1. Introduction
With the trend of global aging, various social problems have emerged one after another such as economic, political, and social development issues; population projections; and so on [
1]. A large number of countries are stepping up research on population aging [
2]. As the number of elderly people in hospitals and nursing homes surges, expectations for advanced systems that accurately alert them to dangerous motions and emergencies in real-time are increasing [
3], and the combination of security care and intelligent management can solve this problem. By developing artificial intelligence and leveraging big data, many everyday applications can be automated. [
4]. Although some nursing systems that focus on monitoring and physical condition measurement have been developed, there are still some requirements that have not been significantly satisfied, which shows that this research field has broad application prospects.
There are various forms of motion that need to be detected. Of these, falling is one of the most dangerous ones and should be paid attention to [
5]. It might cause serious consequences or severe sequelae such as fracture, soft tissue injury, and psychological trauma, making an impact on the mental and physical health of elderly. According to the World Health Organization (WHO), falls are the second leading cause of accidental deaths, with approximately 646,000 deaths each year, especially those over the age of 65, and 37.3 million falls occur each year and require medical attention [
6].
From the view of healthcare, shortage of medical personnel is another problem. The WHO reported that the global health workforce was 43.5 million in 2013 and it would be 67.3 million in 2030, however a shortage of the global health workforce was 17.4 million in 2013, and it would be 14.5 million in 2030 [
7,
8]. Moreover, the WHO stated that the population of over 60 would be more than 22% of the total of world population [
9]. These facts showed that the shortage of medical staff has been unsolved.
The increase in falls with aging is inevitable, and proper health care is important as well as prevention. It has a fatal adverse effect on the physical and mental health of the elderly and also increases the burden on families and society; therefore, it has become a central topic in geriatrics [
10,
11,
12]. To protect the physical and mental safety of the elderly and improve their living standards, it is necessary to have a system in place to take certain measures to track and analyze their daily motions. In the event of a fall, the emergency information should be sent to community caregivers or their family members as quickly as possible in order to ensure their safety, shorten the rescue time, and give them proper treatment [
13].
In this research, from the perspective of versatility and privacy, a fall detection method based on one low-resolution infrared array sensor is proposed. This sensor is operational in the dark, and the low resolution allows privacy to be preserved. The target of this research was to achieve the aims of human motion detection and send an alarm message when a dangerous situation occurred in a hospital or a nursing room since these are the places where the elderly particularly need to be cared for.
The main contributions of this study are as follows:
We proposed a motion detect method which can mainly detect falling in consideration of privacy preservation for elderly people using low resolution infrared array sensor. In our proposed system, one sensor can cover a 4 × 5 m area for detection, and the area can be expanded by using more than one independent sensor. It means that our system has high flexibility and scalability.
We proposed to adapt a three-dimensional convolutional neural network as a suitable classifier for the proposed system. It could detect an occurrence of falling with very high accuracy of 98.8% and F1-measure of 94.9% in real-time, which were 1% and 3.6% higher than those of a long short-term memory network, respectively. It means that the proposed system could achieve construction of an alert system for the health care and support caretakers.
This paper is organized as follows:
Section 2 provides an overview of relate work about fall detection.
Section 3 shows materials and methods of proposed system.
Section 4 explains detail of experiments, and
Section 5 shows the result of the experiments. After that,
Section 6 discusses the results. Finally,
Section 7 concludes this study.
2. Related Work
There mainly exist two kinds of fall detection systems: systems based on portable devices and systems based on external sensing devices. First, portable or wearable device-based methods require sensors such as accelerometers and gyroscopes to be attached to parts of the human body, and these sensors are used to detect the acceleration and angular velocity of specific parts of the body [
14]. Mathie et al. used an accelerometer attached to the waist to detect falls [
15]. The movement of the human body from standing to falling causes acceleration to increase suddenly, so the fall can be judged accordingly. Bianchi et al. introduced a barometric pressure sensor as a tool for height measurement to improve the existing human fall detection technology based on accelerometers. The device is worn on the waist, records the acceleration and barometric pressure data, then processes the data, and finally uses the trained hierarchical decision tree model to perform human fall detection [
16]. Haoyu et al. considered the risk level of a fall including the direction of the fall and whether it was supported by a hand by constructing a three-layer structure with machine learning algorithms based on wearable sensors [
17].
Of the methods based on external sensing devices, camera-based methods take advantage of the rapid development of image processing technology. Computer vision-based motion detection takes a video of a person’s motion with an optical camera and uses advanced image processing algorithms to determine whether there is a frame with a motion feature to detect [
18]. De Miguel et al. developed a fall detection system based on a camera for the elderly that applies various algorithms to extract better features and used a K-nearest neighbors algorithm to achieve recognition [
19]. Yu et al. used an enhanced one-class support vector machine as a recognition algorithm and obtained features including the differences of barycenter position and orientation of a person over a time period as input [
20]. Merrouche et al. used a depth camera to detect a fall by combining human shape and movement. They analyzed shape features and movement of the human and tracked the human head through particle filter while expressing movement by the covariance of the center of mass distance over time [
21]. There are other types of external sensing devices. Chelli et al. and Wang et al. used Wi-Fi to detect human motions with a support vector machine (SVM) [
22,
23]. Mokhtari et al. developed a fall detection system based on an ultra-wide band (UWB) radar with an SVM [
24]. Sadreazami et al. and Liang Ma et al. also used a UWB radar for fall detection with a convolutional neural network (CNN) [
25,
26].
During actual application, different living environments and their limitations should be considered to ensure the convenience, reliability, and practicability of the system. For instance, wearable devices inevitably lead to decreased comfort. Moreover, in private areas such as restrooms and bathrooms, privacy should be protected, which means that the application of an optical camera is restricted in such situations. When designing the system, these problems should be considered carefully [
27].
According to a survey, infrared sensors have been used for human detection [
28], target tracking [
29], and motion recognition [
30]. High-resolution sensors and infrared sensor arrays are commonly used in motion detection but are insufficient for privacy protection and have a high price. Some studies which focused on fall detection using low resolution infrared sensor are summarized in
Table 1. The accuracy of each study is discussed in
Section 7. Among them, Tao et al. proposed a privacy-preserved fall detection system using an infrared ceiling sensor network [
31], which was similar to our proposed system. The resolution of the sensors used is quite low, just 4 × 5 pixels, so they adopted a sensor network, which made the system complex.
3. Materials and Methods
This section explains the sensor used in this study, system construction, system flow chart of proposed methods, data processing of thermo images, the method of target existence detection and positioning, and two kinds of classifiers selected in this study.
3.1. Infrared Array Sensor
An infrared sensor is a kind of sensor that uses the physical properties of infrared light to make measurements. Infrared sensors are usually used for non-contact temperature measurement, gas composition analysis, and non-destructive testing, and are widely used in the fields of medicine, military, space technology, and environmental engineering [
42].
Commonly, infrared sensors are divided into two types: near-infrared (NIR) and far-infrared (FIR). Compared with the NIR sensor, the FIR sensor has a stronger anti-interference ability. Compared with other infrared sensors such as passive infrared detectors and single-point infrared sensors, infrared array sensors can provide more comprehensive information including position information, movement states, surface temperature, and others [
43].
In this research, from the perspective of versatility and privacy, one detection method based on a low-resolution infrared array sensor is proposed. In the proposed motion detection system, the low-resolution infrared array sensor can protect the privacy of the elderly, which means, it can be used in some private places such as locker rooms and restrooms. This method can effectively recognize elderly people’s fundamental motions and detect their emergencies.
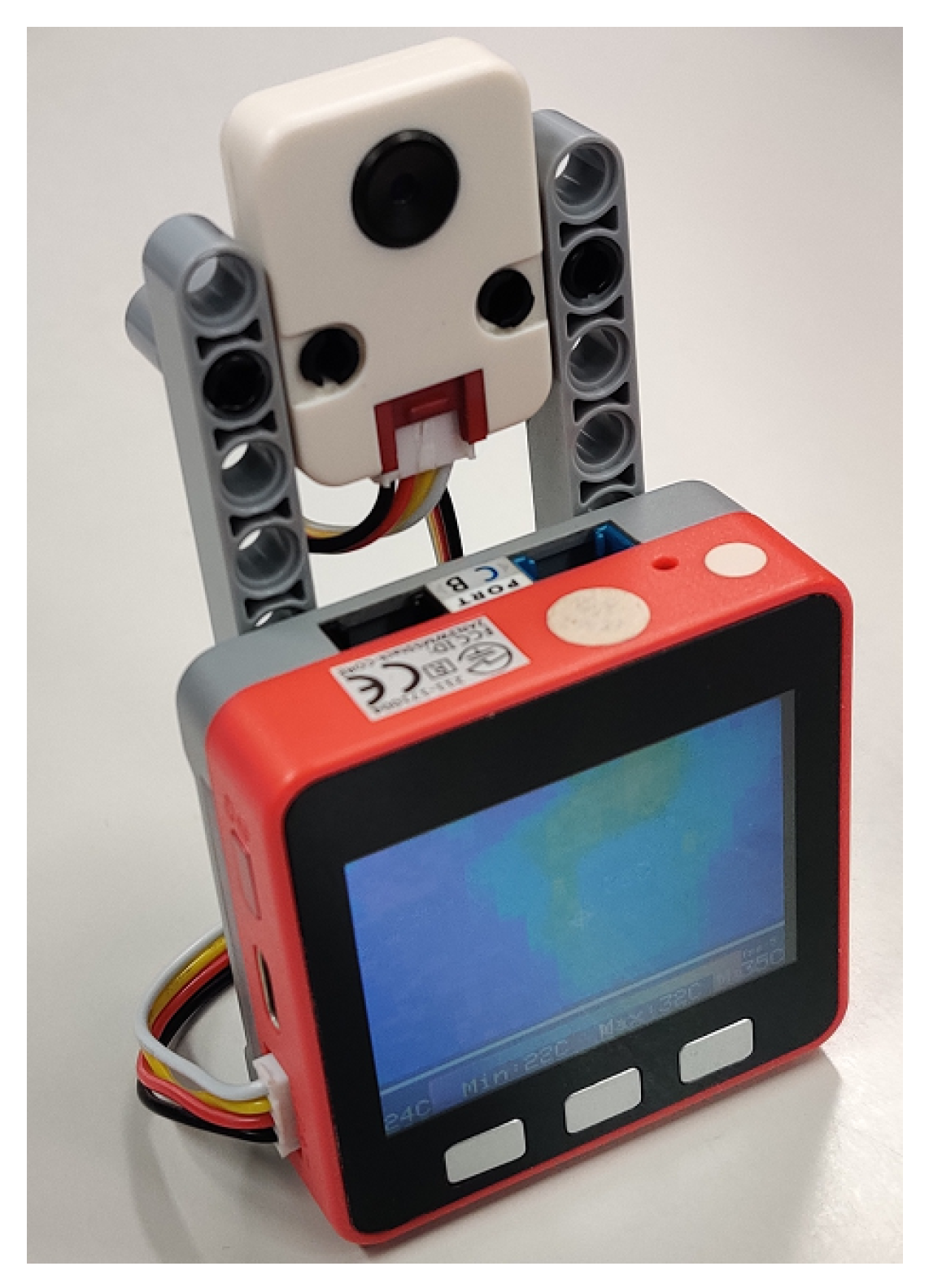
A far infrared thermal sensor named MLX90640, manufactured by Melexis, was applied in this research [
44]. The 32 × 24 thermopile elements in the sensor can detect infrared radiation of objects in the detection area and return a low-resolution thermal image that reflects the temperatures of the objects [
32]. The normal working temperature of the sensor varies from −40 to 85 °C, which means that this sensor may perform well in all common conditions. The sampling rate of the sensor is programmable up to 64 Hz, which means that this sensor can be used for real-time detection [
45,
46]. An I2C compatible digital interface is provided for data transmission with a transmission frequency of up to 1 MHz. In this research, the sensor was connected to a micro-controller unit, M5Stack including a Wi-Fi module, through a GROVE I2C port as shown in
Figure 1. The data collected by the M5Stack can be sent to a PC with Wi-Fi via routers in a separate location such as a nurse station or a staff operation room in a remote monitoring system. The data gathered in the PC was continuously processed to detection a fall, and when detected, the system announce an alert to staff.
In this system, the acquisition frequency of the sensor was set to 15 Hz considering the data size to be processed because the data processing time can be relatively short.
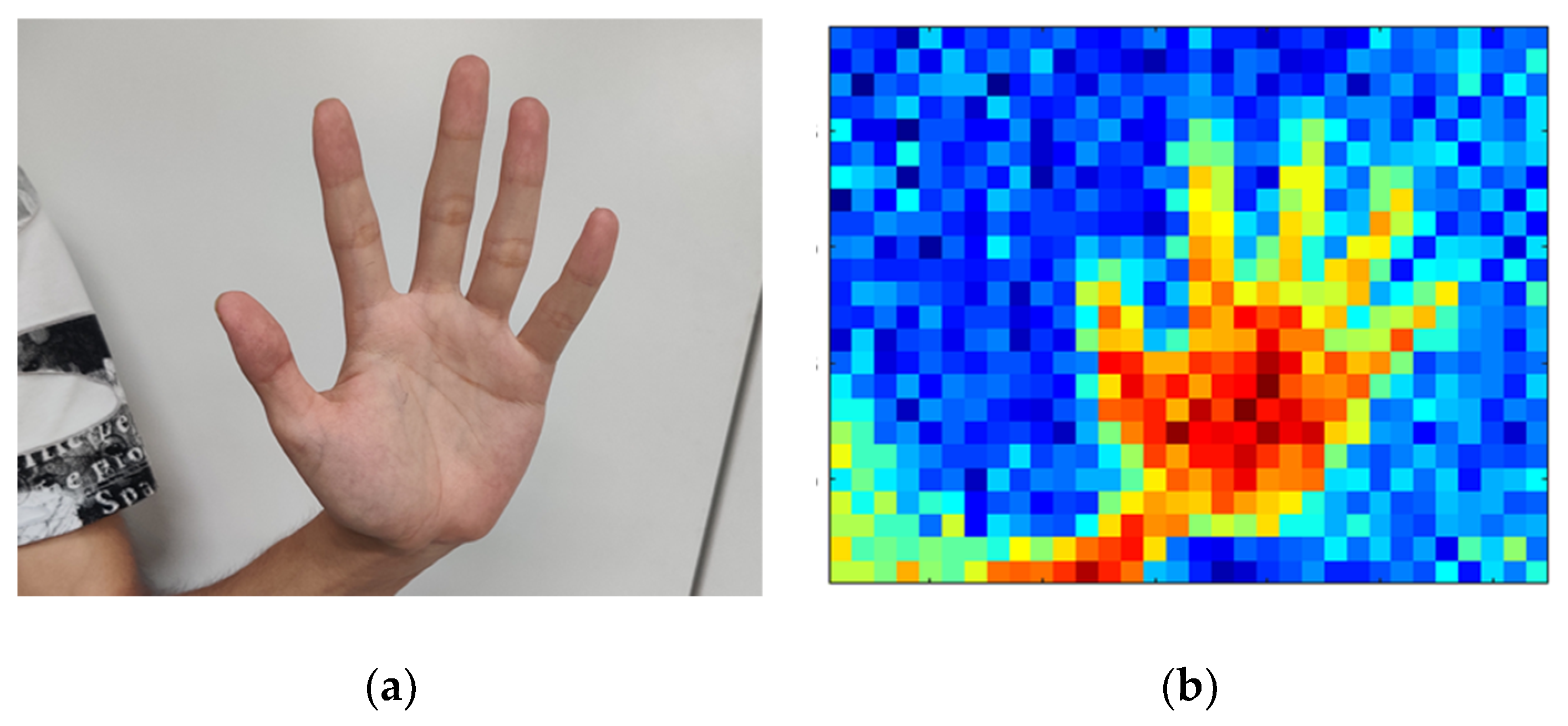
An example of an infrared array image is shown in
Figure 2. Here,
Figure 2a shows the real hand image and
Figure 2b shows the RGB colored infrared array image. Originally, the infrared image is grayscale (8 bits); however, here it is shown in color for clear and easy viewing.
3.2. System Flow Chart of the Propsed Method
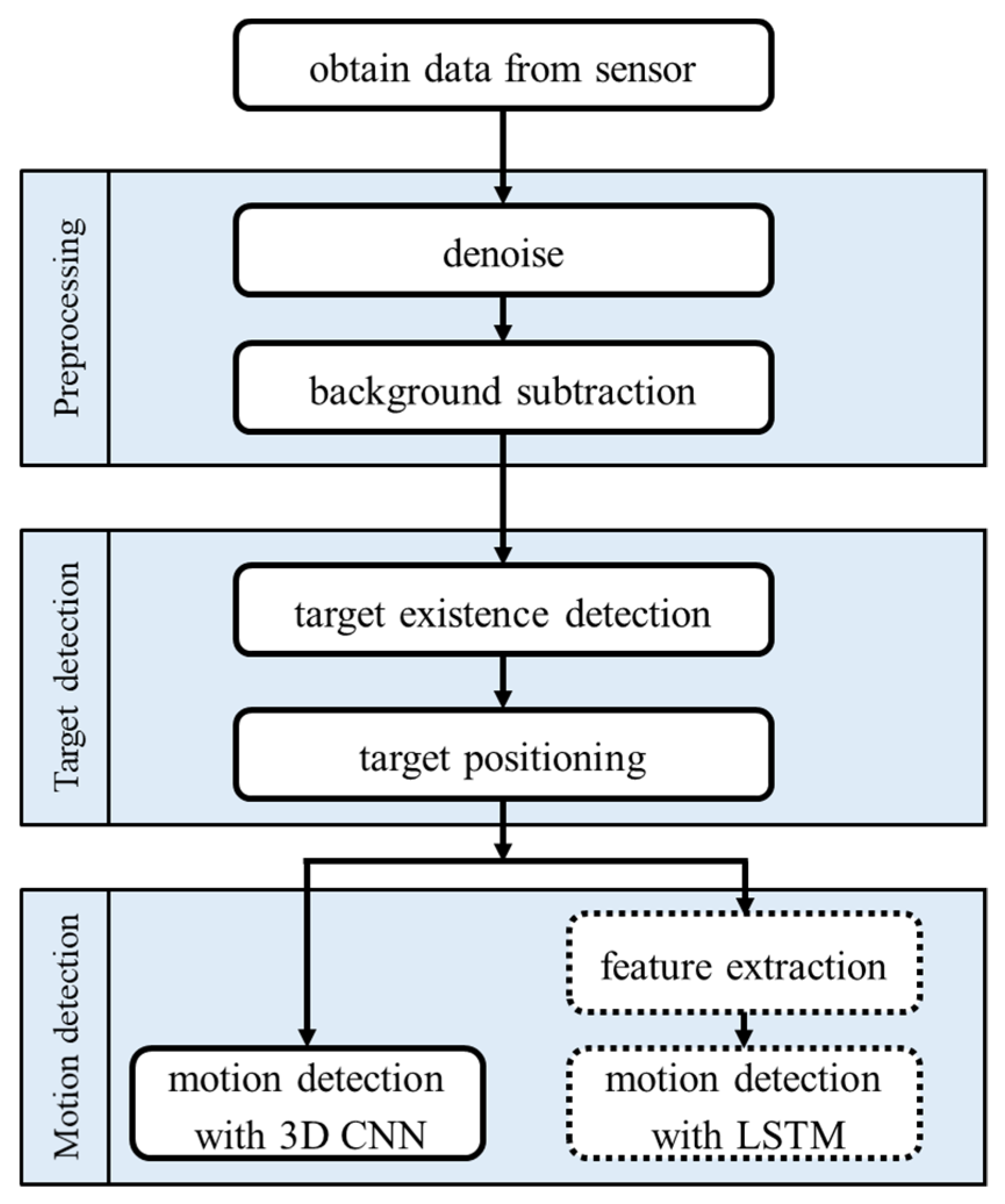
The flow chart of the proposed motion detection system is shown in
Figure 3. The processing methods are mainly divided into three parts: preprocessing, target detection, and motion detection. In the first part, the raw data frames obtained from the sensor are denoised, and then separated into two parts, background and objects. The background can be removed to extract an area of the objects. In the next part, methods of target presence detection and target location are used for target detection. Finally, in the last part, a three-dimensional convolutional neural network (3D CNN) [
47] is applied to motion detection to deal with the time series image data. A long short-term memory (LSTM) network with feature extraction is also applied for comparison.
3.3. Data Preprocessing
After the data frames are collected from the sensor, preprocessing including denoising and background subtraction is executed. In consideration of the noise distribution. Gaussian filtering, which is a linear smoothing filter, has been commonly used to reduce noise in image processing [
48], was chosen. In this research, the data size and noise intensity were considered when determining the filter; therefore, the smallest size filter shown in Equation (1) is sufficient.
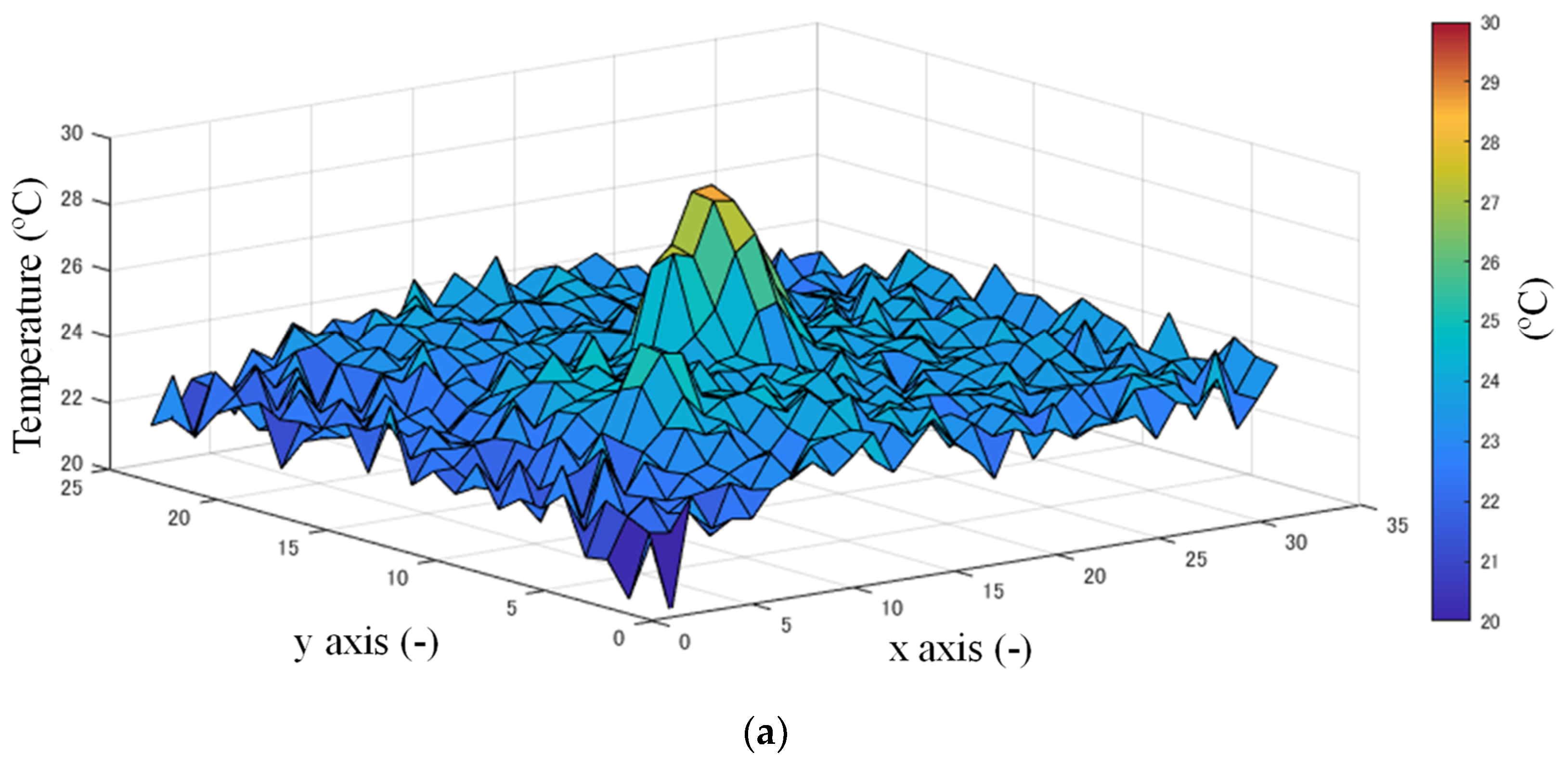
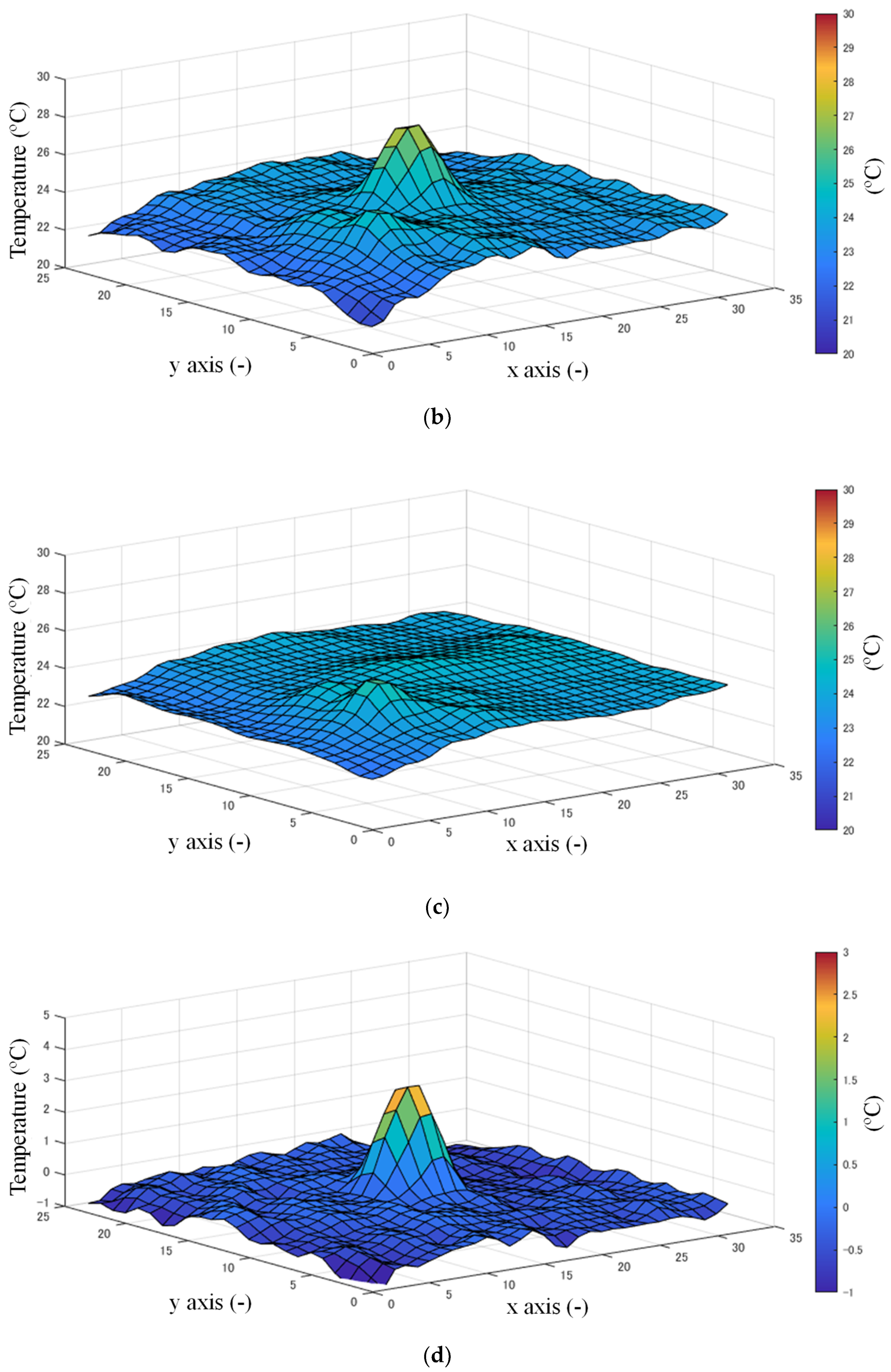
Figure 4a shows a typical frame of raw data where the target exists. Data after the Gaussian filtering is shown in
Figure 4b. After denoising, background subtraction is executed to extract the target. It is a common method used to record some frames when there is no target in the area, and these data are regarded as the stable background.
In real applications such as wards of a hospital, there is usually some electronic equipment that heats when operational, such as heart rate monitor devices, which may be detected and judged as a human and cause false detection. To deal with this problem, background subtraction was applied. The distribution of the data of the background is shown in
Figure 4c.
In general, non-human items do not move frequently, so we collected a relatively long series of data and used the average as the initial background, renewing by
where
means the background in the
i-th frame and
means the foreground data of the
i-th frame. The weight
is a constant decided by the application environment. This background subtraction and renewing method shows suitable performance without much calculation cost.
Figure 4d shows the data of
Figure 5 after background subtraction.
3.4. Target Existence Detection and Positioning
After the background subtraction, firstly, the target detection is performed for each frame. It can be assumed that temperatures of a human are higher than those of the environment and emit more heat radiation, so the human image consists of spots with higher temperatures in the thermal image. In the application environments of hospitals and nursing rooms, a few moving non-human items can emit a large amount of heat radiation, so the aim of human detection can be simplified as the detection of larger heating spots. First, the local highlighted temperature pixel and the 5 × 5 neighborhood pixels are selected. Then, the selected pixels with temperatures at least 1 °C higher than the background are marked. When the size of a marked area is more than or equal to
pixels, it indicates that this area can be detected as a human [
44], as follows:
where,
is a threshold for human detection. In
Figure 5, the highest temperature pixel of the detected target is shown as a black point. Here,
is also decided based on the target size in the system environment.
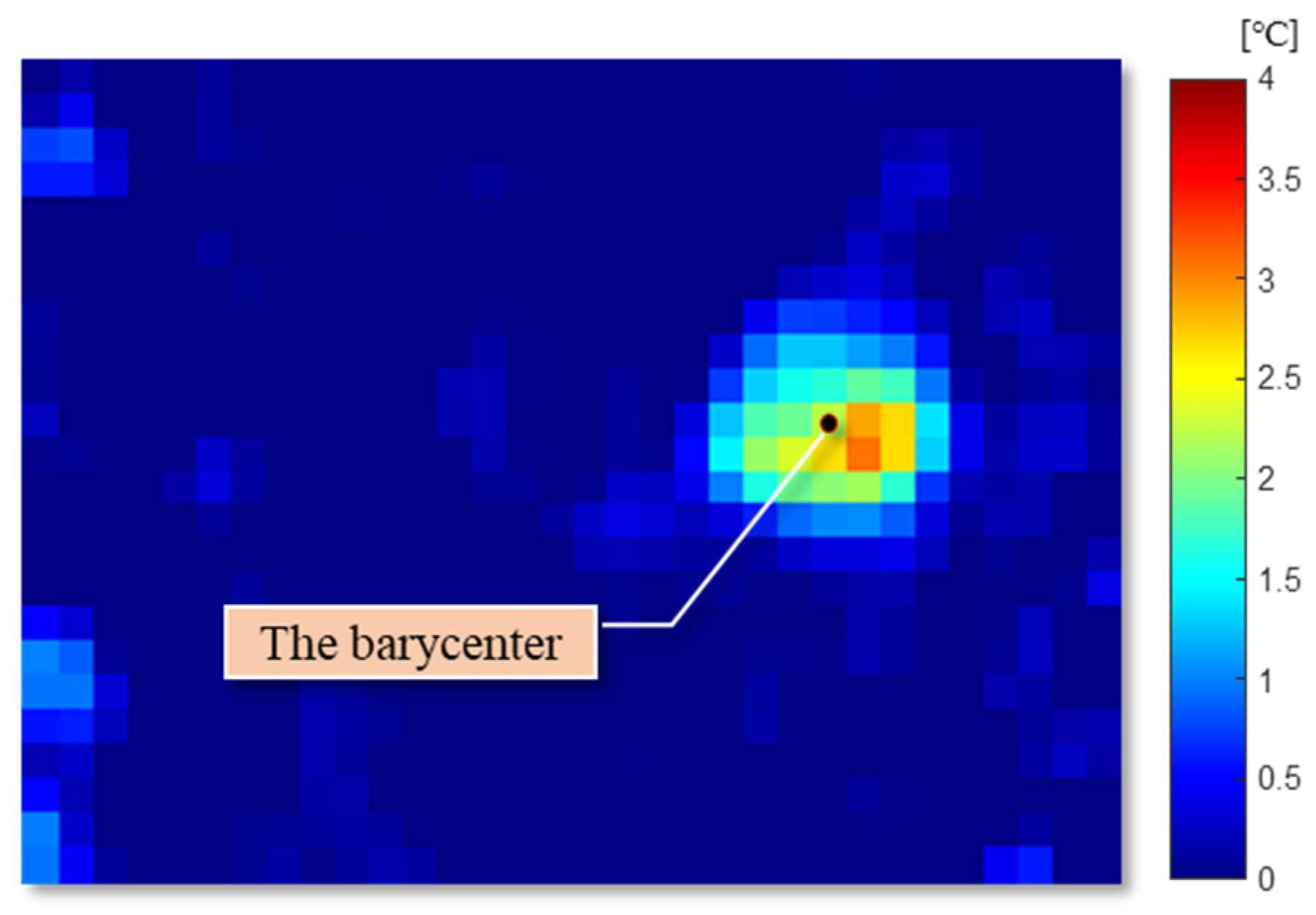
The representative pixel with the highest value is not always the middle point of a human, because it is influenced by clothes, gestures, and noise. To correctly express the position of the target and obtain better performance, the target position should be corrected. The barycenter of the neighborhood in the local highlighted pixels is calculated by Equation (4).
where
is the coordinate of the barycenter in this frame of the image,
is the value on point
. This process is repeated with the renewed middle point and the same neighborhood size until the barycenter stop moving.
Figure 6 shows the adjusted center point of the target with a black point [
45]. The barycenters obtained from sequential frames can be used to detect a moving direction, a moving distance, and a speed of the target in this system.
The motion detection is based on the result of the target tracking. When there are multiple targets in the frame, motion detection can be performed accordingly, and when one target is judged to disappear from the area, the motion detection for the target is stopped.
3.5. Classifiers Used in the System
3.5.1. Three-Dimensional Convolutional Neural Network
A traditional two-dimensional convolutional neural network (2D CNN) for video images with continuous frames can easily lose the information on the target time axis, resulting in low recognition accuracy. To address this problem, a method based on a 3D CNN is proposed [
49]. Three-dimensional CNN has received considerable attention over the years for use in consecutive frames understanding. The main reason for its success is the effective extraction of spatio-temporal features from consecutive frames. The 3D convolution kernel is used to extract temporal and spatial features to capture the motion information of the object [
50,
51].
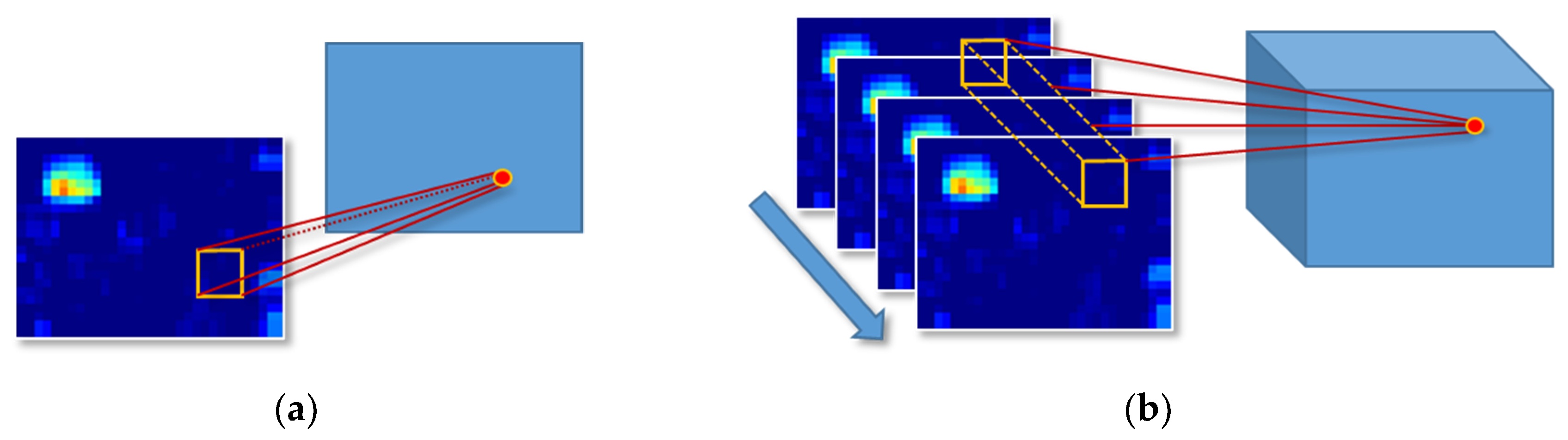
In
Figure 7a, the traditional 2D CNN uses a 2D convolution kernel to convolve the image. The time and space feature information in the continuous figures can be better dealt with by using a 3D CNN. The 3D convolutional neural network includes a convolutional layer, a pooling layer, a fully connected layer, and a softmax layer. The 3D convolutional layer expands the dimensions of the convolutional neural network based on the basis of the 2D convolutional neural network. The size of the convolution kernel and the filter size of the pooling layer in each layer of the network structure are all upgraded to three dimensions. The output of the convolutional layer is cube data. In the fully connected layer, neurons are connected to all neurons in the adjacent layer. The input of the fully connected layer converts the feature space to a neuron vector and then uses matrix multiplication to flatten the input feature vector. The input of the previous layer flattens the convolved 3D feature vector to a neuron vector. The final output layer is the softmax layer, and the last neural vector will calculate the probability of each category. In
Figure 7b, the 3D CNN uses a 3D convolution kernel to perform convolution operations on the image sequence (video) [
52,
53]. The time dimension of the convolution operation in the figure is three, that is, the convolution operation on three consecutive frames of images. The 3D convolution in
Figure 7b forms a cube by stacking multiple consecutive frames, and then the convolution operation is performed using the cube [
54]. In this structure, each feature map in the convolutional layer is related to multiple adjacent consecutive frames in the previous layer, which is how it can capture motion information. The value of a certain position of a convolution map is obtained by convolving the local receptive field of the same position of several consecutive frames in the previous layer [
55].
The flow chart of the 3D CNN classifiers applied in this system is shown in
Figure 8. In this research, the 3D CNN has a structure as follows:
A convolutional layer with 32 filters and 5 × 5 × 5 cube size for each filter;
A ReLU layer to complete the activation;
A max-pooling layer with a cube size of 3 × 3 × 3;
A fully connected layer with 128 points;
A ReLU layer with 50% dropout to avoid overfitting;
A fully connected layer with 8 points;
A softmax layer and a classification layer.
Each parameter is decided according to the complexity of the target and the number of classes [
46]. The effect of convolutional layers is convolving the input and the result is passed to the next layer. The number of free parameters can be manifestly reduced by the convolution operation, allowing it possible that the network to be deeper with fewer parameters. The vanishing gradient and exploding gradient problems that occur during backpropagation in traditional neural networks are prevented by applying regularized weights over fewer parameters. Pooling layers can combine the neuron clusters outputs into a single neuron just at one layer to reduce the dimensions of the data in the next layer, reducing the risk of overfitting. In our research, a pre-test was performed to choose the best size of convolution kernel and pooling window by comparing detection accuracy. In the pre-test, 50 fall data were gathered from each of the 10 participants as a dataset, and 80% of the dataset was used as training, and 20% was used as testing.
3.5.2. A Long Short-Term Memory
An LSTM network has a structure used to process sequence data that changes with time, space, and other factors. The LSTM network can solve the long-term dependence of the data model, that is, the time-based dependence of data. In continuous frame data, the LSTM network predicts the time-series sequence data of the future frame based on the previous sequence data, and expresses the spatio-temporal characteristics in a vector, as input of the cascaded an LSTM unit. The output of the LSTM unit contains the spatio-temporal information. The LSTM network adds a forgetting unit to the structure of a recurrent neural network (RNN) to solve the problem of gradient disappearance and gradient explosion during long sequence training, making it perform better in longer sequences [
56]. The LSTM network replaces hidden and output layer nodes with memory cells based on the RNN, which consists of input gates, forget gates, and output gates to control the update of the memory state vectors [
57,
58]. It can alleviate the problem of gradient loss during recursive neural network training.
Although the nature of the LSTM network originally takes advantage in prediction problems, some studies used the LSTM network or hybrid methods with it as a classifier for time series data of human motions [
34,
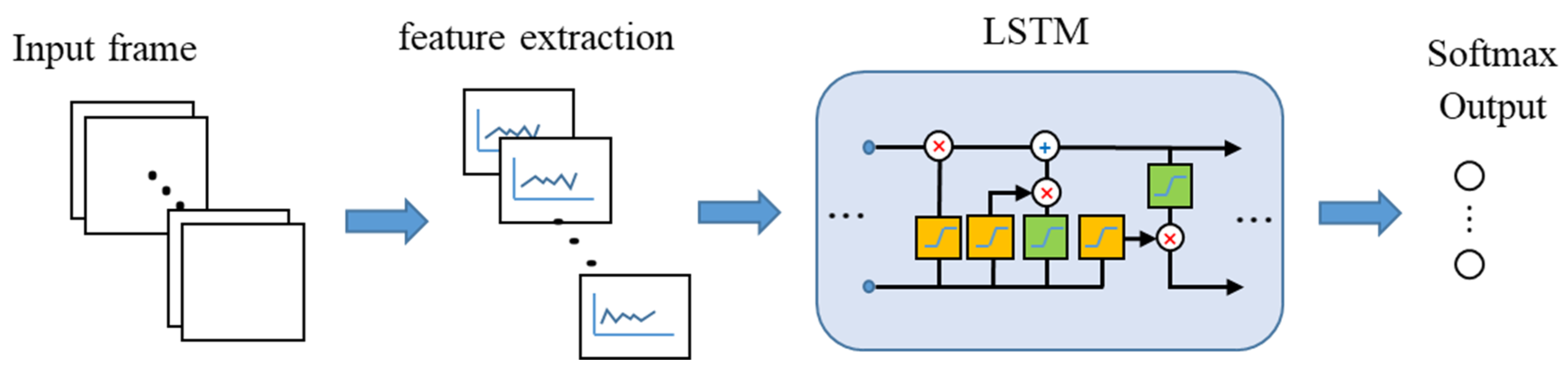
59]. In this research, an LSTM network was used with 128 hidden neurons, 6 dimensions at each time step, and a fully connected layer with 8 hidden neurons. Here, the time step size is the number of frames. Considering the characteristics of human motions, six features were extracted and input into the LSTM network. The flow chart of the LSTM network is shown in
Figure 9.
Before obtaining features, the Otsu method is applied to separate the target from the complete picture [
60]. The Otsu method is an efficient algorithm for binarizing images automatically obtaining a threshold from a bimodal situation, which divides the image into two parts, the background and the target, according to the grayscale characteristics of the image. After that, six features are extracted for detection: a moving distance, an area size, a change rate of area size of the target, the highest temperature, the average temperature, and a directional distribution ratio.
Among them, the change rate of area size is calculated by dividing the area size of the target in the frame by that of the previous frame as follows:
The directional distribution ratio is calculated from directional distribution of the target. This is a spatial statistics algorithm that calculates lengths of the ellipse in the
x and
y directions by centering on the average center of the element space distribution, thereby defining the axis of the ellipse containing the element distribution [
61]. This feature is defined as the ratio between the longer axis and the short one as shown in
Figure 10.
The equation to calculate the directional distribution ratio is as follows:
where
and
represent the length of the longer axis and shorter axis of the detected ellipse, respectively.
4. Experiment
This section explains the experimental environment and setting, dataset of the target motions, and experimental ethics.
4.1. Experiment Environment
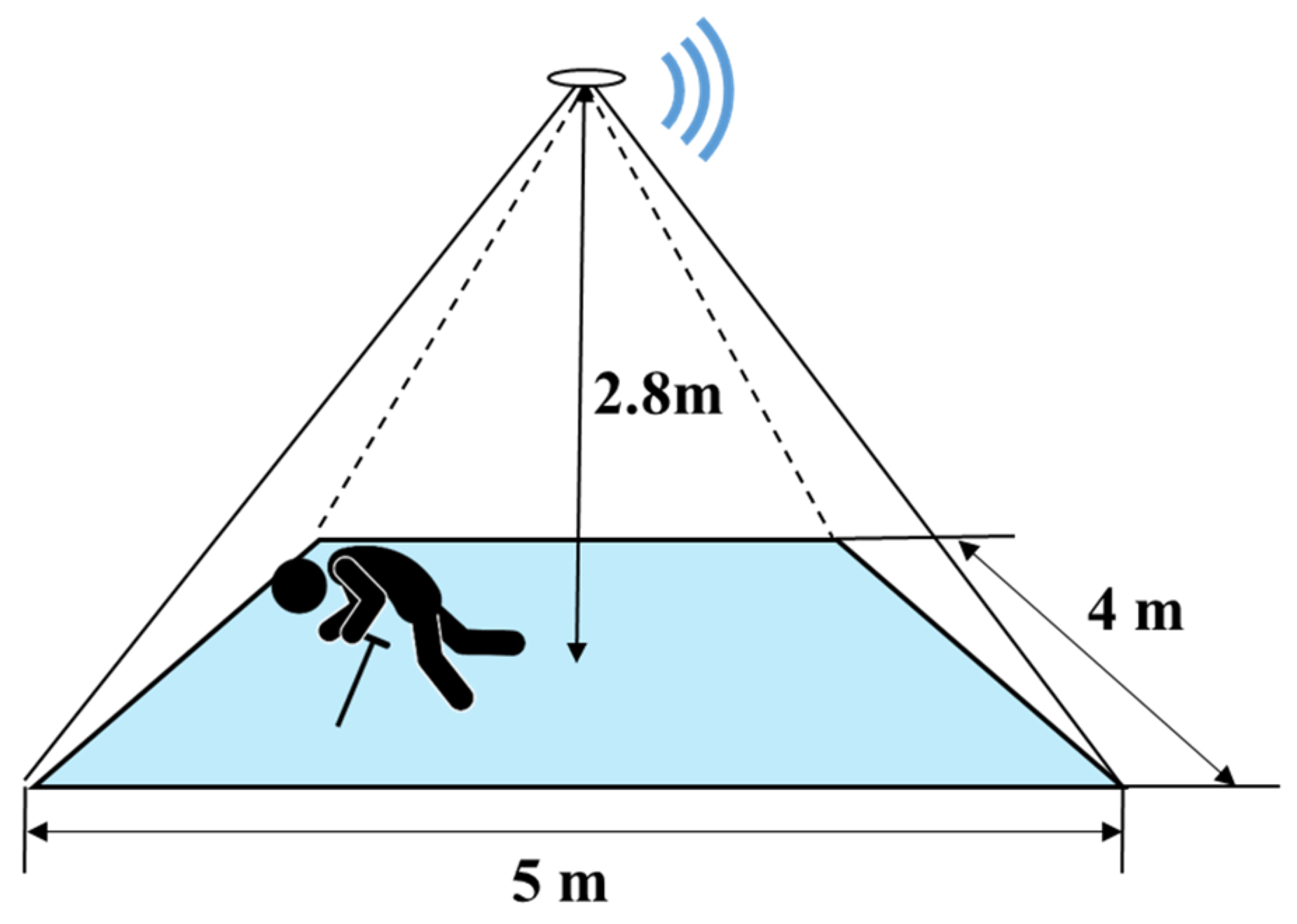
The sensor with a visual angle of 110° × 75° was attached to the ceiling of the room above the center of the detection area, as shown in
Figure 11. The experiments were conducted in an area of which size is 4 m × 5 m. In addition, the experiment environment was complex as it contained chairs, desks, and computers, an accurate simulation of the actual application environment. As the figure shows, the height of the experiment room was 2.8 m, which is a common height of the intended application environments such as hospitals and nursing rooms.
During the experiments, the environment temperature was set around 25 °C, which was a comfortable condition for people and is common in real application conditions. All the participants were asked to make the target motions that were detected in the proposed motion detection system by following their habits.
4.2. Motion Dataset
In this motion detection research, there were eight target motions, as shown in
Table 2, and each motion was recorded for 3 s to obtain motion frames. It was repeated 50 times to construct a dataset. Among them, the motion type ‘one motion’ means that this motion started at the beginning of the frames and finished by the end of the frames. The motion type ‘static motion’ means that this motion started at the beginning of the frames and kept the posture until the end with slightly movement. The motion type ‘continuous motion’ means that this motion continued from start to end of the frames with changing direction randomly.
A total of 16 participants’ data were collected, which means that 800 sets of data were collected for each motion. During the experiment, the participants were asked to perform corresponding actions in different directions in the detection area. For static movements, like sitting and standing, the participants were asked to hold for five seconds. For other dynamic actions, the participants were required to follow their habits. In all the motions, the experiments were performed many times in different positions of the detection area to ensure the diversity of data obtained throughout the experiments.
4.3. Experiment Ethics
The risk of experimenting with elderly people is prohibitively high. As the resolution of the infrared array sensor used in this system is relatively low, it can be supposed that the characteristics of the data acquired from young people are roughly similar to those of the elderly. Therefore, the participants in this study were all in their twenties.
It was required to obtain fall motion data from the experimenters, which might be dangerous. Therefore, the safety of the participants was considered. During the experiment, a sofa and a large sponge pad were prepared to protect the experimenters.
All participants gave their informed consent for inclusion before they participated in the study. The study was conducted in accordance with the Declaration of Helsinki, and the protocol was approved by the Ethics Committee of H29-230.
5. Results
This section explains calculation setting and cross-validation results of two classifiers, selection of input frame number, computation time of training and testing for two classifiers, and application to multi-target detection.
5.1. Cross-Validations and Results
In this research, datasets from 16 participants were collected from the infrared area sensor. After gathering the data, a series of data processing methods such as noise reduction and background removal were performed. However, it is unclear how many frames of data can accurately represent a motion suitable for one detection. Hence, 15 frames were tentatively set to the sequential data length. The 15 frames extracted from the sequential frames were directly input into the 3D CNN to detect a motion. In the LSTM network, after calculating the six features, a 6 × 15 feature matrix was used for detection.
In this system, the parameter of Equation (2) was set to 0.999 by considering the frame rate of the sensor, and the parameter of Equation (3) was set to 8 by considering the target size in the actual data. In the training processes of both classifiers, the learning rate was set to 0.001, and the number of maximum epochs was set to 100.
In order to improve the versatility and reliability of the system, multiple experiments were used to examine the effects of individual differences. The detection performance was evaluated using commonly used cross-validation [
62]. The cross-validations were performed on data from 14 participants for training and data from two participants for the testing. This process was repeated eight times by changing the combination of two testing data set (8-fold cross-validations). For the experiments, the results and the correct answer rates of every motion under the LSTM network and 3D CNN are shown in
Table 3 and
Table 4, respectively.
Table 5 shows the average, maximum, and minimum correct answer rates of each motion for the 3D CNN cross-validation.
5.2. Input Frame Namber Selection
A human motion is a continuous process involving a change of body status. From the observation of the motions in the experiment, all the motions other than ‘walking’ could take 0.7 to 1 s from the start to end of the motion. This means that, in the obtained data at 15 Hz sampling rate, the motion appeared within 15 frames. In order to confirm the proper input frame number between 10 and 20 frames were tested for comparison. The result of this experiment is shown in
Figure 12.
5.3. Computation Time
The computation time of each classifier at the 15 frames input data with and without a graphics processing unit (GPU) for the cross-validations in
Section 5.1 is shown in
Table 6. The calculations were executed on a laptop PC with an Intel i7-4710HQ CPU (max: 3.5 GHz) and an NVIDIA GF850M GPU. The LSTM network, with or without a GPU, was six to nine times faster than the 3D CNN.
5.4. Multi-Target Detection
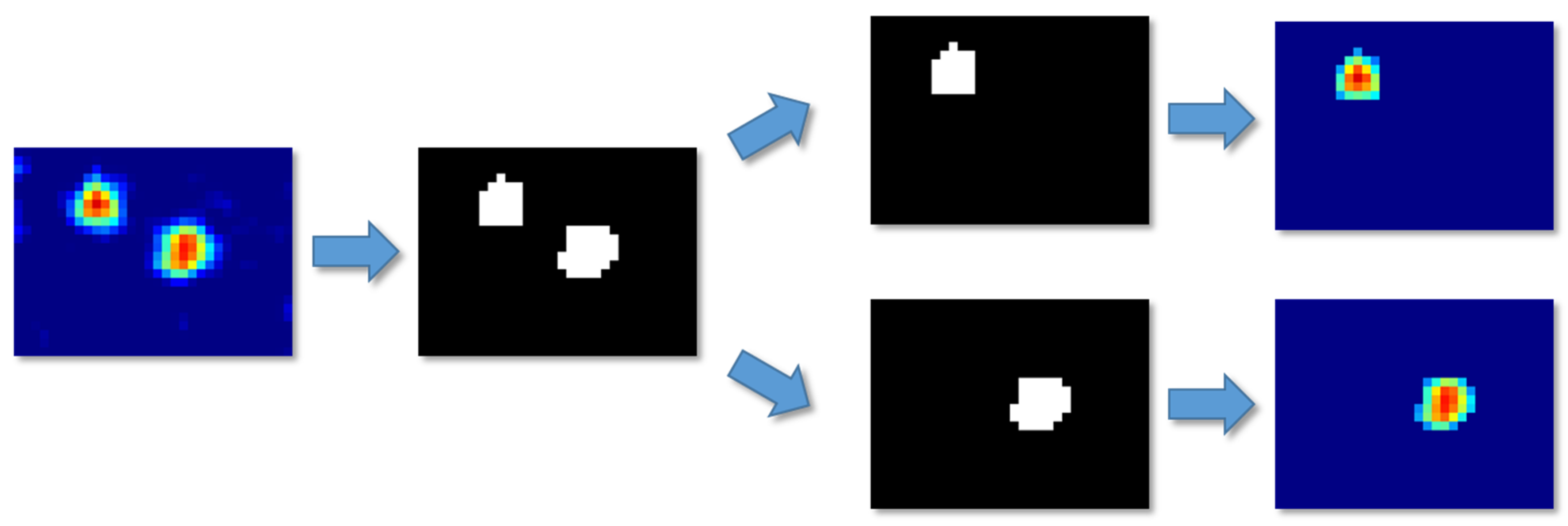
In the actual application of the system, it is very likely that multiple targets will exist in the detection area at the same time. Therefore, by using the Otsu method, the number of targets can be counted from a binarized image. The areas of different targets in the image were divided into the different images with the background of the lowest temperature, and then motion detection was performed for each image as shown in
Figure 13.
Data of two and three targets in the detection area were obtained to conform the capability of the system for multi-target situations. In total, 100 kinds of situations for two and three targets, in which one target fell while the others were walking, were processed and classified with the 3D CNN. The results are shown in
Table 7.
6. Discussion
In this section, we discuss correct answer rates of motion detection in terms of for each motion and frame rates, performance metrics and comparison result with other studies, and limitation of the proposed system.
6.1. Ccorrect Answer Rates of Motion Detection
- (1)
Each motion detection
As seen in the results shown in
Table 3, the average correct answer rate of the LSTM network for eight kinds of motions in this research was 82.5% for 16 participants. It can be concluded that the LSTM network performs well in the classification of the proposed eight motions, and especially for the motion of falling, the accuracy rate is over 92%. However, some of the correct answer rates could not reach 80%. The reason for these results is that the six extracted features cannot contain enough information for the classifier to distinguish the eight motions. As seen in the results in
Table 4, the average correct answer rate for the 3D CNN of the eight motions in this research was 94.2% for the data of 16 participants. It can be concluded that the 3D CNN can perform better than the LSTM network in the classification of the eight motions, and automatically extract space and temporal information from the original image data. However, in some cases, the falling was misclassified as walking. The reason for these results is probably that among eight motions, falling and walking have more variety of movements than the others.
In
Table 5, for each motion, the difference between the average and the minimum is obviously larger than the difference between the maximum and the average. The reason could be that a few participants’ motions were much different from the others’, resulting in a large part of the motion being divided into other motions. In order to avoid this problem, more data need to be collected to eliminate individual differences.
- (2)
Frame rates
According to the results of
Figure 12, the test using 15 frames has a highest correct answer rate than the test using others in the LSTM network. For the 3D CNN, correct answer rates are close between 15 and 20 frames, those between 10 and 14 frames are slightly smaller. Therefore, considering the calculation time, it can be said that the setting of 15 frames is better than the others. Of course, it depends on the sampling rate, and thus it should be selected based on the target movement.
- (3)
Computation time
On the PC with a GPU, the LSTM network could provide full real-time motion estimation at speeds of 15 fps; meanwhile, the 3D CNN can realize 8 fps estimation. The calculation time required for the 3D CNN is obviously longer than that of the LSTM network. However, due to the low-resolution grayscale image used in this system, it does not affect the actual application process.
- (4)
Multi-target detection
As the number of targets increases, the accuracies of motion detection and participant number estimation decrease. The main reason for this result is that when the targets are close to one another, the system regards them as one lager target and makes a misjudgment. It is possible that if a higher-resolution sensor is used, the accuracy might increase; however, the privacy invasion problem is also considered. It becomes a trade-off between privacy and accuracy; therefore, a suitable sensor resolution and setting need to be considered.
6.2. Performance Metrics and Comparison
In order to compare our system to other studies, the effectiveness of the classifiers is confirmed by five metrics [
63]. Each metric is expressed as follows:
where, TP, FP, TN and FN are true positives, false positives, true negatives, and false negatives, respectively. In these metrics, the seven motions other than falling are categorized into non-falling (negatives).
Table 8 shows performance and characteristics of our proposed system and other studies using infrared sensors.
The recent research of [
26] used a CNN with an LSTM network for fall detection using UWB and compared their proposed methods to other research with a CNN in the cross-validation results. The results of their methods showed better evaluation values of 95.78%, 98.04%, and 95.33% for accuracy, recall, and specificity, respectively.
In the research of [
30] using pyroelectric infrared sensors for fall detection, their proposed method with a second-layer random forest had 92.51% mean accuracy. In the research of [
31], which used infrared sensors and detected falling, the proposed method with an SVM showed evaluation values of 92.45%, 98.00%, and 95.14% for precision, recall, and F1-measure, respectively. In the research of [
37], an infrared sensor with 32 × 32 resolution was used and could detect only falling and walking using pixel number threshold method, In the research of [
38], using deep convolutional neural network, they could achieve high accuracy; however, because of the small number of participants, the availability of the method is unclear.
From the comparison results, even though the performance metrics of these studies cannot be compared directly due to different experiment settings, it can be said that our proposed method with a 3D CNN is sufficiently accurate and highly useful.
The research of [
31] used very unique and interesting idea to realize motion detection using multiple low-resolution infrared sensors. Each sensor was connected to sensor network and the detection area was easily expanded in the system. However, to detect motions in an area of 3 × 3.75 m, they needed 20 sensor nodes, which leads to an increase in system construction cost. In contrast, our proposed system uses one device to detect motions in an area of 4 × 5 m, and we can expand the detection area by using several devices independently. When we need to watch a wide area, some devices can be located on the grid on the ceiling and all devices are connected with Wi-Fi. They can also be placed separately at the entrance of a room or in a dangerous place. This means that our system has high flexibility in the construction of a fall detection system.
6.3. Limitation of the System
After subtraction of background in a thermo image, in almost all cases, temperature distribution of a human is within 5 °C as shown in
Figure 5. The noise equivalent temperature difference of this sensor is 0.1 to 0.25 K, which depends on a sampling rate. Therefore, we can detect the target human as a gradient object by using this sensor. However, when the height of the sensor to be attached on the ceil is changed to a certain extent, the pixel size of the target could be changed. It may cause decrease in detection accuracy. Provided that we use a higher resolution infrared sensor, the accuracy can be improved more; however, as mentioned above, the risk of privacy invasion should be considered at the same time.
When a heat source other than a human exists in the detection area and its temperature fluctuates frequently, the system may misidentify it as a human. Provided that the position of the heat source is known in advance, a masking process can be applied on the thermo image in the preprocessing to ignore the effect of the heat source.
7. Conclusions
In this research, a human motion detection system based on an infrared array sensor was developed for recognizing elderly people’s fundamental motions and detecting emergencies while protecting the privacy of people to be cared for. Compared with existing human motion detection systems, the proposed system was faced with fewer limitations and had a wide application. The six features were extracted considering the characteristics of human motions for the LSTM training. The 3D CNN was applied to motion detection and the input was time series image data.
During the human motion detection experiments, 50 sets of data for each motion in eight motions, including falling, standing, standing-to-sitting, sitting, sitting-to-standing, bowing, crouching, and walking of 16 participants were obtained, which means that 800 sets of data were collected for each motion.
In this research, the correct answer rates of the LSTM network and the 3D CNN were 82.5% and 94.2%, respectively. The results show that the proposed system with the 3D CNN has the ability to detect eight motions among 16 participants with high accuracy.
Author Contributions
Conceptualization, S.T. and F.M.; methodology, F.M.; software, F.M. and R.Q.; validation, S.T., F.M. and R.Q.; investigation, Y.H. and F.M.; resources, Y.H.; data curation, F.M. and R.Q.; writing—original draft preparation, R.Q. and F.M.; writing—review and editing, R.Q. and S.T.; supervision, S.T.; project administration, S.T.; funding acquisition, Y.H. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by JSPS KAKENHI Grant-in-Aid for Early-Career Scientists, Grant Number 18K17629.
Conflicts of Interest
The authors declare no conflict of interest.
Ethical Statements
All participants gave their informed consent for inclusion before they participated in the study. The study was conducted in accordance with the Declaration of Helsinki, and the protocol was approved by the Ethics Committee of H29-230.
References
- Cajamarca, G.; Herskovic, V.; Rossel, P.O. Enabling Older Adults’ Health Self-Management through Self-Report and Visualization—A Systematic Literature Review. Sensors 2020, 20, 4348. [Google Scholar] [CrossRef] [PubMed]
- Bone, A.E.; Gomes, B.; Etkind, S.N.; Verne, J.; Murtagh, F.E.; Evans, C.J.; Higginson, I.J. What is the impact of population ageing on the future provision of end-of-life care? Population-based projections of place of death. Palliat. Med. 2018, 32, 329–336. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jensen, J.; Lundin-Olsson, L.; Nyberg, L.; Gustafson, Y. Fall and Injury Prevention in Older People Living in Residential Care Facilities: A Cluster Randomized Trial. Ann. Intern. Med. 2002, 136, 733–741. [Google Scholar] [CrossRef]
- Muggleton, S. Alan Turing and the Development of Artificial Intelligence. AI Commun. 2014, 27, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Igual, R.; Medrano, C.; Plaza, I. Challenges, issues and trends in fall detection systems. BioMed. Eng. Online 2013, 12, 66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- World Health Organization Website. Available online: https://www.who.int/news-room/fact-sheets/detail/deafness-and-hearing-loss (accessed on 10 August 2020).
- Chui, K.T.; Alhalabi, W.; Pang, S.S.H.; Pablos, P.O.; Liu, R.W.; Zhao, M. Disease Diagnosis in Smart Healthcare: Innovation, Technologies and Applications. Sustainability 2017, 9, 2309. [Google Scholar] [CrossRef] [Green Version]
- Scheffler, R.; Cometto, G.; Tulenko, K.; Bruckner, T.; Liu, J.; Keuffel, E.L.; Preker, A.; Stilwell, B.; Brasileiro, J.; Campbell, J. Health Workforce Requirements for Universal Health Coverage and the Sustainable Development Goals; World Health Organization: Geneva, Switzerland, 2016. [Google Scholar]
- Beard, J.; Ferguson, L.; Marmot, M.; Nash, P.; Phillips, D.; Staudinge, U.; Dua, T.; Saxena, S.; Ogawa, H.; Petersen, P.E.; et al. World Report on Ageing and Health 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Voermans, N.C.; Snijders, A.H.; Schoon, Y.; Bloem, B.R. Why old people fall (and how to stop them). Pract. Neurol. 2007, 7, 158–171. [Google Scholar] [CrossRef]
- Stevens, J.A.; Corso, P.S.; Finkelstein, E.A.; Lee, R. The costs of fatal and non-fatal falls among older adults. Inj. Prev. 2006, 12, 290–295. [Google Scholar] [CrossRef] [Green Version]
- Buisseret, F.; Catinus, L.; Grenard, R.; Jojczyk, L.; Fievez, D.; Barvaux, V.; Dierick, F. Timed Up and Go and Six-Minute Walking Tests with Wearable Inertial Sensor: One Step Further for the Prediction of the Risk of Fall in Elderly Nursing Home People. Sensors 2020, 20, 3207. [Google Scholar] [CrossRef]
- Wang, Z.; Ramamoorthy, V.; Gal, U.; Guez, A. Possible Life Saver: A Review on Human Fall Detection Technology. Robotics 2020, 9, 55. [Google Scholar] [CrossRef]
- Rucco, R.; Sorriso, A.; Liparoti, M.; Ferraioli, G.; Sorrentino, P.; Ambrosanio, M.; Baselice, F. Type and Location of Wearable Sensors for Monitoring Falls during Static and Dynamic Tasks in Healthy Elderly: A Review. Sensors 2018, 18, 1613. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mathie, M.J.; Coster, A.C.F.; Lovell, N.H.; Celler, B.G. Accelerometry: Providing an integrated, practical method for long-term, ambulatory monitoring of human movement. Physiol. Meas. 2004, 25, 1–20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bianchi, F.; Redmond, S.J.; Narayanan, M.R.; Cerutti, S.; Lovell, N.H. Barometric Pressure and Triaxial Accelerometry-Based Falls Event Detection. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 619–627. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Tian, H.; Tateno, S. Hazard Level Discriminated Fall-Detection System Using Machine Learning Algorithms Based on Wearable-Sensor Network. In Proceedings of the International Automatic Control Conference (CACS), Pingtung, Taiwan, 12–15 November 2017; p. 6. [Google Scholar]
- Chaudhuri, S.; Thompson, H.; Demiris, G. Fall detection devices and their use with older adults: A systematic review. J. Geriatr. Phys. Ther. 2014, 37, 178–196. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Miguel, K.; Brunete, A.; Hernando, M.; Gambao, E. Home Camera-Based Fall Detection System for the Elderly. Sensors 2017, 17, 2864. [Google Scholar] [CrossRef] [Green Version]
- Yu, M.; Rhuma, A.; Naqvi, S.M.; Chambers, J. Fall detection for the elderly in a smart room by using an enhanced one class support vector machine. In Proceedings of the IEEE International Conference on Digital Signal Processing, Corfu, Greece, 6–8 July 2011; pp. 1–6. [Google Scholar]
- Merrouche, F.; Baha, N. Depth camera based fall detection using human shape and movement. In Proceedings of the IEEE International Conference on Signal & Image Processing IEEE, Beijing, China, 4–6 August 2017; pp. 586–590. [Google Scholar]
- Chelli, A.; Pätzold, M. A Machine Learning Approach for Fall Detection Based on the Instantaneous Doppler Frequency. IEEE Access 2019, 7, 166173–166189. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. WiFall: Device-Free Fall Detection by Wireless Networks. IEEE Trans. Mob. Comput. 2017, 16, 581–594. [Google Scholar] [CrossRef]
- Mokhtari, G.; Aminikhanghahi, S.; Zhang, Q.; Cook, D.J. Fall detection in smart home environments using UWB sensors and unsupervised change detection. J. Reliab. Intell. Environ. 2018, 4, 131–139. [Google Scholar] [CrossRef]
- Sadreazami, H.; Bolic, M.; Rajan, S. Fall Detection Using Standoff Radar-Based Sensing and Deep Convolutional Neural Network. IEEE Trans. Circuits Syst. Express Briefs 2020, 67, 197–201. [Google Scholar] [CrossRef]
- Ma, L.; Liu, M.; Wang, N.; Wang, L.; Yang, Y.; Wang, H. Room-Level Fall Detection Based on Ultra-Wideband (UWB) Monostatic Radar and Convolutional Long Short-Term Memory (LSTM). Sensors 2020, 20, 1105. [Google Scholar] [CrossRef] [Green Version]
- Ryoo, M.S.; Rothrock, B.; Fleming, C.; Yang, H.J. Privacy-Preserving Human Activity Recognition from Extreme Low Resolution. AAAI 2017, 4255–4262. [Google Scholar]
- Baek, J.; Hong, S.; Kim, J.; Kim, E. Efficient Pedestrian Detection at Nighttime Using a Thermal Camera. Sensors 2017, 17, 1850. [Google Scholar] [CrossRef] [Green Version]
- Ullah, I.; Qureshi, M.B.; Khan, U.; Memon, S.A.; Shi, Y.; Peng, D. Multisensor-Based Target-Tracking Algorithm with Out-of-Sequence-Measurements in Cluttered Environments. Sensors 2018, 18, 4043. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, X.; Guan, Q.; Tan, H.; Gao, L.; Wang, Z.; Luo, X. Simultaneous Indoor Tracking and Activity Recognition Using Pyroelectric Infrared Sensors. Sensors 2017, 17, 1738. [Google Scholar] [CrossRef] [PubMed]
- Tao, S.; Kudo, M.; Nonaka, H. Privacy-Preserved Behavior Analysis and Fall Detection by an Infrared Ceiling Sensor Network. Sensors 2012, 12, 16920–16936. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mashiyama, S.; Hong, J.; Ohtsuki, T. Activity Recognition Using Low Resolution Infrared Array Sensor. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 495–500. [Google Scholar]
- Jankowski, S.; Szymański, Z.; Dziomin, U.; Mazurek, P.; Wagner, J. Deep Learning Classifier for Fall Detection Based on IR Distance Sensor Data. In Proceedings of the 2015 IEEE 8th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Warsaw, Poland, 24–26 September 2015; pp. 723–727. [Google Scholar]
- Chen, W.; Ma, H. A Fall Detection System Based on Infrared Array Sensors with Tracking Capability for the Elderly at Home. In Proceedings of the 2015 17th International Conference on E-health Networking, Application & Services (HealthCom), Boston, MA, USA, 14–17 October 2015; pp. 428–434. [Google Scholar]
- Hayashida, A.; Moshnyaga, V.; Hashimoto, K. New Approach for Indoor Fall Detection by Infrared Thermal Array Sensor. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 1410–1413. [Google Scholar]
- Taramasco, C.; Rodenas, T.; Martinez, F.; Fuentes, P.; Munoz, R.; Olivares, R.; Albuquerque, V.C.; Demongeot, J. A novel monitoring system for fall detection in older people. IEEE Access 2018, 6, 43563–43574. [Google Scholar] [CrossRef]
- Liang, Q.; Yu, L.; Zhai, W.; Wan, Z.; Nie, H. Activity Recognition Based on Thermopile Imaging Array Sensor. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, USA, 3–5 May 2018; pp. 0770–0773. [Google Scholar]
- Gochoo, M.; Tan, T.; Batjargal, T.; Seredin, O.; Huang, S. Device-Free Non-Privacy Invasive Indoor Human Posture Recognition Using Low-Resolution Infrared Sensor-Based Wireless Sensor Networks and DCNN. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2311–2316. [Google Scholar]
- Adolf, J.; Macas, M.; Lhotska, L.; Dolezal, J. Deep Neural Network Based Body Posture Recognitions and Fall Detection from Low Resolution Infrared Array Sensor. In Proceedings of the 2018 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Madrid, Spain, 3–6 December 2018; pp. 2394–2399. [Google Scholar]
- Ogawa, Y.; Naito, K. Fall Detection Scheme Based on Temperature Distribution with IR Array Sensor. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 10–12 January 2020; pp. 1–5. [Google Scholar]
- Liu, Z.; Yang, M.; Yuan, Y.; Chan, K. Fall detection and personnel tracking system using infrared array sensors. IEEE Sens. J. 2020, 20, 9558–9566. [Google Scholar] [CrossRef]
- Tanaka, J.; Shiozaki, M.; Aita, F.; Seki, T.; Oba, M. Thermopile infrared array sensor for human detector application. In Proceedings of the IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; pp. 1213–1216. [Google Scholar]
- Trofimova, A.; Masciadri, A.; Veronese, F.; Salice, F. Indoor human detection based on thermal array sensor data and adaptive background estimation. J. Comput. Commun. 2017, 5, 16–28. [Google Scholar] [CrossRef] [Green Version]
- Kerridge, J.; Armitage, A.; Binnie, D.; Lei, L.; Sumpter, N. Using Low-Cost Infrared Detectors to Monitor Movement of Pedestrians: Initial Findings. Transp. Res. Rec. 2004, 1878, 11–18. [Google Scholar] [CrossRef]
- Tateno, S.; Zhu, Y.; Meng, F. Hand gesture recognition system for in-car device control based on infrared array sensor. In Proceedings of the SICE Annual Conference, Hiroshima, Japan, 10–13 September 2019; pp. 701–706. [Google Scholar]
- Tateno, S.; Zhu, Y.; Meng, F. In-Vehicle Device Control System by Hand Posture Recognition with Movement Detection Using Infrared Array Sensor. SICE J. Control Meas. Syst. Integr. 2020, 13, 148–156. [Google Scholar] [CrossRef]
- Arandjelovic, R.; Gronat, P.; Torii, A.; Pajdla, T.; Sivic, J. NetVLAD: CNN architecture for weakly supervised place recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 1437–1451. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, H.; Chuang, J.; Liu, T. Regularized background adaptation: A novel learning rate control scheme for Gaussian mixture modeling. IEEE Trans. Image Process. 2011, 20, 822–836. [Google Scholar] [PubMed]
- Wang, X.; Gao, L.; Song, J.; Shen, H. Beyond frame-level CNN: Saliency-aware 3-D CNN with LSTM for video action recognition. IEEE Signal Process. Lett. 2016, 24, 510–514. [Google Scholar] [CrossRef]
- Anvarov, F.; Kim, D.H.; Song, B.C. Action Recognition Using Deep 3D CNNs with Sequential Feature Aggregation and Attention. Electronics 2020, 9, 147. [Google Scholar] [CrossRef] [Green Version]
- Patwardhan, A. Three-Dimensional, Kinematic, Human Behavioral Pattern-Based Features for Multimodal Emotion Recognition. Multimodal Technol. Interact. 2017, 1, 19. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Shahroudy, A.; Xu, D.; Kot, A.C.; Wang, G. Skeleton-based action recognition using spatio-temporal lstm network with trust gates. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 3007–3021. [Google Scholar] [CrossRef] [Green Version]
- Ji, S.; Xu, W.; Yang, M.; Yu, K. 3D convolutional neural networks for human action recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Li, S.; Shan, S.; Wang, R.; Chen, X. Deeply learning deformable facial action parts model for dynamic expression analysis. In Computer Vision-ACCV; Springer: Cham, Switzerland, 2014; pp. 143–157. [Google Scholar]
- Yu, G.; Li, T. Recognition of human continuous action with 3D CNN. In Computer Vision Systems; Springer: Cham, Switzerland, 2017; pp. 314–322. [Google Scholar]
- Sherstinsky, A. Fundamentals of recurrent neural network (rnn) and long short-term memory (lstm) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Shahroudy, A.; Xu, D.; Wang, G. Spatio-temporal lstm with trust gates for 3d human action recognition. In Computer Vision—ECCV; Springer: Cham, Switzerland, 2016; pp. 816–833. [Google Scholar]
- Liu, J.; Wang, G.; Duan, L.Y.; Abdiyeva, K.; Kot, A.C. Skeleton-based human action recognition with global context-aware attention LSTM networks. IEEE Trans. Image Process. 2017, 27, 1586–1599. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Shirahama, K.; Nisar, M.A.; Köping, L.; Grzegorzek, M. Comparison of Feature Learning Methods for Human Activity Recognition Using Wearable Sensors. Sensors 2018, 18, 679. [Google Scholar] [CrossRef] [Green Version]
- Tong, K.; Wang, Z.; Si, L.; Tan, C.; Li, P. A Novel Pipeline Leak Recognition Method of Mine Air Compressor Based on Infrared Thermal Image Using IFA and SVM. Appl. Sci. 2020, 10, 5991. [Google Scholar] [CrossRef]
- Huang, G.; Yang, X.; Liu, Q.; Liang, Z.; Qu, K. Detecting Method for Resolvable Group-target Separation Based on Standard Deviational Ellipse. In Proceedings of the IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar]
- Liu, Y. Create Stable Neural Networks by Cross-Validation. In Proceedings of the IEEE International Joint Conference on Neural Network Proceedings, Vancouver, BC, Canada, 16–21 July 2006; pp. 3925–3928. [Google Scholar]
- Altman, D.G.; Bland, J.M. Diagnostic tests. 1: Sensitivity and specificity. BMJ 1994, 308, 1552. [Google Scholar] [CrossRef] [PubMed] [Green Version]
Figure 1.
The M5Stack and the infrared array sensor.
Figure 1.
The M5Stack and the infrared array sensor.
Figure 2.
Example of far-infrared imaging: (a) original image; (b) far-infrared imaging.
Figure 2.
Example of far-infrared imaging: (a) original image; (b) far-infrared imaging.
Figure 3.
Flow chart of the proposed system.
Figure 3.
Flow chart of the proposed system.
Figure 4.
Example of temperature distribution: (a) data before Gaussian filtering; (b) data after Gaussian filtering; (c) data of background; (d) data after background subtraction.
Figure 4.
Example of temperature distribution: (a) data before Gaussian filtering; (b) data after Gaussian filtering; (c) data of background; (d) data after background subtraction.
Figure 5.
The human detection in the infrared data.
Figure 5.
The human detection in the infrared data.
Figure 6.
The adjusted center point of the target in the infrared data.
Figure 6.
The adjusted center point of the target in the infrared data.
Figure 7.
A 2D convolution and a 3D convolution: (a) description of the 2D convolutional neural network (CNN); (b) description of the 3D CNN.
Figure 7.
A 2D convolution and a 3D convolution: (a) description of the 2D convolutional neural network (CNN); (b) description of the 3D CNN.
Figure 8.
Flow chart of the 3D convolutional neural network (CNN).
Figure 8.
Flow chart of the 3D convolutional neural network (CNN).
Figure 9.
Flow chart of the long short-term memory (LSTM) network.
Figure 9.
Flow chart of the long short-term memory (LSTM) network.
Figure 10.
Image description of and .
Figure 10.
Image description of and .
Figure 11.
Diagram of experiment environment.
Figure 11.
Diagram of experiment environment.
Figure 12.
Correct answer rates of LSTM network and 3D CNN for each frame number.
Figure 12.
Correct answer rates of LSTM network and 3D CNN for each frame number.
Figure 13.
Multi-target detection.
Figure 13.
Multi-target detection.
Table 1.
Comparison with other studies using infrared sensors.
Table 1.
Comparison with other studies using infrared sensors.
| Study | Year | IR Sensor (Resolution) | Number of Sensors | Activities | Participants | Method | Limitations |
|---|
| Luo [30] | 2017 | pyroelectric | 5 | falling, walking, standing, lying, transitional | 3 | random Forest | L1 |
| Tao [31] | 2012 | 1 × 1 | 20 | falling, walking, tidying,
watching TV,
reading taking drinks,
using PC, lying, sweeping | 1 | martingale framework | |
| Mashiyama [32] | 2015 | 8 × 8 | 1 | stopping, walking, sitting,
falling | 6 | support vector machine | L1 |
| Jankowski [33] | 2015 | distance | 2 | falling | 2 | NN | L1,L2,L3 |
nonlinear principal
component
analysis NN |
| Chen [34] | 2015 | 16 × 4 | 2 | falling | 5 | k-nearest neighbor | L1,L2,L3 |
| Hayashida [35] | 2017 | 8 × 8 | 1 | falling | 7 | distance threshold | L1,L3 |
| Taramasco [36] | 2018 | 1 × 8 | 2 | falling, walking, jogging,
sitting, crouching,
jumping, rotating | 4 | bidirectional-LSTM | L1 L2 |
| LSTM |
| gated recurrent unit |
| Liang [37] | 2018 | 32 × 32 | 1 | falling, walking | - | pixel number threshold | L1 L2 |
| Gochoo [38] | 2018 | 16 × 16 | 3 | standing, hand raising,
squat, akimbo, crawl,
toe touch, lying,
open wide arms | 4 | deep convolutional neural network | L1 L2 |
| Adolf [39] | 2018 | 8 × 8 | 1 | standing, sitting, lying | 4 | Inception v3 neural network | L1 |
| Ogawa [40] | 2020 | 4 × 16 | 2 | falling, walking. lying | 10 | voting | |
| Liu [41] | 2020 | 8 × 8 | 1 | falling | 8 | random Forest | L1,L3 |
Table 2.
Target motions in the motion detection system.
Table 2.
Target motions in the motion detection system.
| Motion Name | Repetitions | Motion Type |
|---|
| falling | 50 | One motion |
| sitting to standing (sit2stand) | 50 | One motion |
| standing to sitting (stand2sit) | 50 | One motion |
| sitting | 50 | Static motion |
| standing | 50 | Static motion |
| bowing | 50 | One motion |
| crouching | 50 | Static motion |
| walking | 50 | Continuous motion |
Table 3.
Result of motion detection with the LSTM network.
Table 3.
Result of motion detection with the LSTM network.
| Real | Detected | Correct Answer Rate |
|---|
| Falling | Sit2stand | Stand2sit | Sitting | Standing | Bowing | Crouching | Walking |
|---|
| falling | 740 | 3 | 21 | 6 | 8 | 4 | 1 | 17 | 92.5% |
| sit2stand | 26 | 724 | 9 | 0 | 9 | 7 | 14 | 11 | 90.5% |
| stand2sit | 37 | 1 | 694 | 38 | 5 | 3 | 19 | 3 | 86.8% |
| sitting | 4 | 0 | 1 | 626 | 26 | 97 | 35 | 11 | 78.3% |
| standing | 7 | 0 | 0 | 18 | 630 | 80 | 57 | 8 | 78.8% |
| bowing | 5 | 3 | 1 | 26 | 16 | 649 | 98 | 2 | 81.1% |
| crouching | 0 | 4 | 4 | 32 | 22 | 138 | 593 | 7 | 74.1% |
| walking | 2 | 41 | 7 | 15 | 10 | 45 | 50 | 630 | 78.8% |
Table 4.
Result of motion detection with the 3D CNN.
Table 4.
Result of motion detection with the 3D CNN.
| Real | Detected | Correct Answer Rate |
|---|
| Falling | Sit2stand | Stand2sit | Sitting | Standing | Bowing | Crouching | Walking |
|---|
| falling | 748 | 0 | 0 | 0 | 0 | 0 | 0 | 52 | 93.5% |
| sit2stand | 0 | 720 | 0 | 28 | 4 | 0 | 0 | 48 | 90.0% |
| stand2sit | 5 | 0 | 793 | 2 | 0 | 0 | 0 | 0 | 99.1% |
| sitting | 0 | 0 | 0 | 745 | 51 | 0 | 0 | 4 | 93.1% |
| standing | 0 | 0 | 0 | 19 | 769 | 0 | 0 | 12 | 96.1% |
| bowing | 0 | 8 | 0 | 8 | 7 | 721 | 42 | 14 | 90.1% |
| crouching | 0 | 0 | 0 | 23 | 0 | 5 | 765 | 7 | 95.6% |
| walking | 23 | 4 | 0 | 0 | 0 | 0 | 6 | 767 | 95.9% |
Table 5.
The average, maximum and minimum correct answer rate with the 3D CNN.
Table 5.
The average, maximum and minimum correct answer rate with the 3D CNN.
| Motion | Average | Maximum | Minimum |
|---|
| falling | 93.5% | 99% | 84% |
| sit2stand | 90.0% | 96% | 80% |
| stand2sit | 99.1% | 100% | 93% |
| sitting | 93.1% | 96% | 80% |
| standing | 96.1% | 99% | 87% |
| bowing | 90.1% | 93% | 82% |
| crouching | 95.6% | 98% | 90% |
| walking | 95.8% | 99% | 84% |
| total | 94.2% | 97.5% | 85.0% |
Table 6.
Result of calculation time for 15 frames input data with/without a graphics processing unit (GPU).
Table 6.
Result of calculation time for 15 frames input data with/without a graphics processing unit (GPU).
| | With GPU | Without GPU |
|---|
| LSTM network training | 1.5 h | 3 h |
| 3D CNN training | 2 h | 5 h |
| LSTM network testing | 0.02 sec | 0.07 sec |
| 3D CNN testing | 0.12 sec | 0.65 sec |
Table 7.
Result of multi-target detection with the 3D CNN.
Table 7.
Result of multi-target detection with the 3D CNN.
| Number of Participant(s) | Correct Answer Rate of Motion | Correct Answer Rate of Participant Number Estimation |
|---|
| 1 | 92% | 100% |
| 2 | 84% | 91% |
| 3 | 72% | 85% |
Table 8.
Comparison with other studies using infrared sensors.
Table 8.
Comparison with other studies using infrared sensors.
| Study | IR Sensor
(Resolution) | Number of
Sensors | Activities | Participants | Method | Recall (%) | Precision (%) | Specificity (%) | F1-Measure (%) | Accuracy (%) |
|---|
| [30] | pyroelectric | 5 | falling, walking, standing,
lying, transitional | 3 | random Forest | - | - | - | - | 92.51 |
| [31] | 1 × 1 | 20 | falling, walking, tidying,
watching TV,
reading taking drinks,
using PC, lying, sweeping | 1 | martingale framework | 98 | 92.45 | - | 95.14 | - |
| [32] | 8 × 8 | 1 | stopping, walking, sitting,
falling | 6 | support vector machine | - | - | - | - | 94.7 |
| [33] | distance | 2 | falling | 2 | NN | 89 | 86 | - | - | - |
nonlinear principal
component
analysis NN | 92 | 93 | - | - | - |
| [34] | 16 × 4 | 2 | falling | 5 | k-nearest neighbor | 95.3 | - | 90.8 | - | 93 |
| [35] | 8 × 8 | 1 | falling | 7 | distance threshold | - | - | - | - | 83–97 |
| [36] | 1 × 8 | 2 | falling, walking, jogging,
sitting, crouching,
jumping, rotating | 4 | bidirectional-LSTM | 93 | - | 93 | - | 93 |
| LSTM | 89 | - | 93 | - | 91 |
| gated recurrent unit | 85 | - | 89 | - | 87.5 |
| [37] | 32 × 32 | 1 | falling, walking | - | pixel number threshold | - | - | - | - | 95 |
| [38] | 16 × 16 | 3 | standing, hand raising,
squat, akimbo, crawl,
toe touch, lying,
open wide arms | 4 | deep convolutional
neural network | 98.2 | 98.3 | 99.7 | 98.1 | 99.5 |
| [39] | 8 × 8 | 1 | standing, sitting, lying | 4 | Inception v3 neural network | 45.6 | - | 86.2 | - | - |
| [40] | 4 × 16 | 2 | falling, walking. lying | 10 | voting | - | - | - | - | 97.8 |
| [41] | 8 × 8 | 1 | falling | 8 | random Forest | 96 | 96 | - | 96 | - |
| ours | 32 × 24 | 1 | falling, sitting to standing,
standing to sitting, sitting,
standing, crouching,
bowing, walking | 16 | LSTM | 92.5 | 90.1 | 98.5 | 91.3 | 97.8 |
| 3D CNN | 93.5 | 96.4 | 99.5 | 94.9 | 98.8 |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}