A Kinematic Model of a Humanoid Lower Limb Exoskeleton with Hydraulic Actuators



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
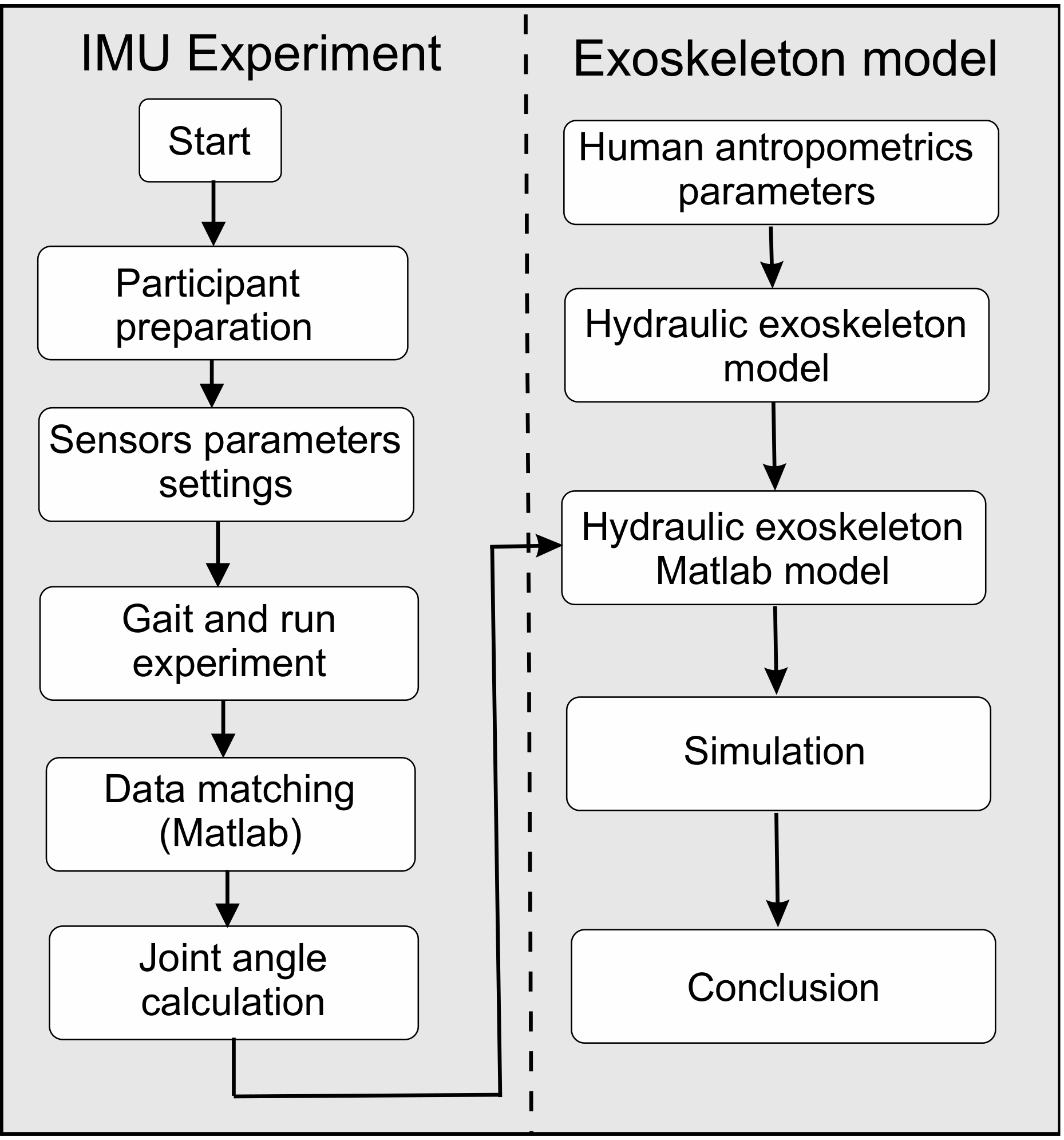
2. Materials and Methods
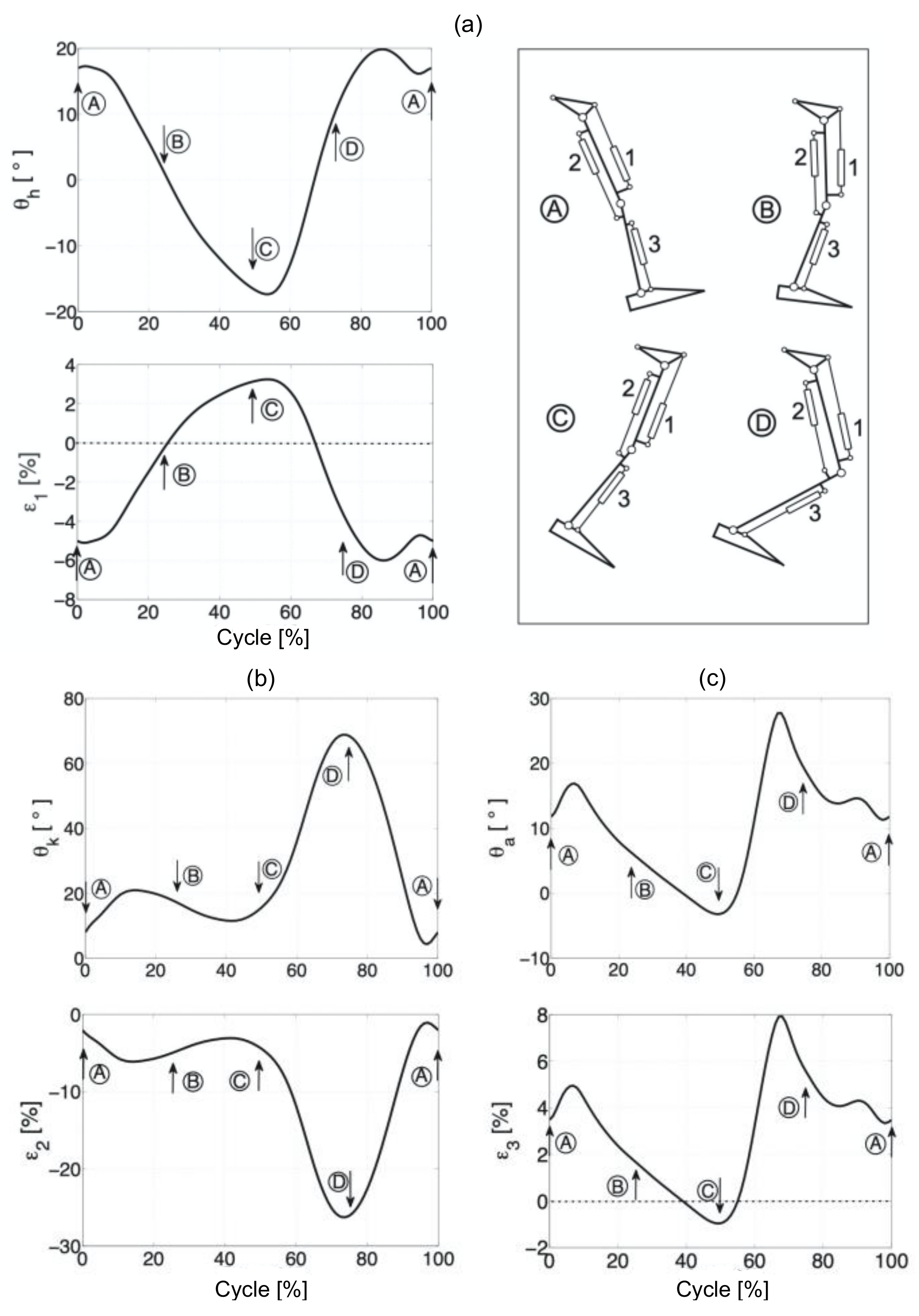
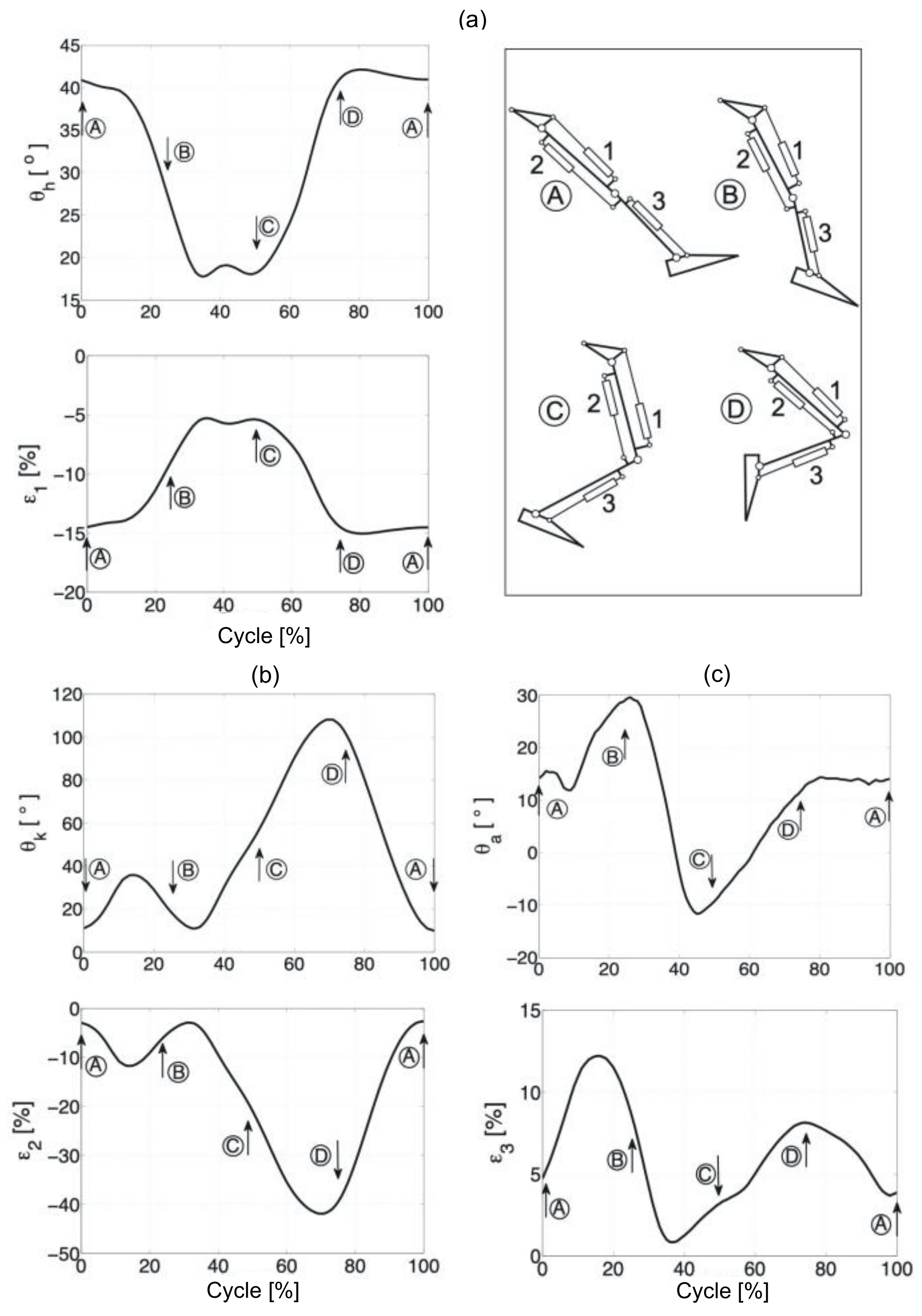
2.1. Lower Limb Angles during Walking and Running
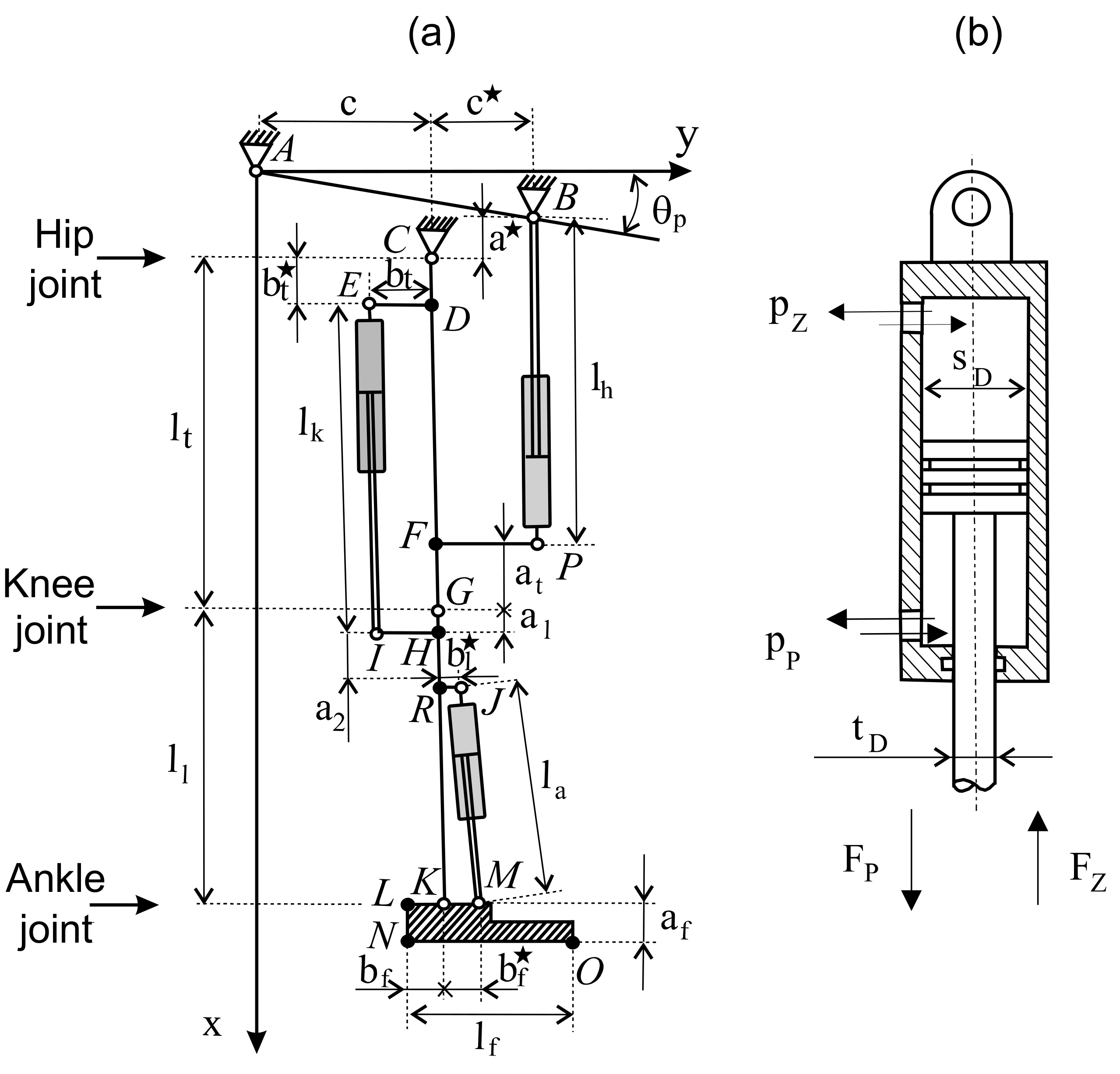
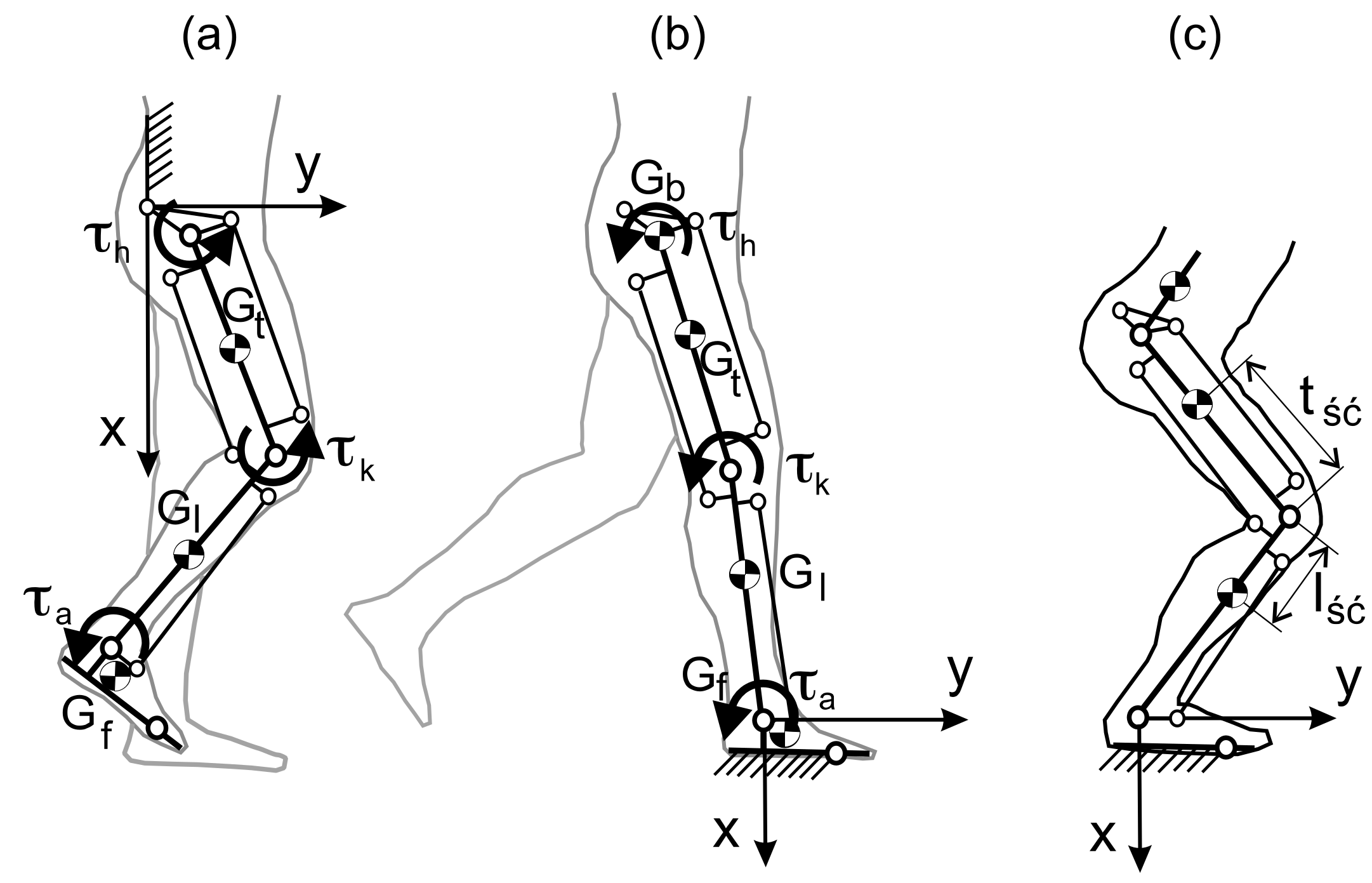
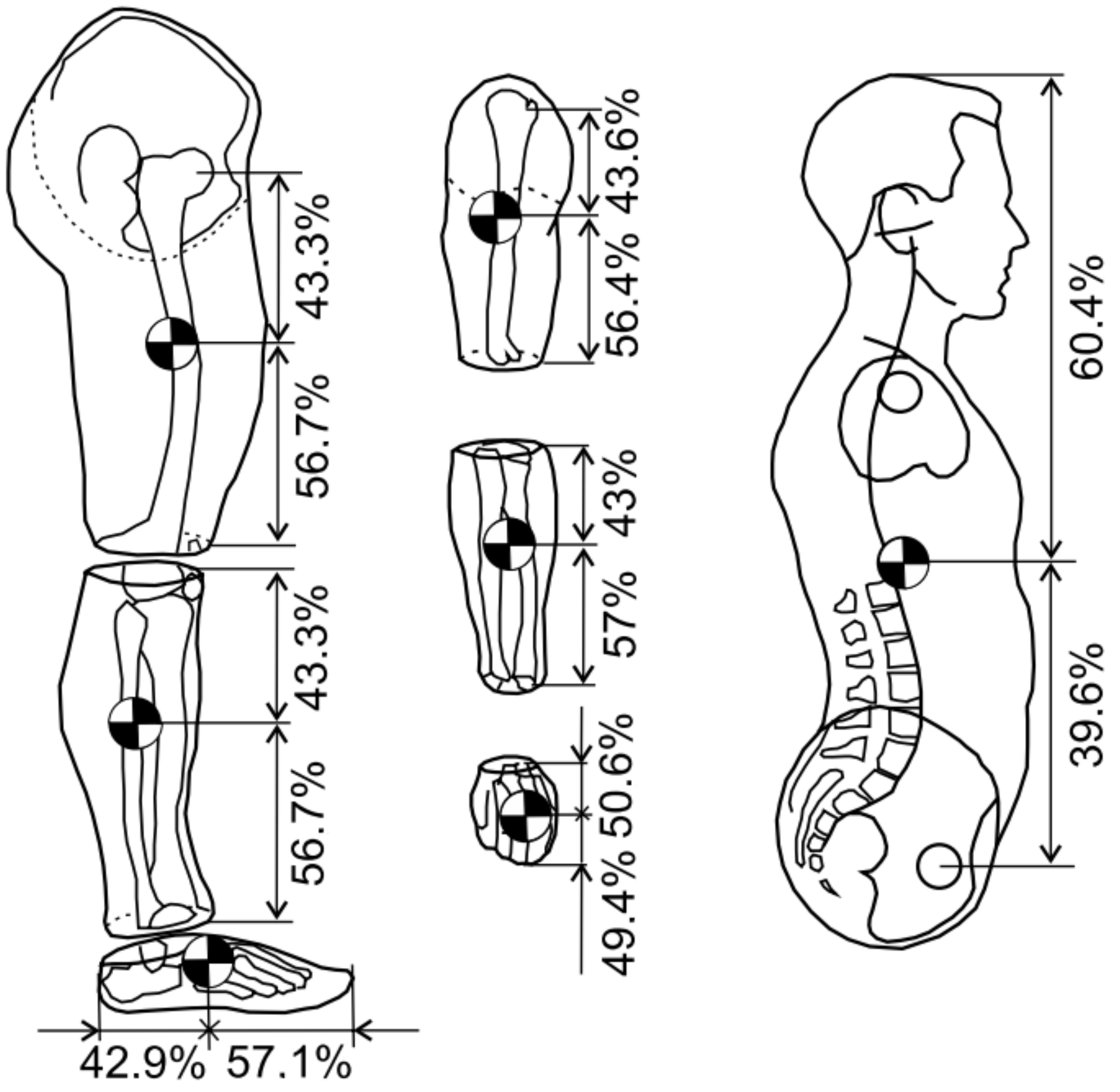
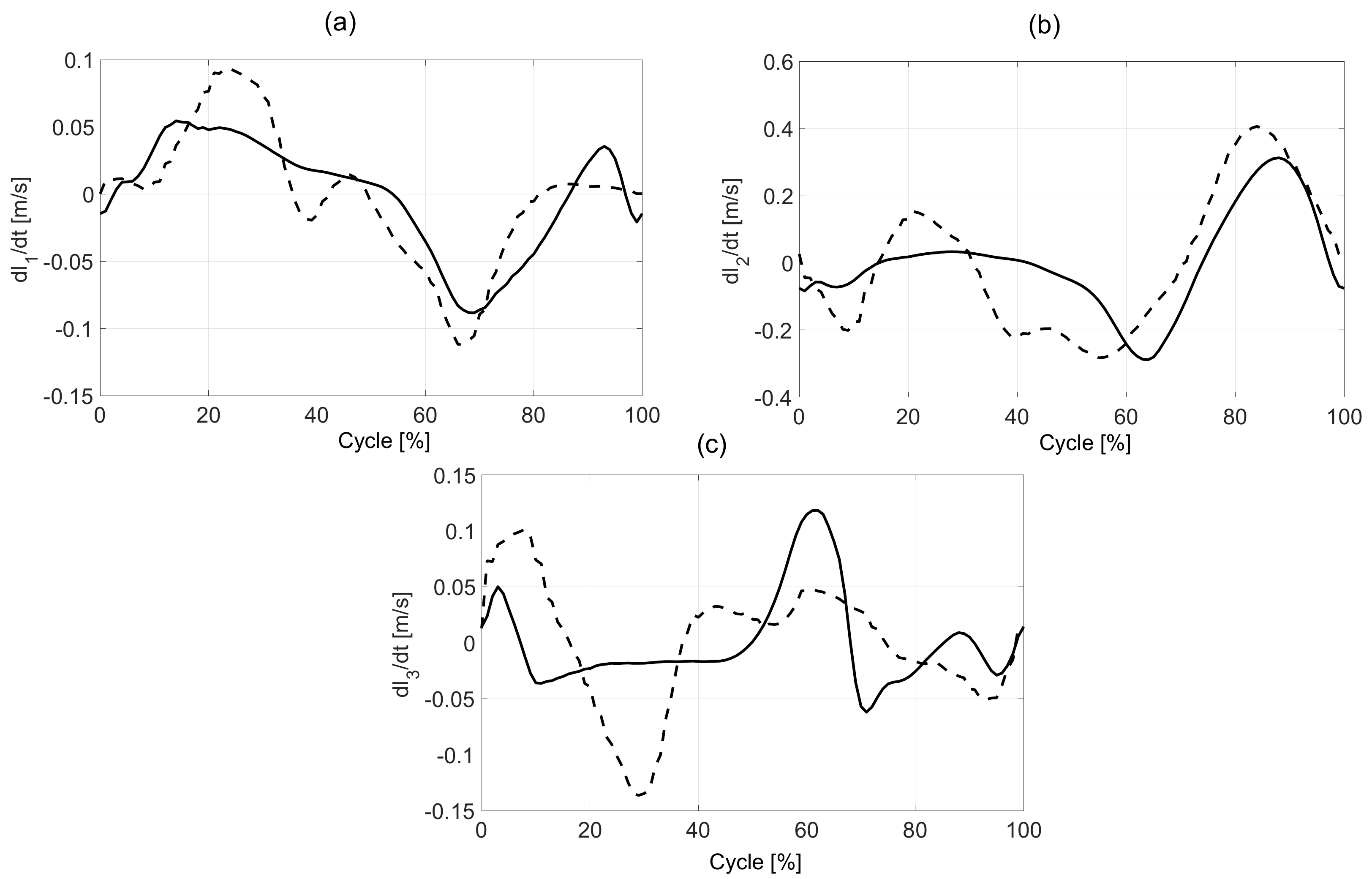
2.2. Exoskeleton of the Lower Limb with Hydraulic Actuators Model
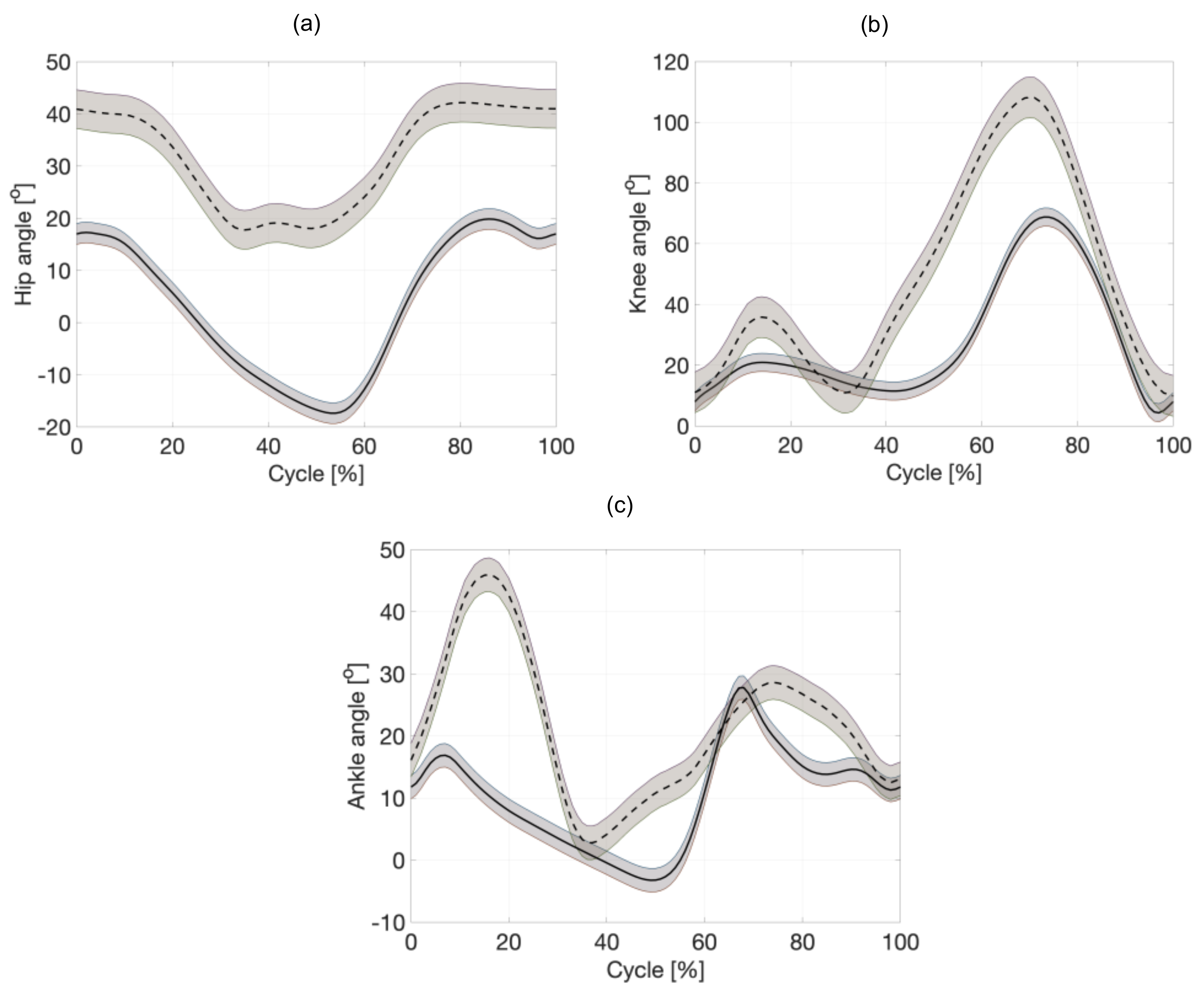
3. Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Pons, J.L. Wearable Robots: Biomechatronic Exoskeletons; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Martinez, G.M.C.; Aviles, L.A.Z. Design Methodology for Rehabilitation Robots: Application in an Exoskeleton for Upper Limb Rehabilitation. Appl. Sci. 2020, 10, 5459. [Google Scholar] [CrossRef]
- Lippi, V.; Mergner, T.A. Challenge: Support of Standing Balance in Assistive Robotic Devices. Appl. Sci. 2020, 10, 5240. [Google Scholar] [CrossRef]
- Nitschke, J.; Kuhn, D.; Fischer, K.; Röhl, K. Comparison of the Usability of the ReWalk, Ekso and Hal Exoskeletons in a Clinical Setting. Orthop. Technol. 2014, 9, 21–24. [Google Scholar]
- Kazerooni, H.; Chu, A.; Steger, R. That which does not stabilize, will only make us stronger. Int. J. Robot. Res. 2007, 26, 75–89. [Google Scholar] [CrossRef]
- Taha, Z.; Majeed, A.P.P.A.; Abidin, A.F.Z.; Ali, M.A.H.; Khairuddin, I.M.; Deboucha, A.; Wong, Y. A hybrid active force control of a lower limb exoskeleton for gait rehabilitation. Biomed. Technol. 2018, 63, 491–500. [Google Scholar] [CrossRef] [PubMed]
- Treadway, E.; Gan, Z.; Remy, C.D.; Gillespie, R.B. Toward controllable hydraulic coupling of joints in a wearable robot. IEEE Trans. Robot. 2018, 34, 748–763. [Google Scholar] [CrossRef] [PubMed]
- Kawamoto, H.; Sankai, Y. Power assist method based on phase sequence and muscle force condition for HAL. Adv. Robot. 2005, 19, 717–734. [Google Scholar] [CrossRef]
- Walsh, C.; Paluska, D.; Pasch, K.; Grand, W.; Valiente, A.; Herr, H. Development of a lightweight, underactuated exoskeleton for load-carrying augmentation. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3485–3491. [Google Scholar]
- Esquenazi, A.; Talaty, M.; Packel, A.; Saulino, M. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am. J. Phys. Med. Rehabilit. 2012, 91, 911–921. [Google Scholar] [CrossRef]
- Lee, T.; Lee, D.; Song, B.; Baek, Y.S. Design and Control of A polycentric Knee Exoskeleton Using an Electro-Hydraulic Actuator. Sensors 2020, 20, 211. [Google Scholar] [CrossRef]
- Nesler, C.R.; Swift, T.A.; Rouse, E.J. Initial Design and Experimental Evaluation of a Pneumatic Interference Actuator. Soft Robot. 2018, 5, 138–148. [Google Scholar] [CrossRef]
- Glowinski, S. Wybrane Zagadanienia Projektowania i Modelowania Egzoszkieletów Kończyn Dolnych; Koszalin Technical University: Koszalin, Poland, 2016; p. 198. (In Polish) [Google Scholar]
- Yu, H.; Huang, S.; Thakor, N.V.; Chen, G.; Toh, S.-K.; Cruz, M.S.; Yassine, G. A novel compact compliant actuator design for rehabilitation robots. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K.; Shiojima, K.; Han, M.M. Triaxial joint moment estimation using a wearable three-dimensional gait analysis system. Meas. J. Int. Meas. Confed. 2014, 47, 125–129. [Google Scholar] [CrossRef]
- Inertia Technology. Available online: http://www.inertiatechnology.com/promove-mini (accessed on 10 January 2019).
- Glowinski, S.; Blazejewski, A.; Krzyzynski, T. Inertial sensors and wavelets analysis as a tool for pathological gait identification. Adv. Intell. Syst. Comput. 2017, 526, 104–114. [Google Scholar] [CrossRef]
- Glowinski, S.; Łosiński, K.; Kowiański, P.; Waśkow, M.; Bryndal, A.; Grochulska, A. Inertial Sensors as a Tool for Diagnosing Discopathy Lumbosacral Pathologic Gait: A Preliminary Research. Diagnostics 2020, 10, 342. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Van Der Helm, F.; Veeger, H.; Makhsous, M.; Van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef] [PubMed]
- Abhayasinghe, N.; Murray, I.; Bidabadi, S.S. Vaidation of Tigh Angle Estimation Using Inertial Measurement Unit data against Optical Motion Capture Systems. Sensors 2019, 19, 596. [Google Scholar] [CrossRef]
- Justa, J.; Smidl, V.; Hamacek, A. Fast AHRS Filter for Accelerometer, Magnetometer, and Gyroscope Combination with Separated Sensor Corrections. Sensors 2020, 20, 3824. [Google Scholar] [CrossRef]
- Shen, S.; Gowda, M.; Choudhury, R.R. Closing the Gaps in Inertial Motion Tracking. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking (MobiCom ‘18), New Delhi, India, 29 October–2 November 2018. [Google Scholar] [CrossRef]
- Favre, J.; Jolles, B.M.; Siegrist, O.; Aminian, K. Quartenion-based fusion of gyroscopes and accelerometers to improve 3D angle measurement. Electron. Lett. 2006, 42, 612–614. [Google Scholar] [CrossRef]
- van Hees, V.T.; Gorzelniak, L.; Leon, E.C.D.; Eder, M.; Pias, M.; Taherian, S.; Ekelund, U.; Renstrom, F.; Franks, P.W.; Horsch, A.; et al. Separating Movement and gravity Components in an Acceleration Signal and Implications for the Assessment of Human Daily Physical Activity. PLoS ONE 2013, 8. [Google Scholar] [CrossRef]
- Available online: https://www.vicon.com/hardware/ (accessed on 25 August 2020).
- Hof, A.L. Scaling gait data to body size. Gait Posture 1996, 3, 222–223. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Dempster, W.T. Space Requirements of the Seated Operator; Wright Air Development Center: Dayton, OH, USA, 1955. [Google Scholar]
- Denavit, J.; Hartenberg, R.S. A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices. J. Appl. Mech. 1955, 77, 215–221. [Google Scholar]
- Chen, X. Human Motion Analysis with Wearable Inertial Sensors. Ph.D. Thesis, The University of Tennesee, Knoxville, TN, USA, 2013. [Google Scholar]
- Mentiplay, B.F.; Banky, M.; Clark, R.A.; Kahn, M.B.; Williams, G. Lower limb angular velocity during walking at various speeds. Gait Posture 2018, 65, 190–196. [Google Scholar] [CrossRef] [PubMed]
- Damiano, D.L.; Laws, E.; Carmines, D.V.; Abel, M.F. Relationship of spasticity to knee angular velocity and motion during gait in cerebral palsy. Gait Posture 2006, 239, 1–8. [Google Scholar] [CrossRef]
- Williams, G.; Banky, M.; Olver, J. Severity and distribution of spasticity does not limit mobility or influence compensatory strategies following traumatic brain injury. Brain Inj. 2015, 29, 1232–1238. [Google Scholar] [CrossRef] [PubMed]
- Kańtoch, E. Recognition of sedentary behavior by machine learning analysis of wearable sensors during activities of daily living for telemedical assessment of cardiovascular risk. Sensors 2018, 18, 3219. [Google Scholar] [CrossRef] [PubMed]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glowinski, S.; Krzyzynski, T.; Bryndal, A.; Maciejewski, I. A Kinematic Model of a Humanoid Lower Limb Exoskeleton with Hydraulic Actuators. Sensors 2020, 20, 6116. https://doi.org/10.3390/s20216116
Glowinski S, Krzyzynski T, Bryndal A, Maciejewski I. A Kinematic Model of a Humanoid Lower Limb Exoskeleton with Hydraulic Actuators. Sensors. 2020; 20(21):6116. https://doi.org/10.3390/s20216116
Chicago/Turabian StyleGlowinski, Sebastian, Tomasz Krzyzynski, Aleksandra Bryndal, and Igor Maciejewski. 2020. "A Kinematic Model of a Humanoid Lower Limb Exoskeleton with Hydraulic Actuators" Sensors 20, no. 21: 6116. https://doi.org/10.3390/s20216116
APA StyleGlowinski, S., Krzyzynski, T., Bryndal, A., & Maciejewski, I. (2020). A Kinematic Model of a Humanoid Lower Limb Exoskeleton with Hydraulic Actuators. Sensors, 20(21), 6116. https://doi.org/10.3390/s20216116