Addressed Fiber Bragg Structures in Load-Sensing Wheel Hub Bearings

 ,
,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Load-Sensing Bearings in Automotive Applications
3. AFBS Interrogation Principle
4. Modeling of Vehicle Dynamics
5. Modeling of Bearing Outer Ring Deformation
6. Modeling of AFBS Interrogation
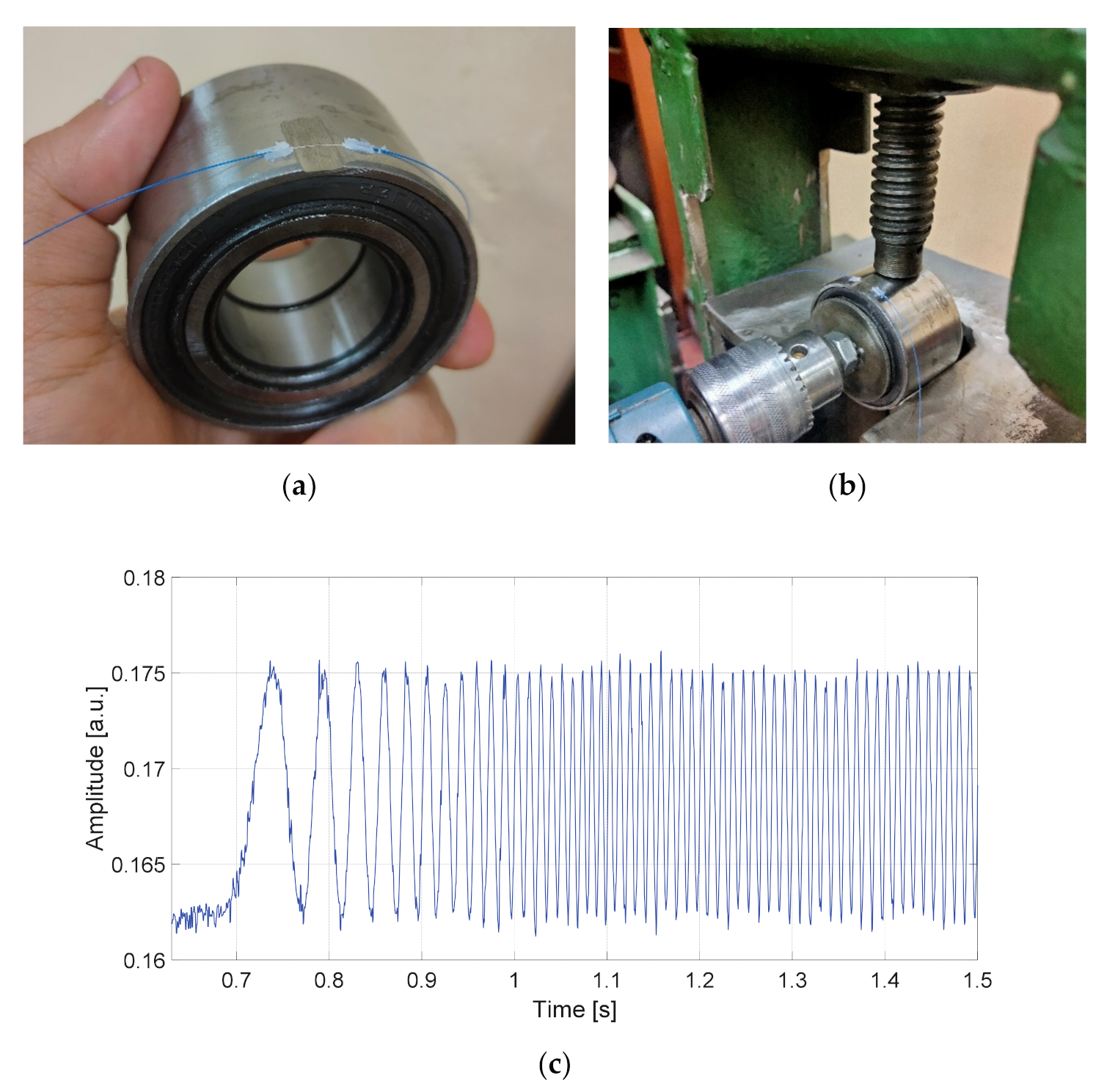
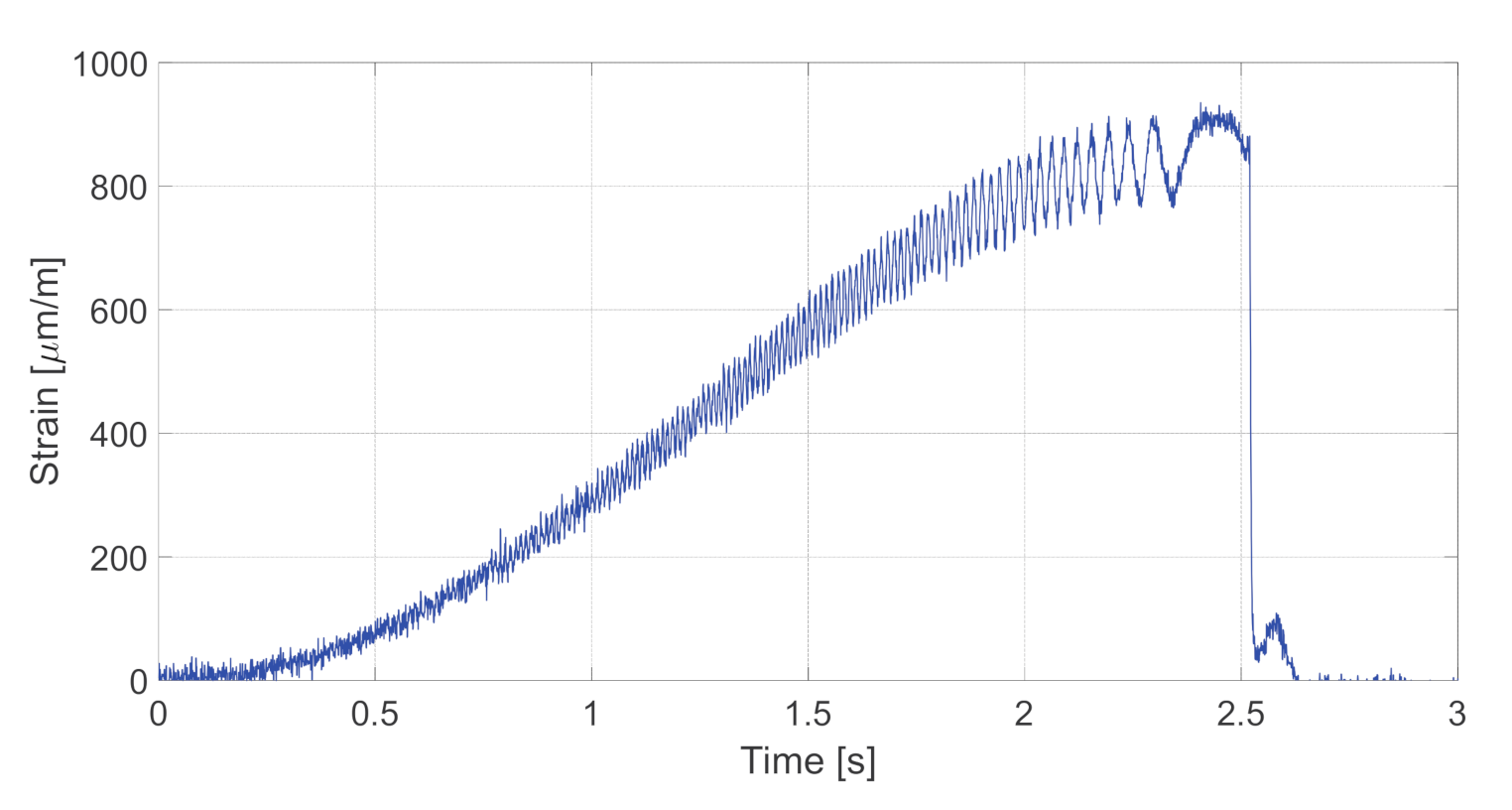
7. Experimental Results
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pretagostini, F.; Ferranti, L.; Berardo, G.; Ivanov, V.; Shyrokau, B. Survey on Wheel Slip Control Design Strategies, Evaluation and Application to Antilock Braking Systems. IEEE Access 2020, 8, 10951–10970. [Google Scholar] [CrossRef]
- Aksjonov, A.; Augsburg, K.; Vodovozov, V. Design and Simulation of the Robust ABS and ESP Fuzzy Logic Controller on the Complex Braking Maneuvers. Appl. Sci. 2016, 6, 382. [Google Scholar] [CrossRef]
- Viehweger, M.; Vaseur, C.; Van Aalst, S.; Acosta, M.; Regolin, E.; Alatorre, A.; Desmet, W.; Naets, F.; Ivanov, V.; Ferrara, A.; et al. Vehicle State and Tyre Force Estimation: Demonstrations and Gudelines. Veh. Syst. Dyn. 2020, 232, 1883–1930. [Google Scholar] [CrossRef]
- Canudas-de-Wit, C.; Tsiotras, P.; Efstathios, V.; Michel, B.; Gissinger, G.L. Dynamic Friction Models for Road/Tire Longitudinal Interaction. Veh. Syst. Dyn. 2003, 39, 189–226. [Google Scholar] [CrossRef]
- Jousimaa, O.J.; Xiong, Y.; Niskanen, A.J.; Tuononen, A.J. Energy harvesting system for intelligent tyre sensors. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016. [Google Scholar] [CrossRef]
- Hopping, K.; Augsburg, K.; Buchner, F. Extending the HSRI tyre model for large inflation pressure changes. In Proceedings of the Engineering for a Changing World: 59th IWK, Technische Universität Ilmenau, Ilmenau, Germany, 11–15 September 2017. [Google Scholar]
- Vehicle Dynamics, Durability and Tire Testing. Kistler Group (2020). Available online: https://www.kistler.com/en/applications/automotive-research-test/vehicle-dynamics-durability/tire-testing/ (accessed on 24 August 2020).
- Coppo, F.; Pepe, G.; Roveri, N.; Carcaterra, A. A Multisensing Setup for the Intelligent Tire Monitoring. Sensors 2017, 17, 00576. [Google Scholar] [CrossRef] [PubMed]
- Carcaterra, A.; Roveri, N.; Gianluca, P. OPTYRE—A new technology for tire monitoring: Evidence of contact patch phenomena. Mech. Syst. Signal Process 2015, 66–67, 793–810. [Google Scholar] [CrossRef]
- Roveri, N.; Pepe, G.; Mezzani, F.; Carcaterra, A.; Culla, A.; Milana, S. OPTYRE—Real Time Estimation of Rolling Resistance for Intelligent Tyres. Sensors 2019, 19, 5119. [Google Scholar] [CrossRef]
- Xiong, Y.; Juhani, A. A multi-laser sensor system to measure rolling deformation for truck tyres. Veh. Perform. 2017, 3, 115–126. [Google Scholar] [CrossRef]
- Xiong, Y.; Juhani, A. Rolling deformation of truck tires: Measurement and analysis using a tire sensing approach. J. Terramechanics 2015, 61, 33–42. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Hiraoka, N.; Todoroki, A.; Mizutani, Y. Strain Monitoring and Applied Load Estimation for the Development of Intelligent Tires Using a Single Wireless CCD Camera. J. Solid Mech. Mater. Eng. 2012, 6, 935–949. [Google Scholar] [CrossRef]
- Mendoza-Petit, M.F.; Garcia-Pozuelo, D.; Olatunbosun, O.A. A Strain-Based Method to Estimate Tire Parameters for Intelligent Tires under Complex Maneuvering Operations. Sensors 2019, 19, 2973. [Google Scholar] [CrossRef] [PubMed]
- Mendoza-Petit, M.F.; Garcia-Pozuelo, D.; Díaz, V.; Olatunbosun, O.A. A Strain-Based Intelligent Tire to Detect Contact Patch Features for Complex Maneuvers. Sensors 2020, 20, 1750. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.B.; Taheri, S. Accelerometer Based Method for Tire Load and Slip Angle Estimation. Vibration 2019, 2, 11. [Google Scholar] [CrossRef]
- Suzuki, M.; Nakano, K.; Miyoshi, A.; Katagiri, A.; Kunii, M. Method for Sensing Tire Force in Three Directional Components and Vehicle Control Using This Method. SAE Tech. Paper 2007-01-0830 2007 2007. [Google Scholar] [CrossRef]
- Ohkubo, N.; Horiuchi, T.; Yamamoto, O.; Inagaki, H. Brake Torque Sensing for Enhancement of Vehicle Dynamics Control Systems. SAE Tech. Paper 2007-01-0867 2007. [Google Scholar] [CrossRef]
- Den Engelse, J. Estimation of the Lateral Force, Acting at the Tire Contact Patch of a Vehicle Wheel, Using a Hub Bearing Unit Instrumented with Strain Gauges and Eddy-current Sensors. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Kerst, S.; Shyrokau, B.; Holweg, E. Reconstruction of Wheel Forces Using an Intelligent Bearing. SAE Int. J. Passeng. Cars–Mech. Syst. 2016, 9, 196–203. [Google Scholar] [CrossRef]
- Nishikawa, K. Hub Bearing with Integrated Multi-axis Load Sensor. Tech. Rev. 2011, 79, 58–63. [Google Scholar]
- Kerst, S.; Shyrokau, B.; Holweg, E. A model-based approach for the estimation of bearing forces and moments using outer-ring deformation. IEEE Trans. Ind. Electron. 2019, 67, 461–470. [Google Scholar] [CrossRef]
- Gandhi, N. Load Estimation and Uncertainty Analysis Based on Strain Measurement: With Application to Load Sensing Bearing. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Sakhabutdinov., A.Z.; Agliullin, T.A.; Gubaidullin, R.R.; Morozov, O.G.; Ivanov, V.; Sakhabutdinov, A.Z.; Agliullin, T.A.; Gubaidullin, R.R.; Morozov, O.G.; Ivanov, V. Numerical Modeling of Microwave-Photonic Sensor System for Load Sensing Bearings. In Proceedings of the 2020 Wave Electronics and its Application in Information and Telecommunication Systems (WECONF), Saint-Petersburg, Russia, 1–5 June 2020. [Google Scholar] [CrossRef]
- Dincmen, E.; Güvenç, B.A.; Acarman, T. Extremum-Seeking Control of ABS Braking in Road Vehicles with Lateral Force Improvement. IEEE Trans. Control Syst. Technol. 2014, 22, 230–237. [Google Scholar] [CrossRef]
- Pacejka, H. Tire and Vehicle Dynamics, 3rd ed.; Butterworth-Heinemann: Oxford, UK, 2012; pp. 87–147. [Google Scholar]
- Sahabutdinov, A.Z.; Morozov, O.G.; Agliullin, T.A.; Gubaidullin, R.R.; Ivanov, V. Modeling of Spectrum Response of Addressed FBG-Structures in Load Sensing Bearings. In Proceedings of the 2020 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 19–20 March 2020. [Google Scholar] [CrossRef]
- Sakhabutdinov, A.Z.; Morozov, O.G.; Morozov, G.A. Universal Microwave Photonics Approach to Frequency-Coded Quantum Key Distribution. In Advanced Technologies of Quantum Key Distribution; Gnatyuk, S., Ed.; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- Morozov, O.; Sakhabutdinov, A.; Anfinogentov, V.; Misbakhov, R.; Kuznetsov, A.; Agliullin, T. Multi-Addressed Fiber Bragg Structures for Microwave-Photonic Sensor Systems. Sensors 2020, 20, 2693. [Google Scholar] [CrossRef]
- Gubaidullin, R.R.; Sahabutdinov, A.Z.; Agliullin, T.A.; Morozov, O.G.; Ivanov, V. Application of Addressed Fiber Bragg Structures for Measuring Tire Deformation. In Proceedings of the 2019 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Yaroslavl, Russia, 1–3 July 2019. [Google Scholar] [CrossRef]
- Gubaidullin, R.R.; Agliullin, T.A.; Nureev, I.I.; Sahabutdinov, A.Z.; Ivanov, V. Application of Gaussian Function for Modeling Two-Frequency Radiation from Addressed FBG. In Proceedings of the 2020 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 19–20 March 2020. [Google Scholar] [CrossRef]
- Agliullin, T.A.; Gubaidullin, R.R.; Ivanov, V.; Morozov, O.G.; Sakhabutdinov, A.Z. Addressed FBG-structures for tire strain measurement. In Proceedings of the SPIE 11146, Optical Technologies for Telecommunications 2018, Ufa, Russian Federation, 20–22 November 2018; p. 111461. [Google Scholar] [CrossRef]
- Morozov, O.G.; Sakhabutdinov, A.J. Addressed fiber Bragg structures in quasidistributed microwave-photonic sensor systems. Comput. Opt. 2019, 43, 535–543. [Google Scholar] [CrossRef]
- Morozov, O.G.; Sakhabutdinov, A.Z.; Nureev, I.I.; Misbakhov, R.S. Modelling and record technologies of address fibre Bragg structures based on gratings with two symmetrical pi-phase shifts. J. Phys. Conf. Ser. 2019, 1368, 022048. [Google Scholar] [CrossRef]
- Gubaidullin, R.R.; Agliullin, T.A.; Morozov, O.G.; Sahabutdinov, A.Z.; Ivanov, V. Microwave-Photonic Sensory Tire Control System Based on FBG. In Proceedings of the 2019 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 20–21 March 2019. [Google Scholar] [CrossRef]
- Oswald, F.B.; Zaretsky, E.V.; Poplawski, J.V. Effect of Internal Clearance on Load Distribution and Life of Radially Loaded Ball and Roller Bearings. Tribol. Trans. 2012, 55, 245–265. [Google Scholar] [CrossRef]
- Sakhabutdinov, A.Z.; Nureev, I.I.; Morozov, O.G.; Kuznetsov, A.A.; Faskhutdinov, L.M.; Petrov, A.V.; Kuchev, S.M. Calibration of combined pressure and temperature sensors. Int. J. Appl. Eng. Res. 2015, 10, 44948–44957. [Google Scholar]
- Gupta, P.K.; Taketa, J.I.; Price, C.M. Thermal interactions in rolling bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 234, 1233–1253. [Google Scholar] [CrossRef]
- Kumaran, S.S.; Velmurugan, P.; Tilahun, S. Effect on stress and thermal analysis of tapered roller bearings. J. Crit. Rev. 2020, 7, 492–501. [Google Scholar] [CrossRef]
- Fajkus, M.; Nedoma, J.; Martinek, R.; Vasinek, V.; Nazeran, H.; Siska, P. A Non-Invasive Multichannel Hybrid Fiber-Optic Sensor System for Vital Sign Monitoring. Sensors 2017, 17, 111. [Google Scholar] [CrossRef]
- Lai, M.; Karalekas, D.; Botsis, J. On the Effects of the Lateral Strains on the Fiber Bragg Grating Response. Sensors 2013, 13, 2631–2644. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agliullin, T.; Gubaidullin, R.; Sakhabutdinov, A.; Morozov, O.; Kuznetsov, A.; Ivanov, V. Addressed Fiber Bragg Structures in Load-Sensing Wheel Hub Bearings. Sensors 2020, 20, 6191. https://doi.org/10.3390/s20216191
Agliullin T, Gubaidullin R, Sakhabutdinov A, Morozov O, Kuznetsov A, Ivanov V. Addressed Fiber Bragg Structures in Load-Sensing Wheel Hub Bearings. Sensors. 2020; 20(21):6191. https://doi.org/10.3390/s20216191
Chicago/Turabian StyleAgliullin, Timur, Robert Gubaidullin, Airat Sakhabutdinov, Oleg Morozov, Artem Kuznetsov, and Valentin Ivanov. 2020. "Addressed Fiber Bragg Structures in Load-Sensing Wheel Hub Bearings" Sensors 20, no. 21: 6191. https://doi.org/10.3390/s20216191
APA StyleAgliullin, T., Gubaidullin, R., Sakhabutdinov, A., Morozov, O., Kuznetsov, A., & Ivanov, V. (2020). Addressed Fiber Bragg Structures in Load-Sensing Wheel Hub Bearings. Sensors, 20(21), 6191. https://doi.org/10.3390/s20216191