2.1. Real Time Localized Strain (RTLS) Measurements
FBGs are sensitive to strain and temperature and have been used for many years [
1,
2,
3]. The process for manufacturing the gauge is to write a periodic index change into a single mode fiber which can be done uniformly or non-uniformly [
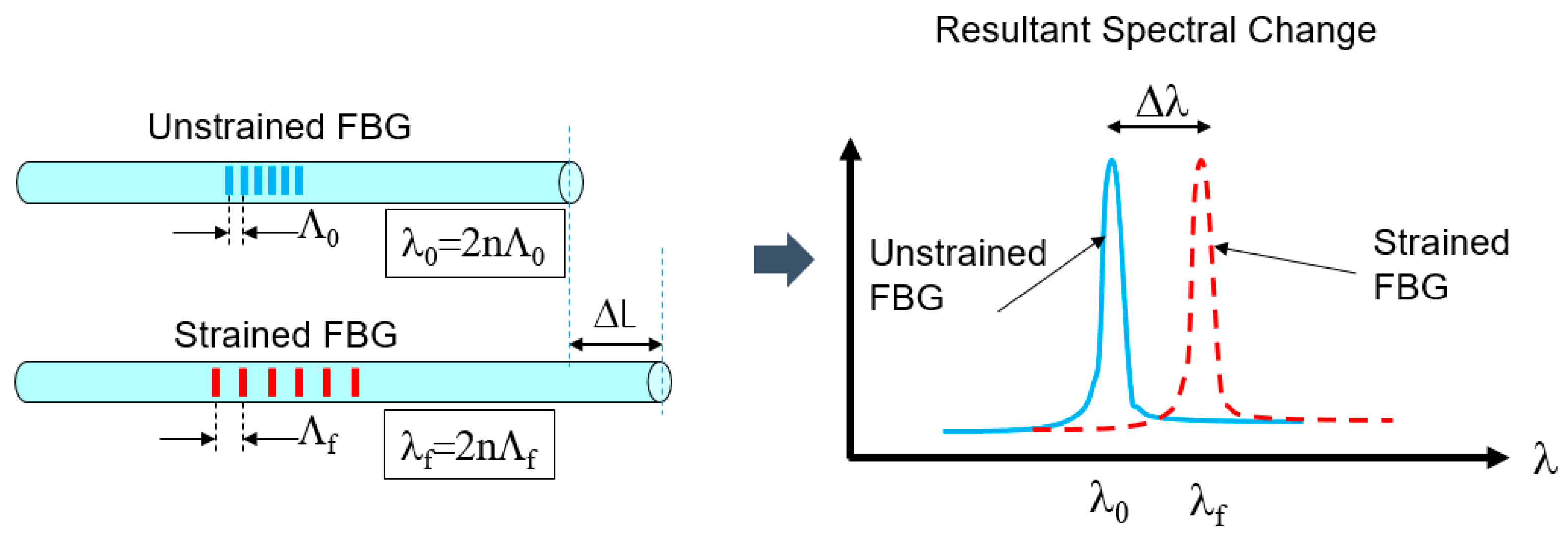
20]. The index change periodicity determines the reflected wavelength, λ, through the relation λ = 2nΛ, where Λ is the periodicity, and n is the refractive index of the fiber. By stretching or compressing the fiber, the grating periodicity increases or decreases proportionally, thereby changing the reflected wavelength linearly with the change in length.
Figure 4 shows a schematic of this.
Once the wavelength changes, the strain and temperature change can be calculated from the equation:
In Equation (1), Δλ is the wavelength change, λ is the center wavelength of the gauge, k is the so called “k-factor” which is 1-p, where p is the strain-optic coefficient for the fiber and is typically ~0.21 for the optical fiber used in our experiments, αΛ is the thermal expansion coefficient of the fiber, and αn is the thermo-optic coefficient. For our fast dynamic experiments, ΔT changes very slowly in comparison and is basically zero. This means the majority of our wavelength change comes from the force induced strain in the vessel. The strain, ε, in Equation (1) is the standard value of ΔL/L.
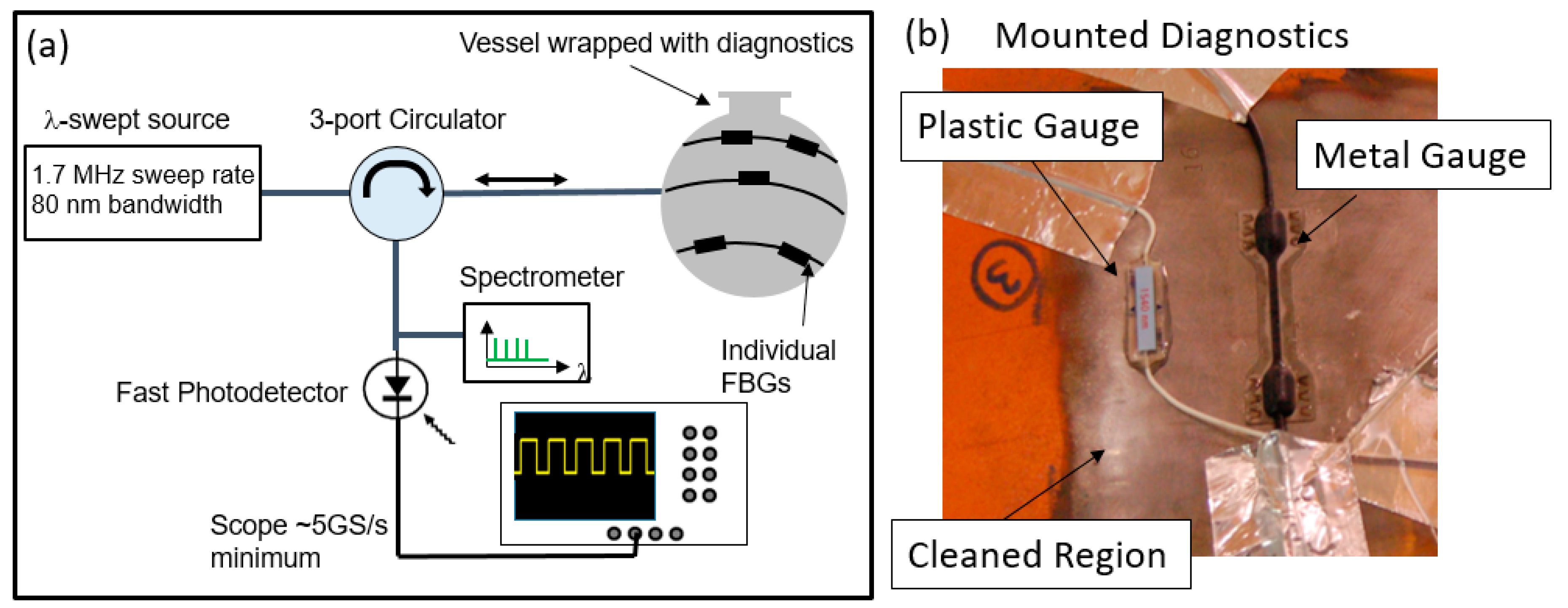
The method for measuring the strain on a vessel is the real-time localized strain (RTLS) system. A block diagram of the technique is shown in
Figure 5a. The RTLS technique is presented as an alternative for resistive strain gauges. The remainder of the paper following this section will be alternative methods for verifying the response of the optical method.
The light source used was an Optores Fourier domain mode-locked (FDML) laser [
21,
22]. The model used in our experiments had a sweep rate of ~1.7 MHz and a bandwidth of 80 nm centered at 1550 nm. The linewidth of the source is less than 30 picometers and the average power is ~100 mW. The laser also provides a clock signal synched to the start of sweep. The model we use creates 3 identical copies of the sweep, which are consecutively delayed and superimposed to give 4 replicas of each sweep with each start-of-sweep of the laser. This means the clock signal frequency, while synched to the start of sweep, is actually a quarter of the frequency of sweeps that the laser provides. This has to be taken into consideration for the data analysis. Finally, the stability of the laser was measured to be less than 180 ps after 10,000 sweeps, which is much less than the 2.36 microsecond sweep period of the laser. This stability result is also dominated by the trigger jitter of the detector so the laser stability may be even better than this.
The output from the laser is sent to a 3 port circulator and directed to a chain of FBG strain sensors placed on the device under test (DUT), which in this case is a confinement vessel. Each sensor reflects one particular wavelength which is then sent back to the circulator. Due to the sweeping nature of the laser, each gauge is interrogated at a unique time with respect to the start of sweep that does not change in a static measurement. The sequential series of reflections is then sent to a 99:1 splitter with 1% of the light sent to a spectrometer for calibration purposes. Each peak represents one gauge placed on the DUT. The remaining 99% of the light is sent to a fast photodetector, in this case, an Optilab PR-23-M 23 GHz optical detector. The output of the detector is recorded on a digital oscilloscope. In order to record fast temporal changes in the strain on the vessel, a 4 GHz scope capable of measuring up to 25 GS/s was used. The extended memory option allowing up to 125 M points per channel was also required and even with this, the sample rate had to be reduced to 12.5 GS/s in order to record for 10 ms. The high sample rate allows measurements to be made with a frequency limited by the sweep rate of the laser source. In this case, 1.6 MHz which is over 300 times more measurements per unit time than standard off-the-shelf spectrometer-based measurement techniques.
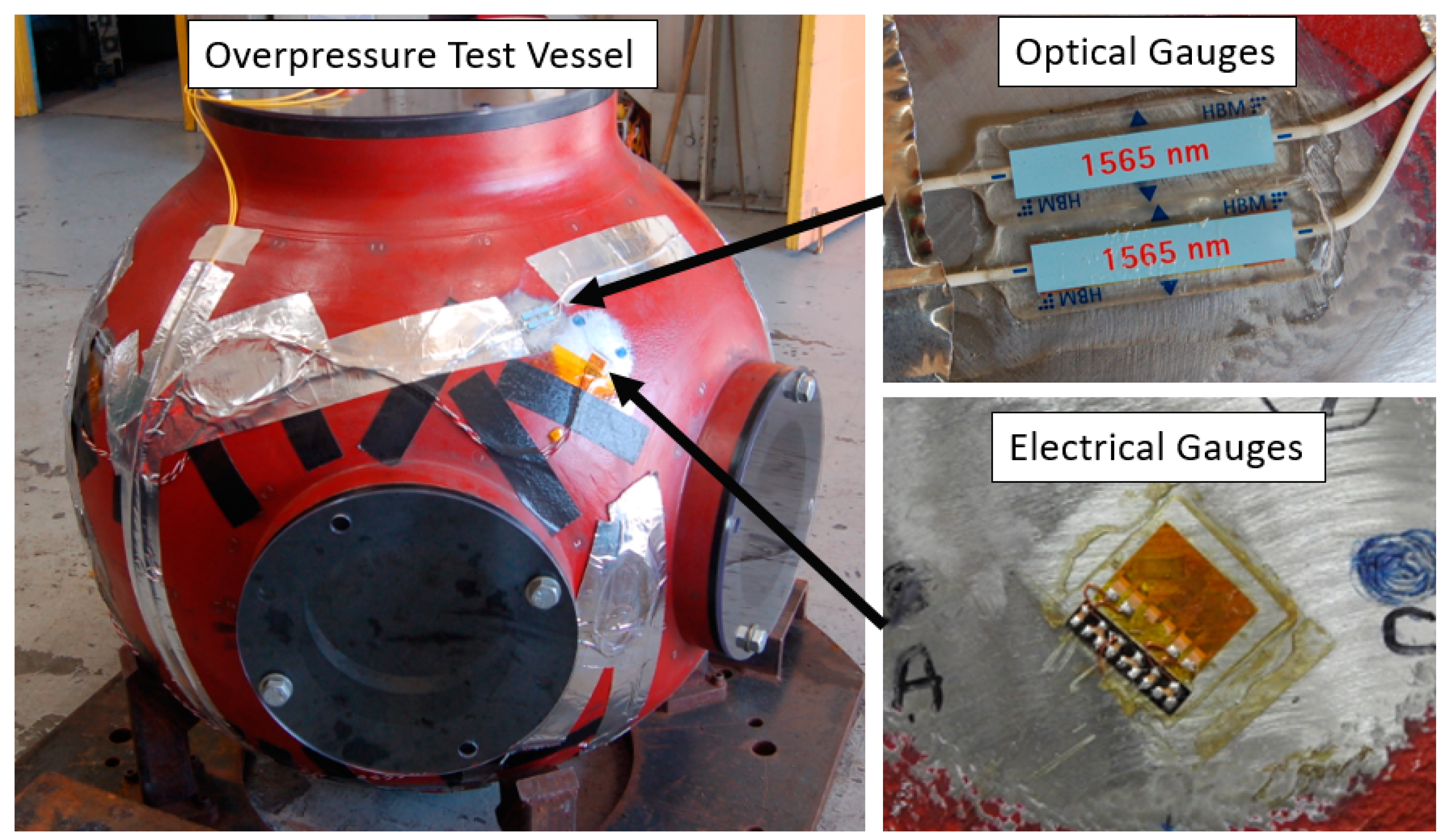
The chain of gauges used for the localized measurements is a custom configured design manufactured by HBM. The chain was chosen to include 8 wavelengths that fit within the bandwidth of our laser source. For our proof-of-concept experiments, we focused on one type of FBG chains. The gauge is a light weight plastic-encased FBG. The gauge is particularly flexible, which aids in the installation of the gauges on a curved surface. The gauges can be prepared with any amount of optical fiber between them, thereby allowing the gauges to be placed at any location and in any orientation on the contour of the vessel. To attach the gauges, we first had the vessel surface prepared by removing the paint with a grinder. The bare metal was then scuffed with 400 grit sandpaper. Next, the surface was cleaned with phosphoric acid followed by a neutralizer. Finally, the gauges were attached to the surface with a thin layer of two part 5 min epoxy. The gauges were held in place with a Teflon cushion until the epoxy was set. An image of the gauges attached to a sample vessel is shown in
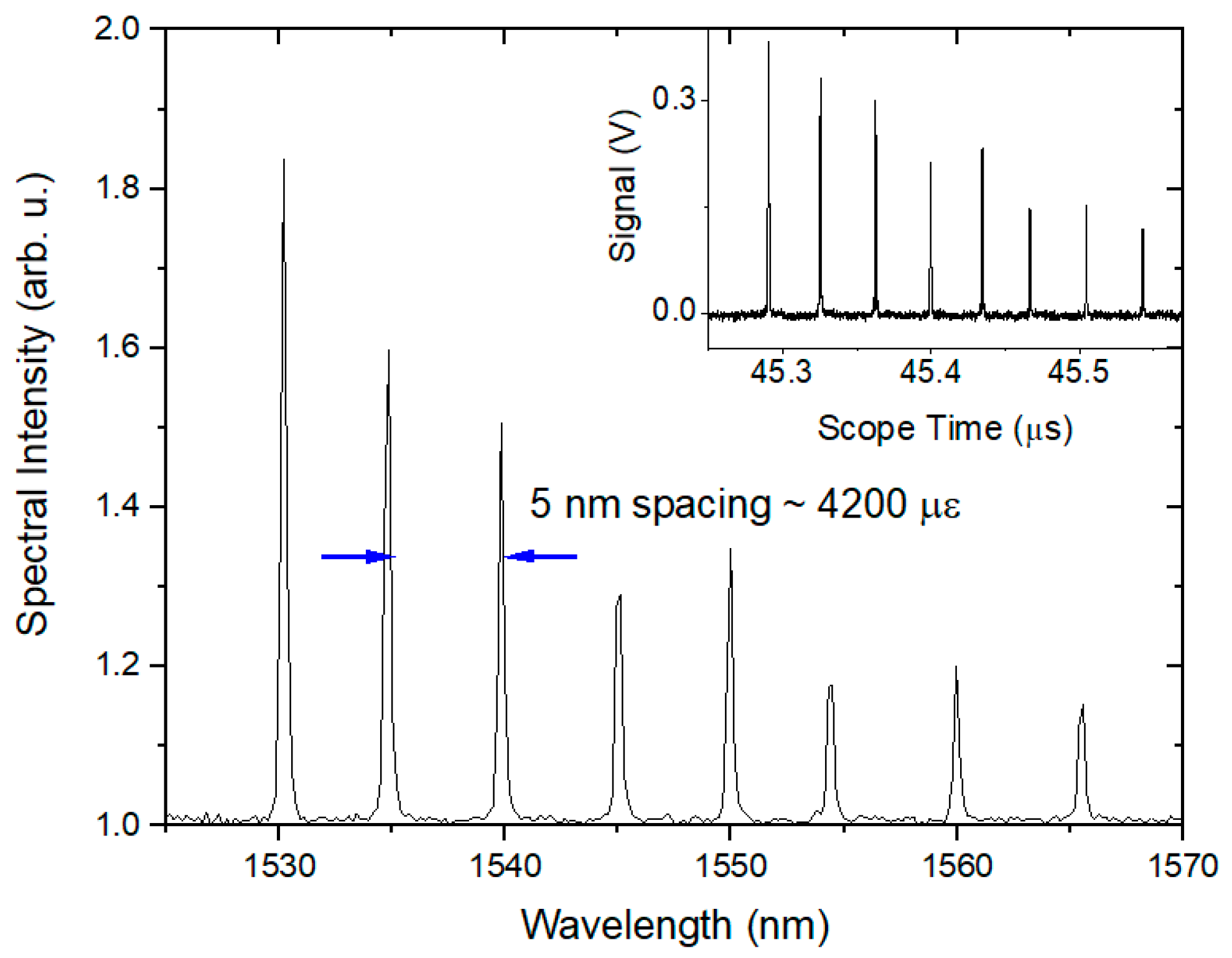
Figure 5b. The gauges employ a single mode fiber etched with a grating. The maximum strain measurable for both types of gauge is +/−10,000 µε and the peak reflectivity at the specified wavelength is 15%. The linewidth of a single FBG is specified at 0.13 nm and the FBG inside the gauge is 5 mm long. A sample spectrum for a series of 8 gratings is shown in
Figure 6a.
A second type of weldable FBG with a rugged rubberized coating on the fiber optic was also tested. Due to safety considerations, we were not able to weld the gauges to the containment vessel, so they were attached using the same epoxy method of the plastic gauges. Due to the increased mass of the weldable type, it was expected that they would have a larger chance of breaking through the epoxy that was adhering them to the surface at any time during the dynamic response of the vessel walls following the HE detonation. These gauges generally failed for these reasons.
The peak wavelengths were chosen to coincide with our laser source bandwidth. We also designed the chain with 5 nm separation between each peak wavelength, corresponding to over 4000 µε, which exceeds the peak strain often expected in the vessels. This helps ensure the peaks do not cross during the experiment for ease in data analysis.
To form an accurate measurement of the strain, the data must be first converted from the time axis as it is recorded on the scope to the spectral domain. The first step is to parse the data according to the start of each sweep. This is done by recording both the data and the clock signal during the experiment. The data shown in
Figure 6b,c show the raw data and the clock signal, respectively. The clock period is then extracted and divided by 4 since the laser source we use creates 4 sweeps for each clock pulse. Each raw data sweep is then extracted using the quarter clock period with the time of each start of sweep recorded. The time axis for each sweep is relabeled from t0 to N, where N is the total number of samples multiplied by the time step in a single sweep. In the case of our light source, we record ~7800 samples for each sweep. With a 12.5 GS/s sample rate, our time step is 80 ps, giving a total time window for each sweep of nearly 625 ns. Next, the new 0 to N time axis must be converted to wavelength. A sample calibration spectrum as seen in
Figure 6a is recorded shortly before each experiment. This is done as close to the experiment as possible to ensure the temperature of the vessel does not vary much from before to after the experiment. A set of thermocouples is also fielded on the vessel, which allow for independent verification of the temperature. From the sample spectrum, the peak of each gauge is found. A polynomial fit of the peak wavelengths versus the temporal point as recorded on the time axis of the scope is produced. This gives a fitting function that allows every temporal sweep of the laser to be converted into wavelength. Once this has been accomplished, a 2D array of each temporal sweep converted into wavelength and plotted against the start time of each sweep can be made. It should be noted that the spectrum shown in
Figure 6a has a very similar profile to the temporal representations shown in
Figure 6b, demonstrating that the spectral information is preserved in the measurement.
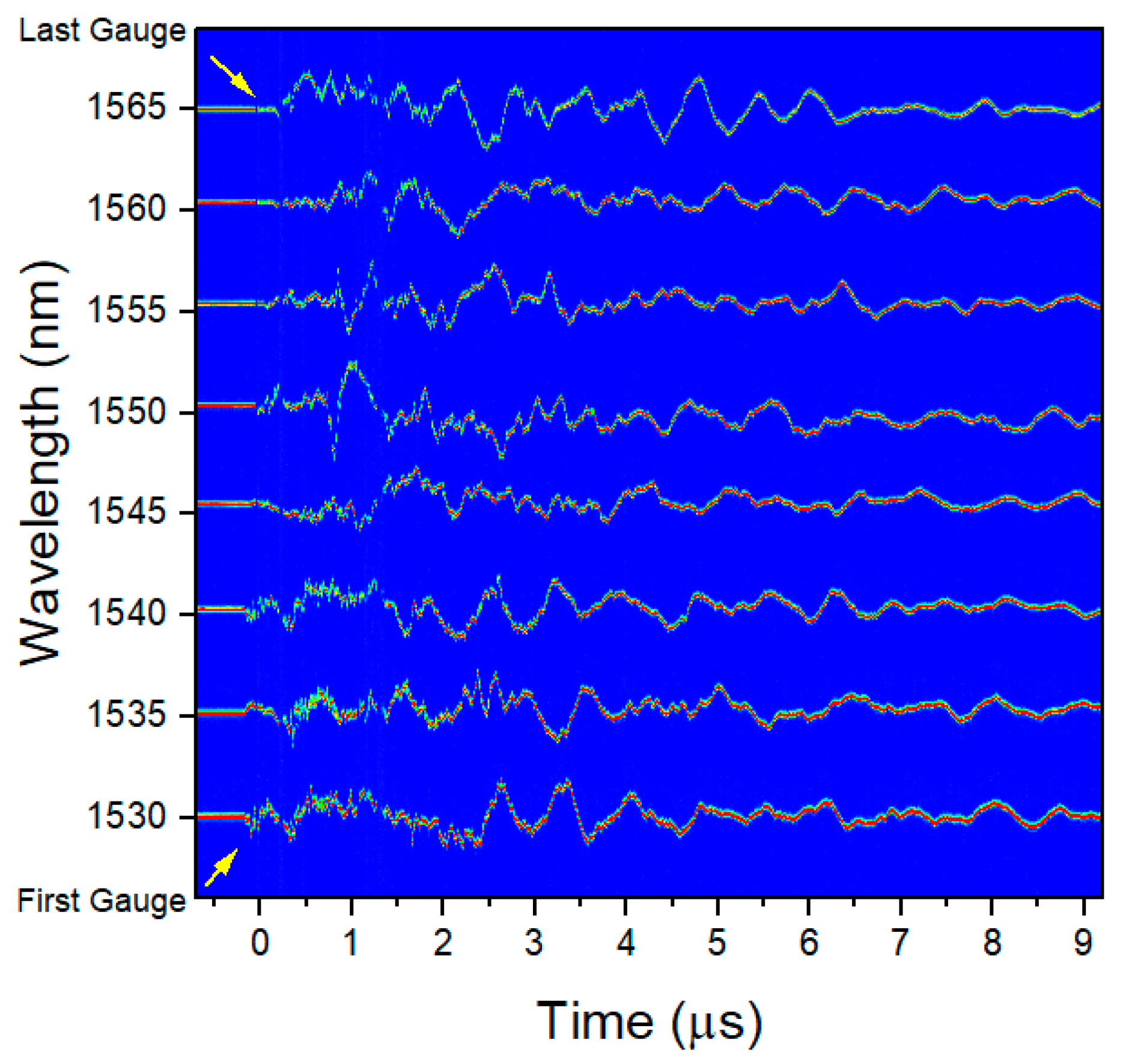
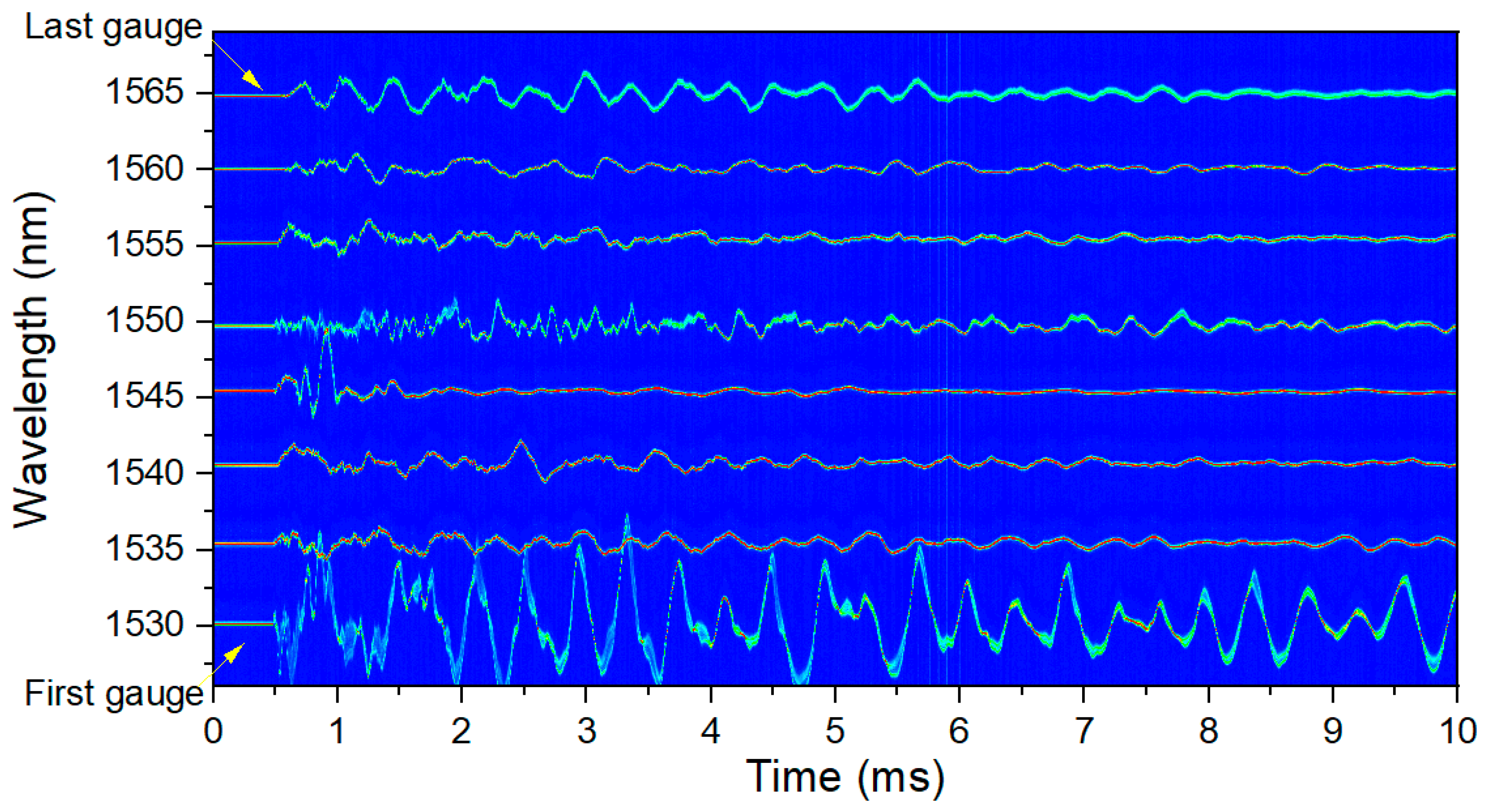
Figure 6d shows a sample 2D array plotted as an image with the intensity of each peak plotted as a color. Each separate line is the wavelength change for each gauge. From this point, extracting the wavelength change for each gauge and converting into the strain using Equation (1) is straightforward.
2.2. Global Plastic and Elastic Deformation of Vessels
The RTLS measurements can give an overview of the localized strain at various points on the vessel. The individual measurements only record for 10 ms however, and so plastic deformation in the vessel cannot be fully deduced from the RTLS measurements alone. To further characterize the vessel and complement the local transient measurements, two additional techniques are typically fielded. These additional diagnostics give insight into the global change, both statically and dynamically, by integrating the total strain along the circumference of the vessel.
The first is a simple technique using an optical backscatter reflectometer (OBR) with high resolution. The device we chose is a Luna OBR4600 [
23] which has an ultimate resolution of 10 µm. The Luna device is slow compared to the detonation event of the experiment with a single scan taking a few seconds, so we treat the measurements statically.
Figure 7a shows how the Luna device is employed for global measurements. First, the vessel is prepared by removing the paint and creating a surface in a manner similar to what was described for the RTLS method. Next, a fiber is attached with epoxy onto the vessel in a great circle around the vessel. A slight amount of tension is applied to the fiber during the epoxy application to ensure the fiber is tight around the vessel. A gold reflector is sometimes attached to the end of the fiber to increase the visibility of the location of the end of the fiber, although this is not really necessary due to the large dynamic range of an off-the-shelf OBR4600. From here, static measurements can be made of the fiber length that has been stretched around the vessel.
Figure 7b shows a sample Luna OBR4600 dataset.
The individual peaks represent locations of fiber connections with the final peak at 55 m being the end of the fiber. As the measurement is slow, several scans can be made to show any length changes in the vessel due to temperature changes all the way up to the experiment. Typically, we scan every 15 min for an hour before and after the experiment. The global change to the circumference of the vessel includes any plastic deformation as well as temperature changes due to the detonation event that occurred during the experiment. Length changes from temperature induced expansion must be considered in the analysis of the data using complementary thermocouples fielded on the outside and inside of the vessel. Further discussion of the temperature effect will be discussed in the results section. Additionally, a shorter piece of fiber optic was attached to the vessel. Since it is not a full circumference of the vessel, a scaled measurement of the length change can be measured and compared with the full length fiber around the total vessel circumference.
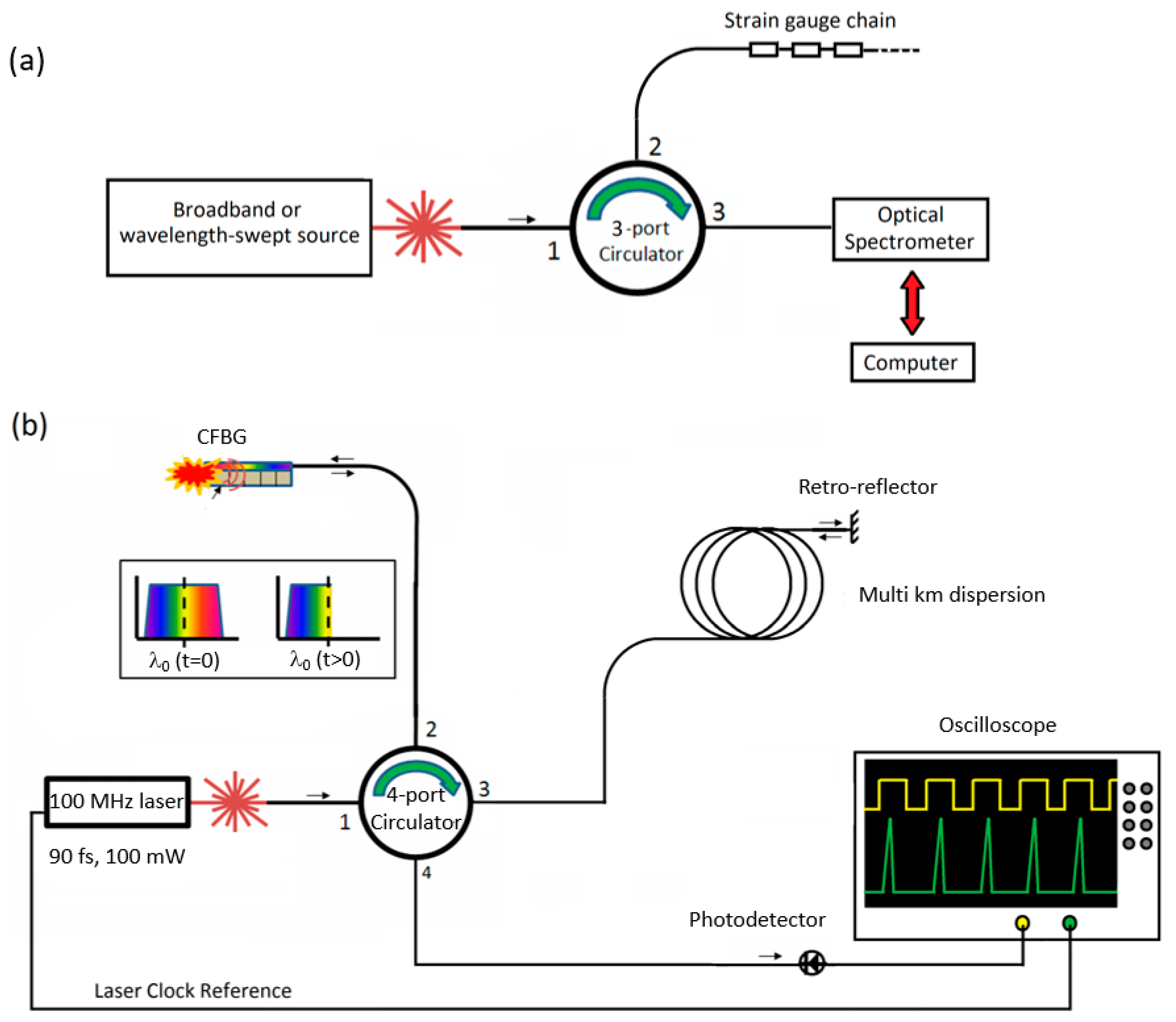
The second technique for global measurements makes a transient measurement in real time during the first 10 ms after the detonation event. This is an elastic measurement that can be more closely compared with the RTLS measurements. The technique is spectral interferometry for transient strain (SITS) measurements and a schematic is shown in
Figure 8.
First, a laser operating at 50 MHZ with an average power of 50 mW and pulse duration of ~100 fs was sent through a tunable filter. This allowed the spectral content of the laser to be modified for either increased range in the measurement or increased resolution. Using more bandwidth reduces the range over which length measurements can be made but also increases the resolution. The laser next entered the interferometer portion where it was split into two equal replicas with a 50:50 splitter. Each half of the light was sent to a 3 port circulator. One leg of the interferometer had the light sent to the device under test (DUT). In this case, the DUT was a vessel with a single optical fiber wrapped around it. A gold reflector was attached to the end of the fiber in order to capture as much of the light as possible. The light then reflected from the gold reflector and traveled back to the circulator. The other leg of the interferometer acted as the reference and had the light traveling through a variable delay and reflecting from another gold reflector. The two legs then recombined at a second 50:50 splitter. From here, 1% of the light was split off and sent to a spectrometer for comparison purposes. The remaining 99% of the light was sent through 50 km of dispersion which, along with the optical detector, acted as a dispersive Fourier transform [
24]. This allowed us to measure a representation of the spectral content of the combined signal on a fast oscilloscope. An erbium-doped fiber amplifier (EDFA) was also included for post amplification if the signal was not strong enough. The scope chosen was a 25 GHz Tektronix scope with optional high memory. This allowed record lengths of 10 ms at 50 GS/s.
As this is a spectral measurement, interference fringes can be seen on the scope.
Figure 9 shows a sample set of fringes for two different delays between the two legs of the interferometer. When the delay between the two pulses is small, the fringes are large. However, when the DUT is put under strain, the fiber is stretched and the delay between the two pulses increases, causing the fringes to become much finer.
The longitudinal resolution of the measurement is dependent on the bandwidth of the source, while the total length change that can be measured is dependent on the total bandwidth, Δf, of the recording scope and the repetition rate, f
rep, of the light source. The resolution is given by:
where
λ0 is the center wavelength of the source and Δ
λ is the laser source bandwidth. The total range of the measurement is limited by when the scope can no longer resolve spectral fringes. By reducing the repetition rate of the source, an individual pulse can be further stretched so as to resolve fringes corresponding to larger separations between the signal and reference pulses without pulse to pulse overlap, although this is at the sacrifice of temporal resolution. The temporal period, T, of the fringes in the interferograms seen in
Figure 9 is given by T = 2πβ
2L/τ and the dispersion of optical fiber can be calculated from D = 2πcβ
2/λ
02, where L is the length of the dispersion fiber in the setup, β
2 is the group velocity dispersion in the fiber, and τ is the delay between the two pulses in the interferometer [
25]. The smallest value of T, and hence the largest value of τ that can be measured is limited by the scope bandwidth, Δ
f, and is 1/Δ
f. Solving for τand noting that the total range R
max that can be measured is cτ/n, the full range is given as:
where
n is the refractive index of the fiber. The units of
DL are (ps/nm). Equation (3) can be expressed in units of the desired resolution, Δz, using Equation (2) as R
max = 2(Δz)(Δλ)(Δf)DL/n. However, multiplying the total dispersion inherent in the setup, DL, by the bandwidth of the laser pulse Δλ, yields the duration of the laser pulse after propagation through the dispersive medium. The longest value this product can be without pulse-to-pulse overlap is the laser periodicity T
L = 1/f
rep.
For a desired resolution as calculated from Equation (3), the total maximum range which can be measured is therefore given by:
With a 50 MHz repetition rate and 25 GHz bandwidth scope, ranges of 3 cm from resolutions of 30 µm would be possible. Additionally, a new measurement would be made every 20 ns which allows for high precision in temporal changes of the total circumference of the vessel.
To analyze data in SITS measurements, the time axis on the scope must be changed back into the spectral domain. A method similar to how the data is parsed and re-labeled with a wavelength axis in the RTLS measurements is first conducted on the raw SITS data recorded from the scope. The wavelength range was determined by comparison with the spectrometer measurements made before the experiment. The DC component of the signal is subtracted and a Fast Fourier Transform (FFT) is applied to every temporal measurement. The FFT yields two sidebands located at +/− the delay between the two pulses and is dependent on the fringe separation in the spectral domain. As the strain measurements are made by the length change in the vessel, the initial difference in delay from before the detonation event must be known. To accomplish this, static spectra were recorded a few minutes before the experiment began with known delays between the two legs of the interferometer. These acted as calibration spectra. Again, the DC signal was subtracted and an FFT was applied to each spectrum.
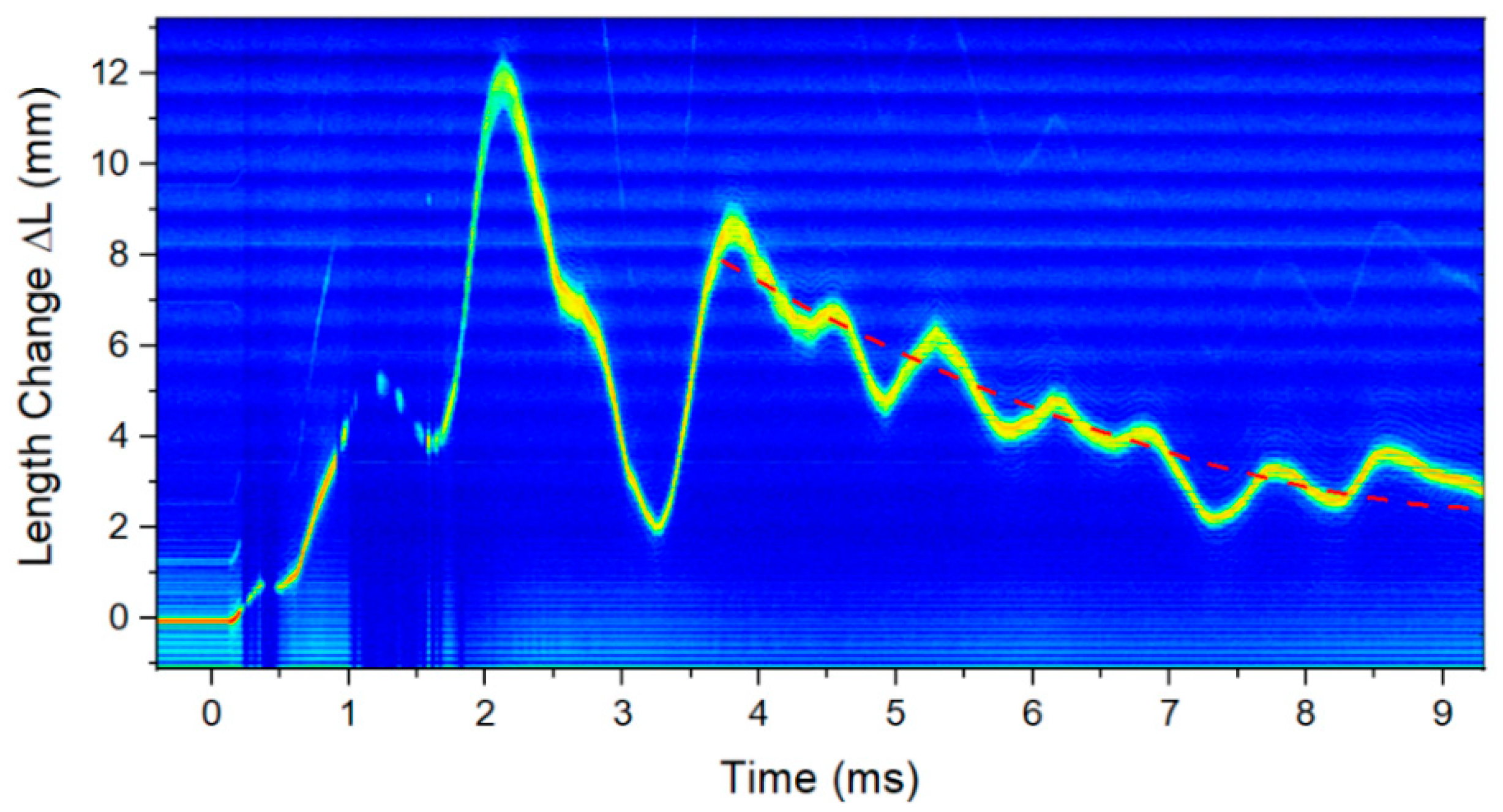
Figure 10 shows a sample result of this analysis. The FFT determined the initial offset between the DUT leg and the reference leg to be 2 mm.
When a 1 mm delay was removed from the reference leg, the sidebands showed a corresponding shift of 1 mm. A 2D image showing the location of the sideband as a function of time was made to visualize the total length change during the experiment.
For the actual experiment, care was made in the initial tuning. The zero delay point represents no fringes in the spectral domain and we chose to avoid it so that the sidebands would not cross. As it was expected that the fiber would stretch during the experiment leading to increased delay, the initial offset was adjusted such that the positive sideband would start at some pre-defined value and only move to a larger value rather than moving towards the 0 delay.
This particular diagnostic acted as a bridge between the RTLS measurements and the Luna measurements to measure the global circumferential change in the vessel during the dynamic experiment. The SITS result could be compared with the individual strain gauges to show how the total circumference relaxes dynamically or compared with the Luna measurements to show how the vessel plastically deforms.
The optical techniques listed in this section can be summarized in the following table (see
Table 1). RTLS and SITS both measure dynamically the transient response of the vessel as it elastically returns to the unstrained state, but only for a limited amount of time after the start of the experiment. The short timescales of these diagnostics limit the amount of information that can be gathered due to plastic or permanent deformation in the vessel. Luna measurements are employed for static or plastic deformation in the vessels due to the slow nature of the recording method.
2.3. Electrical Strain Gauges
All strain gauges were installed at a vessel preparation facility prior to the movement of the vessel to the firing site. A total of 9 strain gauge rosettes were installed on the vessel exterior. One of the 9 strain gauge rosettes was used as a dummy gauge and all three gauges on that rosette were wired. This gauge acted as a dummy gauge because it was not provided with excitation power during the test, so a response seen on this gauge is electrical noise. Vishay micro-measurements CEA-06-250UR-350 strain gauges were selected based upon the vessel material, expected strain, mounting configuration, and sensitivity. This part number corresponds to a constantan grid, completely encapsulated in a polyimide rosette that has a 0.25 inch gauge length and a nominal resistance of 350 ohms. The gauges selected are also temperature compensated for steel, though this is not a necessary requirement for the dynamic strain measurement being made during this test. The gauges have a nominal gauge factor of 2.1 for grid 1 (horizontal), 2.125 for grid 2 (diagonal), and 2.1 for grid 3 (vertical).
The resistance change of a strain gauge is very small and often poses a challenge to accurately measure. While many different methods exist to measure change in resistance, a Wheatstone bridge powered by a precision voltage source is commonly used as it provides the capability to measure both static and dynamic signals. The purpose of the Wheatstone bridge is to provide a means of measuring a voltage centered at 0 V and correlating that voltage to a resistance. A balanced bridge provides a reference voltage centered at 0 V. The sense voltage can be amplified via an operational amplifier. This method is an improvement over directly measuring the gauge resistance as resolution error is reduced. Adding such complexity into a measurement system brings additional challenges regarding the uncertainty and increased introduction of noise.Accuracy can be degraded by factors such as voltage losses in the lead lines attached to the gauge. Three wire gauges used in the quarter bridge configuration minimize this gauge desensitization effect [
26] as opposed to a two wire configuration. While the three wire strain gauge configuration possesses other attributes such as temperature compensation, the thermal capacitance of the vessel negates thermal dynamics.
Nearly all the components necessary in a measurement including the operational amplifier, low pass filter, 5 MHz analog to digital converter, and precision bridge excitation are packaged into a commercially available data acquisition system. Bridge completion is external to the data acquisition system by using rack mounted precision 350 Ohm resistors. Care is taken to minimize the length of wire from the gauge to bridge completion reducing the desensitization effect. It is also desirable to minimize the length of wire before amplification. This has the potential to reduce the amount of noise that is amplified. The overpressure test required about 15 feet of wire to bridge completion and another 10 feet of wire before amplification. Both the vessel and data acquisition chassis are tied to the building electrical ground. This method introduces a potential ground loop and potential 60Hz noise but ensures components are electrically safe to touch.
During the shot, vessel acceleration is violent enough to rip wires off solder tabs due to inertial cable loading. Through practice, Lawrence Livermore National Lab has found this effect best mitigated by using small gauge wire (30 AWG) and strain relief wire loops between the gauge and solder tabs shown in
Figure 11.
Proper gauge application is also necessary to ensure intimate contact of the gauge with the surface. Vishay surface preparation recommendations are followed including paint removal with an angle grinder, directional sanding, and pre-bond surface preparations applied. Vishay M-Bond AE-10 is applied to gauges and solder tabs to bond to the vessel surface. A vacuum pad is placed over the gauge to apply pressure to the gauge and the vessel surface for a day while the bond cures. A layer of Vishay M-Coat-A polyurethane is applied to the strain gauge and the solder tabs to protect gauges and provide electrical insulation.
2.4. FEA Simulations
Prior to an explosive test in a vessel, a hydrodynamic computation (for example, with CTH from Sandia National Laboratories) is conducted to simulate the HE blast and to calculate pressure history profiles at many tracer points located next to the internal wall of the vessel. The development of optical diagnostics capable of delivering low noise and high accuracy measurements of the strain are critical to improving the modeled vessel performance. As such, the experimental data is being used to verify or improve the FEA code rather than the code being used to explain the model. Normally we use 2D, axisymmetric models for the hydrodynamic computation, but depending on the HE setup inside the vessel, we also compute pressure profiles using 3D models. Next, with an explicit, dynamic Abaqus 3D FEA, we verify the vessel’s structural integrity by subjecting it to the internal pressures computed with the hydrodynamic software. The pressure profiles are applied to areas assembled with element faces that are close to the location of their corresponding tracer point.
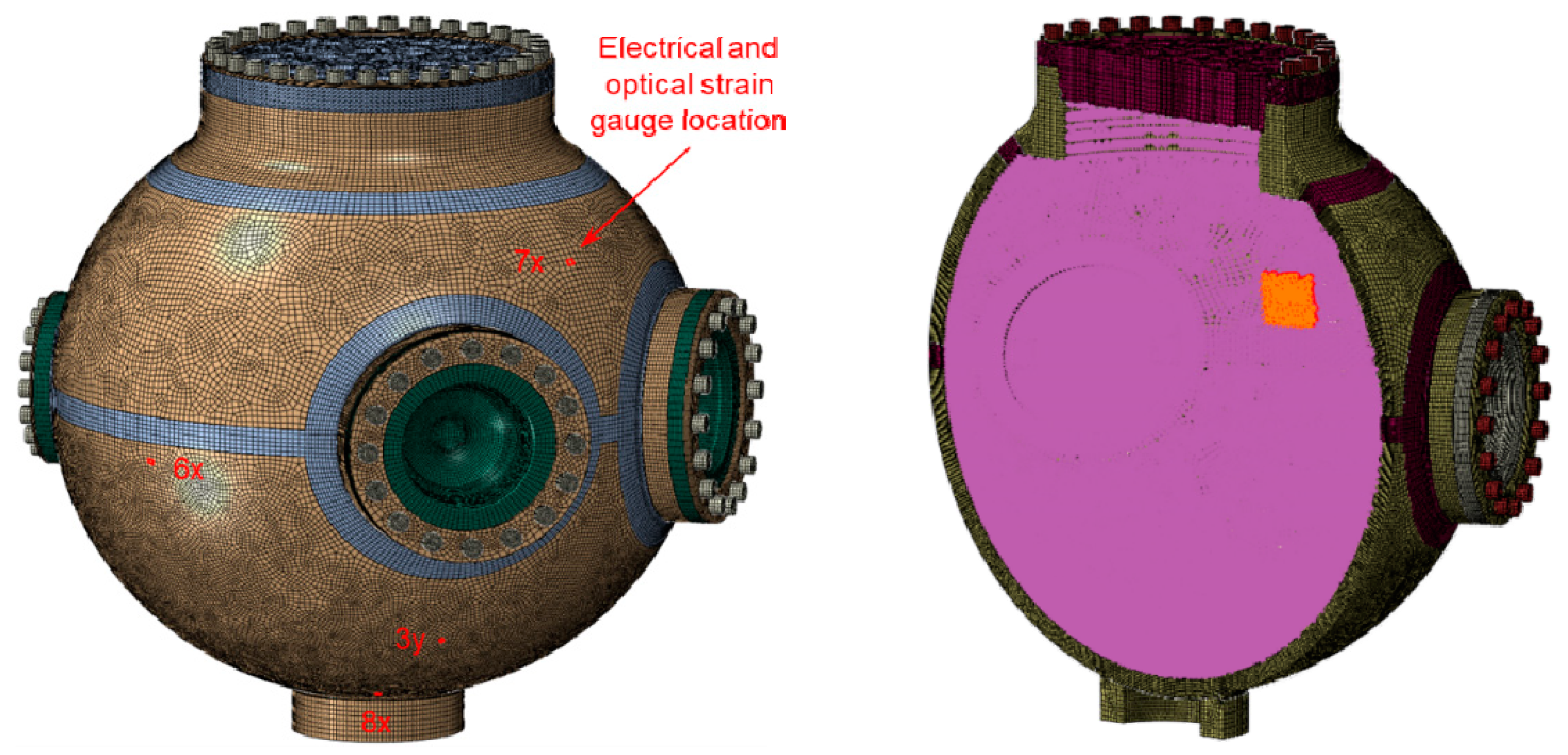
Figure 12 depicts the FE model of the 0.9 m vessel with a shell thickness equal to 2.82 cm that was subjected to an overpressure test.
Highlighted on the left figure are the finite elements that were used to correlate the computed strains to the test measurements, and on the right we show an small area to which we apply a pressure profile next to a tracer. To secure the covers to the nozzles, we preload the FE model for the bolts to the actual preload for the test; for example, in the 1.8 m vessel with a 6.35 cm thick shell shown in
Figure 13, the preload for each bolt (of 64 per cover) is about 245,000 N (55,000lbf). It should be noted that the bolt preload affects the FE computation. Based on our experience with the tests and FE analyses, we run the FE computation to 10.0 ms, which is when the vibration of the vessel is diminished because of the natural material damping and the friction between covers and nozzles.
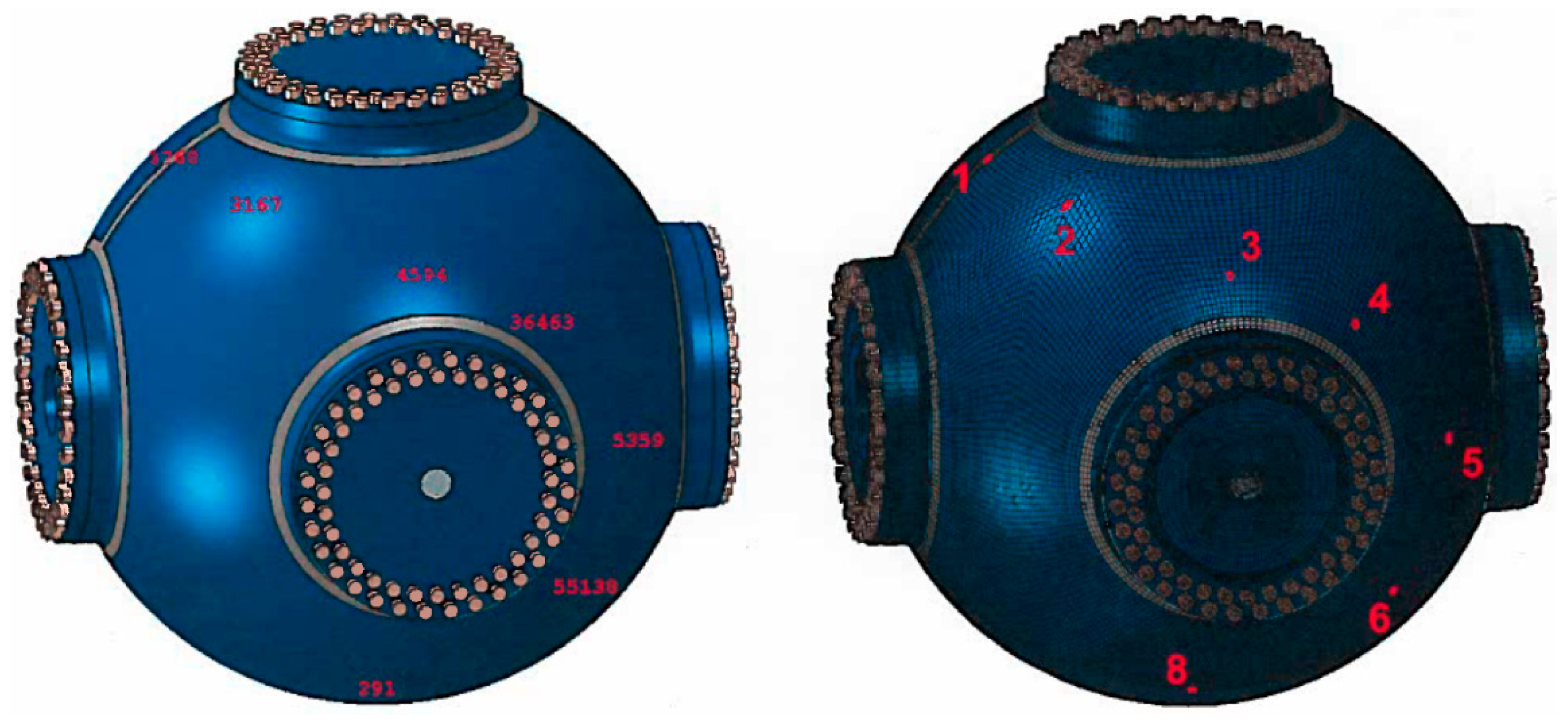
Briefly, these are the sequence of events during the transient FE results of an 1.8 m confinement vessel (
Figure 13) when subjected to in internal HE blast: Following the first pressure surge at the tracers on the internal wall, which might last for about 0.5 ms, the vessel’s shell expands and contracts in 1.0 ms. In the 1.8 m vessel, the heavier ports are slower to react to the initial pressure and the internal stresses from the expanding shell, but once they catch up with the dynamics of the shell, the whole vessel attains at near 2.5 ms a natural vibration. In general, when vibrating at its natural frequency of about 1300 Hz, there are locations on the vessel that reach their highest strain/stress levels. At 7.0 ms, the elastic stresses that sustained the natural vibration begin to dissipate as the results of damping and friction.
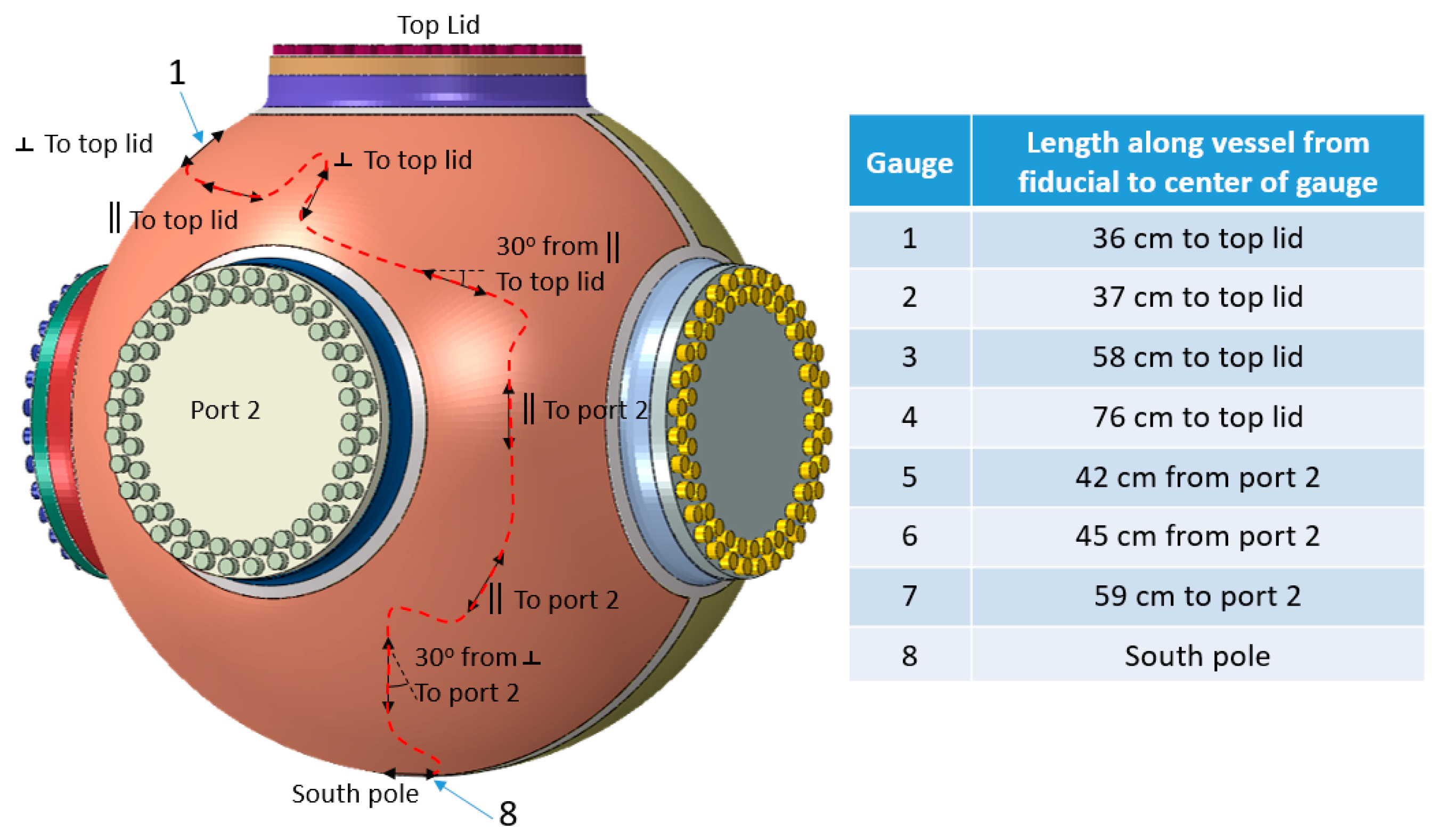
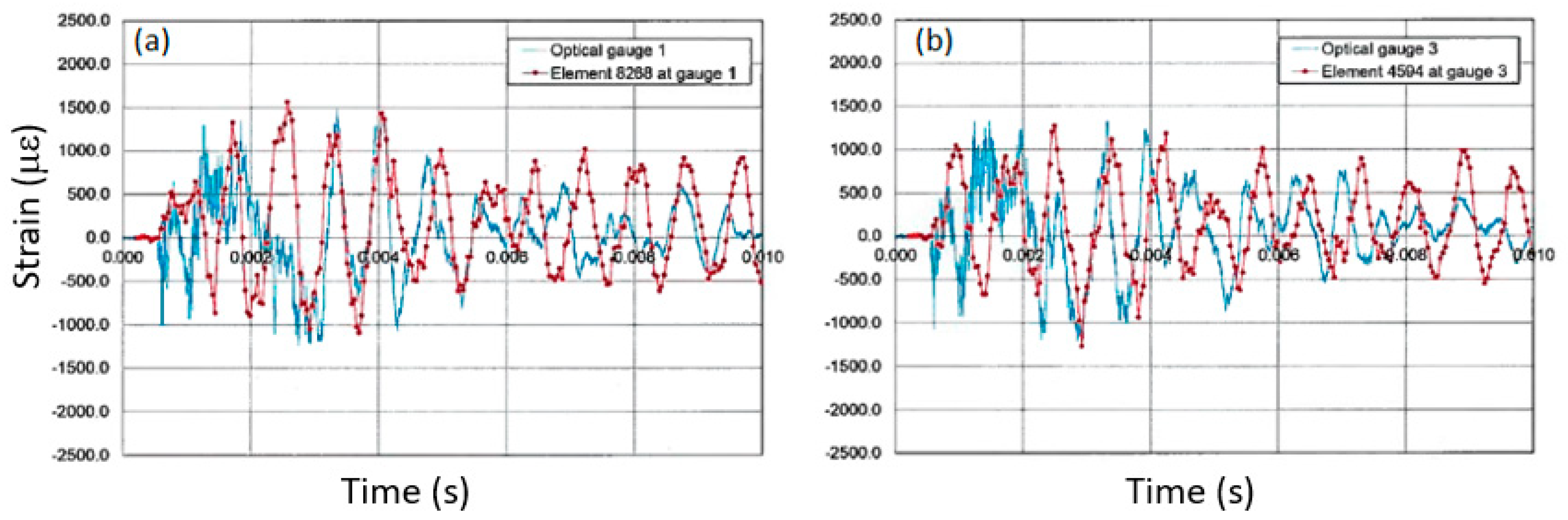
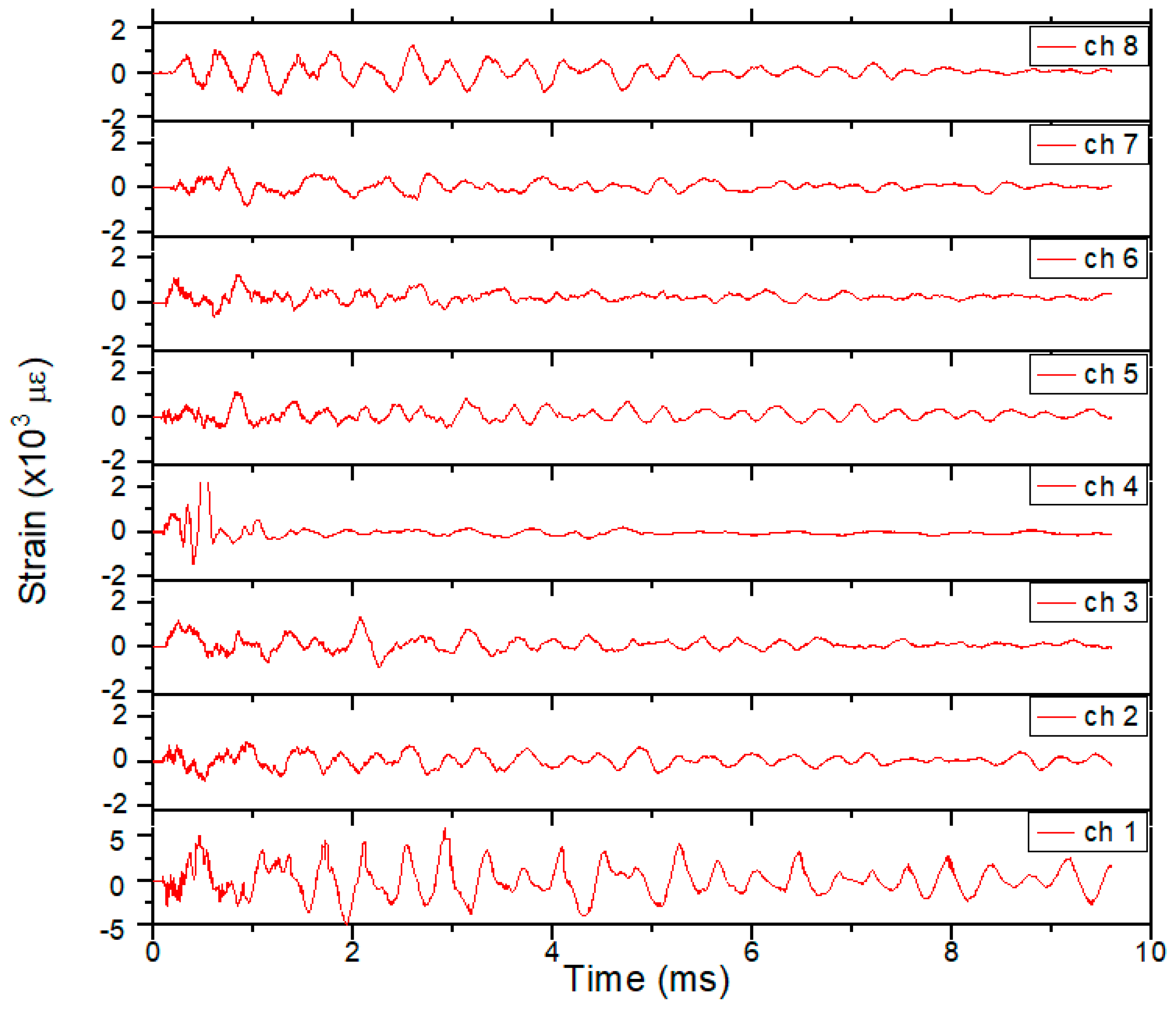
Figure 13 shows the element numbers chosen for the finite element correlation in the left figure. The right figure shows the optical gauge number in the experimental FBG chain. For example, number 1 is the first gauge corresponding to the 1530 nm central wavelength and number 8 is the final gauge corresponding to the 1565 nm central wavelength.
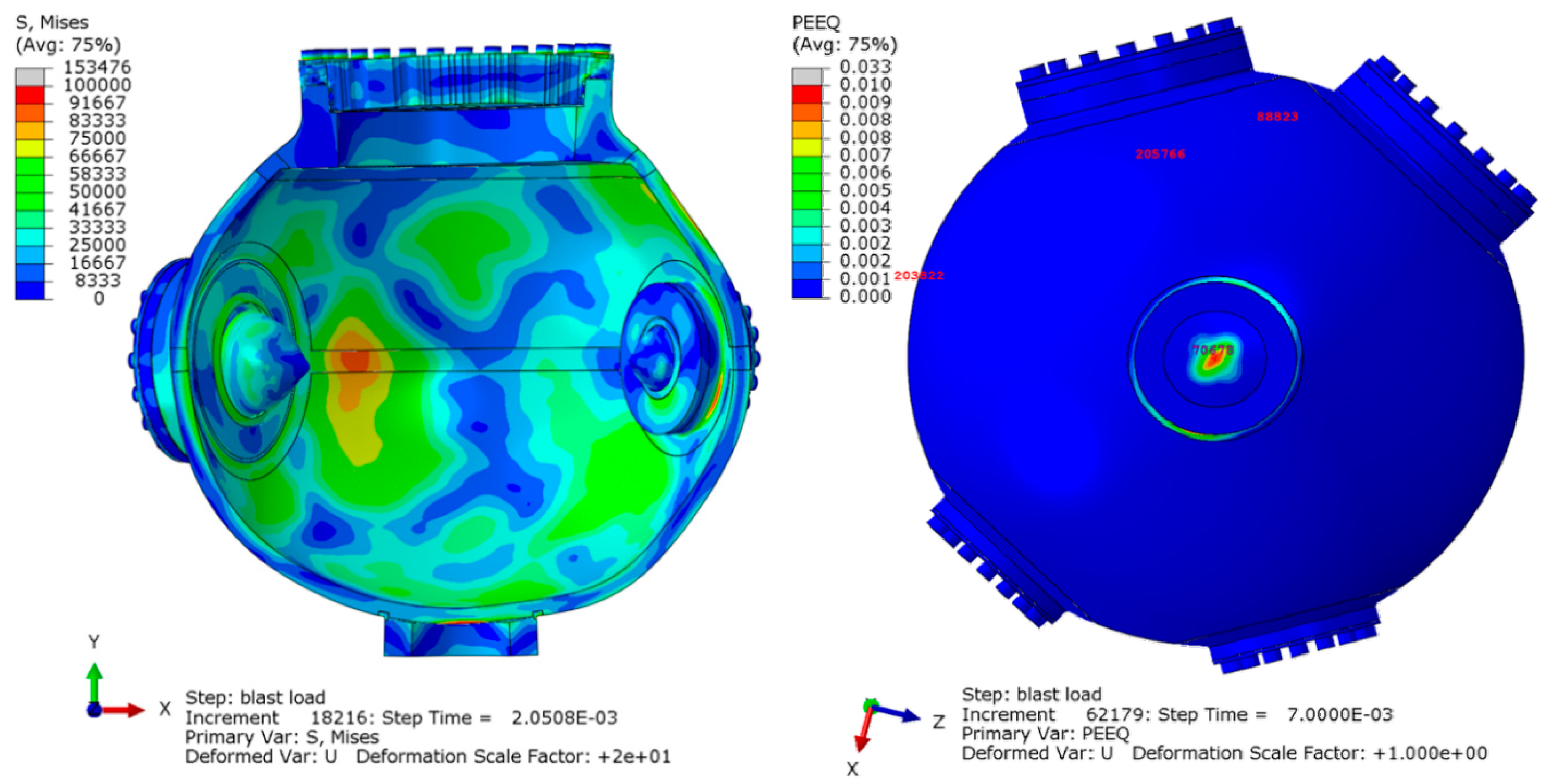
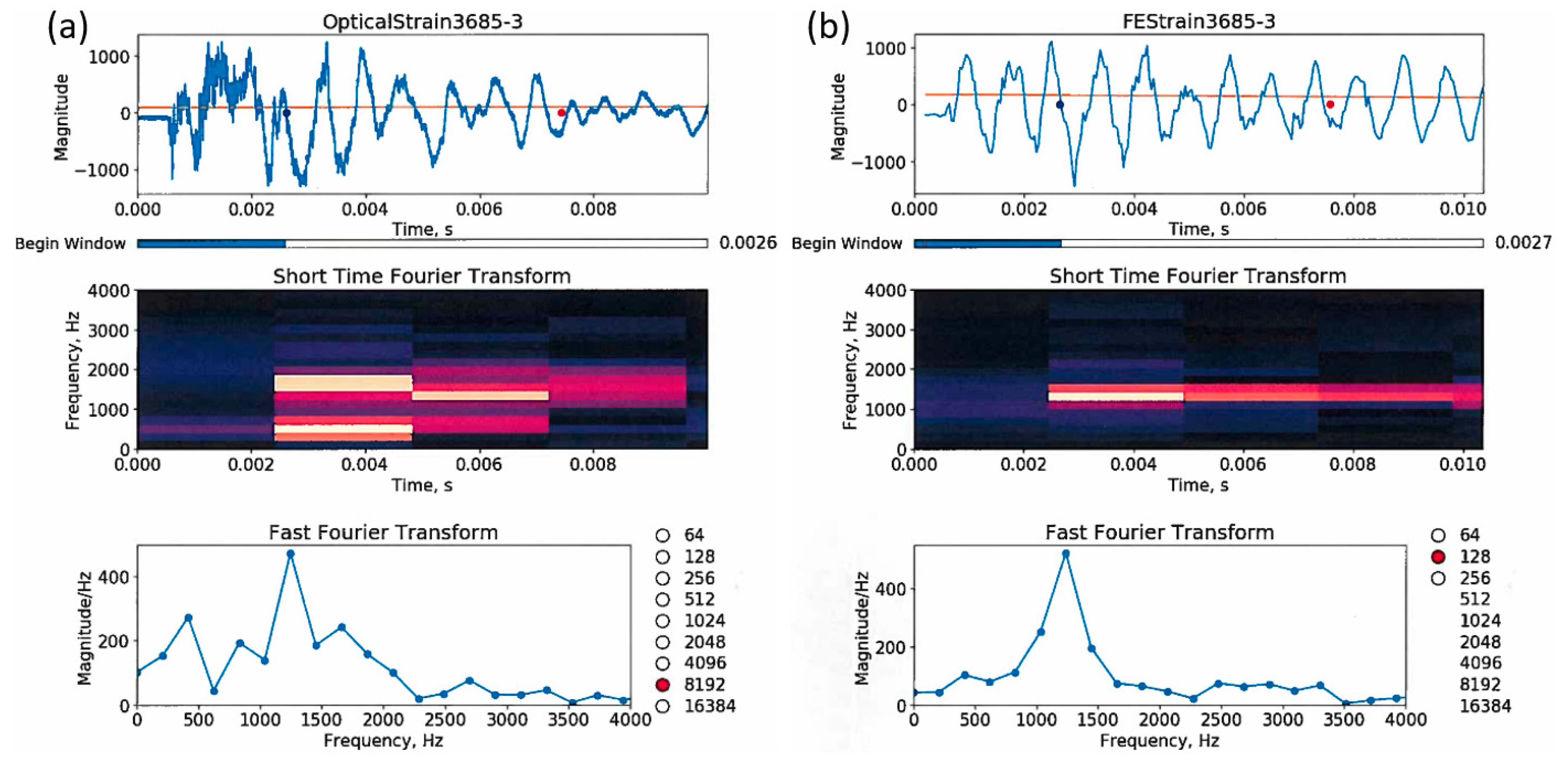
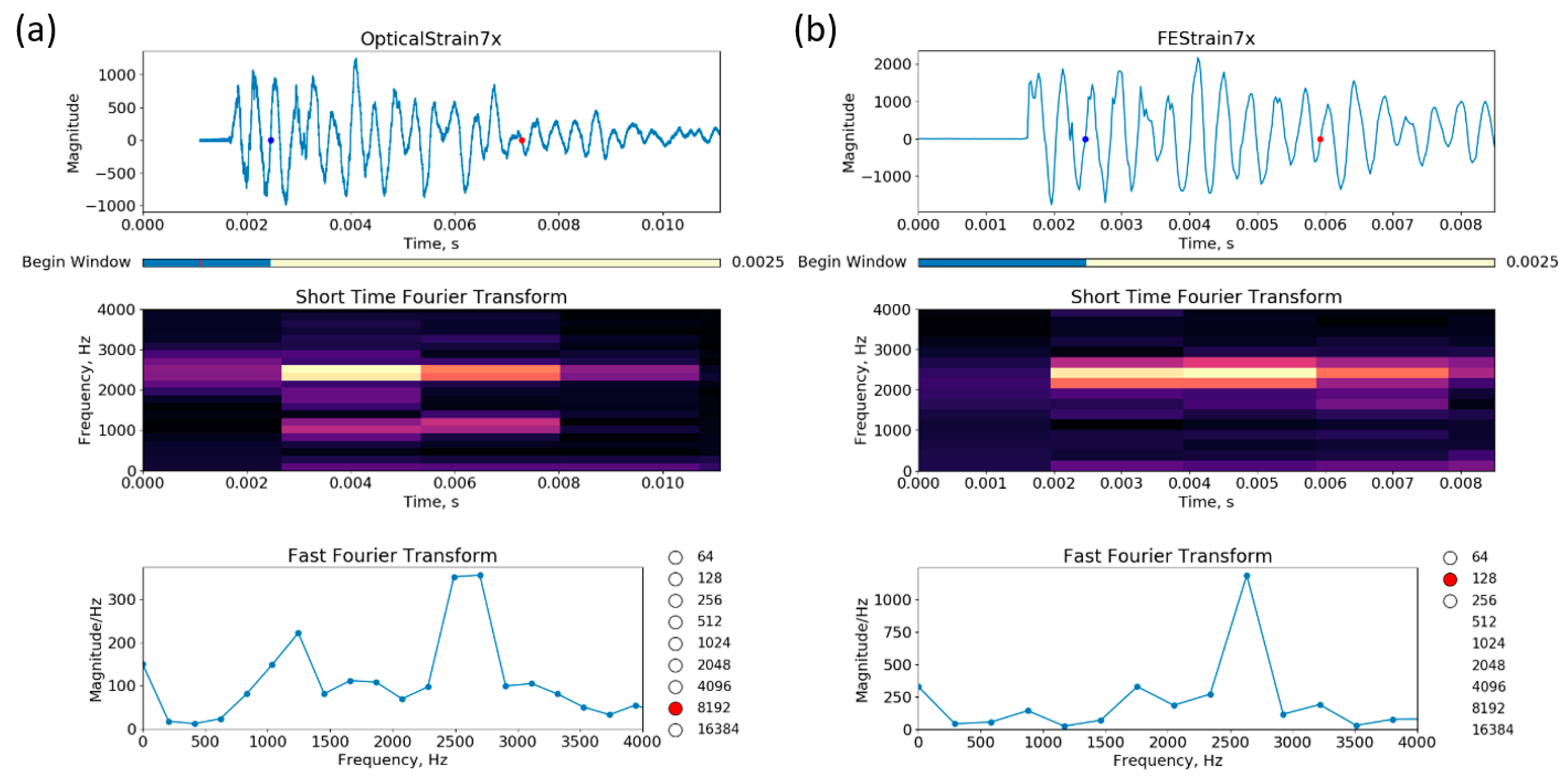
To assess the structural soundness of the vessels subjected to impulsive loading, the FE results are compared to the limits stated in Code Case 2564 of the ASME Boiler and Pressure Vessel Code, Section VIII, Division 3. A Mises stress field and the equivalent plastic strain (named PEEQ in Abaqus) are shown in
Figure 14. Note that the south pole of the vessel, located on the y-axis, accumulates large plastic strains. This is because the south pole is active in most modes of vibration of the vessel, and furthermore, it is locally blasted with a high pressure. Additionally, we compute transient loads in the bolts, which should not exceed the proof load of a bolt, and the relative displacements between covers and nozzles to ensure that there will not be any outgassing. Therefore, we recognize that to comply with the structural requirements of the vessels to the large amount of HE in the tests and the inherent difficulty when computing their internal pressures and dynamic response, we must validate our integrated hydrodynamic and FEA against strain measurements obtained on the shell of the vessels. Because this is our first effort, we have not adjusted parameters for the hydrodynamic and FE computations in order to obtain better correlations. Currently, the metrics for the comparisons simply include: visuals of the FE strain vs. the optical strain measurement; the short time Fourier transform (STFT) to assess the frequency vs. time strain responses; and a FFT to assess the natural frequency of the vessels when the strains become large. Comparisons between these metrics will be shown in later sections.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}