Photon Counting Imaging with Low Noise and a Wide Dynamic Range for Aurora Observations

Abstract
:1. Introduction
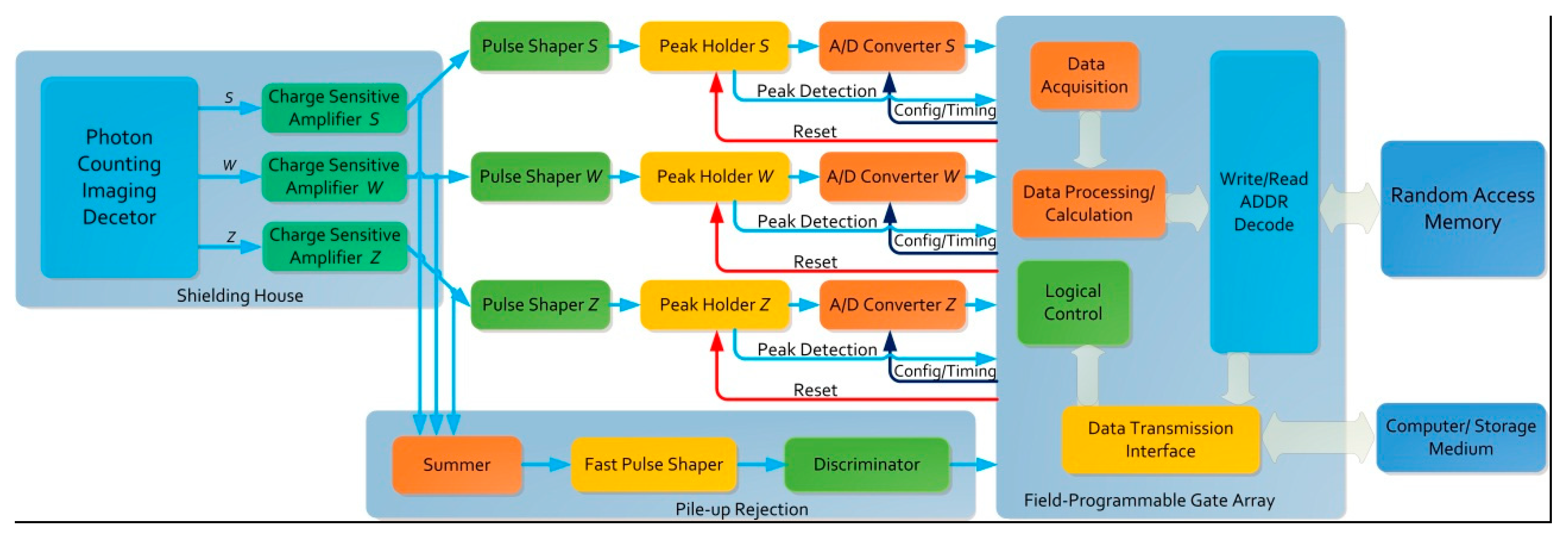
2. Design of the Detection System with Photon Counting
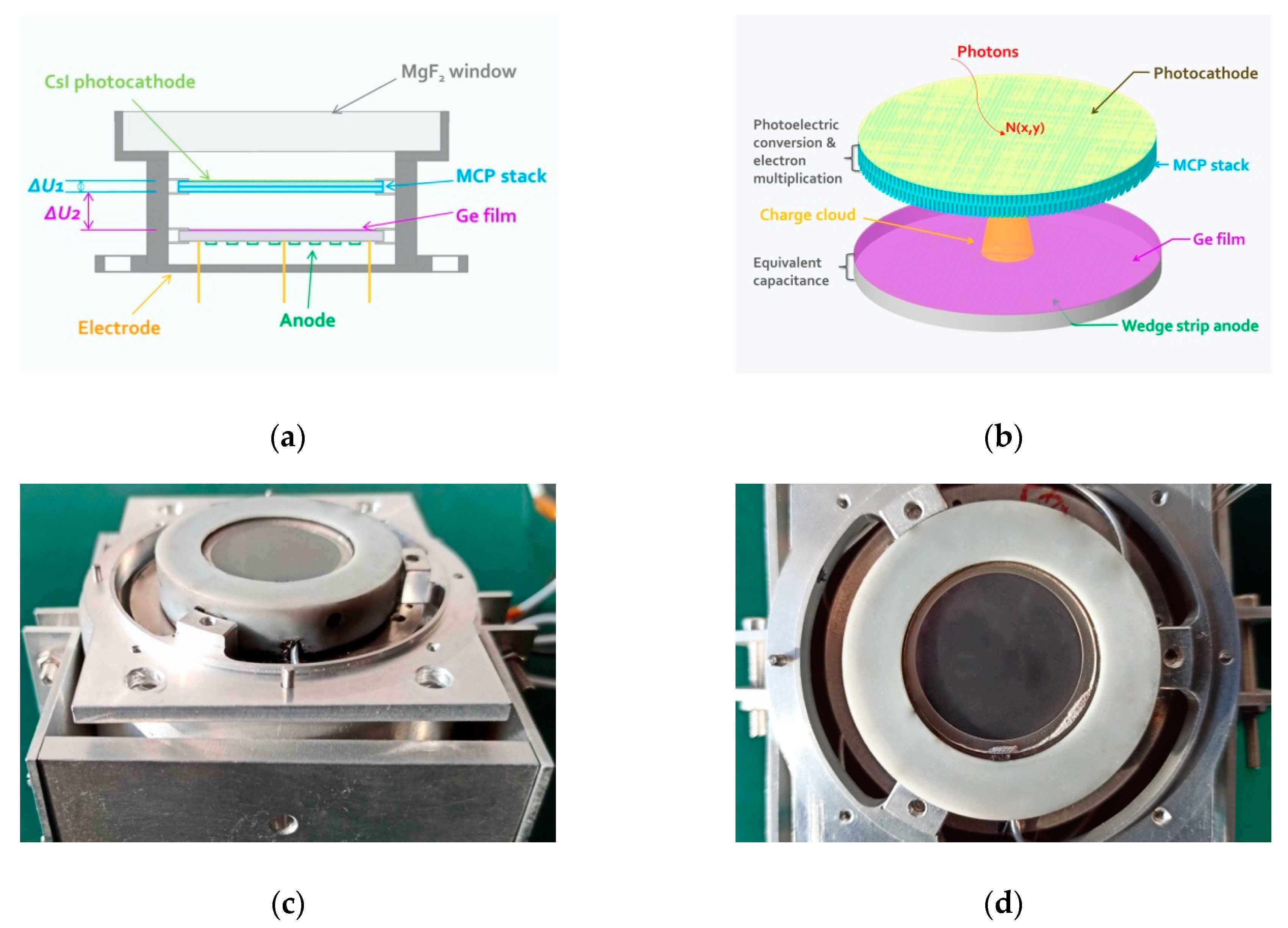
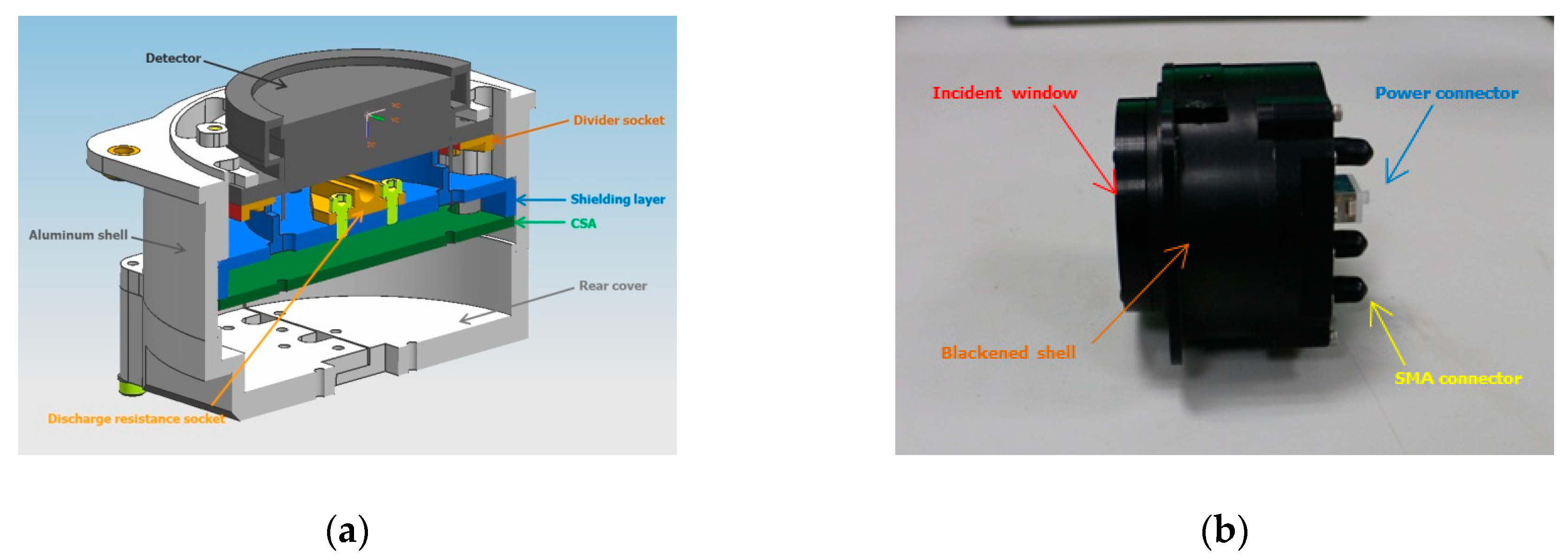
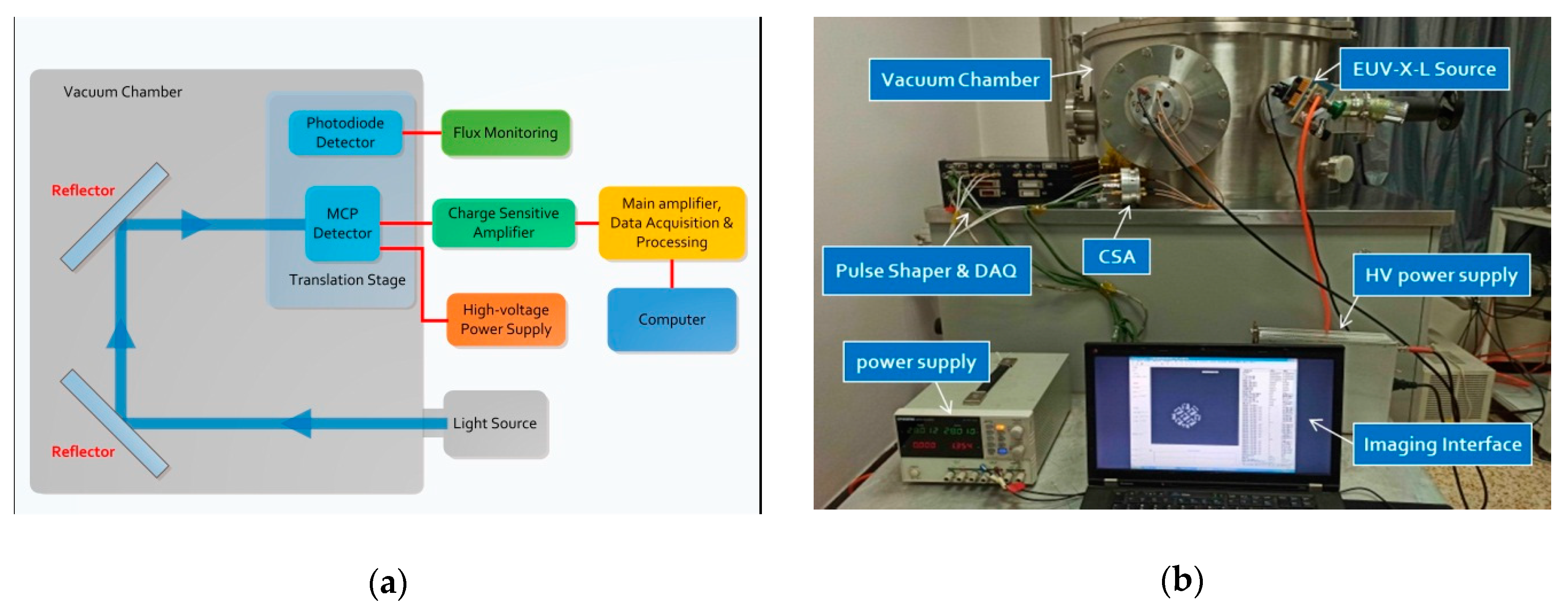
2.1. The Structure of Detector Assemblies
2.2. Evaluation of Readout Modes with Charge Induction
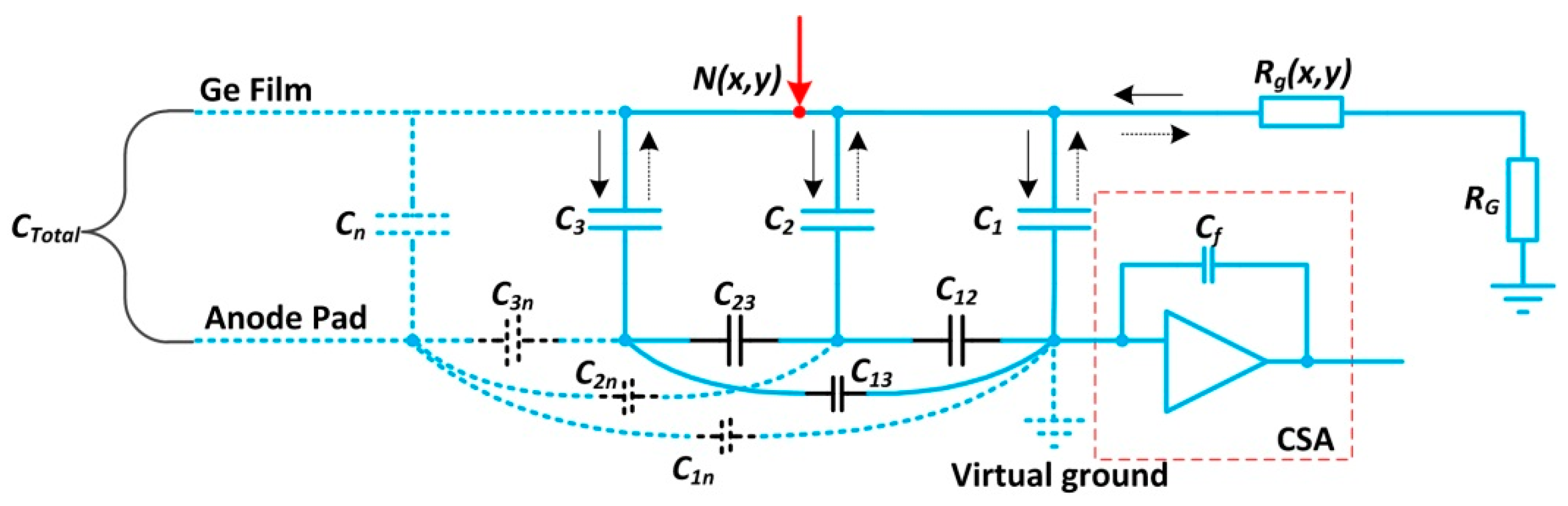
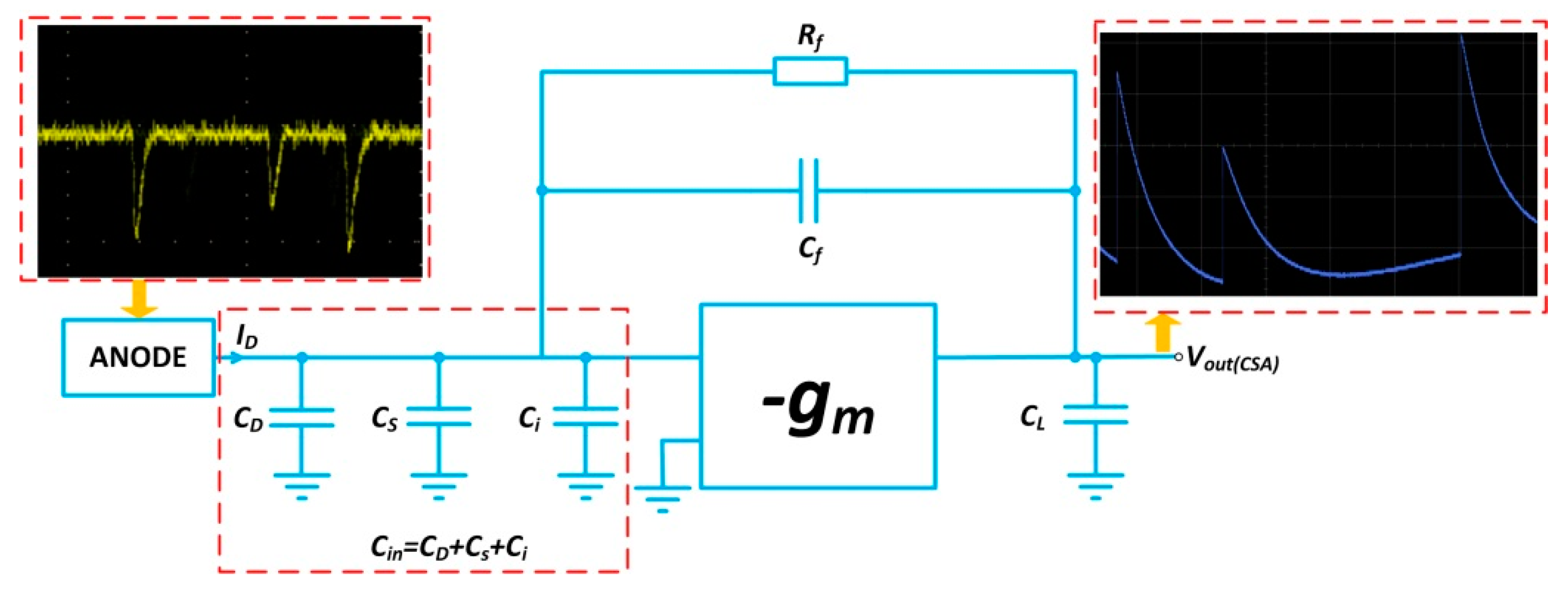
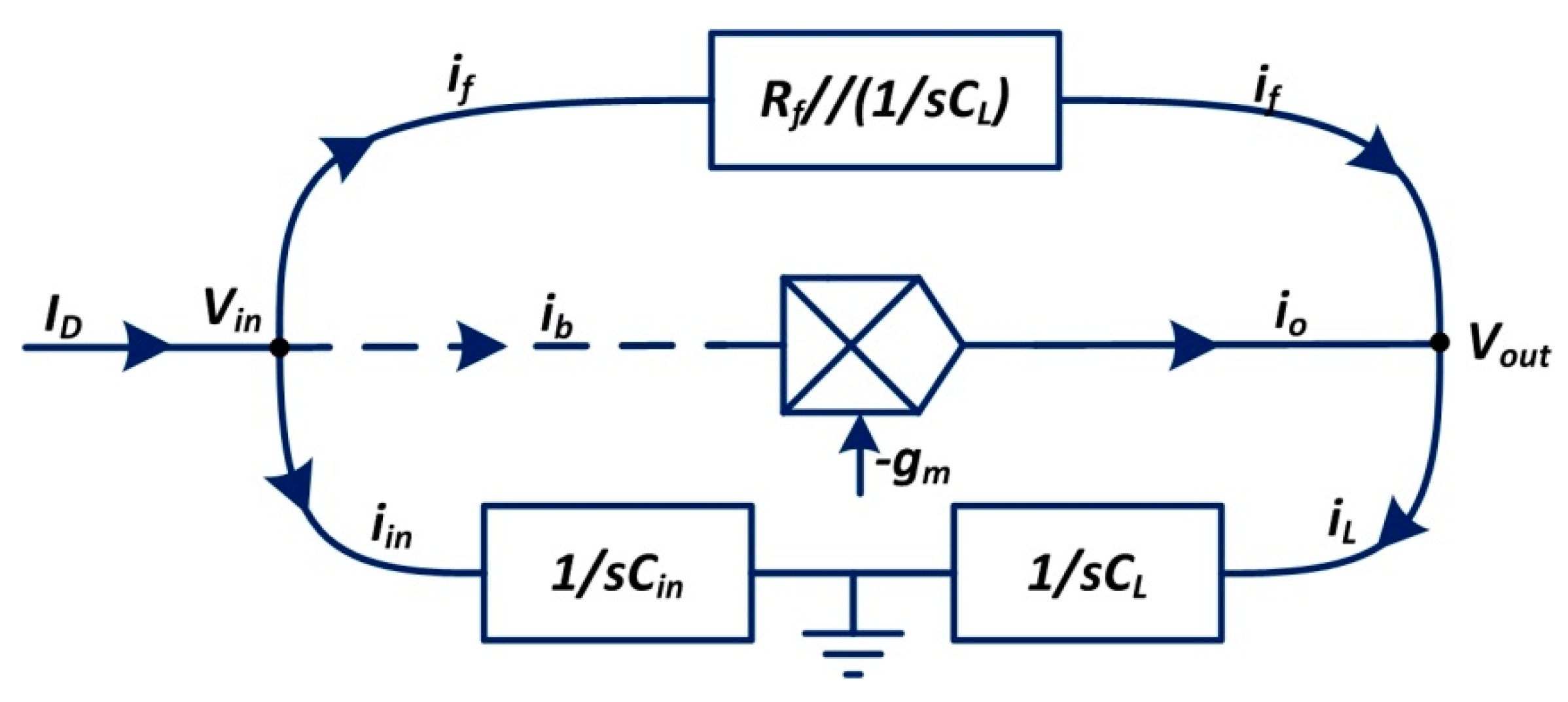
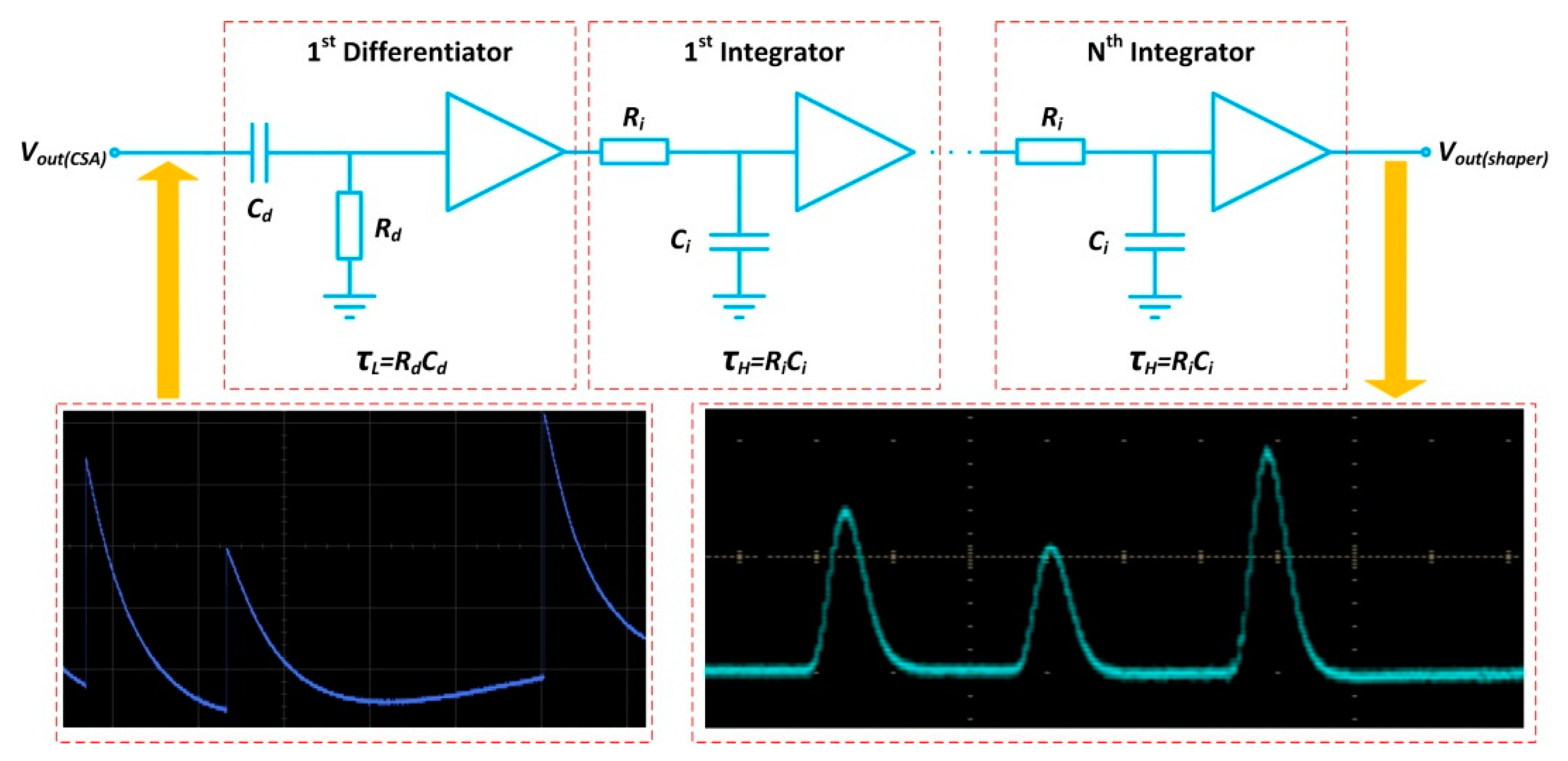
2.3. Response of Readout Circuits
3. Results and Discussion
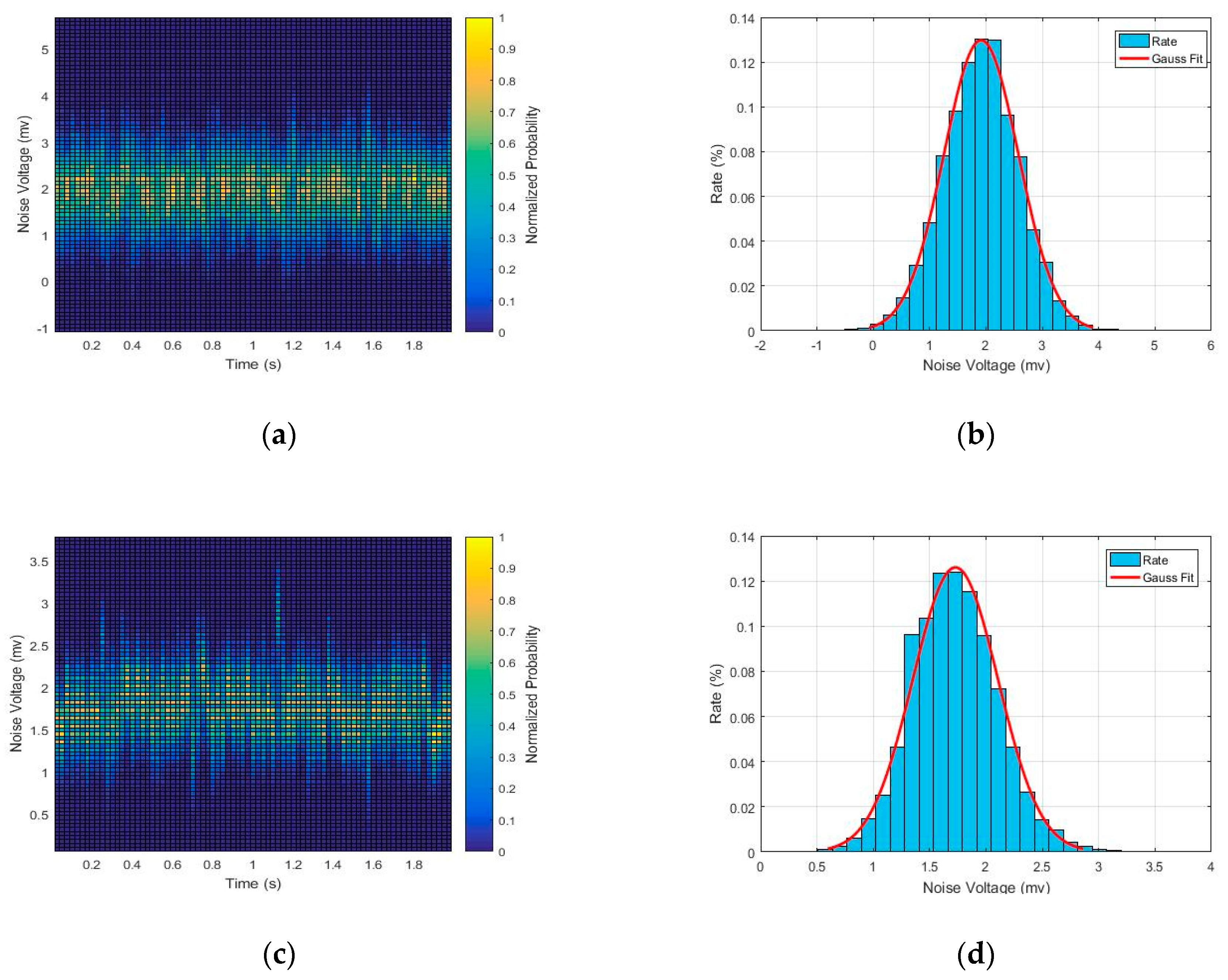
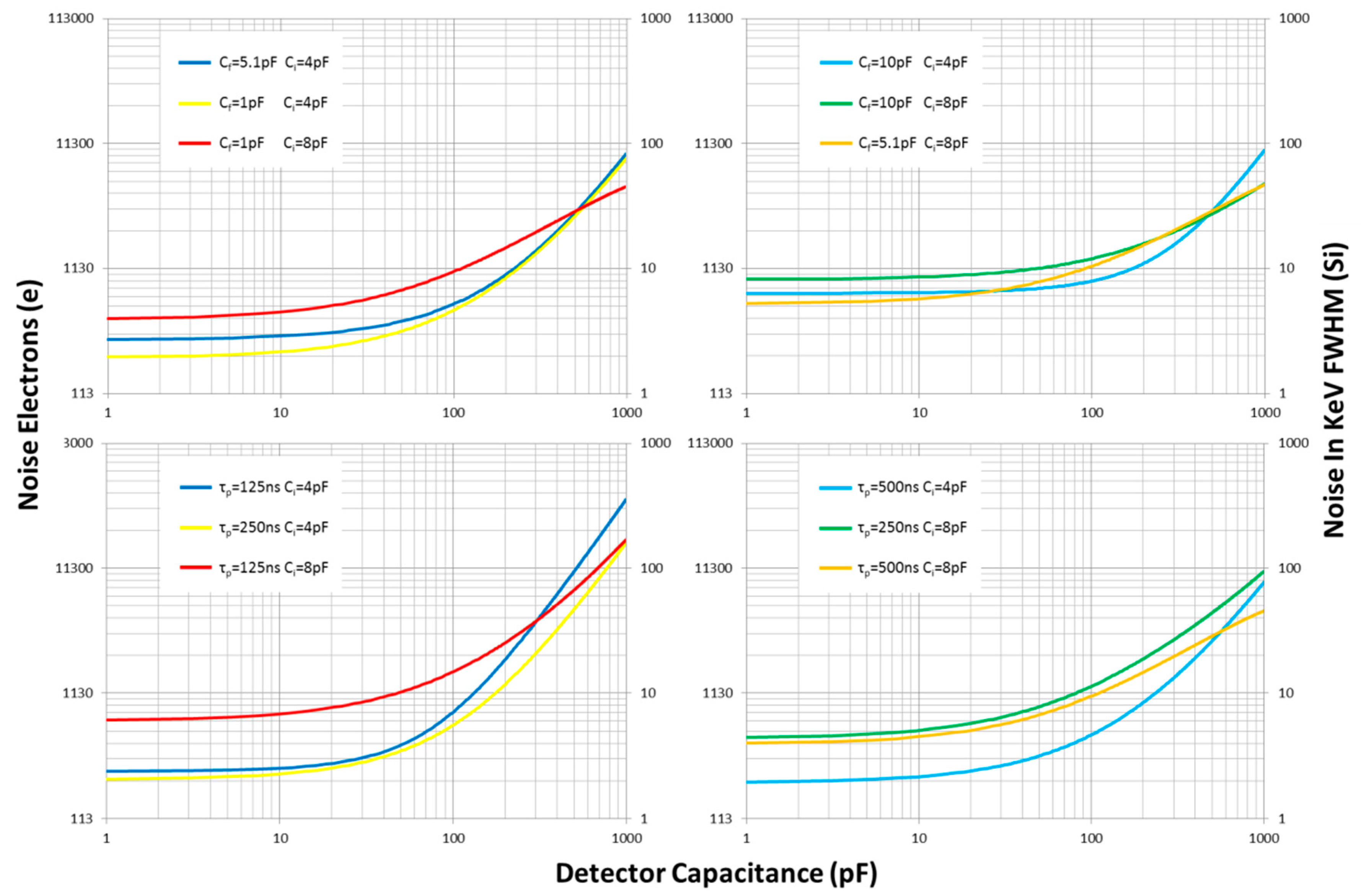
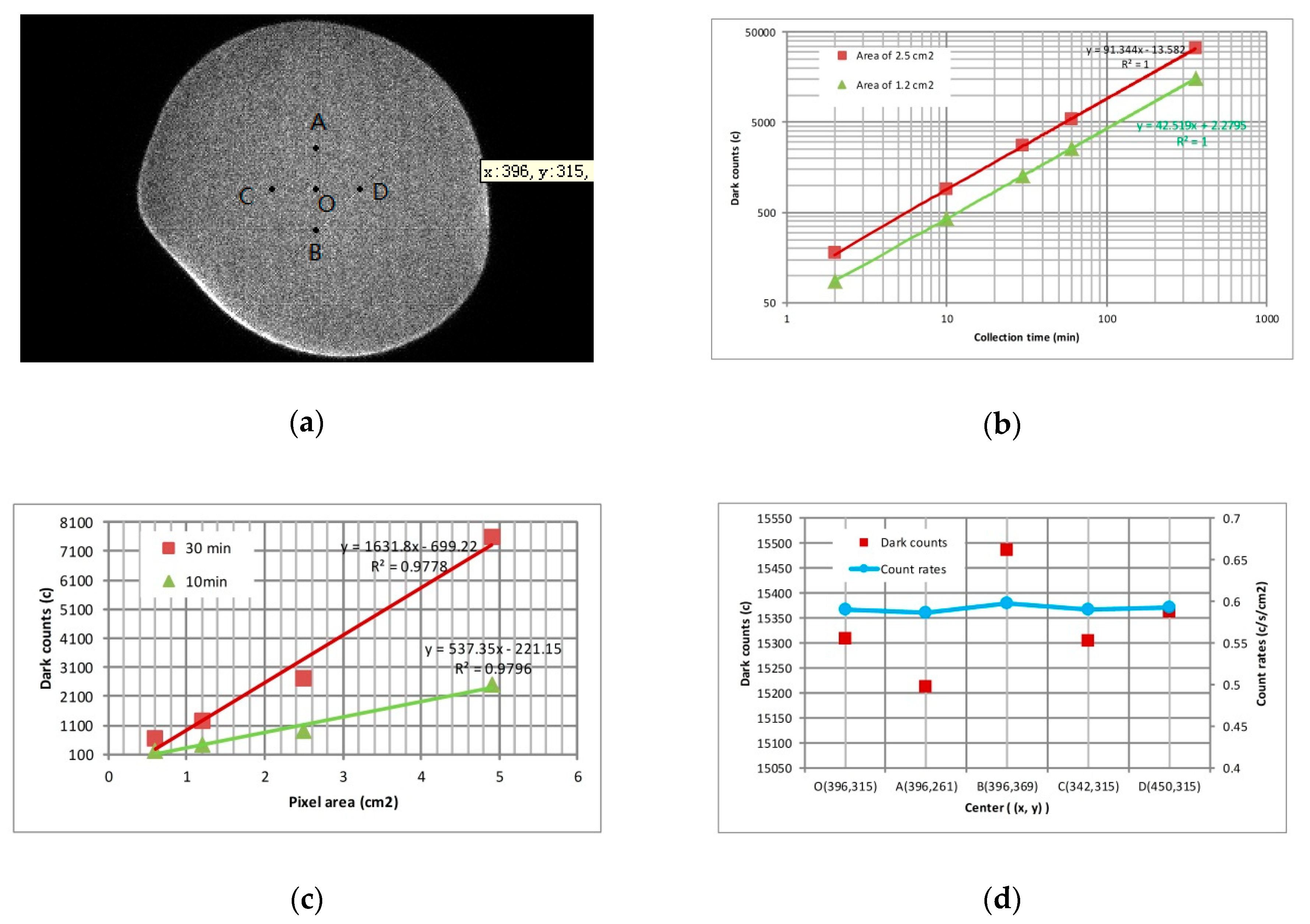
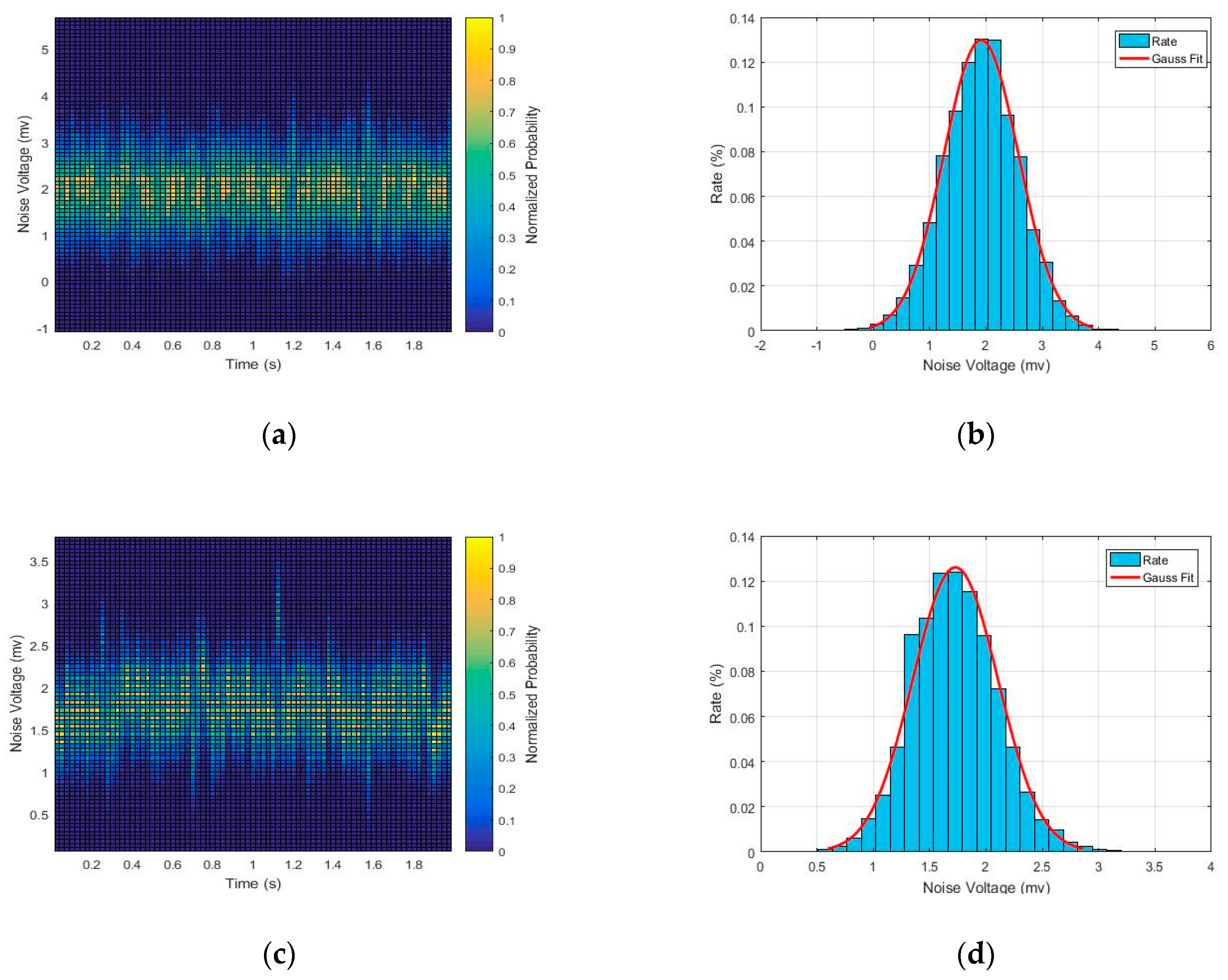
3.1. Noise Test
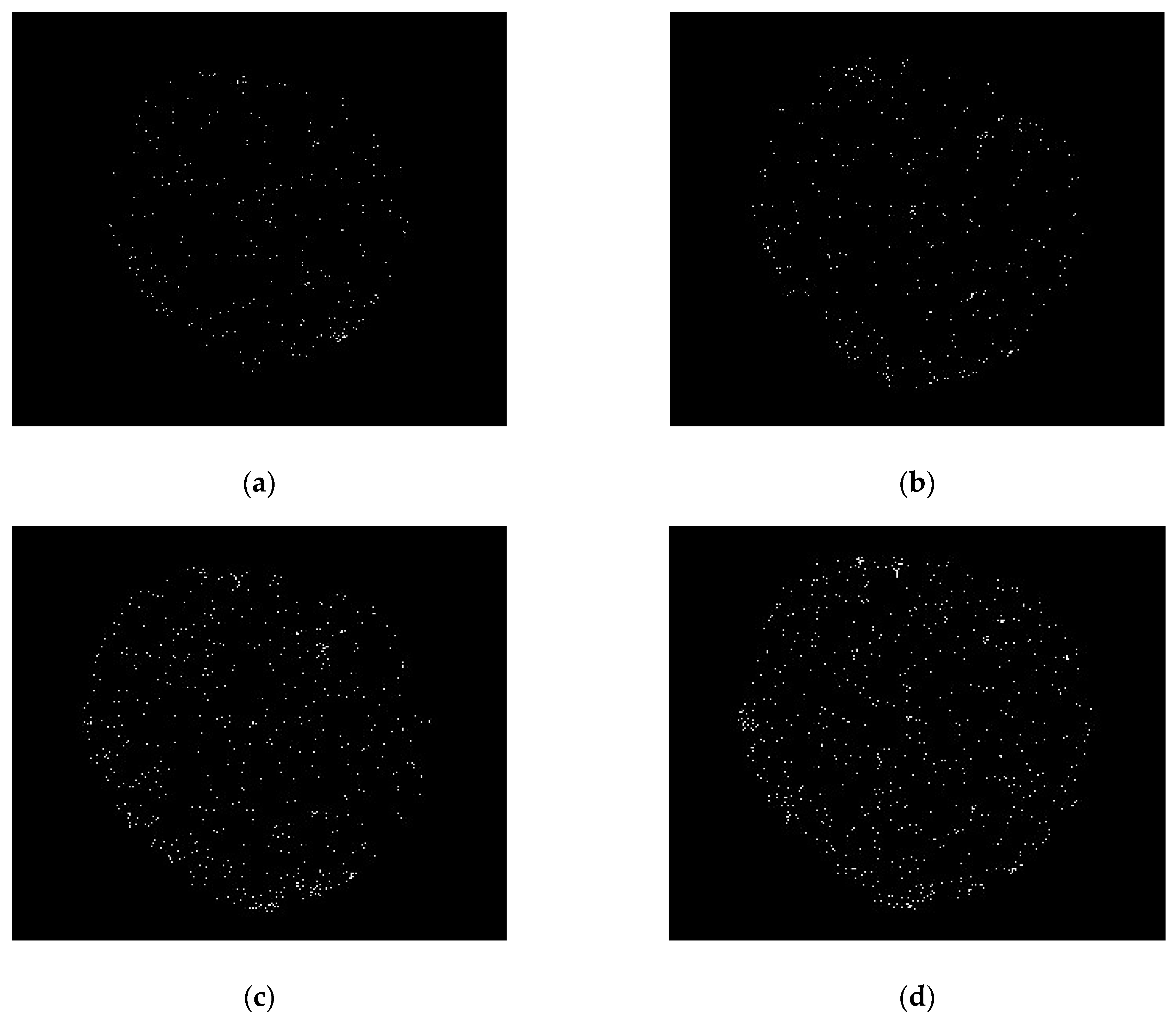
3.2. Characterization of Counting Rate Linearity
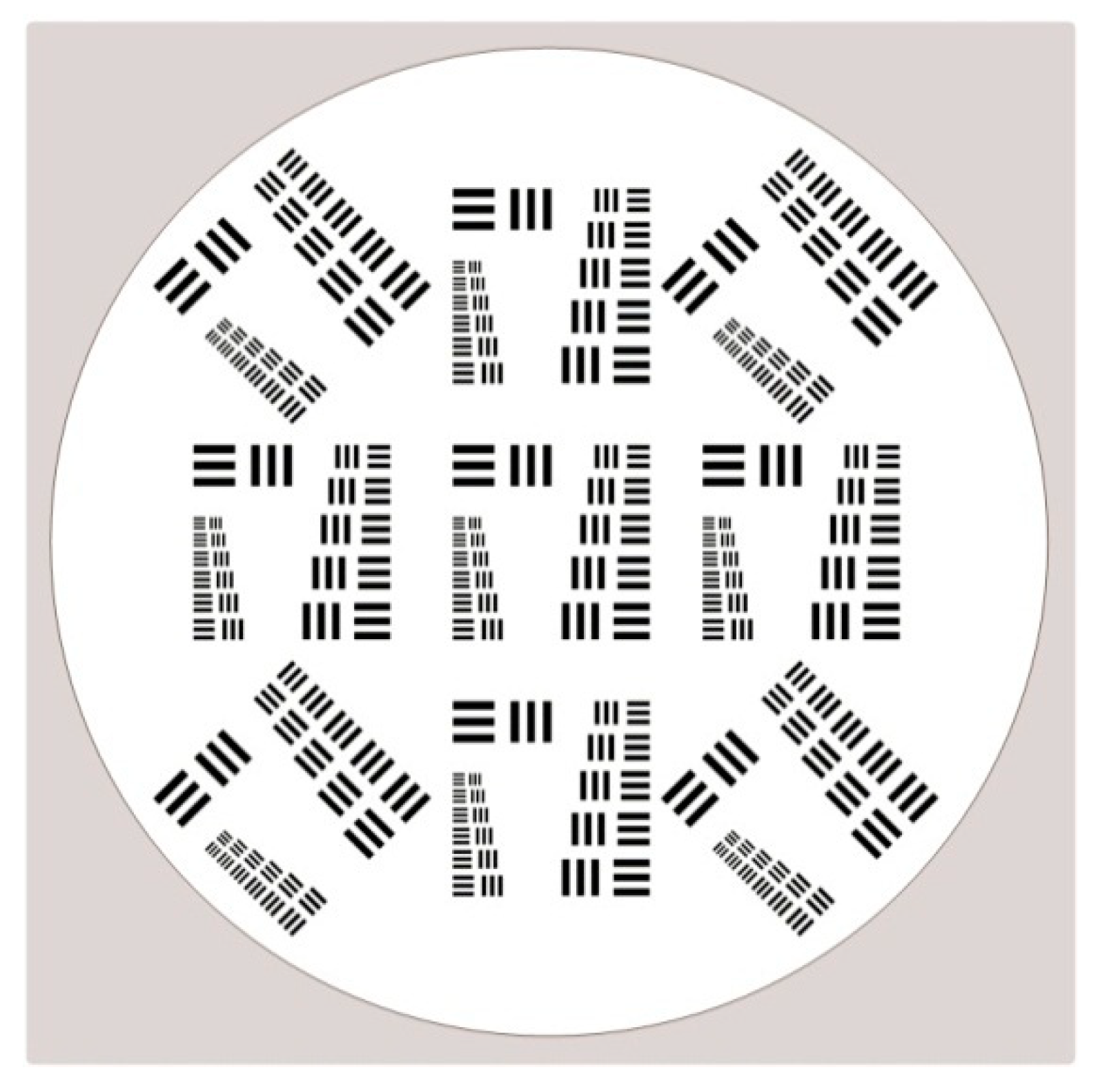
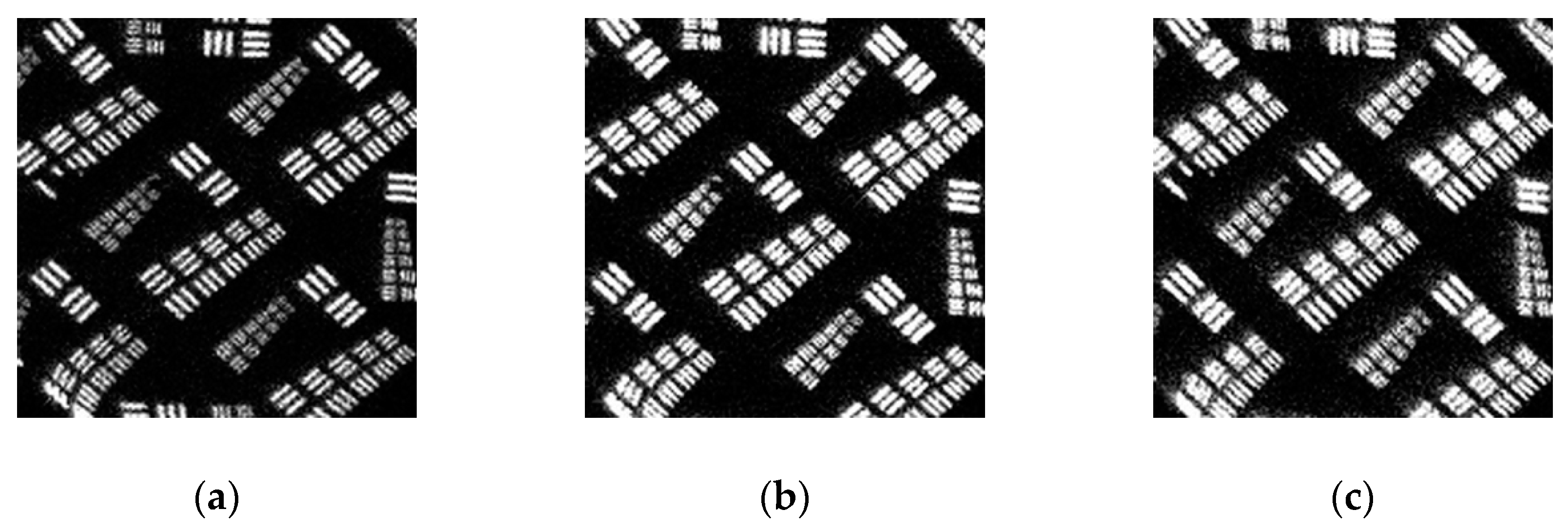
3.3. Spatial Resolution
3.4. Product Performance
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FUV | Far-Ultraviolet |
| MCP | Microchannel Plate |
| WSA | Wedge Strip Anode |
| CSA | Charge Sensitive Amplifier |
| EUV | Extreme Ultraviolet Camera |
| WAI | Wide-angle Aurora Imager |
| LBH | Lyman–Birge–Hopfield |
| FWHM | Full-Width Half-Maximum |
| ASIC | Application Specific Integrated Circuit |
| FPGA | Field Programmable Gate Array |
| OTA | Operational Transconductance Amplifier |
| OP-AMP | Operational Amplifier |
| FET | Field Effect Transistor |
| SNR | Signal-to-Noise Ratio |
| DAQ | Data Acquisition |
| ADC | Analog-to-Digital Converter |
| EINC | Equivalent Input Noise Charge |
References
- Aurora—Wikipedia. Available online: https://en.wikipedia.org/wiki/Aurora (accessed on 20 June 2020).
- Gérard, J.C.; Hubert, B.; Grard, A.; Meurant, M.; Mende, S.B. Solar wind control of auroral substorm onset locations observed with the IMAGE-FUV imagers. J. Geophys. Res. 2004, 109, A03208. [Google Scholar] [CrossRef] [Green Version]
- Lui, A.T.Y. Imaging global auroras in space. Light Sci. Appl. 2019, 8, 83. [Google Scholar] [CrossRef] [PubMed]
- Mende, S.B. Observing the magnetosphere through global auroral imaging: 2. Observing techniques. J. Geophys. Res. Space Physics 2016, 121, 10638–10660. [Google Scholar] [CrossRef]
- Bannister, N.P.; Bunce, E.J.; Cowley, S.W.H.; Fairbend, R.; Fraser, G.W.; Hamilton, F.J.; Lapington, J.S.; Lees, J.E.; Lester, M.; Milan, S.E.; et al. A Wide Field Auroral Imager (WFAI) for low Earth orbit missions. Ann. Geophys. Eur. Geosci. Union 2007, 25, 519–532. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Song, K.F.; Li, Z.H.; Wu, Q.W.; Ni, Q.L.; Wang, X.D.; Xie, J.J.; Liu, S.J.; He, L.P.; He, F.; et al. Development and calibration of the Moon-based EUV camera for Chang’e-3. Res. Astron. Astrophys. 2014, 12, 1654–1663. [Google Scholar] [CrossRef]
- He, H.; Wang, H.; Shen, C.; Zhang, X.X.; Chen, B.; Yan, J.; Zou, Y.L.; Li, C.L.; Jorgensen, A.M.; He, F. Imaging of plasmasphere by Chang’e 3. In Proceedings of the 2017 XXXIInd General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS), Montreal, QC, Canada, 19–26 August 2017; pp. 1–3. [Google Scholar]
- Zhang, X.X.; Chen, B.; He, F.; Song, K.F.; He, L.P.; Liu, S.J.; Guo, Q.F.; Li, J.W.; Wang, X.D.; Zhang, H.J.; et al. Wide-field auroral imager onboard the Fengyun satellite. Light Sci. Appl. 2019, 8, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J.; Ding, G.; Zhang, X.; He, F.; Yu, C.; Chen, B. The Wide-field Aurora Imager onboard FY-3D and the observations. AGUFM 2019, 2019, SH43D-3374. [Google Scholar]
- Paxton, L.J.; Schaefer, R.K.; Zhang, Y.; Kil, H. Far ultraviolet instrument technology. J. Geophys. Res. Space Physics 2017, 122, 2706–2733. [Google Scholar] [CrossRef] [Green Version]
- Unick, C.; Donovan, E.; Spanswick, E.; Uritsky, V. Selection of FUV auroral imagers for satellite missions. J. Geophys. Res. Space Physics 2016, 121, 10019–10031. [Google Scholar] [CrossRef] [Green Version]
- Magnan, P. Single-Photon Imaging for Astronomy and Aerospace Applications. In Single-Photon Imaging; Seitz, P., Theuwissen, A.J., Eds.; Springer Publishing: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Wiggins, B.B.; Desouza, Z.O.; Vadas, J.; Alexander, A.; Hudan, S.; Desouza, R.T. Achieving high spatial resolution using a microchannel plate detector with an economic and scalable approach. Nucl. Instrum. Methods Phys. Res. B 2017, 872, 144–149. [Google Scholar] [CrossRef]
- Wiggins, B.B.; Vadas, J.; Bancroft, D.; Desouza, Z.O.; Huston, J.; Hudan, S.; Baxter, D.V.; Desouza, R.T. An efficient and cost-effective microchannel plate detector for slow neutron radiography. Nucl. Instrum. Methods Phys. Res. B 2018, 891, 53–57. [Google Scholar] [CrossRef]
- Vallerga, J.; Raffanti, R.; Cooney, M.; Cumming, H.; Varner, G.; Seljak, A. Cross strip anode readouts for large format, photon counting microchannel plate detectors: Developing flight qualified prototypes of the detector and electronics. In Space Telescopes and Instrumentation 2014: Ultraviolet to Gamma Ray; SPIE Astronomical Telescopes + Instrumentation: Montréal, QC, Canada, 2014. [Google Scholar]
- Pfeifer, M.; Diebold, S.; Barnstedt, J.; Hermanutz, S.; Kalkuhl, C.; Kappelmann, N.; Schanz, T.; Werner, K. Low power readout electronics for a UV MCP detector with cross strip anode. J. Instrum. 2014, 9, 705–710. [Google Scholar] [CrossRef]
- Cretot-Richert, G.; Francoeur, M. Applications Expand for Photon Counting. Photonics Spectra 2014, 48, 43–46. [Google Scholar]
- Zhang, X.H.; Zhao, B.S.; Zhao, F.F.; Liu, Y.A.; Zhu, X.P.; Yan, Q.R. An ultraviolet photon counting imaging detector system based on Ge induction readout mode. Nucl. Instrum. Methods Phys. Res. B 2009, 610, 724–727. [Google Scholar] [CrossRef]
- Wiza, J.L. Microchannel plate detectors. Nucl. Instrum. Methods 1979, 162, 587–601. [Google Scholar] [CrossRef]
- Omote, K. Dead-time effects in photon counting distributions. Nucl. Instrum. Methods Phys. Res. B 1990, 293, 582–588. [Google Scholar] [CrossRef]
- Tremsin, A.S.; Vallerga, J.V.; McPhate, J.B.; Siegmund, O.H.W. Optimization of high count rate event counting detector with Microchannel Plates and quad Timepix readout. Nucl. Instrum. Methods Phys. Res. B 2015, 787, 20–25. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Yu, D.Y.; Liu, J.L.; Lu, R.C.; Cai, X.H. A charge sensitive spectroscopy amplifier for position sensitive micro-channel plate detectors. Rev. Sci. Instrum. 2014, 85, 106104. [Google Scholar] [CrossRef]
- Chen, L.; Ling, F.T.; Liu, Y.Z.; Li, F.; Jin, G. A FPGA-based pulse pile-up rejection technique for the spectrum measurement in PGNAA. In Proceedings of the 2016 IEEE-NPSS Real Time Conference (RT), Padua, Italy, 6–10 June 2016; pp. 1–3. [Google Scholar]
- Janesick, J.; Tower, J. Particle and photon detection: Counting and energy measurement. Sensors 2016, 16, 688. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.B.; Chen, L.H.; Li, Y. Thermal design and verification of transmission filter for wide angle aurora imager. Opt. Precis. Eng. 2014, 22, 3019–3027. [Google Scholar] [CrossRef]
- Precision Imaged Optical Components & Calibration Standards. Available online: https://www.appliedimage.com/wp-content/uploads/pdf/cdvFGl.pdf (accessed on 10 June 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | WAI | EUVC |
|---|---|---|
| Field of view | 134.43° × 133.24° | 14.7° (Circular) |
| Angular resolution | 0.34° | 0.08° |
| Sensitivity | 8.8 count s−1 Rayleigh−1 | 0.11 count s−1 Rayleigh−1 |
| Dark counts | 0.610 counts s−1 cm−2 | 1.000 counts s−1 cm−2 |
| Maximum counting rate | 350 kcps | 66 kcps |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.-W.; Song, K.-F.; Zhang, H.-J.; Yu, M.; He, L.-P.; Guo, Q.-F.; Wang, X.; Liu, Y.; Chen, B. Photon Counting Imaging with Low Noise and a Wide Dynamic Range for Aurora Observations. Sensors 2020, 20, 5958. https://doi.org/10.3390/s20205958
Han Z-W, Song K-F, Zhang H-J, Yu M, He L-P, Guo Q-F, Wang X, Liu Y, Chen B. Photon Counting Imaging with Low Noise and a Wide Dynamic Range for Aurora Observations. Sensors. 2020; 20(20):5958. https://doi.org/10.3390/s20205958
Chicago/Turabian StyleHan, Zhen-Wei, Ke-Fei Song, Hong-Ji Zhang, Miao Yu, Ling-Ping He, Quan-Feng Guo, Xue Wang, Yang Liu, and Bo Chen. 2020. "Photon Counting Imaging with Low Noise and a Wide Dynamic Range for Aurora Observations" Sensors 20, no. 20: 5958. https://doi.org/10.3390/s20205958
APA StyleHan, Z.-W., Song, K.-F., Zhang, H.-J., Yu, M., He, L.-P., Guo, Q.-F., Wang, X., Liu, Y., & Chen, B. (2020). Photon Counting Imaging with Low Noise and a Wide Dynamic Range for Aurora Observations. Sensors, 20(20), 5958. https://doi.org/10.3390/s20205958