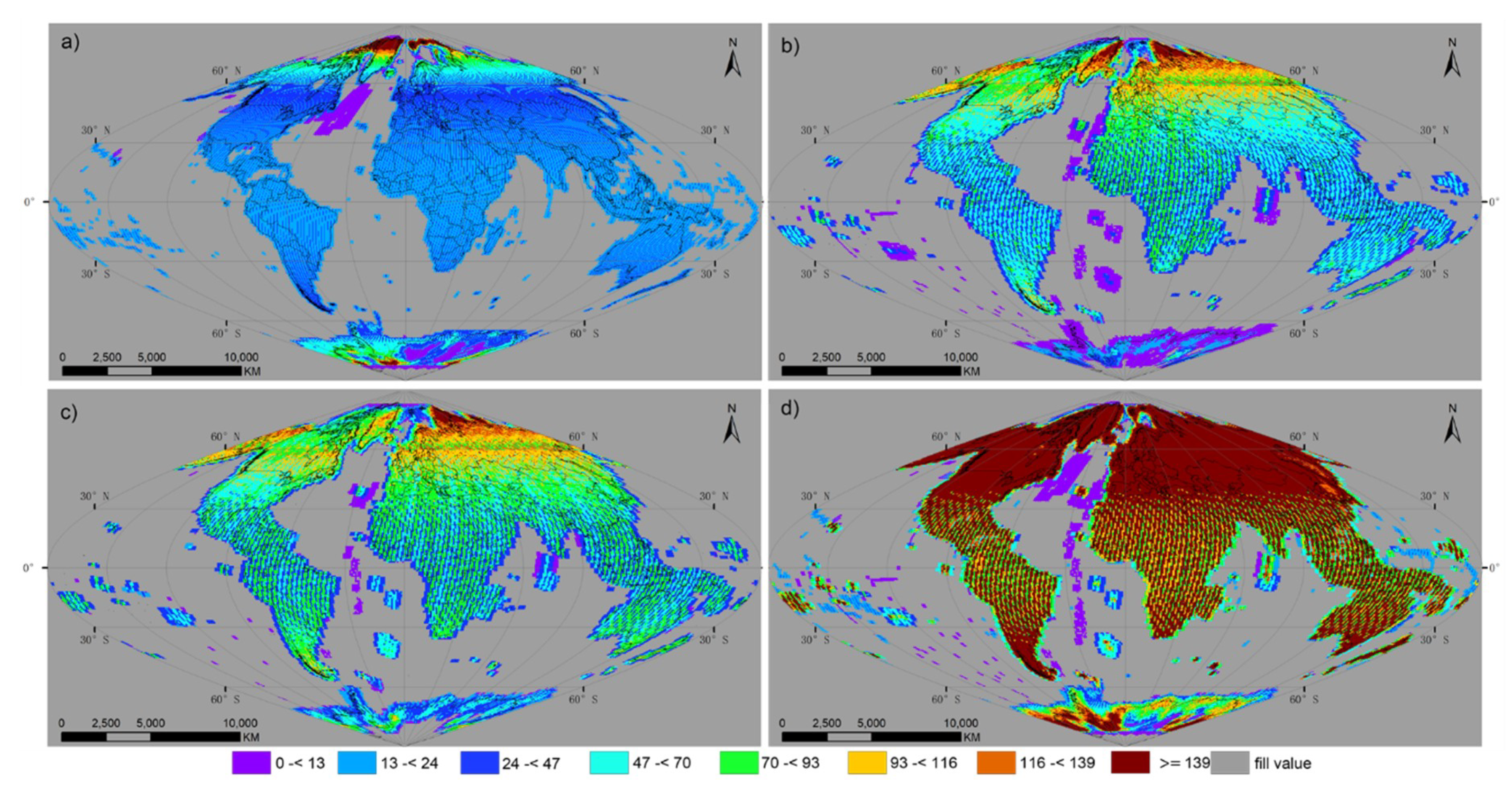
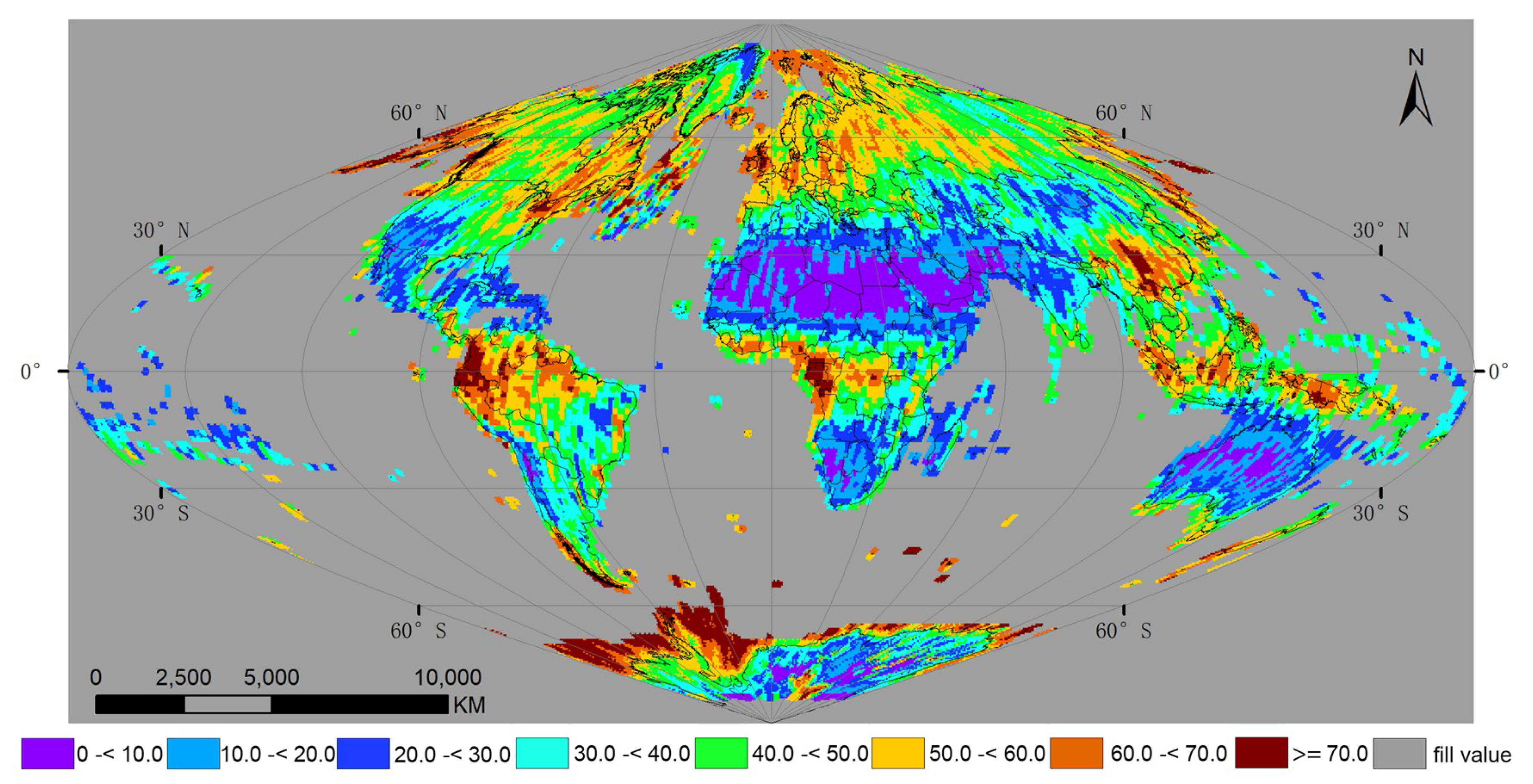
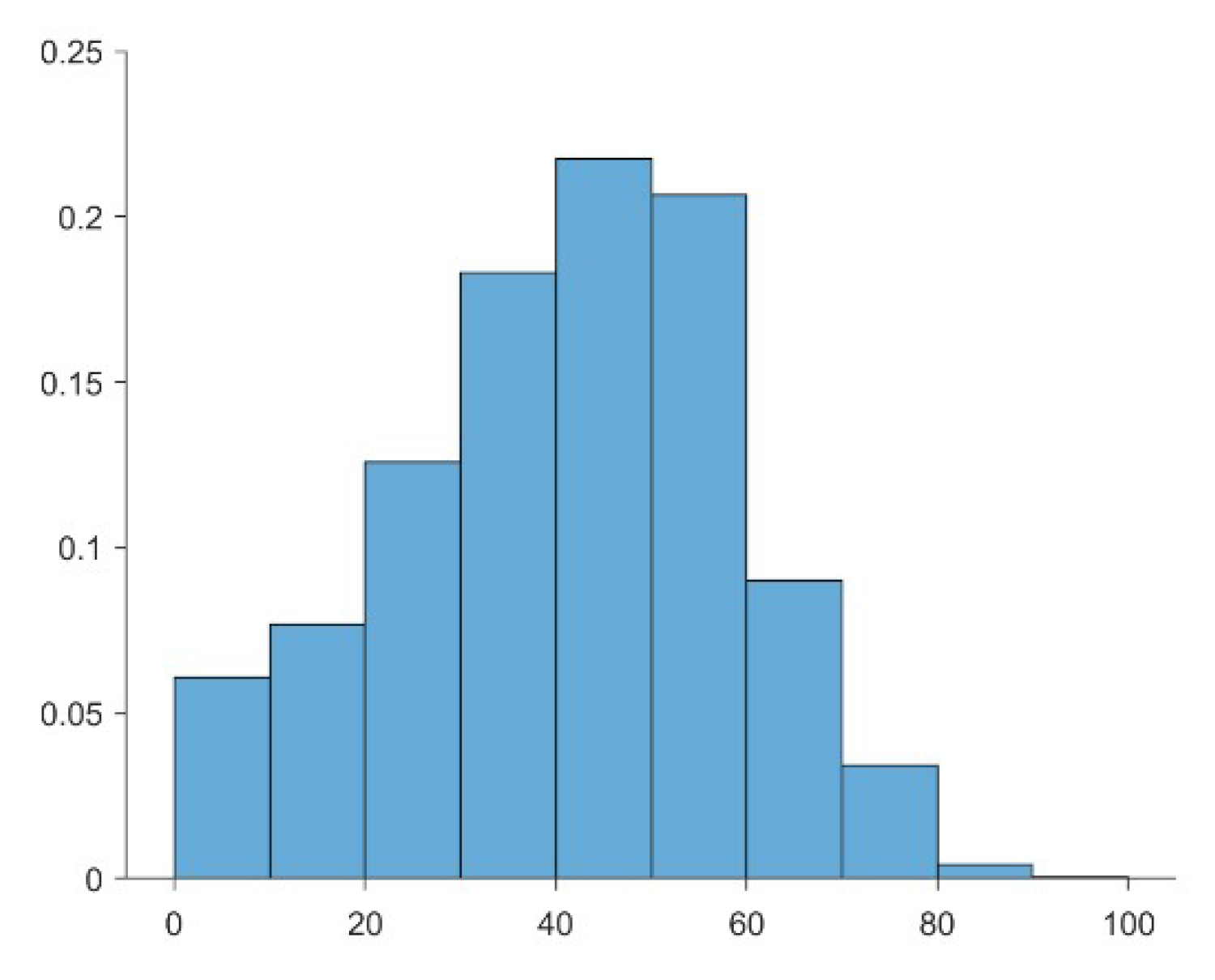
4.3. Global Cloud-Weighted Number of Observations for Landsat-8 and Sentinel-2A -2B
4.4. Comparison of Cloud-Weighted Number of Observations over Three Selected Locations for the Year 2018
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering open science and applications through continuity. Remote Sens. Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.M.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef] [Green Version]
- Kovalskyy, V.; Roy, D.P. The global availability of Landsat 5 TM and Landsat 7 ETM+ land surface observations and implications for global 30m Landsat data product generation. Remote Sens. Environ. 2013, 130, 280–293. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Roy, D. Landsat 5 Thematic Mapper reflectance and NDVI 27-year time series inconsistencies due to satellite orbit change. Remote Sens. Environ. 2016, 186, 217–233. [Google Scholar] [CrossRef] [Green Version]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.A.; White, J.C.; Loveland, T.R.; Woodcock, C.E.; Belward, A.S.; Cohen, W.B.; Fosnight, E.A.; Shaw, J.; Masek, J.G.; Roy, D.P. The global Landsat archive: Status, consolidation, and direction. Remote Sens. Environ. 2016, 185, 271–283. [Google Scholar] [CrossRef] [Green Version]
- Tolnai, M.; Nagy, J.G.; Bakó, G. Spatiotemporal distribution of Landsat imagery of Europe using cloud cover-weighted metadata. J. Maps 2015, 12, 1084–1088. [Google Scholar] [CrossRef] [Green Version]
- Sano, E.E.; Ferreira, L.G.; Asner, G.P.; Steinke, E.T. Spatial and temporal probabilities of obtaining cloud-free Landsat images over the Brazilian tropical savanna. Int. J. Remote Sens. 2007, 28, 2739–2752. [Google Scholar] [CrossRef]
- Kessler, P.D.; Killough, B.D.; Gowda, S.; Williams, B.R.; Chander, G.; Qu, M. CEOS Visualization Environment (COVE) Tool for Intercalibration of Satellite Instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1081–1087. [Google Scholar] [CrossRef]
- WWW1, Landsat Metadata. Available online: http://landsat.usgs.gov/consumer.php (accessed on 8 June 2019).
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat Data Continuity Mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef] [Green Version]
- Markham, B.; Jenstrom, D.; Masek, J.G.; Dabney, P.; Pedelty, J.A.; Barsi, J.A.; Montanaro, M. Landsat 9: Status and plans. In Earth Observing Systems XXI; International Society for Optics and Photonics: San Diego, CA, USA, 2016; Volume 9972, p. 99720G. [Google Scholar]
- USGS. U.S. Geological Survey, Landsat 9 Mission. 2018. Available online: https://landsat.usgs.gov/landsat-9-mission (accessed on 4 September 2018).
- Sentinel-2 User Handbook, ESA Standard Document. Available online: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 12 April 2019).
- Dwyer, J.L.; Roy, D.P.; Sauer, B.; Jenkerson, C.; Zhang, H.K.; Lymburner, L. Analysis Ready Data: Enabling Analysis of the Landsat Archive. Remote Sens. 2018, 109, 1363. [Google Scholar] [CrossRef]
- USGS. Landsat Collection-1 Product Definition. 2019. Available online: https://www.usgs.gov/media/files/landsat-collection-1-level-1-product-definition (accessed on 12 April 2019).
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef] [Green Version]
- USGS. Earth Explorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 20 October 2020).
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L. Best practices for the reprojection and resampling of Sentinel-2 Multi Spectral Instrument Level 1C data. Remote Sens. Lett. 2016, 7, 1023–1032. [Google Scholar] [CrossRef]
- Burton-Johnson, A.; Black, M.; Fretwell, P.T.; Kaluza-Gilbert, J. An automated methodology for differentiating rock from snow, clouds and sea in Antarctica from Landsat 8 imagery: A new rock outcrop map and area estimation for the entire Antarctic continent. Cryosphere 2016, 10, 1665–1677. [Google Scholar] [CrossRef] [Green Version]
- Fahnestock, M.A.; Scambos, T.A.; Moon, T.; Gardner, A.S.; Haran, T.M.; Klinger, M. Rapid large-area mapping of ice flow using Landsat 8. Remote Sens. Environ. 2016, 185, 84–94. [Google Scholar] [CrossRef] [Green Version]
- Loveland, T.R.; Irons, J.R. Landsat 8: The plans, the reality, and the legacy. Remote Sens. Environ. 2016, 185, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.S.H.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef] [Green Version]
- Schott, J.R.; Gerace, A.; Woodcock, C.E.; Wang, S.; Zhu, Z.; Wynne, R.H.; Blinn, C.E. The impact of improved signal-to-noise ratios on algorithm performance: Case studies for Landsat class instruments. Remote Sens. Environ. 2016, 185, 37–45. [Google Scholar] [CrossRef] [Green Version]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef] [PubMed]
- Snyder, J.P. Flattening the Earth: Two Thousand Years of Map Projections; The University of Chicago Press: Chicago, IL, USA, 1993. [Google Scholar]
- Storey, J.; Choate, M.J.; Lee, K. Landsat 8 Operational Land Imager On-Orbit Geometric Calibration and Performance. Remote Sens. 2014, 6, 11127–11152. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.K.; Roy, D.P.; Kovalskyy, V. Optimal Solar Geometry Definition for Global Long-Term Landsat Time-Series Bidirectional Reflectance Normalization. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1410–1418. [Google Scholar] [CrossRef]
- O’Rourke, J. Computational Geometry in C; Cambridge University Press (CUP): Cambridge, UK, 1998. [Google Scholar]
- Egorov, A.V.; Roy, D.P.; Zhang, H.K.; Li, Z.; Yan, L.; Huang, H. Landsat 4, 5 and 7 (1982 to 2017) Analysis Ready Data (ARD) Observation Coverage over the Conterminous United States and Implications for Terrestrial Monitoring. Remote Sens. 2019, 11, 447. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Goward, S.N.; Masek, J.G.; Thomas, N.; Zhu, Z.; Vogelmann, J.E. An automated approach for reconstructing recent forest disturbance history using dense Landsat time series stacks. Remote Sens. Environ. 2010, 114, 183–198. [Google Scholar] [CrossRef]
- Holden, C.E.; Woodcock, C.E. An analysis of Landsat 7 and Landsat 8 underflight data and the implications for time series investigations. Remote Sens. Environ. 2016, 185, 16–36. [Google Scholar] [CrossRef] [Green Version]
- Yuan, F.; Sawaya, K.E.; Loeffelholz, B.C.; Bauer, M.E. Land cover classification and change analysis of the Twin Cities (Minnesota) Metropolitan Area by multitemporal Landsat remote sensing. Remote Sens. Environ. 2005, 98, 317–328. [Google Scholar] [CrossRef]
- Zhu, Z. Change detection using landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Griffiths, P.; Van Der Linden, S.; Kuemmerle, T.; Hostert, P. A Pixel-Based Landsat Compositing Algorithm for Large Area Land Cover Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2088–2101. [Google Scholar] [CrossRef]
- Roy, D.P.; Ju, J.; Kline, K.; Scaramuzza, P.L.; Kovalskyy, V.; Hansen, M.; Loveland, T.R.; Vermote, E.; Zhang, C. Web-enabled Landsat Data (WELD): Landsat ETM+ composited mosaics of the conterminous United States. Remote Sens. Environ. 2010, 114, 35–49. [Google Scholar] [CrossRef]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Chaves, M.E.D.; Picoli, M.C.A.; Sanches, I.D. Recent Applications of Landsat 8/OLI and Sentinel-2/MSI for Land Use and Land Cover Mapping: A Systematic Review. Remote Sens. 2020, 12, 3062. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Henebry, G.M.; Henebry, G.M. Development and evaluation of a new algorithm for detecting 30 m land surface phenology from VIIRS and HLS time series. ISPRS J. Photogramm. Remote Sens. 2020, 161, 37–51. [Google Scholar] [CrossRef]
- Villa, P.; Pinardi, M.; Bolpagni, R.; Gillier, J.-M.; Zinke, P.; Nedelcuţ, F.; Bresciani, M. Assessing macrophyte seasonal dynamics using dense time series of medium resolution satellite data. Remote Sens. Environ. 2018, 216, 230–244. [Google Scholar] [CrossRef]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Environ. Res. Lett. 2016, 11, 034008. [Google Scholar] [CrossRef]
- Semmens, K.A.; Anderson, M.C.; Kustas, W.P.; Gao, F.; Alfieri, J.G.; McKee, L.; Prueger, J.H.; Hain, C.R.; Cammalleri, C.; Yang, Y.; et al. Monitoring daily evapotranspiration over two California vineyards using Landsat 8 in a multi-sensor data fusion approach. Remote Sens. Environ. 2016, 185, 155–170. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Landsat-8 Landsat-9 | Sentinel-2A Sentinel-2B | Landsat-8 Landsat-9 Sentinel-2A Sentinel-2B | |
|---|---|---|---|
| Mean Total | 6.042 | 3.795 | 2.277 |
| Median Total | 7.999 | 3.667 | 2.342 |
| Most Frequent Total Value | 8.000 (31.7%) | 5.000 (29.0%) | 3.076 (7.3%) |
| 2nd Most Frequent | 3.967 | 3.333 | 2.342 |
| Total Value | (13.3%) | (13.6%) | (4.2%) |
| 3rd Most Frequent | 3.999 | 2.486 | 1.525 |
| Total Value | (2.8%) | (0.2%) | (1.8%) |
| Location | Number of Observations | Number of Cloud-Weighted Observations | Number of Clear Views | Accuracy |
|---|---|---|---|---|
| Algeria (30.0° N, 0.0°) | 46 | 42.45 | 43 | 98.7% |
| Brazil (3.138° S, 62.180° W) | 23 | 9.81 | 9 | 91.0% |
| Sweden (56.842° N, 15.057° E) | 44 | 18.93 | 16 | 81.7% |
| Acquisition Date | Path | Row | Cloud Condition | Acquisition Date | Path | Row | Cloud Condition |
|---|---|---|---|---|---|---|---|
| 2018-01-01 | 196 | 39 | Clear | 2018-07-03 | 197 | 39 | Clear |
| 2018-01-08 | 197 | 39 | High confidence | 2018-07-12 | 196 | 39 | Clear |
| 2018-01-17 | 196 | 39 | Clear | 2018-07-19 | 197 | 39 | Clear |
| 2018-01-24 | 197 | 39 | Clear | 2018-07-28 | 196 | 39 | Clear |
| 2018-02-02 | 196 | 39 | High confidence | 2018-08-04 | 197 | 39 | Clear |
| 2018-02-09 | 197 | 39 | Clear | 2018-08-13 | 196 | 39 | Clear |
| 2018-02-18 | 196 | 39 | Clear | 2018-08-20 | 197 | 39 | Clear |
| 2018-02-25 | 197 | 39 | Clear | 2018-08-29 | 196 | 39 | Clear |
| 2018-03-06 | 196 | 39 | Clear | 2018-09-05 | 197 | 39 | Clear |
| 2018-03-13 | 197 | 39 | Clear | 2018-09-14 | 196 | 39 | Clear |
| 2018-03-22 | 196 | 39 | Clear | 2018-09-21 | 197 | 39 | Clear |
| 2018-03-29 | 197 | 39 | Clear | 2018-09-30 | 196 | 39 | Clear |
| 2018-04-07 | 196 | 39 | Clear | 2018-10-07 | 197 | 39 | High confidence |
| 2018-04-14 | 197 | 39 | Clear | 2018-10-16 | 196 | 39 | Clear |
| 2018-04-23 | 196 | 39 | Clear | 2018-10-23 | 197 | 39 | Clear |
| 2018-04-30 | 197 | 39 | Clear | 2018-11-01 | 196 | 39 | Clear |
| 2018-05-09 | 196 | 39 | Clear | 2018-11-08 | 197 | 39 | Clear |
| 2018-05-16 | 197 | 39 | Clear | 2018-11-17 | 196 | 39 | Clear |
| 2018-05-25 | 196 | 39 | Clear | 2018-11-24 | 197 | 39 | Clear |
| 2018-06-01 | 197 | 39 | Clear | 2018-12-03 | 196 | 39 | Clear |
| 2018-06-10 | 196 | 39 | Clear | 2018-12-10 | 197 | 39 | Clear |
| 2018-06-17 | 197 | 39 | Clear | 2018-12-19 | 196 | 39 | Clear |
| 2018-06-26 | 196 | 39 | Clear | 2018-12-26 | 197 | 39 | Clear |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Chen, B. Global Revisit Interval Analysis of Landsat-8 -9 and Sentinel-2A -2B Data for Terrestrial Monitoring. Sensors 2020, 20, 6631. https://doi.org/10.3390/s20226631
Li J, Chen B. Global Revisit Interval Analysis of Landsat-8 -9 and Sentinel-2A -2B Data for Terrestrial Monitoring. Sensors. 2020; 20(22):6631. https://doi.org/10.3390/s20226631
Chicago/Turabian StyleLi, Jian, and Baozhang Chen. 2020. "Global Revisit Interval Analysis of Landsat-8 -9 and Sentinel-2A -2B Data for Terrestrial Monitoring" Sensors 20, no. 22: 6631. https://doi.org/10.3390/s20226631