Ka Band Holographic Imaging System Based on Linear Frequency Modulation Radar


Abstract
1. Introduction
2. A Brief Description of the GHI-LFM Algorithm
3. In-house Prototype System
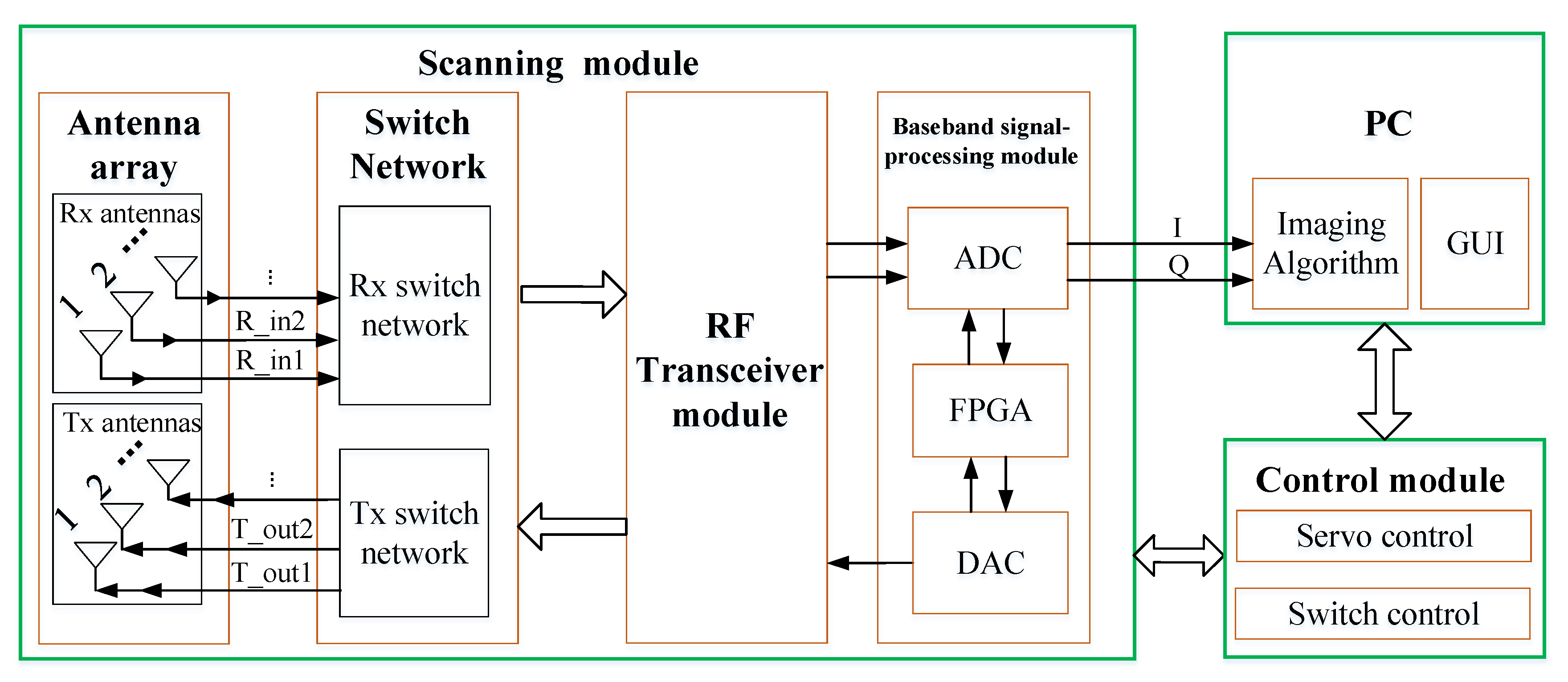
3.1. System Framework
3.2. Transceiver Antenna Array
3.3. RF Switch Network
3.4. RF Transceiver Module
3.5. Baseband Signal-Processing Module
3.6. In-House Developed Prototype
4. System Calibration
5. Test Result and Discussion
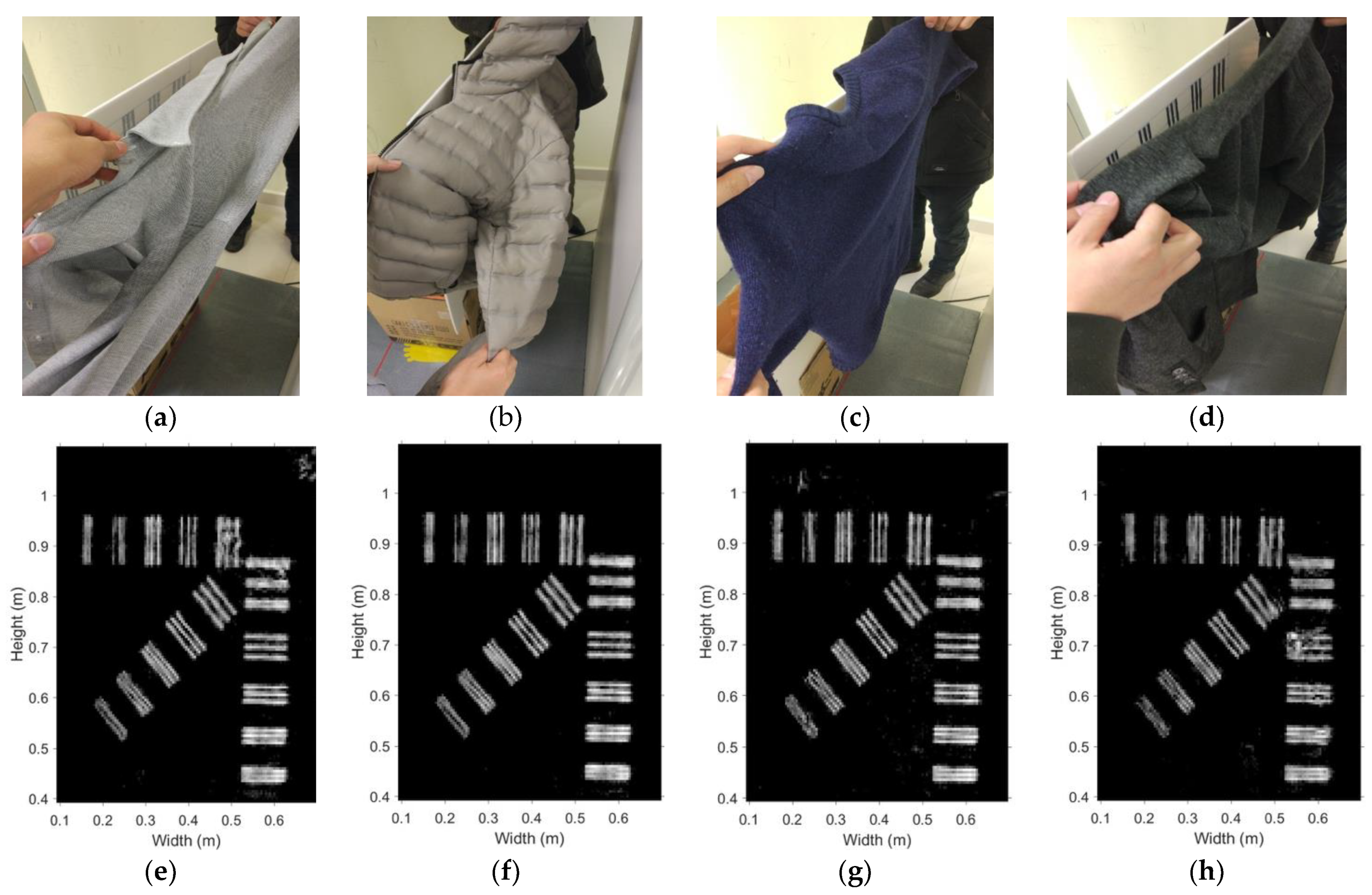
5.1. Spatial Resolution
5.2. Spatial Sensitivity
5.3. Tests with Emulated Contraband Samples
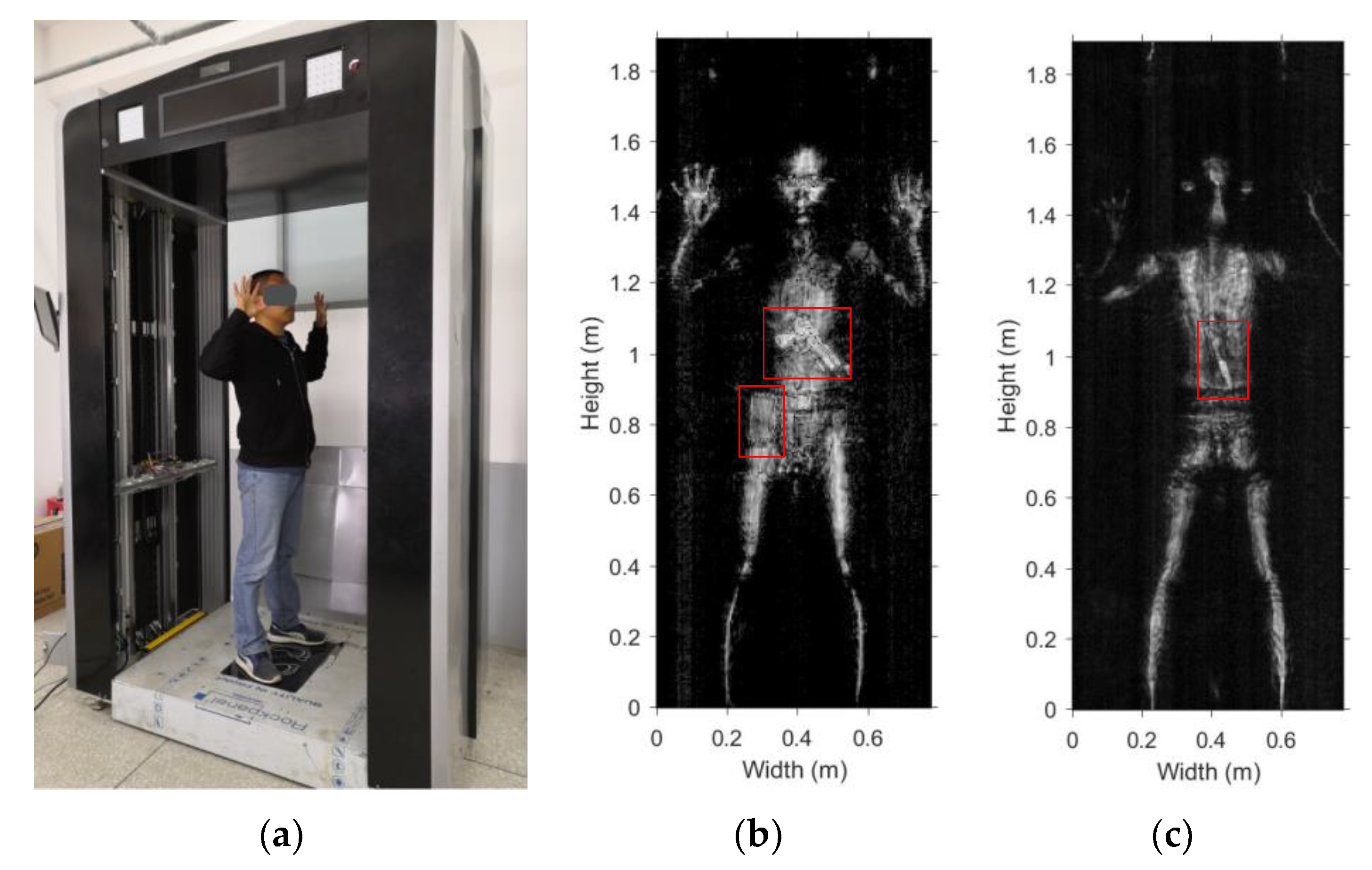
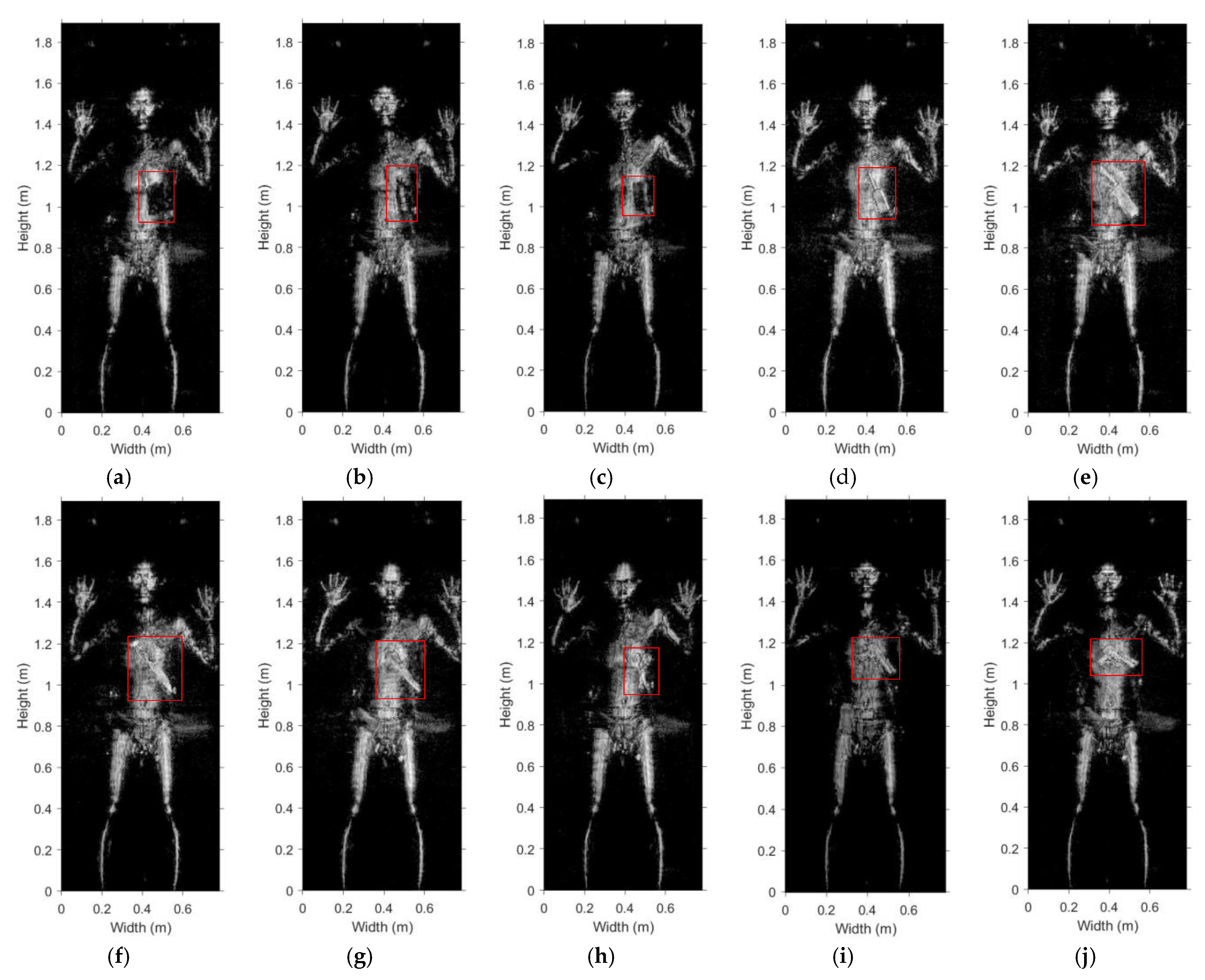
5.4. Screening of Volunteers with Hidden Contraband Samples
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Huddy, L.; Feldman, S.; Capelos, T.; Provost, C. The consequences of terrorism-disentangling the effects of personal and national threat. Political Psychol. 2002, 23, 485–509. [Google Scholar] [CrossRef]
- National Commission on Terrorist Attacks Upon the United States. Available online: https://govinfo.library.unt.edu/911/report/911Report_Ch12.htm (accessed on 1 July 2020).
- The White House. National Strategy for Counterterrorism of the United States of America. Washington, DC. 2018. Available online: https://www.whitehouse.gov/wp-content/uploads/2018/10/NSCT.pdf (accessed on 1 July 2020).
- Liu, Y.; Cheng, J.; Chen, Z.; Xing, Y. Feasibility Study, Low-Cost Dual Energy CT for Security Inspection. In Proceedings of the 2009 IEEE Nuclear Science Symposium Conference Record, Orlando, FL, USA, 24 October–1 November 2009; pp. 880–882. [Google Scholar]
- Zentai, G. X-ray imaging for homeland security. In Proceedings of the IEEE International Workshop on Imaging Systems and Techniques–IST 2008, Crete, Greece, 10–12 September 2008. [Google Scholar]
- Agurto, A.; Li, Y.; Tian, G.Y.; Bowring, N.; Lockwood, S. A review of concealed weapon detection and research in perspective. In Proceedings of the 2007 IEEE International Conference on Networking, Sensing and Control, London, UK, 15–17 April 2007; pp. 443–448. [Google Scholar]
- Olapiriyakul, S.; Das, S. Design and analysis of a two-stage security screening and inspection system. J. Air Transp. Manag. 2007, 13, 67–74. [Google Scholar] [CrossRef]
- Walk-Through Metal Detectors for Use in Concealed Weapon and Contraband Detection. U.S. Department of Justice, Office of Justice Programs, National Institute of Justice. Washington, DC 20531. Available online: https://www.ncjrs.gov/pdffiles1/nij/193510.pdf (accessed on 1 July 2020).
- Nikolova, N.; McCombe, J.J. On-body Concealed Weapon Detection System. U.S. Patent No. 10,229,328, 12 March 2019. Available online: https://patentimages.storage.googleapis.com/0f/d5/1e/a1a32e2f905ec5/US20150379356A1.pdf (accessed on 1 July 2020).
- Kruse, P.W.; Skatrud, D.D. Uncooled Infrared Imaging Arrays and Systems; Academic Press: San Diego, CA, USA, 1997. [Google Scholar]
- Appleby, R.; Wallace, H.B. Standoff detection of weapons and contraband in the 100GHz to 1 THz region. IEEE Trans. Antennas Propag. 2007, 55, 2944–2956. [Google Scholar] [CrossRef]
- Zhang, Y.; Deng, B.; Yang, Q.; Gao, J.; Qin, Y.; Wang, H. Near-field three-dimensional planar millimeter-wave holographic imaging by using frequency scaling algorithm. Sensors 2017, 17, 2438. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Chang, T.; Geng, G.; Jia, C.; Cui, H. A High Precision Terahertz Wave Image Reconstruction Algorithm. Sensors 2016, 16, 1139. [Google Scholar] [CrossRef] [PubMed]
- Meng, Q.; Xu, K.; Shen, F.; Zhang, B.; Ye, D.; Huangfu, J.; Li, C.; Ran, L. Microwave Imaging under Oblique Illumination. Sensors 2016, 16, 1046. [Google Scholar] [CrossRef] [PubMed]
- Sheen, D.M.; Jones, A.M.; Hall, T.E. Simulation of active cylindrical and planar millimeter-wave imaging systems. Proc. SPIE 2018, 10643, 1064308. [Google Scholar]
- Meng, Y.; Qing, A.; Lin, C.; Zang, J.; Zhao, Y.; Zhang, C. Passive millimeter wave imaging system based on helical scanning. Sci. Rep. 2018, 8, 7852. [Google Scholar] [CrossRef] [PubMed]
- Ma, Q.; Chung, H.; Rebeiz, G.M. A 4-channel 10–40 GHz wideband receiver with integrated frequency quadrupler for high resolution millimeter-wave imaging systems. In Proceedings of the 2018 IEEE/MTT-S International Microwave Symposium, IMS 2018, Philadelphia, PA, USA, 10–15 June 2018; pp. 883–886. [Google Scholar]
- Li, S.; Zhao, G.; Sun, H.; Amin, M. Compressive sensing imaging of 3-D object by a holographic algorithm. IEEE Trans. Antennas Propag. 2018, 66, 7295–7304. [Google Scholar] [CrossRef]
- Sheen, D.M.; McMakin, D.L.; Collins, H.D.; Hall, T.E.; Severtaen, R.H. Concealed explosive detection on personnel using a wideband holographic millimeter-wave imaging system. Proc. SPIE 1996, 2775, 503–512. [Google Scholar]
- Gao, J.; Deng, B.; Qin, Y.; Wang, H.; Li, X. An efficient algorithm for MIMO cylindrical millimeter-wave holographic 3-D imaging. IEEE Trans. Microw. Theory Tech. 2018, 66, 5065–5074. [Google Scholar] [CrossRef]
- Sheen, D.M.; McMakin, D.L.; Hall, T.E. Three-dimensional millimeter-wave imaging for concealed weapon detection. IEEE Trans. Microw. Theory Tech. 2001, 49, 1581–1592. [Google Scholar] [CrossRef]
- Sheen, D.M.; McMakin, D.L.; Hall, T.E. Near-field three-dimensional radar imaging techniques and applications. Appl. Opt. 2010, 49, E83–E93. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, S.S.; Schiessl, A.; Schmidt, L.P. A novel fully electronic active real-time imager based on a planar multistatic sparse array. IEEE Trans. Microw. Theory Tech. 2011, 59, 3567–3576. [Google Scholar] [CrossRef]
- Meng, Y.; Lin, C.; Zang, J.; Qing, A.; Nikolova, N.K. General holographic imaging based on linear frequency modulation for millimeter wave personnel screening. IEEE Trans. Microw. Theory Tech. 2020, 68, 4694–4705. [Google Scholar] [CrossRef]
- Meng, Y.; Lin, C.; Zang, J.; Qing, A. MMW holographic imaging for security check. In Proceedings of the 2019 Asia-Pacific Microwave Conference (APMC), Singapore, 10–13 December 2019; pp. 569–571. [Google Scholar]
- M/A-COM Technology Solutions Inc. MA4AGSW5 Datasheet. Available online: https://cdn.macom.com/datasheets/MA4AGSW5.pdf (accessed on 1 July 2020).
- M/A-COM Technology Solutions Inc. MA4AGSW4 Datasheet. Available online: https://cdn.macom.com/datasheets/MA4AGSW4.pdf (accessed on 1 July 2020).
- Sheen, D.M.; Hall, T.E. Calibration, reconstruction, and rendering of cylindrical millimeter-wave image data. Proc. SPIE 2011, 8022, 80220H. [Google Scholar]
- Sheen, D.M.; Bernacki, B.E.; McMakin, D.L. Advanced millimeter-wave security portal imaging techniques. Proc. SPIE 2012, 8259, 82590G. [Google Scholar]
- Analog Devices, Inc. HMC1065LP4E Datasheet. Available online: https://www.mouser.ca/datasheet/2/609/hmc1065-1503787.pdf (accessed on 1 July 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Covers | Horizontal | Vertical | Oblique |
|---|---|---|---|
| Uncovered | 6 mm | 5 mm | 5 mm |
| Shirt | 6 mm | 6 mm | 5 mm |
| Down jacket | 6 mm | 5 mm | 5 mm |
| Sweater | 6 mm | 6 mm | 5 mm |
| Woolen coat | 7 mm | 6 mm | 5 mm |
| Uncovered | 6 mm | 5 mm | 5 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, Y.; Lin, C.; Zang, J.; Qing, A.; Nikolova, N.K. Ka Band Holographic Imaging System Based on Linear Frequency Modulation Radar. Sensors 2020, 20, 6527. https://doi.org/10.3390/s20226527
Meng Y, Lin C, Zang J, Qing A, Nikolova NK. Ka Band Holographic Imaging System Based on Linear Frequency Modulation Radar. Sensors. 2020; 20(22):6527. https://doi.org/10.3390/s20226527
Chicago/Turabian StyleMeng, Yang, Chuan Lin, Jiefeng Zang, Anyong Qing, and Natalia K. Nikolova. 2020. "Ka Band Holographic Imaging System Based on Linear Frequency Modulation Radar" Sensors 20, no. 22: 6527. https://doi.org/10.3390/s20226527
APA StyleMeng, Y., Lin, C., Zang, J., Qing, A., & Nikolova, N. K. (2020). Ka Band Holographic Imaging System Based on Linear Frequency Modulation Radar. Sensors, 20(22), 6527. https://doi.org/10.3390/s20226527